[neuer Adapter] smartgarden adapter for Gardena smart system
-
@jpgorganizer Habe eben mit der Gardenaapp die Ventile manuell gesteuert. Da werden die States korrekt angezeigt. Evtl habe ich ein Problem mit meinem Script. Ich werde das erst nochmal überprüfen ob da der Fehler liegt. Melde mich...
-
jetzt habe ich gerade die
600im DPduration_valuegesehen. Auf meinem Handy habe ich die Zahl vorhin nicht gesehen. Warum auch immer.Aber das erinnert mich an
https://github.com/jpgorganizer/ioBroker.smartgarden/issues/28Vielleicht auch dein Problem.
closed No reaction on changing activity_control_i #28
-
Mail an den Support ist raus
-
Moin zusammen,
lange Zeit hat mein Mäher nur arbeiten dürfen / müssen, jetzt habe ich ein altes Thema wieder hoch geholt.
Ich will an der Hütte das Rolltor in Betrieb nehmen. Hardware zur Steuerung steht schon, der Roboter ist nur - wie erwartet - zu schnell am Tor, wenn ich das nach "OK_LEAVING" einfach hoch fahre.
Idee: ich fange das OK_LEAVING ab und parke den Mäher wieder, Tor wird hoch gefahren, danach schicke ich den Roboter wieder nach Zeitplan auf den Weg.Funktioniert so nur leider nicht

Zwei Verständnisfragen vorweg:
Den aktuellen Zustand frage ich über activity_value ab und die Befehle schicke ich an activity_control_i, oder?Mein System sieht so aus:
Node.js v12.22.2
NPM 6.14.12
js-controller 3.2.16
Admin: 5.1.9
Smartgarden 1.0.5
Das Skript sieht so aus:
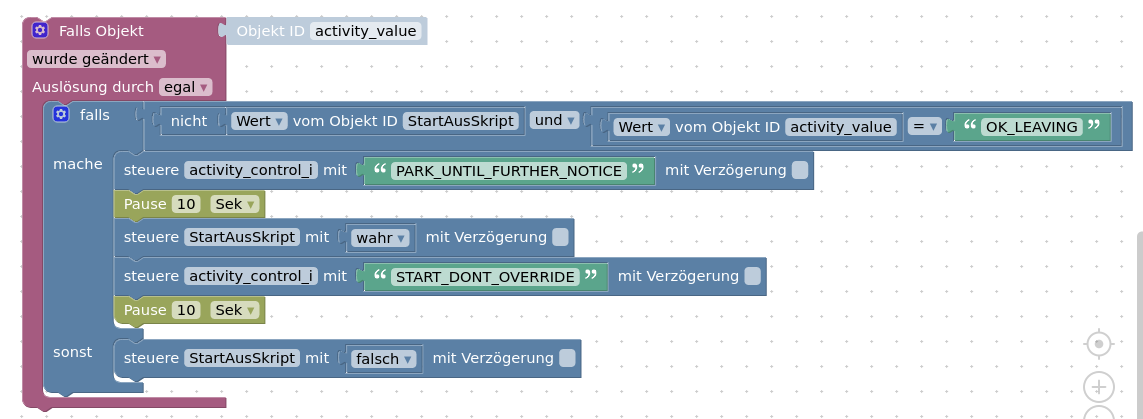
bzw.:<block xmlns="https://developers.google.com/blockly/xml" type="on_ext" id="0cldvv1U?jrOj3P,khDs" x="-1612" y="163"> <mutation xmlns="http://www.w3.org/1999/xhtml" items="1"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="Xa+^tK:lsXS?RpU-@}|a"> <field name="oid">smartgarden.0.LOCATION_[...].activity_value</field> </shadow> </value> <statement name="STATEMENT"> <block type="controls_if" id="odAePuB[gwN71?dW~[Mf"> <mutation else="1"></mutation> <value name="IF0"> <block type="logic_operation" id="tys|p?)SnoPEH=27V~_H"> <field name="OP">AND</field> <value name="A"> <block type="logic_negate" id="QW*Exfm7/cqkcsSxkXHF"> <value name="BOOL"> <block type="get_value" id="0;~Z}Z#0XQ*k5oRqjgQ*"> <field name="ATTR">val</field> <field name="OID">0_userdata.0.HerrKrause.StartAusSkript</field> </block> </value> </block> </value> <value name="B"> <block type="logic_compare" id="M2f{$*aNW,IDolJp-c8^"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="m!5Cmu]iC3Oe6`N3_%t3"> <field name="ATTR">val</field> <field name="OID">smartgarden.0.[...].activity_value</field> </block> </value> <value name="B"> <block type="text" id="xl4#Ba|w6^i2Li+BGU,T"> <field name="TEXT">OK_LEAVING</field> </block> </value> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="~pdfUkmzsy)Ov;F6#n.N"> <mutation xmlns="http://www.w3.org/1999/xhtml" delay_input="false"></mutation> <field name="OID">smartgarden.0.[...].activity_control_i</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="text" id="SL.ce=h@4Yj!oPBhOrbA"> <field name="TEXT">PARK_UNTIL_FURTHER_NOTICE</field> </block> </value> <next> <block type="timeouts_wait" id="5:]c%$Nz2~T|*KD+DNxg"> <field name="DELAY">10</field> <field name="UNIT">sec</field> <next> <block type="control" id="UJWS~m%PfRTfYR66]L0J"> <mutation xmlns="http://www.w3.org/1999/xhtml" delay_input="false"></mutation> <field name="OID">0_userdata.0.HerrKrause.StartAusSkript</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="w$4R9*7hrW/Qd!)J2`kH"> <field name="BOOL">TRUE</field> </block> </value> <next> <block type="control" id="$x/SE{U=Bo9V_Vkr|IbK"> <mutation xmlns="http://www.w3.org/1999/xhtml" delay_input="false"></mutation> <field name="OID">smartgarden.0.[...].activity_control_i</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="text" id="~H9j^N)_bWikGNLVl*;I"> <field name="TEXT">START_DONT_OVERRIDE</field> </block> </value> <next> <block type="timeouts_wait" id="?EeRVGA;OpdT?qs|$nqr"> <field name="DELAY">10</field> <field name="UNIT">sec</field> </block> </next> </block> </next> </block> </next> </block> </next> </block> </statement> <statement name="ELSE"> <block type="control" id="Ia|Sus94.gUDk7EGB}vU"> <mutation xmlns="http://www.w3.org/1999/xhtml" delay_input="false"></mutation> <field name="OID">0_userdata.0.HerrKrause.StartAusSkript</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="oP[:tu:uWrkDX0VFVPi7"> <field name="BOOL">FALSE</field> </block> </value> </block> </statement> </block> </statement> </block>Hat irgendjemand eine Idee, was ich übersehe?
Den Weg über einen eigenen Zeitplan würde ich gerne vermeiden")
Grüsse
Andreas -
@sirhenri sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
Zwei Verständnisfragen vorweg:
Den aktuellen Zustand frage ich über activity_value ab und die Befehle schicke ich an activity_control_i, oder?richtig
@sirhenri sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
Funktioniert so nur leider nicht
was sollte passieren und was passiert tatsächlich?
Ich glaube auch nicht, dass du einen Mäher, der noch quasi in der Ladestation steht sofort parken kannst, ohne dass er erstmal rausfährt, eine Runde dreht und dann wieder einparkt. Aber das ist nur eine Vermutung von mir.
-
@jpgorganizer Also ich habe den Fehler nicht finden können. Es funktioniert auch alles wie immer. Reboot tut gut! Trotzdem Danke für die schnellen Antworten
-
@jpgorganizer sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
@sirhenri sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
Funktioniert so nur leider nicht
was sollte passieren und was passiert tatsächlich?
die Idee war, das OK_LEAVING vom System abzufangen (das am Ende vom Skript selbst ereugte soll mit der Variablen unterdrückt werden), den Mäher wieder zu parken und mit Zeitverzug wieder entsprechend Zeitplan (da der letzte Befehl ja nicht bekannt ist) auf den Weg zu schicken.
Ich glaube auch nicht, dass du einen Mäher, der noch quasi in der Ladestation steht sofort parken kannst, ohne dass er erstmal rausfährt, eine Runde dreht und dann wieder einparkt. Aber das ist nur eine Vermutung von mir.
Sieht so aus, als wenn Du Recht hast. Gestern hab ich nur registirert, dass der Mäher aus der Ladestation raus gefahren ist. Heut hab ich mal die Objekte dierekt im Broker beobachtet - da passiert (leider muss ich jetzt wohl sagen) das, was im Skipt steht. Der Mäher fährt aber, so wie Du vermutet hast, trotzdem erst mal raus. Da bin/war ich wohl von den Reaktionszeiten des ESP8266, der die Tor-Hardware steuert, etwas verwöhnt. Der reagiert im Millisekundenbreich auf neue Zustände von Variablen.
Sieht so aus, als wenn der Zeitplan dann doch erst mal in Cronjobs abgebildet wird, bzw. ich Cronjobs an den Zeitplan der Gardena App dran hänge, um das Tor zu steuern. Das ist zwar erst mal alles andere als komfortabel, sollte ja aber wohl funktionieren.
Gruß
Andreas -
@sirhenri sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
Da bin/war ich wohl von den Reaktionszeiten des ESP8266, der die Tor-Hardware steuert, etwas verwöhnt. Der reagiert im Millisekundenbreich auf neue Zustände von Variablen.
naja, das ist grundsätzlich nicht vergleichbar. Der Mäher muss wieder einparken. Bei
OK_LEAVINGist er nicht mehr in der Ladestation, auch wenn er nur 1 cm weit rausgefahren ist. Und um Einzuparken will er auf dem Suchkabel entlang fahren. Und genau das wird er dann tun. Also fahren und Suchkabel suchen und dann wieder reinfahren. Da ist der limitierende Faktor weder Cloud noch irgendein Prozessor, sondern schlicht die Tatsache, dass es ein Fahrzeug ist, das nicht weiß wo es sich befindet.Bei deinem Rolladen am Tor ist das wesentlich einfacher. Strom aus und alles steht, Strom an und Rollo bewegt sich. Und das innerhalb von Millisekunden (wobei du vermutlich auch nicht hoch- und runterfahren im Millisekundenbereich umschalten kannst. Irgendeine Totzeit wird der Motor auch haben/machen.)
-
@flexer sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
@jpgorganizer Also ich habe den Fehler nicht finden können. Es funktioniert auch alles wie immer. Reboot tut gut! Trotzdem Danke für die schnellen Antworten
mir war nicht klar, dass das schon mal funktionierte ???? Stand das irgendwo?
Aber gut, wenn's geht.
-
@sirhenri Wie lange braucht das Tor zum hochfahren?
Im Kopf habe ich nämlich die Hütte auch bereits so gebaut...Reinfahren ist ja kein Problem, da kann man ja den Akkustand nehmen. Wäre schon schön, wenn man App & ioBroker gleichzeitig für den Mäher nutzen könnte.
-
@jpgorganizer sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
@sirhenri sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
Da bin/war ich wohl von den Reaktionszeiten des ESP8266, der die Tor-Hardware steuert, etwas verwöhnt. Der reagiert im Millisekundenbreich auf neue Zustände von Variablen.
naja, das ist grundsätzlich nicht vergleichbar. Der Mäher muss wieder einparken. Bei
OK_LEAVINGist er nicht mehr in der Ladestation, auch wenn er nur 1 cm weit rausgefahren ist.die Hoffnung war, anzuhalten bevor er losgefahren ist
-
Ich wundere mich ein bischen über diese Diskussion.
Ich hoffe, dass Ihr Euch über den Kommunikationsweg bewusst seit:- Befehl über APP oder API an die Husquarna Cloud
- Cloud gibt den Befel an das Gardena Gateway im LAN/WLAN weiter
- Gateway kommuniziert mit dem Robi über 866MHz.
- Robi bestätigt den Befehl / bzw. die Ausführung an Gateway
- Gateway gibt das an Cloud weiter
- Cloud an APP/API
Das alles dauert mehrere Sekunden ! Ich habe bis zu 10 Sekunden Verzögerung - Im Mittel 4-5 Sekunden
-
@oberfragger sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
@sirhenri Wie lange braucht das Tor zum hochfahren?
musste erst mal messen - ca. 9s
bei einer Einfahrtshöhe von 36 cmReinfahren ist ja kein Problem, da kann man ja den Akkustand nehmen.
da sollte SEARCHING im Status reichen -
@tp1de sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
Ich wundere mich ein bischen über diese Diskussion.
Das alles dauert mehrere Sekunden ! Ich habe bis zu 10 Sekunden Verzögerung - Im Mittel 4-5 Sekunden
das zieht sich - klar, aber ohne noch mal nachgemessen zu haben: das geht bei mir deutlich unter 4s, aber eben nicht rückwärts in der Zeit
Schön wäre hier ein Signal von Gardena: fahre in 2 min los...
Anforderungen wurden hier grade noch mal von "extern" runter gefahren - meine besser Hälfte meinte morgens auf und abends wieder zu tut's doch auch
 - das bekomme ich in jeden Fall hin
- das bekomme ich in jeden Fall hin 
-
@sirhenri sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
Anforderungen wurden hier grade noch mal von "extern" runter gefahren - meine besser Hälfte meinte morgens auf und abends wieder zu tut's doch auch
- das bekomme ich in jeden Fall hin Kann es sein, dass die das Thema nicht Ernst nimmt?!

-
@stevie77 sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
Kann es sein, dass die das Thema nicht Ernst nimmt?!
offensichtlich weit davon entfernt


-
Guten Morgen in die Runde, bei mir kommt heute die Meldung
2021-07-07 12:23:29.092 error Error: request returned 403 Forbidden
Anscheinend gibt es Probleme bei der Cloud. Kann das jemand bestätigen?
-
Ähnliches bei mir seit heute Morgen, allerdings mit dem Fehler: Error: request returned 401 Unauthorized
-
@happyuser20 Habe die Api nochmal neu angelegt und verbunden, jetzt geht wieder alles
-
@flexer sagte in [neuer Adapter] smartgarden adapter for Gardena smart system:
@happyuser20 Habe die Api nochmal neu angelegt und verbunden, jetzt geht wieder alles
ich habe keinen solchen Fehler in den Logs. Aber falls sich das häuft, dann bitte melden. Auch die Lösung von @Flexer ist ja nicht wirklich eine Lösung.
Einen solchen Fehler gab es vergangenes Jahr schon mal. Und falls der wieder auftaucht, dann sollten wir Gardena darüber informieren. Aber erst, wenn er wirklich mehrfach und bei vielen Usern auftritt. Ansonsten muss man von kurzen Server-/Internetproblemen ausgehen. Gardena hat damals sehr schnell reagiert und den Fehler behoben.

