


Neuer Robonect HX Adapter
-
Vielen Dank @braindead .
Habe leider gestern bei Gartenarbeiten aus versehen das Kabel durchgeschnitten :D
Muss daher erst warten bis Amazon meine Lieferung bringt. Werde es dann gleich testenDanke!
-
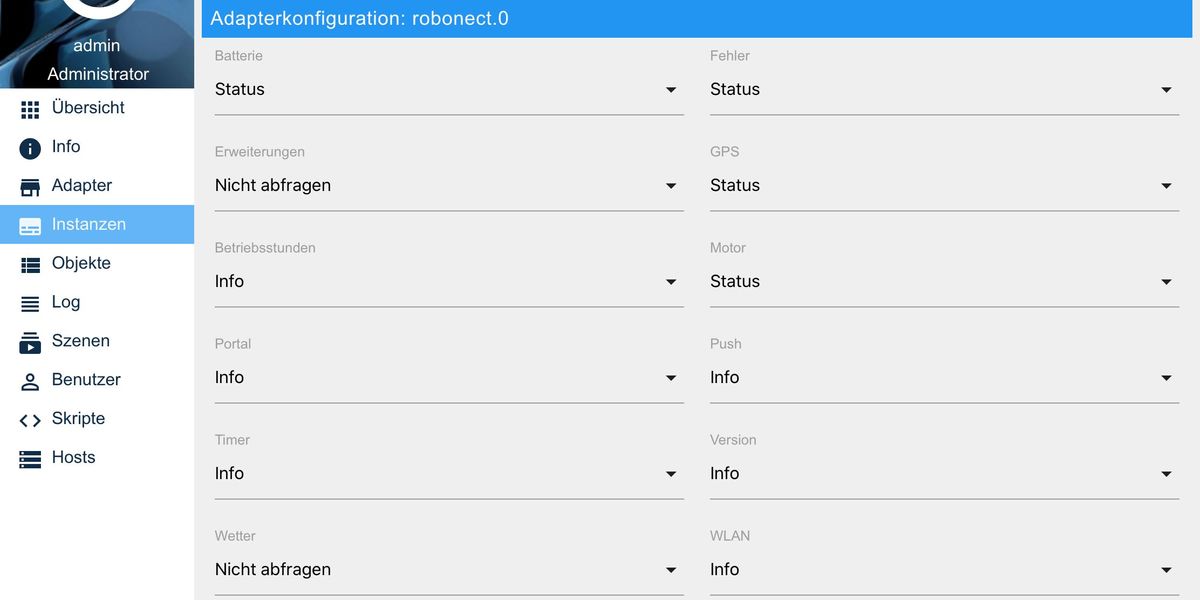
@darkiop und @stephan2k Da Ruhezeiten anscheinend für einige User wichtig sind, habe ich sie heute in den Adaper eingebaut.
Der Adapter bietet die Möglichkeit zwei Ruhezeiten zu definieren. Gedacht ist das für Mittags (z.B. 12:00 - 15:00) und Nachts (z.B. 22:00 - 08:00), es gehen aber natürlich beliebige Zeiten. Wenn die Felder leer bleiben, gibt es auch keine Ruhezeiten und die Abfragen laufen entsprechend durch.
Auch in den Ruhezeiten wird die API Abfrage /json?cmd=status jedes mal gemacht. Information, die so abgefragt werden kommen aus dem Speicher. Der Mähroboter wird nicht geweckt und piept demnach auch nicht. Hintergrund ist, dass man so zumindest die wichtigsten Infos im ioBroker hat. Alle anderen Abfragen, die als Status oder Info konfiguriert wurden, laufen in den Ruhezeiten nicht.
Könnt Ihr den Adapter bitte von GitHub installieren und testen, ob er so funktioniert, wie Ihr Euch das vorstellt? Wenn ich positive Rückmeldung von Euch habe, gebe ich die Version für das latest Repository frei.
@braindead Hab ihn installiert, erster Test sieht gut aus. Melde mich falls was auffällt.
-
@braindead kann es sein, dass bei den Motorgeschwindigkeiten robonect.0.motor.drive.left.speed und robonect.0.motor.drive.right.speed die Einheit mm/s anstatt der angezeigten cm/s sein sollte?
-
@braindead Hab ihn installiert, erster Test sieht gut aus. Melde mich falls was auffällt.
-
@Latzi Im Robonect Web Interface wird die Einheit cm/s benutzt. Ich habe aber ehrlich gesagt nicht überprüft,ob die Werte im Interace umgewandelt werden in cm/s. Wie kommst Du darauf, dass die Einheit nicht stimmt?
-
@braindead
bei mir wird im Web Interface z.B. ein wert von 13,1 cm/s angezeigt, im DP aber 131 cm/s -
@darkiop Sind Dir in Deinen Tests Probleme aufgefallen? Falls nicht, würde ich die Änderung gerne in das latest Repository übernehmen und den Adapter anschließend als Version 1.0 im stable Repository veröffentlichen wollen.
@braindead sagte in Neuer Robonect HX Adapter:
Sind Dir in Deinen Tests Probleme aufgefallen? Falls nicht, würde ich die Änderung gerne in das latest Repository übernehmen und den Adapter anschließend als Version 1.0 im stable Repository veröffentlichen wollen.
Nein, passt soweit - dolly dreht ihre Runden aktuell :)
-
@braindead sagte in Neuer Robonect HX Adapter:
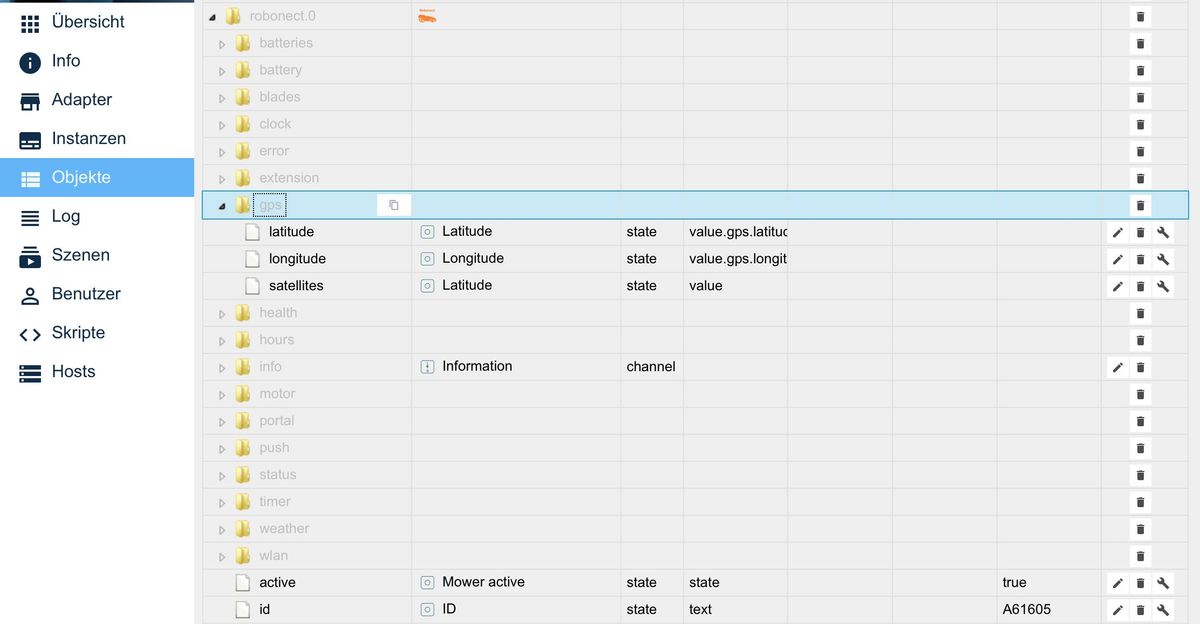
... beim GPS bin ich auf Mithilfe angewiesen
:cry: ich (genau genommen mein Mäher) hab leider auch kein GPS verbaut :cry:
Ich hab nen Automower 420 mit GPS. Wie kann ich dir helfen? Im ioBroker werden die GPS Daten nicht eingetragen. In der Robonect WebUI schon.
Gruß
Sweatchuck -
Ich hab nen Automower 420 mit GPS. Wie kann ich dir helfen? Im ioBroker werden die GPS Daten nicht eingetragen. In der Robonect WebUI schon.
Gruß
Sweatchuck@Sweatchuck Mein Mähroboter hat kein GPS, so dass ich die Abfrage nicht selber testen konnte. Gucken wir mal, wie wir das Problem lokalisieren können.
- Welche Version hast Du installiert?
- Nutzt Du das latest oder das stable Repository?
- Hast Du die GPS Abfrage in der Konfiguration aktiviert?
- Kannst Du bitte mal das Log-Level auf debug setzen und das entsprechende Log hier posten?
-
@Sweatchuck Mein Mähroboter hat kein GPS, so dass ich die Abfrage nicht selber testen konnte. Gucken wir mal, wie wir das Problem lokalisieren können.
- Welche Version hast Du installiert?
- Nutzt Du das latest oder das stable Repository?
- Hast Du die GPS Abfrage in der Konfiguration aktiviert?
- Kannst Du bitte mal das Log-Level auf debug setzen und das entsprechende Log hier posten?

- Nutze die Version 1.1.12.
- GPS Abfrage ist als Status konfiguriert
- Log anbei
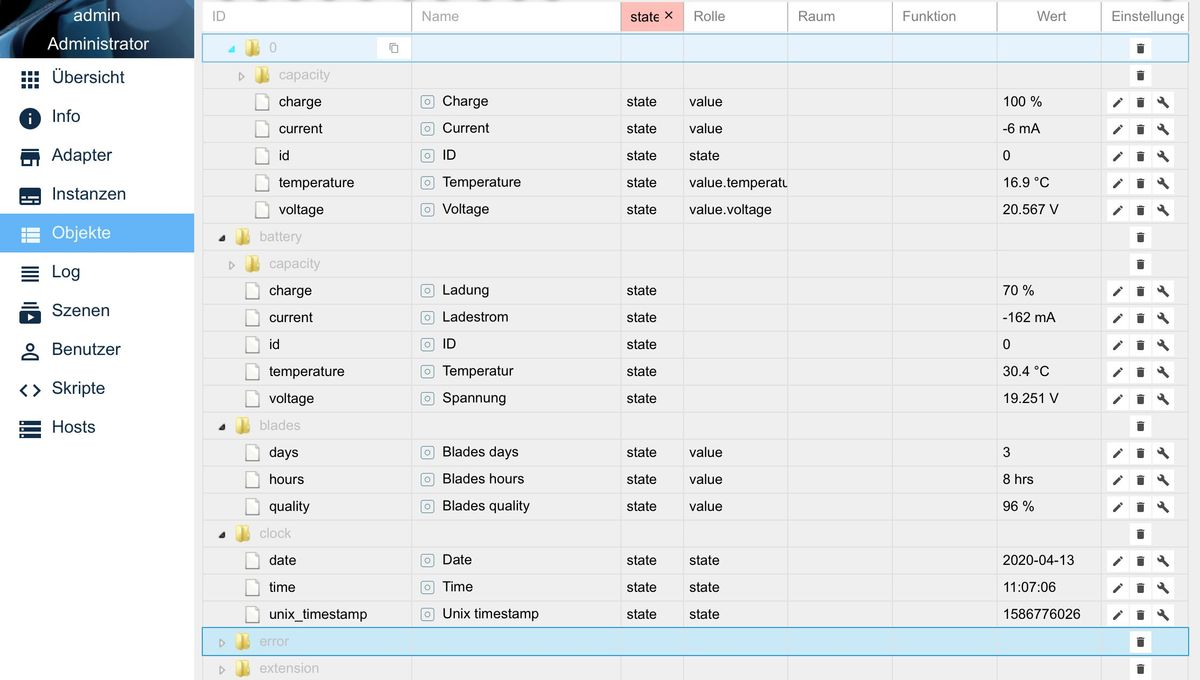
Frage zur Batterie in den Objekten...Wofür sind die zwei unterschiedlichen Batterien?
Hier die Anzeige in der Robonect WebUI

-
- Nutze die Version 1.1.12.
- GPS Abfrage ist als Status konfiguriert
- Log anbei
Frage zur Batterie in den Objekten...Wofür sind die zwei unterschiedlichen Batterien?
Hier die Anzeige in der Robonect WebUI
@Sweatchuck Danke für die Screenshots.
Mal gucken, dass wir das GPS ans Laufen bekommen.
- Kannst Du bitte einmal im Browser folgende URL aufrufen http:<ROBONECT_IP>/json?cmd=gps und posten, was Du für eine Antwort bekommst. <ROBONECT_IP> muss natürlich durch die richtige IP ersetzt werden. ;-)
- Zusätzlich bitte auch einmal prüfen und bestätigen, dass Du Robonect Firmware v1.1b und die ZeroConf v1.4 installiert hast. Beides kannst Du im Robonect Webinterface sehen.
Bzgl. der Batterie Objekte: Hast Du eine ältere Version des Adapters installiert gehabt? In einer alten Firmware und damit in einer alten Adapter Version gab es nur eine Batterie. Anscheinend gibt es mittlerweile Mähroboter, die mehrere Batterien haben und entsprechend gibt Robonect das aus. Am besten löscht Du einmal die Instanz und erstellst eine neue. Danach sollten sich die Objekte neu aufbauen.
-
@Sweatchuck Danke für die Screenshots.
Mal gucken, dass wir das GPS ans Laufen bekommen.
- Kannst Du bitte einmal im Browser folgende URL aufrufen http:<ROBONECT_IP>/json?cmd=gps und posten, was Du für eine Antwort bekommst. <ROBONECT_IP> muss natürlich durch die richtige IP ersetzt werden. ;-)
- Zusätzlich bitte auch einmal prüfen und bestätigen, dass Du Robonect Firmware v1.1b und die ZeroConf v1.4 installiert hast. Beides kannst Du im Robonect Webinterface sehen.
Bzgl. der Batterie Objekte: Hast Du eine ältere Version des Adapters installiert gehabt? In einer alten Firmware und damit in einer alten Adapter Version gab es nur eine Batterie. Anscheinend gibt es mittlerweile Mähroboter, die mehrere Batterien haben und entsprechend gibt Robonect das aus. Am besten löscht Du einmal die Instanz und erstellst eine neue. Danach sollten sich die Objekte neu aufbauen.
@braindead
es gibt eine Beta-Version (v1.2 vom 13.4.2020) von robonect, changelog klngt interessant:Changelog: V1.2: - Fehler behoben, dass der Haken bei "Messererrinnerung einschalten" nicht direkt übernommen wurde, sondern erst nach dem erstmaligen setzen des Wechsels. - Fehler behoben, dass ein Versuch den WLAN-Treiber zu aktualisieren im Fehler 501 am Display endete und entsprechend erfolglos war. - Fehler behoben, dass Einheiten nicht durch ein Leerzeichen vom Zahlenwert getrennt wurde, so wie es die ISO Norm fordert. (z.B. Akku: 10 % statt 10%) - Fehler behoben, dass die Spannung "robonect/health/voltage/ext33" zu häufig per MQTT published wurde. - Fehler behoben, dass die MQTT Verbindung ungewollt unterbrochen wurde, wenn die Netzwerkeinstellungen angepasst wurden. Die Verbindung wurde als "Verbunden" angezeigt, obwohl sie offline war. - Fehler behoben, dass es intern zu einem Husky-Cmd Timeout kam. (ReqTim von 500ms > 1500ms erhöht) - Fehler behoben, dass bei Verbindungen unter Umständen nicht alle Daten empfangen wurden, bis die Verbindung geschlossen wurde. - Fehler behoben, dass die Kommunikation Robonect <> Hauptplatine aus der synchronisation kam (unsolicited messages 253 wurden nicht berücksichtigt) - Fehler behoben, dass Kameras, die nicht auf die richtige Übertragungsrate konfiguriert waren, nicht automatisch erkannt wurden. - API: Kapitel "robonect" zu cmd=version hinzugefügt. Hier erkennt man, ob es sich um ein H30x, Hx, Hx+ oder IO handelt. - Feature-Update: Spriralschnitt für den Gardena City (mit aktueller Firmware) hinzugefügt - Feature-Update: CorridorCut für den Gardena City/Life (mit aktueller Firmware) hinzugefügt - Feature-Update: FrostSensor hinzugefügt (City/Life) - Sonstiges: Unterstützung für Husqvarna Automower 305 (Modell 2020) hinzugefügt - Sonstiges: MSW "550" zur Liste der kompatiblen Automower Firmwareversionen hinzugefügt (Wurde durch Husqvarna 2020 eingeführt) - Sonstiges: HTTP-Server intern überarbeitet, Seitenhandling neu strukturiert - Sonstiges: Fehlerhandling für Torsteuerung hinzugefügt (Mehrfache Verbindungsversuche, Mähbetrieb abbrechen bei Fehler etc.) - Sonstiges: Fehlerhandling für Passagensteuerung hinzugefügt (Mehrfache Verbindungsversuche, Mähbetrieb abbrechen bei Fehler etc.) - Sonstiges: Push / Benachrichtigung, falls es ein Problem bei der Ansteuerung des Garagentors gab - Sonstiges: Push / Benachrichtigung, falls es ein Problem bei der Ansteuerung des Passagenmoduls gab -
@braindead
es gibt eine Beta-Version (v1.2 vom 13.4.2020) von robonect, changelog klngt interessant:Changelog: V1.2: - Fehler behoben, dass der Haken bei "Messererrinnerung einschalten" nicht direkt übernommen wurde, sondern erst nach dem erstmaligen setzen des Wechsels. - Fehler behoben, dass ein Versuch den WLAN-Treiber zu aktualisieren im Fehler 501 am Display endete und entsprechend erfolglos war. - Fehler behoben, dass Einheiten nicht durch ein Leerzeichen vom Zahlenwert getrennt wurde, so wie es die ISO Norm fordert. (z.B. Akku: 10 % statt 10%) - Fehler behoben, dass die Spannung "robonect/health/voltage/ext33" zu häufig per MQTT published wurde. - Fehler behoben, dass die MQTT Verbindung ungewollt unterbrochen wurde, wenn die Netzwerkeinstellungen angepasst wurden. Die Verbindung wurde als "Verbunden" angezeigt, obwohl sie offline war. - Fehler behoben, dass es intern zu einem Husky-Cmd Timeout kam. (ReqTim von 500ms > 1500ms erhöht) - Fehler behoben, dass bei Verbindungen unter Umständen nicht alle Daten empfangen wurden, bis die Verbindung geschlossen wurde. - Fehler behoben, dass die Kommunikation Robonect <> Hauptplatine aus der synchronisation kam (unsolicited messages 253 wurden nicht berücksichtigt) - Fehler behoben, dass Kameras, die nicht auf die richtige Übertragungsrate konfiguriert waren, nicht automatisch erkannt wurden. - API: Kapitel "robonect" zu cmd=version hinzugefügt. Hier erkennt man, ob es sich um ein H30x, Hx, Hx+ oder IO handelt. - Feature-Update: Spriralschnitt für den Gardena City (mit aktueller Firmware) hinzugefügt - Feature-Update: CorridorCut für den Gardena City/Life (mit aktueller Firmware) hinzugefügt - Feature-Update: FrostSensor hinzugefügt (City/Life) - Sonstiges: Unterstützung für Husqvarna Automower 305 (Modell 2020) hinzugefügt - Sonstiges: MSW "550" zur Liste der kompatiblen Automower Firmwareversionen hinzugefügt (Wurde durch Husqvarna 2020 eingeführt) - Sonstiges: HTTP-Server intern überarbeitet, Seitenhandling neu strukturiert - Sonstiges: Fehlerhandling für Torsteuerung hinzugefügt (Mehrfache Verbindungsversuche, Mähbetrieb abbrechen bei Fehler etc.) - Sonstiges: Fehlerhandling für Passagensteuerung hinzugefügt (Mehrfache Verbindungsversuche, Mähbetrieb abbrechen bei Fehler etc.) - Sonstiges: Push / Benachrichtigung, falls es ein Problem bei der Ansteuerung des Garagentors gab - Sonstiges: Push / Benachrichtigung, falls es ein Problem bei der Ansteuerung des Passagenmoduls gab -
@braindead
es gibt eine Beta-Version (v1.2 vom 13.4.2020) von robonect, changelog klngt interessant:Changelog: V1.2: - Fehler behoben, dass der Haken bei "Messererrinnerung einschalten" nicht direkt übernommen wurde, sondern erst nach dem erstmaligen setzen des Wechsels. - Fehler behoben, dass ein Versuch den WLAN-Treiber zu aktualisieren im Fehler 501 am Display endete und entsprechend erfolglos war. - Fehler behoben, dass Einheiten nicht durch ein Leerzeichen vom Zahlenwert getrennt wurde, so wie es die ISO Norm fordert. (z.B. Akku: 10 % statt 10%) - Fehler behoben, dass die Spannung "robonect/health/voltage/ext33" zu häufig per MQTT published wurde. - Fehler behoben, dass die MQTT Verbindung ungewollt unterbrochen wurde, wenn die Netzwerkeinstellungen angepasst wurden. Die Verbindung wurde als "Verbunden" angezeigt, obwohl sie offline war. - Fehler behoben, dass es intern zu einem Husky-Cmd Timeout kam. (ReqTim von 500ms > 1500ms erhöht) - Fehler behoben, dass bei Verbindungen unter Umständen nicht alle Daten empfangen wurden, bis die Verbindung geschlossen wurde. - Fehler behoben, dass die Kommunikation Robonect <> Hauptplatine aus der synchronisation kam (unsolicited messages 253 wurden nicht berücksichtigt) - Fehler behoben, dass Kameras, die nicht auf die richtige Übertragungsrate konfiguriert waren, nicht automatisch erkannt wurden. - API: Kapitel "robonect" zu cmd=version hinzugefügt. Hier erkennt man, ob es sich um ein H30x, Hx, Hx+ oder IO handelt. - Feature-Update: Spriralschnitt für den Gardena City (mit aktueller Firmware) hinzugefügt - Feature-Update: CorridorCut für den Gardena City/Life (mit aktueller Firmware) hinzugefügt - Feature-Update: FrostSensor hinzugefügt (City/Life) - Sonstiges: Unterstützung für Husqvarna Automower 305 (Modell 2020) hinzugefügt - Sonstiges: MSW "550" zur Liste der kompatiblen Automower Firmwareversionen hinzugefügt (Wurde durch Husqvarna 2020 eingeführt) - Sonstiges: HTTP-Server intern überarbeitet, Seitenhandling neu strukturiert - Sonstiges: Fehlerhandling für Torsteuerung hinzugefügt (Mehrfache Verbindungsversuche, Mähbetrieb abbrechen bei Fehler etc.) - Sonstiges: Fehlerhandling für Passagensteuerung hinzugefügt (Mehrfache Verbindungsversuche, Mähbetrieb abbrechen bei Fehler etc.) - Sonstiges: Push / Benachrichtigung, falls es ein Problem bei der Ansteuerung des Garagentors gab - Sonstiges: Push / Benachrichtigung, falls es ein Problem bei der Ansteuerung des Passagenmoduls gab@Latzi Einen Tag vorher hatte ich mal wieder danach geschaut :)
Ich habe aktuell immer wieder mal WLAN Probleme mit meinem Robo - werde morgen nochmal das WLAN im Garten durchmessen - für eine sehr gute Ausleuchtung hatte ich aber gesorgt ... irgendwas ist doch immer :)
-
@Latzi Danke für den Hinweis. Hast Du das Update schon gemacht? Ich werde mein Modul in den nächsten Tagen mal updaten und gucken, ob der Adapter grundsätzlich noch funktioniert.
@braindead sagte in Neuer Robonect HX Adapter:
Hast Du das Update schon gemacht?
Nein, ich hab mich bisher noch nicht getraut ;-) Derzeit läuft alles sehr gut - never change a running system!
-
@Latzi Einen Tag vorher hatte ich mal wieder danach geschaut :)
Ich habe aktuell immer wieder mal WLAN Probleme mit meinem Robo - werde morgen nochmal das WLAN im Garten durchmessen - für eine sehr gute Ausleuchtung hatte ich aber gesorgt ... irgendwas ist doch immer :)
-
@darkiop sagte in Neuer Robonect HX Adapter:
WLAN Probleme mit meinem Robo
das kommt mir sehr bekannt vor ...
@Latzi sagte in Neuer Robonect HX Adapter:
das kommt mir sehr bekannt vor ...
Ich hab da aktuell keine Erklärung für - außer das ich es auf die Firmware/WLAN-Treiber schieben würde. Auf der Terrasse sitzt direkt ein AP der mehr als den Garten ausleuchtet.
Proxmox-ioBroker-Redis-HA Doku: https://forum.iobroker.net/topic/47478/dokumentation-einer-proxmox-iobroker-redis-ha-umgebung
-
@Latzi sagte in Neuer Robonect HX Adapter:
das kommt mir sehr bekannt vor ...
Ich hab da aktuell keine Erklärung für - außer das ich es auf die Firmware/WLAN-Treiber schieben würde. Auf der Terrasse sitzt direkt ein AP der mehr als den Garten ausleuchtet.
@darkiop sagte in Neuer Robonect HX Adapter:
Ich hab da aktuell keine Erklärung für - außer das ich es auf die Firmware/WLAN-Treiber schieben würde. Auf der Terrasse sitzt direkt ein AP der mehr als den Garten ausleuchtet.
vermute ich auch, ich bekomme 2-3 mal am Tag Verbindungsabbrüche (kurzzeitig, innerhalb der nächsten Minute ist wieder alles gut), obwohl der Mähroboter in der Dockingstation steht ????
-
@Latzi Danke für den Hinweis. Hast Du das Update schon gemacht? Ich werde mein Modul in den nächsten Tagen mal updaten und gucken, ob der Adapter grundsätzlich noch funktioniert.
@braindead
Kch habe das Firmware-Update gestern installiert. Der Adapter läuft. Es sind keine Fehler im Log oder sonstige Auffälligkeiten aufgetreten.Gruß Marco
260
Online32.7k
Users82.5k
Topics1.3m
Posts