

Neuer Robonect HX Adapter
-
@Latzi und @Damian411 Freut mich, dass es bei Euch jetzt funktioniert. :-)
@apollon77 Danke für Deine Hilfe.

-
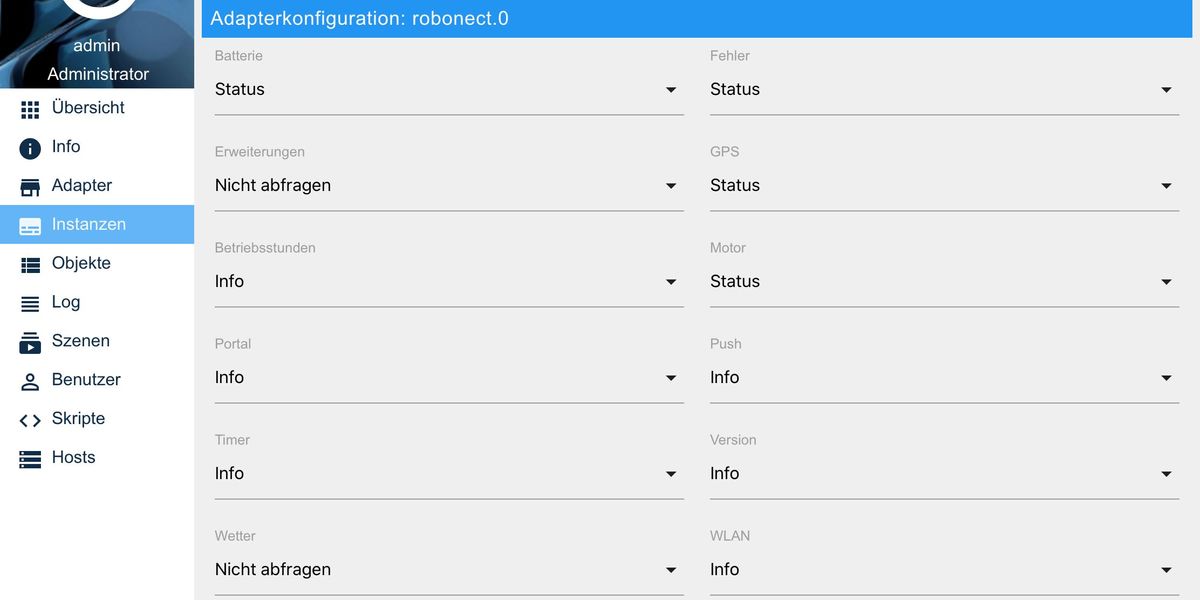
Ich habe vorhin Version 0.0.11 auf GitHub veröffentlicht. Neben ein paar kleineren Änderungen, werden jetzt Wetterinformationen und die GPS Position abgefragt. Das Wetter kann ich mit meinem Mähroboter selber testen (in Robonect muss die Wetter Abfrage konfiguriert sein), beim GPS bin ich auf Mithilfe angewiesen, weil mein Mäher kein GPS hat.
Der Adapter kann direkt aus GitHub aktualisiert werden. Alternativ sollte morgen oder in den nächsten Tagen die Version 0.0.11 automatisch im latest Repository erscheinen.
-
Ich habe vorhin Version 0.0.11 auf GitHub veröffentlicht. Neben ein paar kleineren Änderungen, werden jetzt Wetterinformationen und die GPS Position abgefragt. Das Wetter kann ich mit meinem Mähroboter selber testen (in Robonect muss die Wetter Abfrage konfiguriert sein), beim GPS bin ich auf Mithilfe angewiesen, weil mein Mäher kein GPS hat.
Der Adapter kann direkt aus GitHub aktualisiert werden. Alternativ sollte morgen oder in den nächsten Tagen die Version 0.0.11 automatisch im latest Repository erscheinen.
@braindead sagte in Neuer Robonect HX Adapter:
... beim GPS bin ich auf Mithilfe angewiesen
 ich (genau genommen mein Mäher) hab leider auch kein GPS verbaut
ich (genau genommen mein Mäher) hab leider auch kein GPS verbaut -
Hallo @braindead ad,
erstmal Danke für den tollen Adapter!Ich hab bei meinem RI40 auch das Problem mit dem Piepen. Der Nachbar hat irgendwann auch mal was gesagt, allerdings stört mich es mehr :)
Bist du noch daran eine automatische Deaktivierung des Adapters einzubauen?
Dann würde ich den Adapter immer automatisch ausschalten lassen und nur für die eingestellte Mähzeit anschalten lassen.Wäre wirklich toll
Danke dir für einen Einsatz -
Hallo @braindead ad,
erstmal Danke für den tollen Adapter!Ich hab bei meinem RI40 auch das Problem mit dem Piepen. Der Nachbar hat irgendwann auch mal was gesagt, allerdings stört mich es mehr :)
Bist du noch daran eine automatische Deaktivierung des Adapters einzubauen?
Dann würde ich den Adapter immer automatisch ausschalten lassen und nur für die eingestellte Mähzeit anschalten lassen.Wäre wirklich toll
Danke dir für einen Einsatz -
@darkiop sagte in Neuer Robonect HX Adapter:
@stephan2k https://forum.iobroker.net/topic/11834/neuer-robonect-hx-adapter/143
Hatte ich gesehen Danke
In den Adapter Settings selbst wärs etwas komfortabler :) Drum die Frage. Aber danke für dein Code, werde den solang mal testen -
@darkiop sagte in Neuer Robonect HX Adapter:
@stephan2k https://forum.iobroker.net/topic/11834/neuer-robonect-hx-adapter/143
Hatte ich gesehen Danke
In den Adapter Settings selbst wärs etwas komfortabler :) Drum die Frage. Aber danke für dein Code, werde den solang mal testen@stephan2k sagte in Neuer Robonect HX Adapter:
komfortabler
Das kommt drauf an, das Skript in Summe ist für meine komplette Steuerung sehr wichtig geworden - zumindest wenn man auf ein sauberes Log und in gewisser Weise auch Stabiltät achtet: Ich schalte alles ab was nicht verfügbar ist. Das ist alles Zentral in diesem Skript.
-
@darkiop und @stephan2k Da Ruhezeiten anscheinend für einige User wichtig sind, habe ich sie heute in den Adaper eingebaut.
Der Adapter bietet die Möglichkeit zwei Ruhezeiten zu definieren. Gedacht ist das für Mittags (z.B. 12:00 - 15:00) und Nachts (z.B. 22:00 - 08:00), es gehen aber natürlich beliebige Zeiten. Wenn die Felder leer bleiben, gibt es auch keine Ruhezeiten und die Abfragen laufen entsprechend durch.
Auch in den Ruhezeiten wird die API Abfrage /json?cmd=status jedes mal gemacht. Information, die so abgefragt werden kommen aus dem Speicher. Der Mähroboter wird nicht geweckt und piept demnach auch nicht. Hintergrund ist, dass man so zumindest die wichtigsten Infos im ioBroker hat. Alle anderen Abfragen, die als Status oder Info konfiguriert wurden, laufen in den Ruhezeiten nicht.
Könnt Ihr den Adapter bitte von GitHub installieren und testen, ob er so funktioniert, wie Ihr Euch das vorstellt? Wenn ich positive Rückmeldung von Euch habe, gebe ich die Version für das latest Repository frei.
-
Vielen Dank @braindead .
Habe leider gestern bei Gartenarbeiten aus versehen das Kabel durchgeschnitten :D
Muss daher erst warten bis Amazon meine Lieferung bringt. Werde es dann gleich testenDanke!
-
@darkiop und @stephan2k Da Ruhezeiten anscheinend für einige User wichtig sind, habe ich sie heute in den Adaper eingebaut.
Der Adapter bietet die Möglichkeit zwei Ruhezeiten zu definieren. Gedacht ist das für Mittags (z.B. 12:00 - 15:00) und Nachts (z.B. 22:00 - 08:00), es gehen aber natürlich beliebige Zeiten. Wenn die Felder leer bleiben, gibt es auch keine Ruhezeiten und die Abfragen laufen entsprechend durch.
Auch in den Ruhezeiten wird die API Abfrage /json?cmd=status jedes mal gemacht. Information, die so abgefragt werden kommen aus dem Speicher. Der Mähroboter wird nicht geweckt und piept demnach auch nicht. Hintergrund ist, dass man so zumindest die wichtigsten Infos im ioBroker hat. Alle anderen Abfragen, die als Status oder Info konfiguriert wurden, laufen in den Ruhezeiten nicht.
Könnt Ihr den Adapter bitte von GitHub installieren und testen, ob er so funktioniert, wie Ihr Euch das vorstellt? Wenn ich positive Rückmeldung von Euch habe, gebe ich die Version für das latest Repository frei.
@braindead Hab ihn installiert, erster Test sieht gut aus. Melde mich falls was auffällt.
Proxmox-ioBroker-Redis-HA Doku: https://forum.iobroker.net/topic/47478/dokumentation-einer-proxmox-iobroker-redis-ha-umgebung
-
@braindead kann es sein, dass bei den Motorgeschwindigkeiten robonect.0.motor.drive.left.speed und robonect.0.motor.drive.right.speed die Einheit mm/s anstatt der angezeigten cm/s sein sollte?
-
@braindead Hab ihn installiert, erster Test sieht gut aus. Melde mich falls was auffällt.
-
@Latzi Im Robonect Web Interface wird die Einheit cm/s benutzt. Ich habe aber ehrlich gesagt nicht überprüft,ob die Werte im Interace umgewandelt werden in cm/s. Wie kommst Du darauf, dass die Einheit nicht stimmt?
-
@braindead
bei mir wird im Web Interface z.B. ein wert von 13,1 cm/s angezeigt, im DP aber 131 cm/s -
@darkiop Sind Dir in Deinen Tests Probleme aufgefallen? Falls nicht, würde ich die Änderung gerne in das latest Repository übernehmen und den Adapter anschließend als Version 1.0 im stable Repository veröffentlichen wollen.
@braindead sagte in Neuer Robonect HX Adapter:
Sind Dir in Deinen Tests Probleme aufgefallen? Falls nicht, würde ich die Änderung gerne in das latest Repository übernehmen und den Adapter anschließend als Version 1.0 im stable Repository veröffentlichen wollen.
Nein, passt soweit - dolly dreht ihre Runden aktuell :)
-
@braindead sagte in Neuer Robonect HX Adapter:
... beim GPS bin ich auf Mithilfe angewiesen
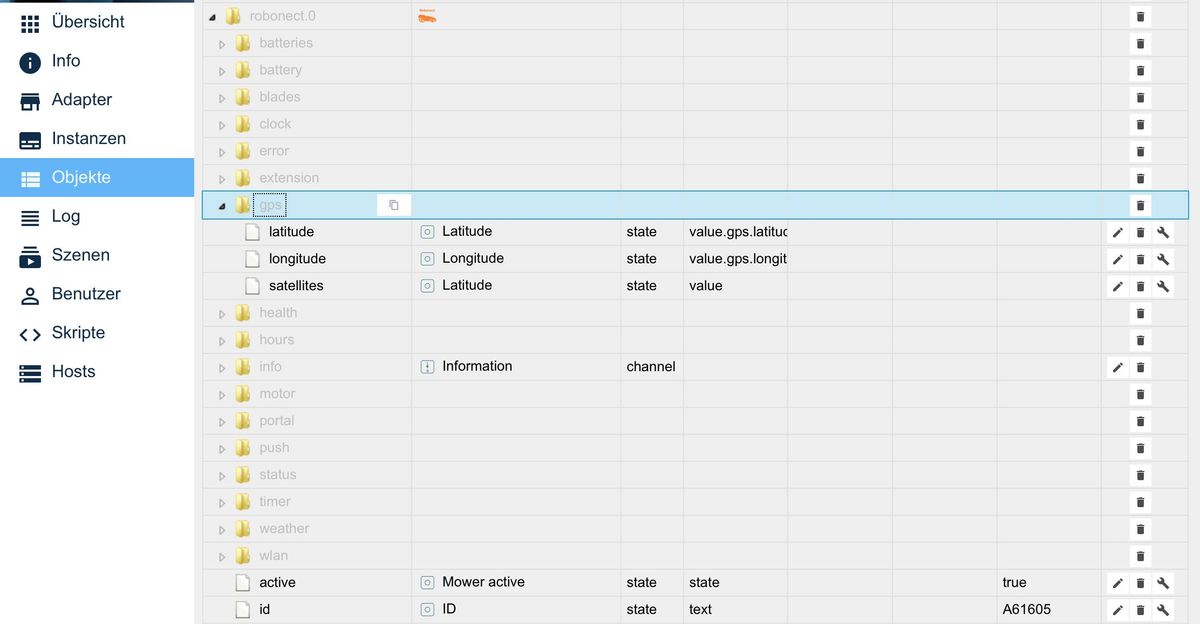
ich (genau genommen mein Mäher) hab leider auch kein GPS verbaut Ich hab nen Automower 420 mit GPS. Wie kann ich dir helfen? Im ioBroker werden die GPS Daten nicht eingetragen. In der Robonect WebUI schon.
Gruß
Sweatchuck -
Ich hab nen Automower 420 mit GPS. Wie kann ich dir helfen? Im ioBroker werden die GPS Daten nicht eingetragen. In der Robonect WebUI schon.
Gruß
Sweatchuck@Sweatchuck Mein Mähroboter hat kein GPS, so dass ich die Abfrage nicht selber testen konnte. Gucken wir mal, wie wir das Problem lokalisieren können.
- Welche Version hast Du installiert?
- Nutzt Du das latest oder das stable Repository?
- Hast Du die GPS Abfrage in der Konfiguration aktiviert?
- Kannst Du bitte mal das Log-Level auf debug setzen und das entsprechende Log hier posten?
-
@Sweatchuck Mein Mähroboter hat kein GPS, so dass ich die Abfrage nicht selber testen konnte. Gucken wir mal, wie wir das Problem lokalisieren können.
- Welche Version hast Du installiert?
- Nutzt Du das latest oder das stable Repository?
- Hast Du die GPS Abfrage in der Konfiguration aktiviert?
- Kannst Du bitte mal das Log-Level auf debug setzen und das entsprechende Log hier posten?

- Nutze die Version 1.1.12.
- GPS Abfrage ist als Status konfiguriert
- Log anbei
Frage zur Batterie in den Objekten...Wofür sind die zwei unterschiedlichen Batterien?
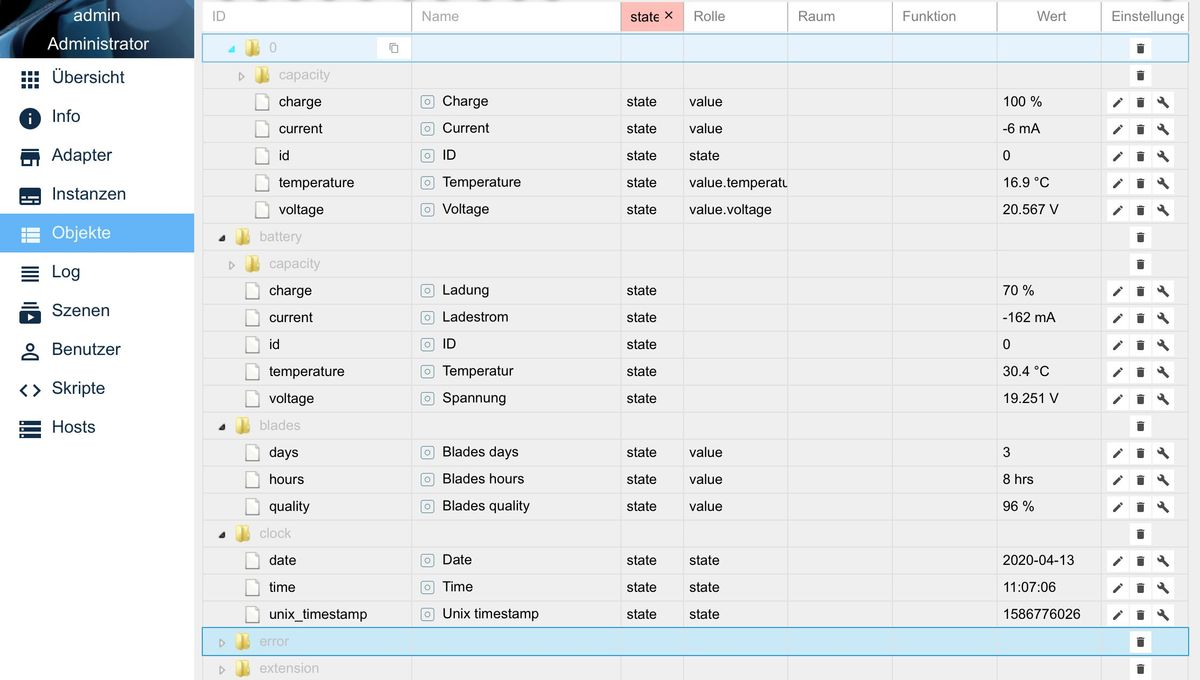
Hier die Anzeige in der Robonect WebUI

Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden458
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge