Test Adapter canbus v1.1.x Latest
-
@cb187 schade, wäre ja auch zu einfach gewesen

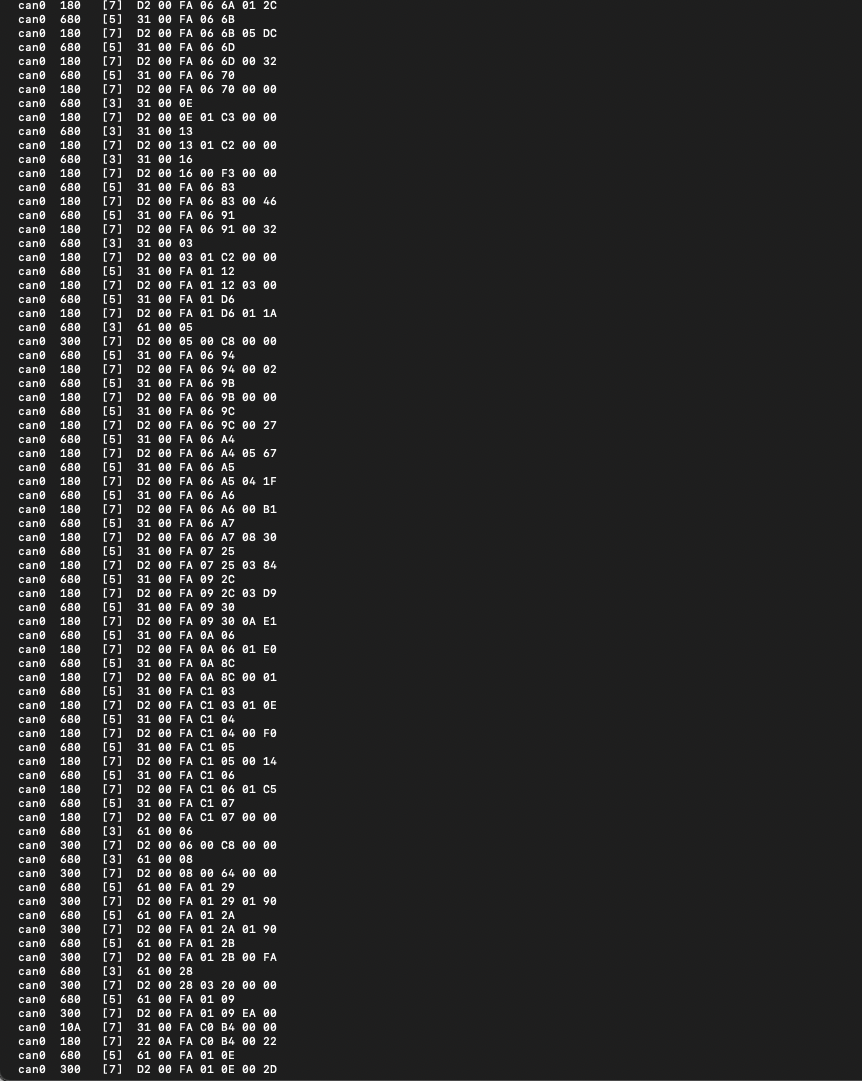
Kannst du die Werte dann mal über die originale Steuerung anpassen und dabei einencandumpmitlaufen lassen? Der Dump und dazu die von dir eingestellten genauen Werte wäre interessant. -
weiß nicht ob ich es erwischt habe
-
@cb187 wenn ich das richtig sehe, dann sind in dem Dump nur die Abfragen vom Adapter drin und nichts von der originalen Steuerung.
-
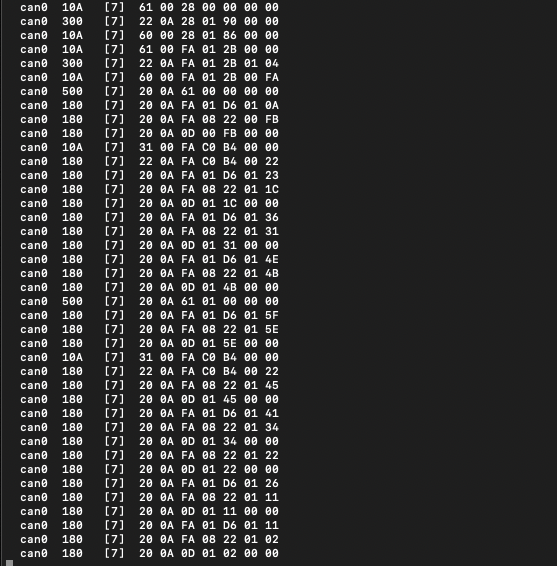
jetzt aber hab mal den can adapter ausgemacht.
-
@cb187 Versuchs mal damit: canbus-messages-t-vl-set.json
Vor dem Import musst du die beiden "T Vorlauf * setzen" Parser löschen, damit die dann neu angelegt werden. -
TMAx funktioniert die abfrage und setzen, tmin funktioniert nur die abfrage nicht das setzen
-
@cb187 Hab noch einen Fehler gefunden. Damit sollte es jetzt aber klappen: canbus-messages-t-vl-set.json
Wieder vor dem Import zumindest den Parser "T Vorlauf Min setzen" löschen. -
@crycode jetzt taucht tmin nicht auf:-)
-
@crycode hab aber im code ne Zahl verändert jetzt gehts
-
@cb187 sagte in Test Adapter canbus v1.1.x Latest:
hab aber im code ne Zahl verändert
Und was genau hast du geändert?
")
Dann kann ich das in die vordefinierte Config auf GitHub übernehmen. -
@crycode deine datei konnte ich komischerweise nicht laden, hab dann deine binärzahlen verglichen und bei der alten version war eine zahl falsch.Deine letzte version ist also richtig.
-
Kann dir gerne meine jetzige liste schicken.
-
@cb187 Alles klar, danke!
Hab jetzt auf GitHub die Config 1.3.0 für die Rotex HPSU mit den zwei zusätzlichen Punkten veröffentlicht. -
Meine Rotex ist noch über einen eigenen Pi, auf dem FHEM läuft, angebunden.
Allerdings wäre es schon klasse alles auf einem System zu haben.
Mein Problem ist allerdings, dass der Pi auf dem ioBroker läuft, gute 10m von der Rotex entfernt ist, und ich auch da nichts ändern kann.Frage, hat jemand schon mal mit einem so langen CAN-Kabel gearbeitet? Verdrillt ist klar, aber evtl. auch noch geschirmt?
Welche Masse anschließen, die der Rotex oder vom CAN-Adapter?
Gibt es da Erfahrungswerte? -
@hg6806 Das hängt auch etwas von der verwendeten Baudrate ab, aber 10 m sind für einen CAN-Bus eigentlich gar nichts.
Bei 1 Mbit/s sind allgemein Kabellängen bis etwa 25m möglich. Bei 10 kbit/s sind es sogar über 6 km.Geschirmtes Kabel würde ich immer für (längere) Busleitungen empfehlen.
Ich selbst habe bei mir aktuell eine Busleitungslänge von rund 120 m bei einer Baudrate von 500 kbit/s mit Cat7 Verlegekabel. Die Masse habe ich dabei über den Kabelschirm bei allen Busteilnehmern verbunden. Läuft seit über 2 Jahren ohne Probleme.
-
@crycode
Ich weiß dass es eigentlich kein Problem sein sollte, allerdings hatte ich bei 40cm Kabel schon ein Problem, allerdings ohne Verdrillung.
Zumindest bei dem FHEM System und dem ELM327 Adapter, den ich ja weiterverwenden möchte.Kann man die Baudrate einstellen?
Wenn du wirklich die Masse bei beiden angeschlossen hast, würde ich eher ein Problem beim Potentialausgleich sehen. Da würde ich min. auf einer Seite einen Kondensator in Reihe schalten.
-
@hg6806 Verdrillte Leitungen machen hier schon einen großen Unterschied.
Die Baudrate ist in deine Fall ja durch die Rotex vorgegeben.
Der ELM327 ist mit dem canbus Adapter so nicht direkt kompatibel. Der Adapter benötigt ein vom Linux-Kernel unterstütztes CAN-Interface, welches dann z.B. als
can0im System bekannt ist.
Es gibt im Netz aber für SocketCAN Treiber für den ELM 327. Inwieweit die funktionieren kann ich jedoch nicht sagen.Eine recht einfache Alternative wäre ein CAN Hat mit MCP2515 Controller für den Raspi.
-
OK, dann besorge ich mir erst einmal ein CAN-HAT und Kabel.
Ich hatte mir LiYCY 2x0,25mm2 rausgesucht. -
-
Hallo crycode
Vielen Dank für den Adapter. Zurzeit suche ich die Möglichkeit die Daten einer NMEA 2000 Schnittstelle in den iobroker und das in die Objekte zu bringen. Bevor ich mich nun in Unkosten stürze
 möchte ich dich fragen wie Du die Chancen siehst, dass ich das zum laufen bringe. Schlussendlich ist das Ziel die NMEA Daten zu visualisieren mit dem VIS um alles auf einem iPad anzuzeigen bzw. zu steuern.
möchte ich dich fragen wie Du die Chancen siehst, dass ich das zum laufen bringe. Schlussendlich ist das Ziel die NMEA Daten zu visualisieren mit dem VIS um alles auf einem iPad anzuzeigen bzw. zu steuern.Je nach deiner Meinung würde ich dann eine Versuchsanlage aufbauen; bestehend aus:
Nach meiner Recherche im Netz dürfte die NMEA Schnittstelle ein CAN BUS sein und somit müssten die Daten bzw. die Objekte in den iobroker übernommen werden.
https://de.wikipedia.org/wiki/NMEA_2000
https://seabits.com/nmea-2000-powered-raspberry-pi/Vielen Dank für deine Meinung. Hoffe ich kann das realisieren.
Gruss