

Test Adapter Navimow



-
Hallo,
von mir ein kurzes Feedback:
Installiert und hat auf Anhieb funktioniert, start/stop und die Werte kann ich auch abfragen:Danke für den Adapter!
Wo seht ihr denn den MQTT Fehler?
Die Positionsdaten (nicht die GPS-Daten!) stehen ja als DP ebenfalls zur Verfügung (postureX, postureY) (was bedeutet denn "postureTheta?).
Dazu meine Frage: Hat schon jemand ans den Positionsdaten eine Art "Livekarte" gebastelt um zu sehen, wo sich der Roboter im Garten gerade bewegt?
Das fände ich eine nette Option im Iobroker Dashboard dann ... -
 H Homoran verschob dieses Thema von Tester am
H Homoran verschob dieses Thema von Tester am
-
Hallo,
von mir ein kurzes Feedback:
Installiert und hat auf Anhieb funktioniert, start/stop und die Werte kann ich auch abfragen:Danke für den Adapter!
Wo seht ihr denn den MQTT Fehler?
Die Positionsdaten (nicht die GPS-Daten!) stehen ja als DP ebenfalls zur Verfügung (postureX, postureY) (was bedeutet denn "postureTheta?).
Dazu meine Frage: Hat schon jemand ans den Positionsdaten eine Art "Livekarte" gebastelt um zu sehen, wo sich der Roboter im Garten gerade bewegt?
Das fände ich eine nette Option im Iobroker Dashboard dann ... -
Ob da was kommt weiß ich nicht.
Wenn da was geplant ist wäre eine kurze Info gut, dann könnte ich aufhören, mir selbst was zu "basteln" ;-)
Siehe: https://forum.iobroker.net/topic/84448/position-von-mähroboter-in-einem-bild-anzeigen-lassen -
Hallo, kommt auch noch eine VIS Visualisierung wegen der map? Locations sind drin und werden aktualisiert. Hat es jemand umgesetzt?
Zudem fände ich es praktisch, in der VIS auszuwählen, welche Fläche gemäht werden soll, geht das schon?Hallo, kommt auch noch eine VIS Visualisierung wegen der map? Locations sind drin und werden aktualisiert. Hat es jemand umgesetzt?
Zudem fände ich es praktisch, in der VIS auszuwählen, welche Fläche gemäht werden soll, geht das schon?War in Kontakt mit Tombox, er hat es in der aktuellen Version umgesetzt!
Danke Tom!Hinweis:
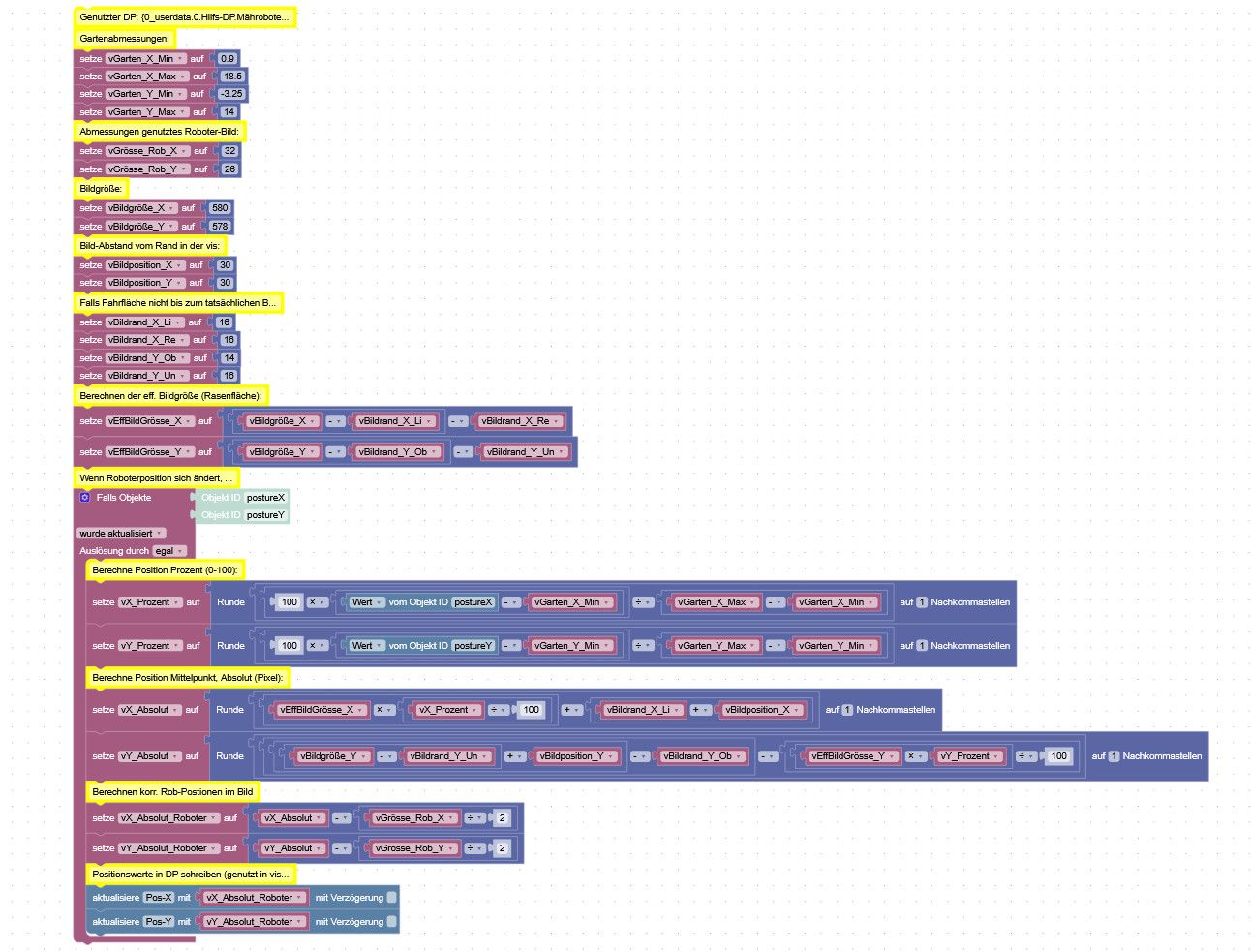
Es wird "nur" der Fahrweg im DP "Map" codiert gespeichert, keine hinterlegte Gesamtkarte!Mein Blockly-Script zur Auswertung der Posture-X und Posture-Y Datenpunkte ist jetzt zeitgleich fertig geworden ;-)
So sieht es aus, wenn man den neuen "DP: Map" einbindet:
(habe es über ein HTML-Basic-Widget gemacht: <img src="{navimow.0.2SGAxxxxxxx75.map}" style="width: 100%; height: auto;" />
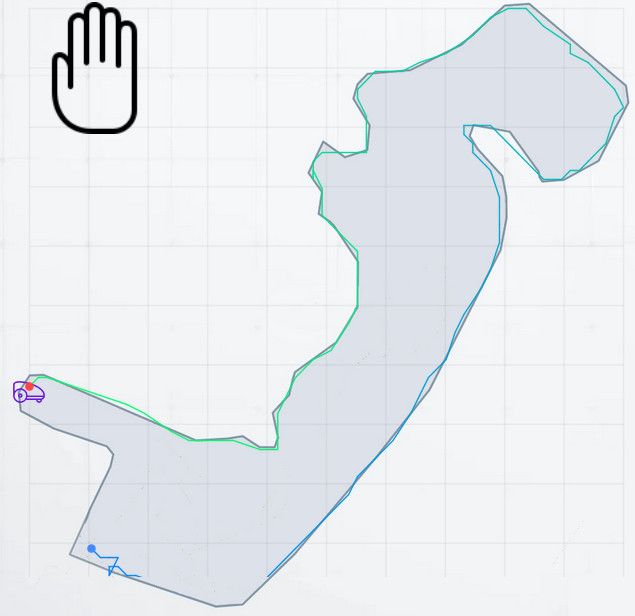
(der Kartenumriss ist ein hinterlegtes Bild, das Mähroboter-Icon links kommt von meinem Blockly)
-
Cool, willst du dein blockly dazu teilen?
Das könnte man vielleicht auch als Beispiel in der Dok hinzufügen -
Vielen Dank. Ich werde es ausprobieren, jedoch lässt sich der code nicht anzeigen, der Link tut nicht.
Kannst du ihn hier einfügen?
-
Kann man dort auch festlegen, in welcher Reihenfolge er die Zonen mähen soll?
-
Nein, das funktioniert bisher nur über die App.
Es hat aber noch einige Datenpunkte, die bei besserem Verständnis der Werte sicherlich zu besserer Visualisierung und Steuerung beitragen können. Dazu reichen meine Kenntnisse aber nicht.Hab das Blockly zum laufen gebracht, aber der Adapter aktualisiert manchmal einfach nicht mehr die Position. Ich denke es liegt wahrscheinlich am WLAN Emfang, der manchmal weg ist.
-
Hallo,
gibt es die Option, diesen "haken" beim Start über den Adapter auch zu setzen, so dass er den Mähvorgang komplett ausführt und nicht den zuvor abgebrochenen fortsetzt ?
Oder welches Objekt (DP) muss ich mit welchem Wert belegen um das zu erreichen?
Und:
Ich sehe die Wochenmähleistung als DP (mowingWeekArea), aber nicht die gesamte Mähfläche und auch nicht die monatliche.
Seht ihr die Gesamt- und Monatsmähfläche? In der App sind diese Wert ja da. -
Hallo,
gibt es die Option, diesen "haken" beim Start über den Adapter auch zu setzen, so dass er den Mähvorgang komplett ausführt und nicht den zuvor abgebrochenen fortsetzt ?
Oder welches Objekt (DP) muss ich mit welchem Wert belegen um das zu erreichen?
Und:
Ich sehe die Wochenmähleistung als DP (mowingWeekArea), aber nicht die gesamte Mähfläche und auch nicht die monatliche.
Seht ihr die Gesamt- und Monatsmähfläche? In der App sind diese Wert ja da.@topsurfer Feature wünsche bitte bei navimow direkt https://github.com/segwaynavimow/NavimowHA/issues
-
@topsurfer Feature wünsche bitte bei navimow direkt https://github.com/segwaynavimow/NavimowHA/issues
@topsurfer Feature wünsche bitte bei navimow direkt https://github.com/segwaynavimow/NavimowHA/issues
Ich weiß, einmal versucht und am Ende waren 20 Minuten "Arbeit" weg und war in Github nicht zusehen...
Aber wegen dem "Fortschritt löschen, um "alles" zu mähen,
k.A. ob dies ein Feature-Request ist oder schon geht wenn man DP X auf Y setzt oder ... ? Daher hier.
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
298
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge