

Neuer Robonect HX Adapter
-
Hi, Ich versuche verzweifelt die Timer per VIS (fancyswitch) zu aktivieren und zu deaktivieren. Leider klappt schon das deaktivieren nicht richtig.
Wenn ich mir das Objekt robonect.0.timer.0.enabled anschaue wird das bei betätigen des switch auf false gesetzt, damit hotte ich den timer deaktvieren zu können. Leider wird es nach einiger Zeit jedoch automatisch wieder auf "true" gesetzt. Weshalb ist mir unklar.
Ähnliches passiert wenn ich den robonect.0.status.mode z.B. von Manuell auf "Auto" setze. Das Objekt geht zunächst auf Auto, wechselt aber nach ca 1 Sekunde zurück auf "Manuell".
Hab ich was Generelles übersehen?@aiouh sagte in Neuer Robonect HX Adapter:
robonect.0.timer.0.enabled
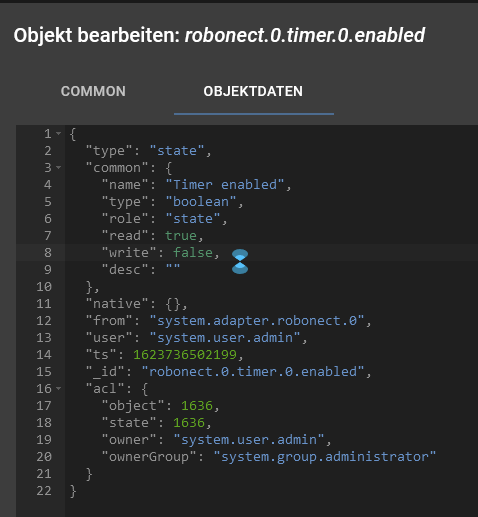
-> Der Adapter kann diese DPs aktuell nicht schreiben / an Robonect senden. Er liest sie nur aus.
-
@aiouh sagte in Neuer Robonect HX Adapter:
robonect.0.timer.0.enabled
-> Der Adapter kann diese DPs aktuell nicht schreiben / an Robonect senden. Er liest sie nur aus.
-
Hallo,
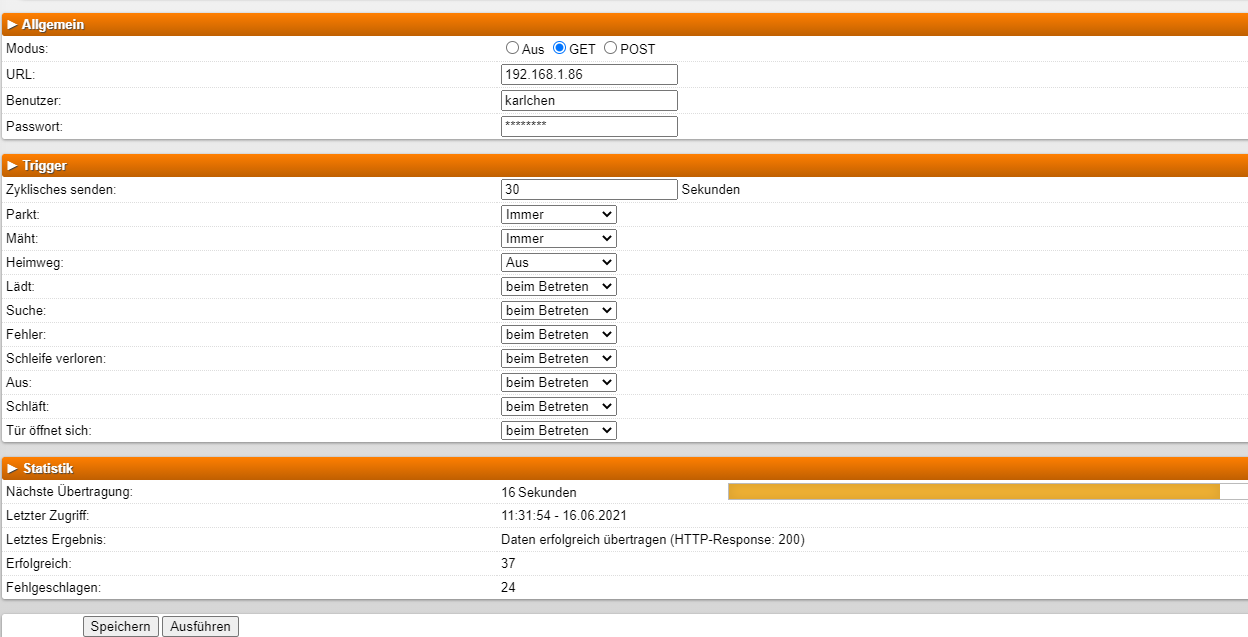
ich bitte um Entschuldigung, wenn ich mich hier mal einklinke. Habe eine Frage zu Robonect. Es gibt dort unter Kommunikation den Punkt Pushservice. Leider ist die Doku dazu recht dürftig. Habe daher versucht, mal einen eigenen Pushserver mit Gotify aufzusetzen. Der läuft jetzt in einer eigenen VM unter Debian.Meine Testconfig für den Pushservice:
Ich kann auch die Meldung sehen, leider wird das in der zugehörigen App nicht angezeigt.
Hat das vielleicht jemand mit einem anderen Pushservice am Laufen?
-
Hallo zusammen, ich würde gernen über ein Skript den Timer von meinem Rasenmäher mit Robonect Modul setzen
Wenn ich die URI im Browser aufrufe klappt es wie gewünscht. Jetzt habe ich ein JS erstellt und bekomme folgenden Fehler.Request error: Error: Parse Error: Expected HTTP/Wer kann mir helfen.
schedule("0 0 4 * * *", function () { var request = require('request'); var sonnenaufgang = "shuttercontrol.0.info.Sunrise"; var sonnenuntergang = "shuttercontrol.0.info.Sunset"; request('http://ip-vom-mäher/xml?cmd=timer&timer=1&start=06:00&end=22:00&enable=1', function (error, response) { }); });@malz1902 sagte in Neuer Robonect HX Adapter:
request('http://ip-vom-mäher/xml?cmd=timer&timer=1&start=06:00&end=22:00&enable=1', function (error, response) { });
Benutzer und Passwort fehlt.
Und zum Schluss fehlt "save"richtig ist:
request('http://192.168.xxx.xx/json?user=xxx&pass=xxx&cmd=timer&timer=1&start=06:00&end=15:00&mo=1&tu=1&enable=1&save=1', function (error, response, body) { if (error) { log('Error: request Fehler!',"error"); } });
Wenn ich helfen konnte, dann Daumen hoch (Pfeil nach oben)!
Danke.
gute Forenbeiträge: https://forum.iobroker.net/topic/51555/hinweise-f%C3%BCr-gute-forenbeitr%C3%A4ge
ScreenToGif :https://www.screentogif.com/downloads.html -
@malz1902 sagte in Neuer Robonect HX Adapter:
request('http://ip-vom-mäher/xml?cmd=timer&timer=1&start=06:00&end=22:00&enable=1', function (error, response) { });
Benutzer und Passwort fehlt.
Und zum Schluss fehlt "save"richtig ist:
request('http://192.168.xxx.xx/json?user=xxx&pass=xxx&cmd=timer&timer=1&start=06:00&end=15:00&mo=1&tu=1&enable=1&save=1', function (error, response, body) { if (error) { log('Error: request Fehler!',"error"); } });@Malz1902
Hättest ja mal schreiben können, dass du dein Problem im robonect forum schon geklärt hast. -
@Malz1902
Hättest ja mal schreiben können, dass du dein Problem im robonect forum schon geklärt hast. -
Hallo,
ich habe meinen ioBroker auf den neuesten Stand gebracht, nun funktioniert der Robonect Adaptr nicht mehr. Keine Verbindung zum Robbi.Kann es sein, dass sich der Adapter mit der neuesten Version (Admin) von iobroker nicht mehr versteht?
Grüße
-
Hallo,
ich habe meinen ioBroker auf den neuesten Stand gebracht, nun funktioniert der Robonect Adaptr nicht mehr. Keine Verbindung zum Robbi.Kann es sein, dass sich der Adapter mit der neuesten Version (Admin) von iobroker nicht mehr versteht?
Grüße
-
Bis zum Winterschlaf Anfang Oktober war alles gut. Ich kann gerne im Frühjahr bescheid geben
@malz1902 sagte in Neuer Robonect HX Adapter:
Bis zum Winterschlaf Anfang Oktober war alles gut
klingt gut! Danke für die Rückmeldung
@sweatchuck sagte in Neuer Robonect HX Adapter:
Kann es sein, dass sich der Adapter mit der neuesten Version (Admin) von iobroker nicht mehr versteht?
@Sweatchuck ist dein Problem gelöst?
-
Moin
Seit ein paar tagen steht im LOG
"No connection to lawn mower. Check network connection."Habe an den Einstellungen nichts geändert.
Die Angaben im Adapter stimmen
und über Netzwerk ist dieser auch erreichbar.Was kann da das Problem sein ?
BZW. Hat noch jemand anders das Problem ?? -
-
@bjoerg hatte ein ähnliches Problem. Bei mir lag es daran, dass die Fritzbox dem Robonect Adapter nach der langen Winterpause eine neue IP Adresse vergeben hat. Hatte den Haken in der Fritzbox bei " immer dieselbe Adresse vergeben' vergessen.
Habe das nicht gleich gefunden weil der Adapter Status trotz der falschen IP drei mal auf grün stand. Neue Adresse eingetragen und jetzt tuckert wieder alles. -
@bjoerg hatte ein ähnliches Problem. Bei mir lag es daran, dass die Fritzbox dem Robonect Adapter nach der langen Winterpause eine neue IP Adresse vergeben hat. Hatte den Haken in der Fritzbox bei " immer dieselbe Adresse vergeben' vergessen.
Habe das nicht gleich gefunden weil der Adapter Status trotz der falschen IP drei mal auf grün stand. Neue Adresse eingetragen und jetzt tuckert wieder alles. -
Moin
Seit ein paar tagen steht im LOG
"No connection to lawn mower. Check network connection."Habe an den Einstellungen nichts geändert.
Die Angaben im Adapter stimmen
und über Netzwerk ist dieser auch erreichbar.Was kann da das Problem sein ?
BZW. Hat noch jemand anders das Problem ??@bjoerg
Ich kann den Fehler bei mir bestätigen.
Seit kurzem erhalte ich diesen auch. Muss durch ein Update des iobroker gekommen sein. Ich weis aber nicht mehr welches.Habe bereits den Adapter deinstalliert, alles in Objekte gelöscht und neu angelegt.
Verbindung zum Robomäher geht nicht mehr.
Gleiches Netzwerk, gleiches WLAN, Webinterface ist problemlos erreichbar. Passwort habe ich auch mal geändert auf nur Zahlen.Leider kein Erfolg mehr mit der Verbindung.
-
Ich bekomme immer diese Info Meldung im Log.
State value to set for "robonect.0.gps.longitude" has to be type "number" but received type "string" State value to set for "robonect.0.gps.latitude" has to be type "number" but received type "string"im objekt ist aber number hinterlegt
"type": "state", "common": { "name": "Latitude", "type": "number", "role": "value.gps.latitude", "read": true, "write": false, "desc": "" }, "native": {}, "from": "system.adapter.robonect.0", "user": "system.user.admin", "ts": 1665841293081, "_id": "robonect.0.gps.latitude", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }kann ich diese info irgendwie selber weg bekommen oder muss das der adapter entwickler machen?
-
@bjoerg
Ich kann den Fehler bei mir bestätigen.
Seit kurzem erhalte ich diesen auch. Muss durch ein Update des iobroker gekommen sein. Ich weis aber nicht mehr welches.Habe bereits den Adapter deinstalliert, alles in Objekte gelöscht und neu angelegt.
Verbindung zum Robomäher geht nicht mehr.
Gleiches Netzwerk, gleiches WLAN, Webinterface ist problemlos erreichbar. Passwort habe ich auch mal geändert auf nur Zahlen.Leider kein Erfolg mehr mit der Verbindung.
@severendis Guten Morgen, gibt es eine Lösung zu dem Problem?
Mich hat es auch getroffen. Nach einer vermutlich unbewussten Aktion funktioniert der Zugriff auf den Mäher nicht mehr. Wie hier schon beschrieben, bringen Neuinstallation und einfache bzw. keine Kennwörter keine Besserung.Was wäre denn eine Alternative? Lässt sich mit IoBroker das JSON über die URL abfragen und die Werte daraus speichern?
-
@severendis Guten Morgen, gibt es eine Lösung zu dem Problem?
Mich hat es auch getroffen. Nach einer vermutlich unbewussten Aktion funktioniert der Zugriff auf den Mäher nicht mehr. Wie hier schon beschrieben, bringen Neuinstallation und einfache bzw. keine Kennwörter keine Besserung.Was wäre denn eine Alternative? Lässt sich mit IoBroker das JSON über die URL abfragen und die Werte daraus speichern?
@kreuzundkwer sagte in Neuer Robonect HX Adapter:
Lässt sich mit IoBroker das JSON über die URL abfragen und die Werte daraus speichern?
ja, das geht natürlich.
// Mähroboter // Werte holen ------------------------------------------------------------------------------------------------------------------------ function weiter() { var request = require('request'); request('http://192.168.xxx.xxx/json?user=xxx&pass=xxx&cmd=status', function (error, response, body) { if (!error && response.statusCode == 200) { log ("json = " + body); var obj = JSON.parse(body); var v_status = obj.status.status; if (v_status === 1) setState('javascript.0.Geräte.Mähroboter.Status', 'parkt'); if (v_status === 2) setState('javascript.0.Geräte.Mähroboter.Status', 'mäht'); if (v_status === 3) setState('javascript.0.Geräte.Mähroboter.Status', 'sucht die Ladestation'); if (v_status === 4) setState('javascript.0.Geräte.Mähroboter.Status', 'lädt'); if (v_status === 5) setState('javascript.0.Geräte.Mähroboter.Status', 'wartet auf Umsetzen im manuellen Modus'); if (v_status === 7) { setState('javascript.0.Geräte.Mähroboter.Status', 'Fehlerstatus'); log("Auslöser: Der Mähroboter hat Error !"); sendTo('telegram.0', { user: "Dieter", text: "Achtung, Achtung! \nDer Mähroboter hat Error.", parse_mode: 'HTML' }); } if (v_status === 8) setState('javascript.0.Geräte.Mähroboter.Status', 'Schleifensignal verloren'); if (v_status === 16) setState('javascript.0.Geräte.Mähroboter.Status', 'abgeschaltet'); if (v_status === 17) setState('javascript.0.Geräte.Mähroboter.Status', 'schläft'); setState('javascript.0.Geräte.Mähroboter.Duration', obj.status.duration); var v_mode = obj.status.mode; if (v_mode === 0) setState('javascript.0.Geräte.Mähroboter.Mode', 'Auto'); if (v_mode === 1) setState('javascript.0.Geräte.Mähroboter.Mode', 'manuell'); if (v_mode === 2) setState('javascript.0.Geräte.Mähroboter.Mode', 'Home'); if (v_mode === 3) setState('javascript.0.Geräte.Mähroboter.Mode', 'Demo'); setState('javascript.0.Geräte.Mähroboter.Battery', obj.status.battery); setState('javascript.0.Geräte.Mähroboter.Hours', obj.status.hours); setState('javascript.0.Geräte.Mähroboter.Messer', obj.blades.quality); setState('javascript.0.Geräte.Mähroboter.Wlan', obj.wlan.signal); setState('javascript.0.Geräte.Mähroboter.Temperatur', obj.health.temperature); setState('javascript.0.Geräte.Mähroboter.Luftfeuchtigkeit', obj.health.humidity); var v_timer_status = obj.timer.status; if (v_timer_status === 0) setState('javascript.0.Geräte.Mähroboter.Timer.Status', 'Deaktiviert'); if (v_timer_status === 1) setState('javascript.0.Geräte.Mähroboter.Timer.Status', 'Aktiv'); if (v_timer_status === 2) setState('javascript.0.Geräte.Mähroboter.Timer.Status', 'Standby'); if (obj.timer.next) { setState('javascript.0.Geräte.Mähroboter.Timer.next_date', obj.timer.next.date.substr(8,2) + "." + obj.timer.next.date.substr(5,2) + "."); setState('javascript.0.Geräte.Mähroboter.Timer.next_time', obj.timer.next.time.substr(0,obj.timer.next.time.length-3)); } else { log ('Timer.next: date und time nicht gesetzt - Diese Werte sind im json nicht vorhanden.'); setState('javascript.0.Geräte.Mähroboter.Timer.next_date', ''); setState('javascript.0.Geräte.Mähroboter.Timer.next_time', ''); } } else { log("Error = " + error); } }); } // alle 2 Minuten ------------------------------------------------------------------------------------------------------------------------ schedule("*/2 * * * *", function () { weiter(); // Werte holen }); -
Ich bekomme immer diese Info Meldung im Log.
State value to set for "robonect.0.gps.longitude" has to be type "number" but received type "string" State value to set for "robonect.0.gps.latitude" has to be type "number" but received type "string"im objekt ist aber number hinterlegt
"type": "state", "common": { "name": "Latitude", "type": "number", "role": "value.gps.latitude", "read": true, "write": false, "desc": "" }, "native": {}, "from": "system.adapter.robonect.0", "user": "system.user.admin", "ts": 1665841293081, "_id": "robonect.0.gps.latitude", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }kann ich diese info irgendwie selber weg bekommen oder muss das der adapter entwickler machen?
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden458
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge