

Neuer Robonect HX Adapter
-
Bevor der Adapter die Abfragen startet, schickt er einen Ping an den Mäher. Bekommt er keine Antwort, dann erscheint die Meldung "No connection to lawn mower" im Log. Bekommt er hingegen eine Antwort, dann schickt er nacheinander die Abfragen los. Hat Dein Mäher zwischenzeitlich kein WLAN mehr, kommt es zu den beschriebenen Fehlern.
Ich habe dazu einen GitHub Issue aufgemacht und werde mir das angucken.
@braindead Vielen Dank erst mal! Dummerweise habe ich nicht die vorangegangenen Meldungen geschickt. Ich habe oben den Log korrigiert. Manchmal bekomme ich aber auch die folgenden Meldungen:
2020-08-03 17:10:30.993 - info: host.usv Restart adapter system.adapter.robonect.0 because enabled 2020-08-03 17:11:01.075 - info: host.usv instance system.adapter.robonect.0 started with pid 9916 2020-08-03 17:11:03.113 - warn: robonect.0 (9916) Rest period 1 configured (20:00 - 08:00). Only API call /json?cmd=status will be done. 2020-08-03 17:11:14.296 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.367 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.403 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.431 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.470 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.532 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.563 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.590 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:13:10.002 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:13:10.011 - error: Unhandled promise rejection. This error originated either by throwing inside of an async function without a catch block, or by rejecting a promise which was not handled with .catch(). 2020-08-03 17:13:10.013 - error: robonect.0 (9916) unhandled promise rejection: Cannot read property 'status' of undefined 2020-08-03 17:13:10.016 - error: robonect.0 (9916) TypeError: Cannot read property 'status' of undefined at Robonect. (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) at processTicksAndRejections (internal/process/task_queues.js:97:5) 2020-08-03 17:13:10.609 - info: host.usv instance system.adapter.robonect.0 terminated with code 0 (NO_ERROR) 2020-08-03 17:13:10.614 - info: host.usv Restart adapter system.adapter.robonect.0 because enabled -
@braindead Vielen Dank erst mal! Dummerweise habe ich nicht die vorangegangenen Meldungen geschickt. Ich habe oben den Log korrigiert. Manchmal bekomme ich aber auch die folgenden Meldungen:
2020-08-03 17:10:30.993 - info: host.usv Restart adapter system.adapter.robonect.0 because enabled 2020-08-03 17:11:01.075 - info: host.usv instance system.adapter.robonect.0 started with pid 9916 2020-08-03 17:11:03.113 - warn: robonect.0 (9916) Rest period 1 configured (20:00 - 08:00). Only API call /json?cmd=status will be done. 2020-08-03 17:11:14.296 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.367 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.403 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.431 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.470 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.532 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.563 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:11:14.590 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:13:10.002 - error: robonect.0 (9916) Error: Error: socket hang up 2020-08-03 17:13:10.011 - error: Unhandled promise rejection. This error originated either by throwing inside of an async function without a catch block, or by rejecting a promise which was not handled with .catch(). 2020-08-03 17:13:10.013 - error: robonect.0 (9916) unhandled promise rejection: Cannot read property 'status' of undefined 2020-08-03 17:13:10.016 - error: robonect.0 (9916) TypeError: Cannot read property 'status' of undefined at Robonect. (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) at processTicksAndRejections (internal/process/task_queues.js:97:5) 2020-08-03 17:13:10.609 - info: host.usv instance system.adapter.robonect.0 terminated with code 0 (NO_ERROR) 2020-08-03 17:13:10.614 - info: host.usv Restart adapter system.adapter.robonect.0 because enabled -
@darkiop sagte in Neuer Robonect HX Adapter:
@stephan2k https://forum.iobroker.net/topic/11834/neuer-robonect-hx-adapter/143
Hatte ich gesehen Danke
In den Adapter Settings selbst wärs etwas komfortabler :) Drum die Frage. Aber danke für dein Code, werde den solang mal testenHallo, ich habe mit Begeisterung mein Robonect im AM310installiert. Läuft auf Anhieb. (Firmware 1.2)
Leider bekomme ich den Robonect NICHT verbunden obwohl das ja nicht DIE Herausforderung sein sollte :(. Benutzername / Kennwort schon mehrfach geprüft.robonect.0 2020-08-16 10:17:26.482 info (17809) starting. Version 0.1.3 in /opt/iobroker/node_modules/iobroker.robonect, node: v10.19.0, js-controller: 3.1.6 robonect.0 2020-08-16 10:16:52.074 info (17786) Terminated (NO_ERROR): Without reason robonect.0 2020-08-16 10:16:52.073 info (17786) terminating robonect.0 2020-08-16 10:16:52.006 info (17786) cleaned everything up... robonect.0 2020-08-16 10:16:52.005 error at process._tickCallback (internal/process/next_tick.js:68:7) robonect.0 2020-08-16 10:16:52.005 error at Robonect.<anonymous> (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) robonect.0 2020-08-16 10:16:52.005 error (17786) TypeError: Cannot read property 'status' of undefined robonect.0 2020-08-16 10:16:52.005 error (17786) unhandled promise rejection: Cannot read property 'status' of undefined robonect.0 2020-08-16 10:16:51.986 error (17786) Error: Error: getaddrinfo ENOTFOUND top top:80 robonect.0 2020-08-16 10:16:51.862 info (17786) Done robonect.0 2020-08-16 10:16:27.466 warn (17786) Rest period 2 configured (11:30 - 14:00). Only API call /json?cmd=status will be done. robonect.0 2020-08-16 10:16:27.460 warn (17786) Rest period 1 configured (21:00 - 06:00). Only API call /json?cmd=status will be done. robonect.0 2020-08-16 10:16:27.365 info (17786) starting. Version 0.1.3 in /opt/iobroker/node_modules/iobroker.robonect, node: v10.19.0, js-controller: 3.1.6Beim MQTT Adapter klappt alles problemlos, nur liefert der noch zu wenig Werte..
Wo kann ich suchen, was mach ich falsch ? Bin für Hilfe dankbar.
-
Hallo, ich habe mit Begeisterung mein Robonect im AM310installiert. Läuft auf Anhieb. (Firmware 1.2)
Leider bekomme ich den Robonect NICHT verbunden obwohl das ja nicht DIE Herausforderung sein sollte :(. Benutzername / Kennwort schon mehrfach geprüft.robonect.0 2020-08-16 10:17:26.482 info (17809) starting. Version 0.1.3 in /opt/iobroker/node_modules/iobroker.robonect, node: v10.19.0, js-controller: 3.1.6 robonect.0 2020-08-16 10:16:52.074 info (17786) Terminated (NO_ERROR): Without reason robonect.0 2020-08-16 10:16:52.073 info (17786) terminating robonect.0 2020-08-16 10:16:52.006 info (17786) cleaned everything up... robonect.0 2020-08-16 10:16:52.005 error at process._tickCallback (internal/process/next_tick.js:68:7) robonect.0 2020-08-16 10:16:52.005 error at Robonect.<anonymous> (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) robonect.0 2020-08-16 10:16:52.005 error (17786) TypeError: Cannot read property 'status' of undefined robonect.0 2020-08-16 10:16:52.005 error (17786) unhandled promise rejection: Cannot read property 'status' of undefined robonect.0 2020-08-16 10:16:51.986 error (17786) Error: Error: getaddrinfo ENOTFOUND top top:80 robonect.0 2020-08-16 10:16:51.862 info (17786) Done robonect.0 2020-08-16 10:16:27.466 warn (17786) Rest period 2 configured (11:30 - 14:00). Only API call /json?cmd=status will be done. robonect.0 2020-08-16 10:16:27.460 warn (17786) Rest period 1 configured (21:00 - 06:00). Only API call /json?cmd=status will be done. robonect.0 2020-08-16 10:16:27.365 info (17786) starting. Version 0.1.3 in /opt/iobroker/node_modules/iobroker.robonect, node: v10.19.0, js-controller: 3.1.6Beim MQTT Adapter klappt alles problemlos, nur liefert der noch zu wenig Werte..
Wo kann ich suchen, was mach ich falsch ? Bin für Hilfe dankbar.
-
@Aiouh
getaddrinfo ENOTFOUNDlässt darauf schließen, dass die IP Adresse nicht stimmt. Da darfst hier wirklich nur die IP ohne Protokoll und Port etc. eingeben.@braindead Hi, die IP stimmt und ist ohne port eingetragen
Im debug log steht auch nichts Erhellendes :(
-
Hab meinem Robonect mal ne neue Antenne gegönnt, seid dem keine Timeouts mehr im gleichen Garten, also scheint die Antenne vom Robonect nicht so toll zu sein
-
@Malz1902 Ich hab ja ne gute Verbindung (dank vier verteilter Fritzboxen auf dem Grundstück...). Sowohl zum originalen WebUI als auch MQTT, nur nicht zum Robonect Adapter - der aber eben die Werte liefert die ich brauche.
@braindead Hallo Markus, siehst Du eine Chance mein Problem irgendwie einzukreisen? Ich würde das ja selbst machen wenn ich wüsste wo anpacken. Hab mal mit wireshark ins Protokoll geschaut, da komm ich aber leide auch nicht weiter
-
@braindead Hallo Markus, siehst Du eine Chance mein Problem irgendwie einzukreisen? Ich würde das ja selbst machen wenn ich wüsste wo anpacken. Hab mal mit wireshark ins Protokoll geschaut, da komm ich aber leide auch nicht weiter
-
@Aiouh Hatte das gleiche Problem mit der gleichen Fehlermeldung. Bei mir war der letzte character vom Password ein "#". Nachdem ich das Passwort geändert hatte, funktionierte es.
@hebe01 Du bist der Held ! Bei mit war das # am Anfang. Neues simples Kennwort und Login geht :)
Hat etwas gedauert bis alle Werte da waren, jetzt scheints zu tickern, nur noch ein paar Fehlermeldungen.
(Die zu GPS ist mir klar, da keines verbaut ist)So sieht das Log aus
robonect.0 2020-08-25 12:57:31.928 debug (26637) API call /json?cmd=version done robonect.0 2020-08-25 12:57:31.927 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:57:21.843 debug (26637) API call /json?cmd=version started robonect.0 2020-08-25 12:57:21.833 debug (26637) API call /json?cmd=timer done robonect.0 2020-08-25 12:57:21.568 debug (26637) API call /json?cmd=timer started robonect.0 2020-08-25 12:57:21.568 debug (26637) API call /json?cmd=push done robonect.0 2020-08-25 12:57:21.490 debug (26637) API call /json?cmd=push started robonect.0 2020-08-25 12:57:21.489 debug (26637) API call /json?cmd=portal done robonect.0 2020-08-25 12:57:21.450 debug (26637) API call /json?cmd=portal started robonect.0 2020-08-25 12:57:21.450 debug (26637) API call /json?cmd=motor done robonect.0 2020-08-25 12:57:21.450 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:57:11.412 debug (26637) API call /json?cmd=motor started robonect.0 2020-08-25 12:57:11.412 debug (26637) API call /json?cmd=hour done robonect.0 2020-08-25 12:57:11.411 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:57:11.143 info (26637) Polling done robonect.0 2020-08-25 12:57:11.143 debug (26637) doRegularPoll: false robonect.0 2020-08-25 12:57:11.143 debug (26637) currentStatus: 17 robonect.0 2020-08-25 12:57:11.142 debug (26637) isRestTime: false robonect.0 2020-08-25 12:57:11.142 debug (26637) pollType: Status robonect.0 2020-08-25 12:57:11.142 debug (26637) API call /json?cmd=status done robonect.0 2020-08-25 12:57:11.078 debug (26637) API call /json?cmd=status started robonect.0 2020-08-25 12:57:11.077 debug (26637) Polling started robonect.0 2020-08-25 12:57:01.379 debug (26637) API call /json?cmd=hour started robonect.0 2020-08-25 12:57:01.378 debug (26637) API call /json?cmd=gps done robonect.0 2020-08-25 12:57:01.378 error (26637) Error: No GPS installed robonect.0 2020-08-25 12:57:01.321 debug (26637) API call /json?cmd=gps started robonect.0 2020-08-25 12:57:01.320 debug (26637) API call /json?cmd=ext done robonect.0 2020-08-25 12:57:01.275 debug (26637) API call /json?cmd=ext started robonect.0 2020-08-25 12:57:01.274 debug (26637) API call /json?cmd=error done robonect.0 2020-08-25 12:57:01.274 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:56:51.242 debug (26637) API call /json?cmd=error started robonect.0 2020-08-25 12:56:51.242 debug (26637) API call /json?cmd=battery done robonect.0 2020-08-25 12:56:51.241 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:56:41.193 debug (26637) API call /json?cmd=battery startedanbei noch ein paar simpe GIFs die ich mir für die Anzeige der Stati gebaut habe, vielleicht kanns jemand brauchen.
AM310.zip -
@hebe01 Du bist der Held ! Bei mit war das # am Anfang. Neues simples Kennwort und Login geht :)
Hat etwas gedauert bis alle Werte da waren, jetzt scheints zu tickern, nur noch ein paar Fehlermeldungen.
(Die zu GPS ist mir klar, da keines verbaut ist)So sieht das Log aus
robonect.0 2020-08-25 12:57:31.928 debug (26637) API call /json?cmd=version done robonect.0 2020-08-25 12:57:31.927 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:57:21.843 debug (26637) API call /json?cmd=version started robonect.0 2020-08-25 12:57:21.833 debug (26637) API call /json?cmd=timer done robonect.0 2020-08-25 12:57:21.568 debug (26637) API call /json?cmd=timer started robonect.0 2020-08-25 12:57:21.568 debug (26637) API call /json?cmd=push done robonect.0 2020-08-25 12:57:21.490 debug (26637) API call /json?cmd=push started robonect.0 2020-08-25 12:57:21.489 debug (26637) API call /json?cmd=portal done robonect.0 2020-08-25 12:57:21.450 debug (26637) API call /json?cmd=portal started robonect.0 2020-08-25 12:57:21.450 debug (26637) API call /json?cmd=motor done robonect.0 2020-08-25 12:57:21.450 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:57:11.412 debug (26637) API call /json?cmd=motor started robonect.0 2020-08-25 12:57:11.412 debug (26637) API call /json?cmd=hour done robonect.0 2020-08-25 12:57:11.411 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:57:11.143 info (26637) Polling done robonect.0 2020-08-25 12:57:11.143 debug (26637) doRegularPoll: false robonect.0 2020-08-25 12:57:11.143 debug (26637) currentStatus: 17 robonect.0 2020-08-25 12:57:11.142 debug (26637) isRestTime: false robonect.0 2020-08-25 12:57:11.142 debug (26637) pollType: Status robonect.0 2020-08-25 12:57:11.142 debug (26637) API call /json?cmd=status done robonect.0 2020-08-25 12:57:11.078 debug (26637) API call /json?cmd=status started robonect.0 2020-08-25 12:57:11.077 debug (26637) Polling started robonect.0 2020-08-25 12:57:01.379 debug (26637) API call /json?cmd=hour started robonect.0 2020-08-25 12:57:01.378 debug (26637) API call /json?cmd=gps done robonect.0 2020-08-25 12:57:01.378 error (26637) Error: No GPS installed robonect.0 2020-08-25 12:57:01.321 debug (26637) API call /json?cmd=gps started robonect.0 2020-08-25 12:57:01.320 debug (26637) API call /json?cmd=ext done robonect.0 2020-08-25 12:57:01.275 debug (26637) API call /json?cmd=ext started robonect.0 2020-08-25 12:57:01.274 debug (26637) API call /json?cmd=error done robonect.0 2020-08-25 12:57:01.274 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:56:51.242 debug (26637) API call /json?cmd=error started robonect.0 2020-08-25 12:56:51.242 debug (26637) API call /json?cmd=battery done robonect.0 2020-08-25 12:56:51.241 error (26637) Error: JSON not valid robonect.0 2020-08-25 12:56:41.193 debug (26637) API call /json?cmd=battery startedanbei noch ein paar simpe GIFs die ich mir für die Anzeige der Stati gebaut habe, vielleicht kanns jemand brauchen.
AM310.zip@Aiouh
Welche Adapter Version ist installiert?
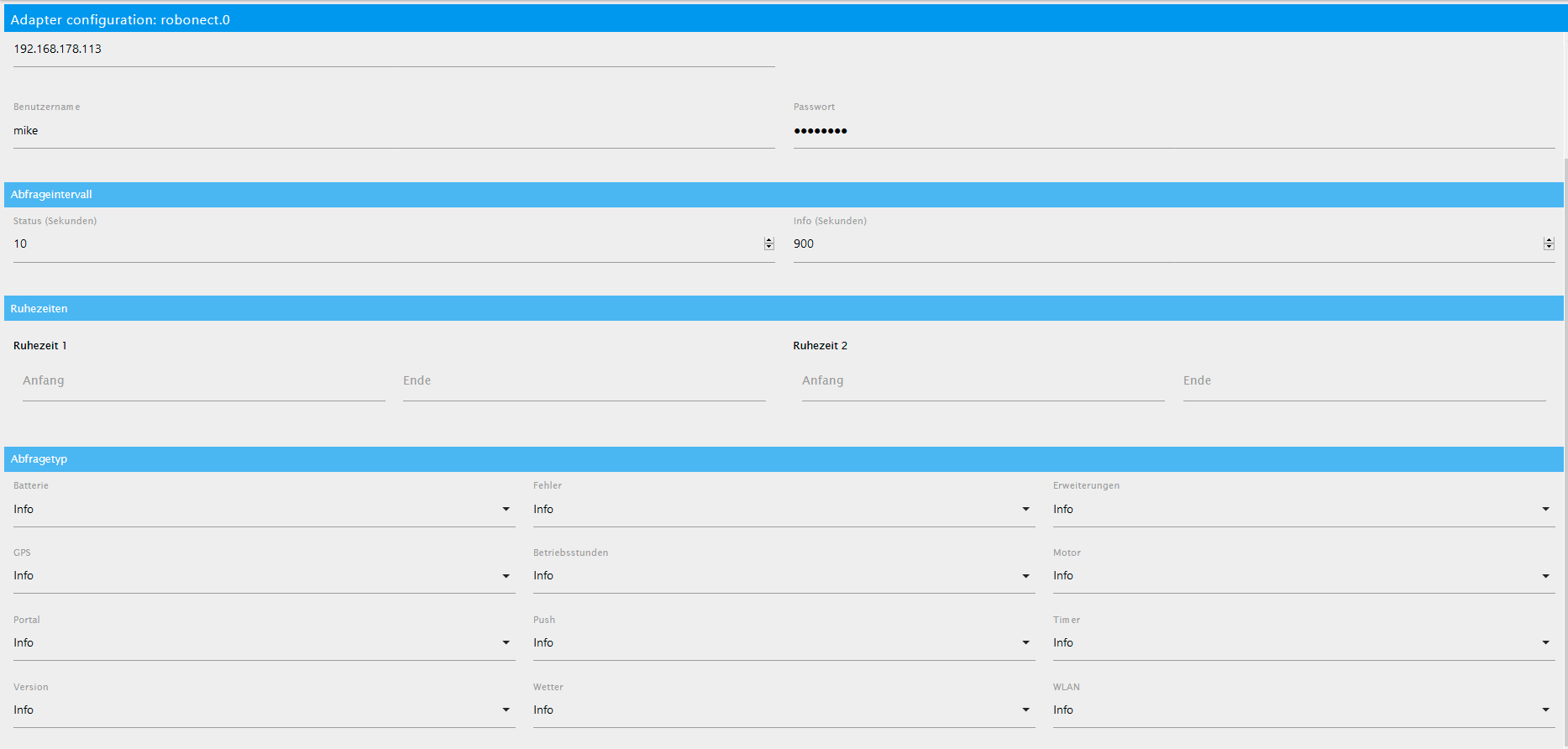
Kannst Du mal bitte einen kompletten Screenshot Deiner Instanz Konfiguration zeigen?
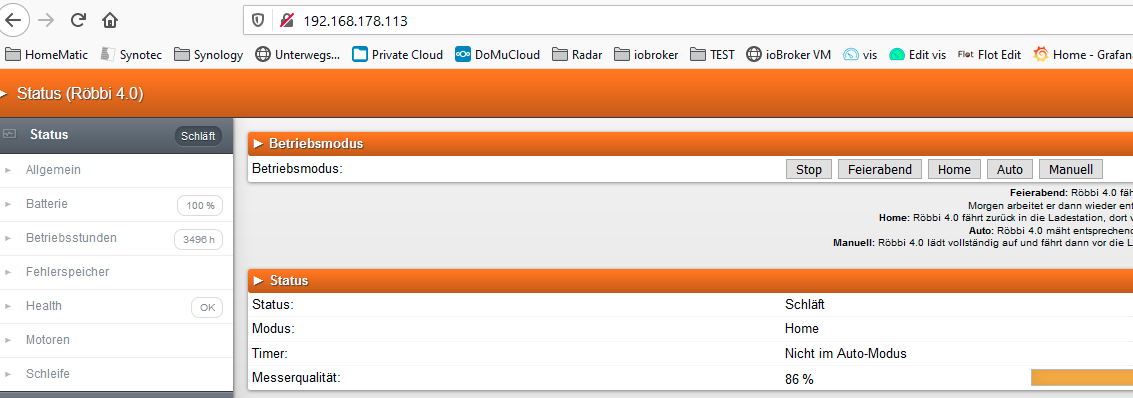
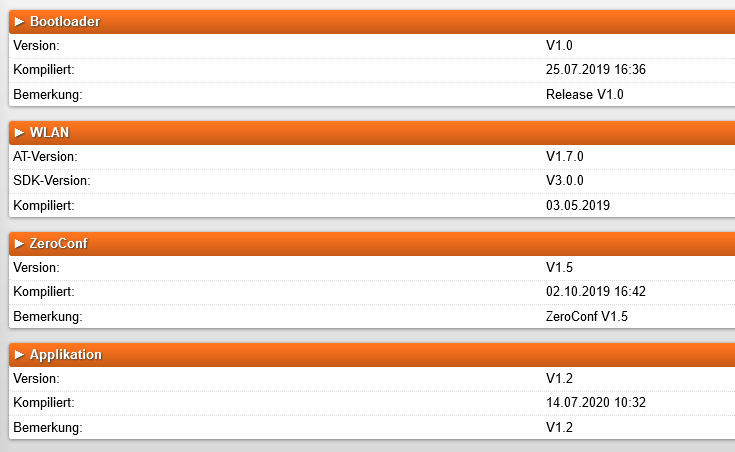
Außerdem bitte einen kompletten Screenshot vom Robonect Webinterface mit den installierten Versionen (Robonect - Firmware Update). -
@Aiouh
Welche Adapter Version ist installiert?
Kannst Du mal bitte einen kompletten Screenshot Deiner Instanz Konfiguration zeigen?
Außerdem bitte einen kompletten Screenshot vom Robonect Webinterface mit den installierten Versionen (Robonect - Firmware Update).@braindead
klar, mach ich gerneAdapterversion ist 0.1.3
kann ich gerade noch die Frage anhängen ob/wie ich den AM auch stoppen und wieder kann?
Du schreibst im help
The mode of the lawn mower can be controlled by changing robonect.0.status.mode. Possible modes are "Auto", "Home", "Manual", "End of day" and "Job" (not fully implemented at the moment)."Wenn ich in den status/mode schaue zeigt er aktuell "Auto(0) an. Wäre das Kommando dann der gesamte string oder nur "Auto" und geht "Stop" auch ?
-
@braindead
klar, mach ich gerneAdapterversion ist 0.1.3
kann ich gerade noch die Frage anhängen ob/wie ich den AM auch stoppen und wieder kann?
Du schreibst im help
The mode of the lawn mower can be controlled by changing robonect.0.status.mode. Possible modes are "Auto", "Home", "Manual", "End of day" and "Job" (not fully implemented at the moment)."Wenn ich in den status/mode schaue zeigt er aktuell "Auto(0) an. Wäre das Kommando dann der gesamte string oder nur "Auto" und geht "Stop" auch ?
@Aiouh sagte in Neuer Robonect HX Adapter:
@braindead
klar, mach ich gerneAdapterversion ist 0.1.3
kann ich gerade noch die Frage anhängen ob/wie ich den AM auch stoppen und wieder kann?
Du schreibst im help
The mode of the lawn mower can be controlled by changing robonect.0.status.mode. Possible modes are "Auto", "Home", "Manual", "End of day" and "Job" (not fully implemented at the moment)."Wenn ich in den status/mode schaue zeigt er aktuell "Auto(0) an. Wäre das Kommando dann der gesamte string oder nur "Auto" und geht "Stop" auch ?
Also bei meinem geht kein "Stop":

Ich setze bei mir den Mode auf "Auto" damit der Mäher gemäß Timer mäht.
Sollte ich ihn abbrechen wollen, setze ich Mode einfach auf "Home". -
@Aiouh sagte in Neuer Robonect HX Adapter:
@braindead
klar, mach ich gerneAdapterversion ist 0.1.3
kann ich gerade noch die Frage anhängen ob/wie ich den AM auch stoppen und wieder kann?
Du schreibst im help
The mode of the lawn mower can be controlled by changing robonect.0.status.mode. Possible modes are "Auto", "Home", "Manual", "End of day" and "Job" (not fully implemented at the moment)."Wenn ich in den status/mode schaue zeigt er aktuell "Auto(0) an. Wäre das Kommando dann der gesamte string oder nur "Auto" und geht "Stop" auch ?
Also bei meinem geht kein "Stop":
Ich setze bei mir den Mode auf "Auto" damit der Mäher gemäß Timer mäht.
Sollte ich ihn abbrechen wollen, setze ich Mode einfach auf "Home".@SchuetzeSchulz said in Neuer Robonect HX Adapter:
Ich setze bei mir den Mode auf "Auto" damit der Mäher gemäß Timer mäht.
Sollte ich ihn abbrechen wollen, setze ich Mode einfach auf "Home".Auch ne gute Idee, das reicht mir ja auch aus

-
@SchuetzeSchulz said in Neuer Robonect HX Adapter:
Ich setze bei mir den Mode auf "Auto" damit der Mäher gemäß Timer mäht.
Sollte ich ihn abbrechen wollen, setze ich Mode einfach auf "Home".Auch ne gute Idee, das reicht mir ja auch aus
-
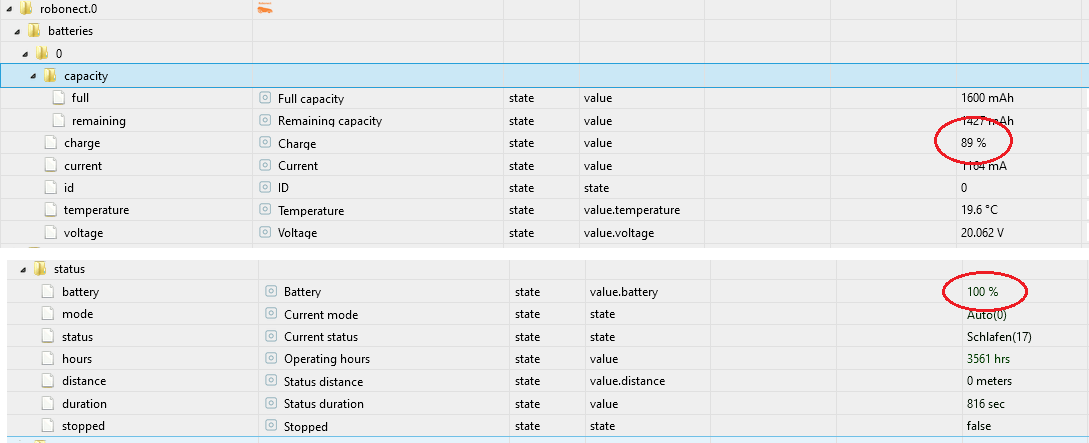
@Aiouh Das Robonect Modul gibt den Akkustand in zwei verschiedenen Abfragen (batteries und status) zurück. Wenn beide Abfragen direkt nacheinander laufen, dann sind die Werte gleich. Da batteries nicht immer läuft, kommt es zu den Abweichungen (siehe Zeitstempel).
-
@Aiouh Das Robonect Modul gibt den Akkustand in zwei verschiedenen Abfragen (batteries und status) zurück. Wenn beide Abfragen direkt nacheinander laufen, dann sind die Werte gleich. Da batteries nicht immer läuft, kommt es zu den Abweichungen (siehe Zeitstempel).
@braindead Danke Dir !
-
@opossum sagte in Neuer Robonect HX Adapter:
würdest Du uns vielleicht den Export zur Verfüging stellen?
sicherlich (Design ist geklaut - nicht meine Kreation)!
Um den Modus und Status als Klartext darstellen zu können, hab ich 2 Datenpunkte angelegt (werden mit folgenden Skripten befüllt), diese lauten bei mir:
-
javascript.0.Status.Flocki.Mode
-
javascript.0.Status.Flocki.Status
Skript für "Mode":
var Mode_akt; on({id: "robonect.0.status.mode", change: "ne"}, function (obj) { var value = obj.state.val; var oldValue = obj.oldState.val; Mode_akt = getState("robonect.0.status.mode").val; if (Mode_akt == 0) { setState("javascript.0.Status.Flocki.Mode", 'Auto', true); } else if (Mode_akt == 1) { setState("javascript.0.Status.Flocki.Mode", 'Manuell', true); } else if (Mode_akt == 2) { setState("javascript.0.Status.Flocki.Mode", 'Home', true); } else if (Mode_akt == 98) { setState("javascript.0.Status.Flocki.Mode", 'End of day', true); } else if (Mode_akt == 99) { setState("javascript.0.Status.Flocki.Mode", 'Job', true); } });Skript für "Status":
var Status_akt; on({id: "robonect.0.status.status", change: "ne"}, function (obj) { var value = obj.state.val; var oldValue = obj.oldState.val; Status_akt = getState("robonect.0.status.status").val; if (Status_akt == 0) { setState("javascript.0.Status.Flocki.Status", 'Unbekannt', true); } else if (Status_akt == 1) { setState("javascript.0.Status.Flocki.Status", 'Parken', true); } else if (Status_akt == 2) { setState("javascript.0.Status.Flocki.Status", 'Mähen', true); } else if (Status_akt == 3) { setState("javascript.0.Status.Flocki.Status", 'Suchen der Ladestation', true); } else if (Status_akt == 4) { setState("javascript.0.Status.Flocki.Status", 'Laden', true); } else if (Status_akt == 5) { setState("javascript.0.Status.Flocki.Status", 'Umsetzen', true); } else if (Status_akt == 7) { setState("javascript.0.Status.Flocki.Status", 'Fehler', true); } else if (Status_akt == 8) { setState("javascript.0.Status.Flocki.Status", 'Schleifensignal verloren', true); } else if (Status_akt == 16) { setState("javascript.0.Status.Flocki.Status", 'Abgeschaltet', true); } else if (Status_akt == 17) { setState("javascript.0.Status.Flocki.Status", 'Schlafen', true); } });Skript für die Mähtage:
var Timer_Tage; schedule('{"time":{"exactTime":true,"start":"18:24"},"period":{"days":1}}', function () { Timer_Tage = ''; if (getState("robonect.0.timer.0.weekdays.monday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Mo'; } else { Timer_Tage += ', Mo'; } } if (getState("robonect.0.timer.0.weekdays.tuesday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Di'; } else { Timer_Tage += ', Di'; } } if (getState("robonect.0.timer.0.weekdays.wednesday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Mi'; } else { Timer_Tage += ', Mi'; } } if (getState("robonect.0.timer.0.weekdays.thursday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Do'; } else { Timer_Tage += ', Do'; } } if (getState("robonect.0.timer.0.weekdays.friday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Fr'; } else { Timer_Tage += ', Fr'; } } if (getState("robonect.0.timer.0.weekdays.saturday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Sa'; } else { Timer_Tage += ', Sa'; } } if (getState("robonect.0.timer.0.weekdays.sunday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'So'; } else { Timer_Tage += ', So'; } } if (Timer_Tage != '') { Timer_Tage += ' von '; Timer_Tage += String(('' + getState("robonect.0.timer.0.start_time").val)); Timer_Tage += ' bis '; Timer_Tage += String(('' + getState("robonect.0.timer.0.end_time").val)); Timer_Tage += ' Uhr'; } setState("javascript.0.Status.Flocki.Tage_Timer"/*Tage_Timer*/, Timer_Tage, true); });Wetterpause & Fehler an telegram senden:
var Flocki_Status_alt, timeout; on({id: "robonect.0.status.status"/*Current status*/, change: "ne"}, function (obj) { var value = obj.state.val; var oldValue = obj.oldState.val; Flocki_Status_alt = getState("robonect.0.status.status").val; if (Flocki_Status_alt == 2 && (getState("javascript.0.Wetterstation.Regen_Tag").val >= 0.5 || getState("javascript.0.Wetterstation.Aussentemperatur").val <= 1)) { // Pause: bisherige Regenmenge > 0,5 l/m² oder Temp < 1°C -> Feierabend setState("robonect.0.status.mode"/*Current mode*/, 98); // -> Feierabend setState("javascript.0.Status.Flocki.Regenpause"/*Regenpause*/, ([formatDate(new Date(), "YYYY.MM.DD"),' ',formatDate(new Date(), "hh:mm:ss")].join('')), true); } else if (Flocki_Status_alt == 7) { // Fehler! Telegram-Nachricht senden timeout = setTimeout(function () { sendTo("telegram", "send", { text: (['Störung bei Flocki !!!','\n','Fehler: ',getState("robonect.0.error.0.message").val,'\n','am ',getState("robonect.0.error.0.date").val,' um ',getState("robonect.0.error.0.time").val,' Uhr!'].join('')) }); }, 120000); } });Und hier noch die View: Robonect_view.txt
WLAN-Empfang: Robonect_WLAN.txt
Fehlermeldungen: Robonect_error.txtmaterialdesign (in allen Varianten die es gibt) sind erforderlich!
Programmierung ist verbesserungswürdig (lerne gerade damit umzugehen) und vis ist eher als quick&dirty zu bezeichnen und noch nicht vollständig, z.B. Fehleranzeige, ... ;-)
Danke für deinen Export!
Leider funktionieren die Skripte Mode und Status bei mir nicht wie Sie sollen.
Die zwei von mir angelegten Datenpunkte "Javascript.0.Status.Robonect.Status + Javascript.0.Status.Robonect.Mode" werden nicht beschrieben. Ist hier eventuell eine Konfig der Datenpunkte notwendig?Die Pfade wurden natürlich in den Skripts geändert (Flocki durch Robonect ersetzt).
-
-
Danke für deinen Export!
Leider funktionieren die Skripte Mode und Status bei mir nicht wie Sie sollen.
Die zwei von mir angelegten Datenpunkte "Javascript.0.Status.Robonect.Status + Javascript.0.Status.Robonect.Mode" werden nicht beschrieben. Ist hier eventuell eine Konfig der Datenpunkte notwendig?Die Pfade wurden natürlich in den Skripts geändert (Flocki durch Robonect ersetzt).
-
@nils50122
hast du die beiden Datenpunkte als Rolle "state" und Art "Zeichenkette" angelegt? Damit funktioniert´s bei mir ohne Probleme.
Tippfehler irgendwo im Skript bei den Datenpunkten?
Fehlermeldung bei ausführen des Skipts?
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden455
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge