Neuer Adapter für Roborock-Staubsauger
-
Die Position am Bild der Karte?
Wenn ja schau mal 2 bzw 3 Posts weiter oben. -
@maxb Hallo nochmal zur Karte.
Dein Blockly habe ich übernommen, jedoch aktualisiert der Datenpunkt ohne erkennbares Muster.
roborock.0.Devices.73IcwgDs3bor4cpoGQz8Oa.map.mapBase64 aktualisiert sich unregelmäßig von alle paar Sekunden bis hin zu alle 10 Minuten. Hast du eine Idee wie ich das in den Griff bekommen könnte?
-
@david-g sagte in Neuer Adapter für Roborock-Staubsauger:
Die Position am Bild der Karte?
Wenn ja schau mal 2 bzw 3 Posts weiter oben. -
@david-g LOL Ok jetzt hab ich es gerafft. Alles klar danke. Manchmal sieht man den Wald vor lauter Bäume nicht
-
Ok noch eine Frage habe ich, gibt es auch de Möglichkeit mehrere Räume auszuwählen zur Reinigung? Würde gerne auf der Vis anwählen Raum 1+2+3 oder 1+3+5 und dann auf start drücken.
-
Die entsprechenden Räume auf true setzen und dann app_segment_clean.
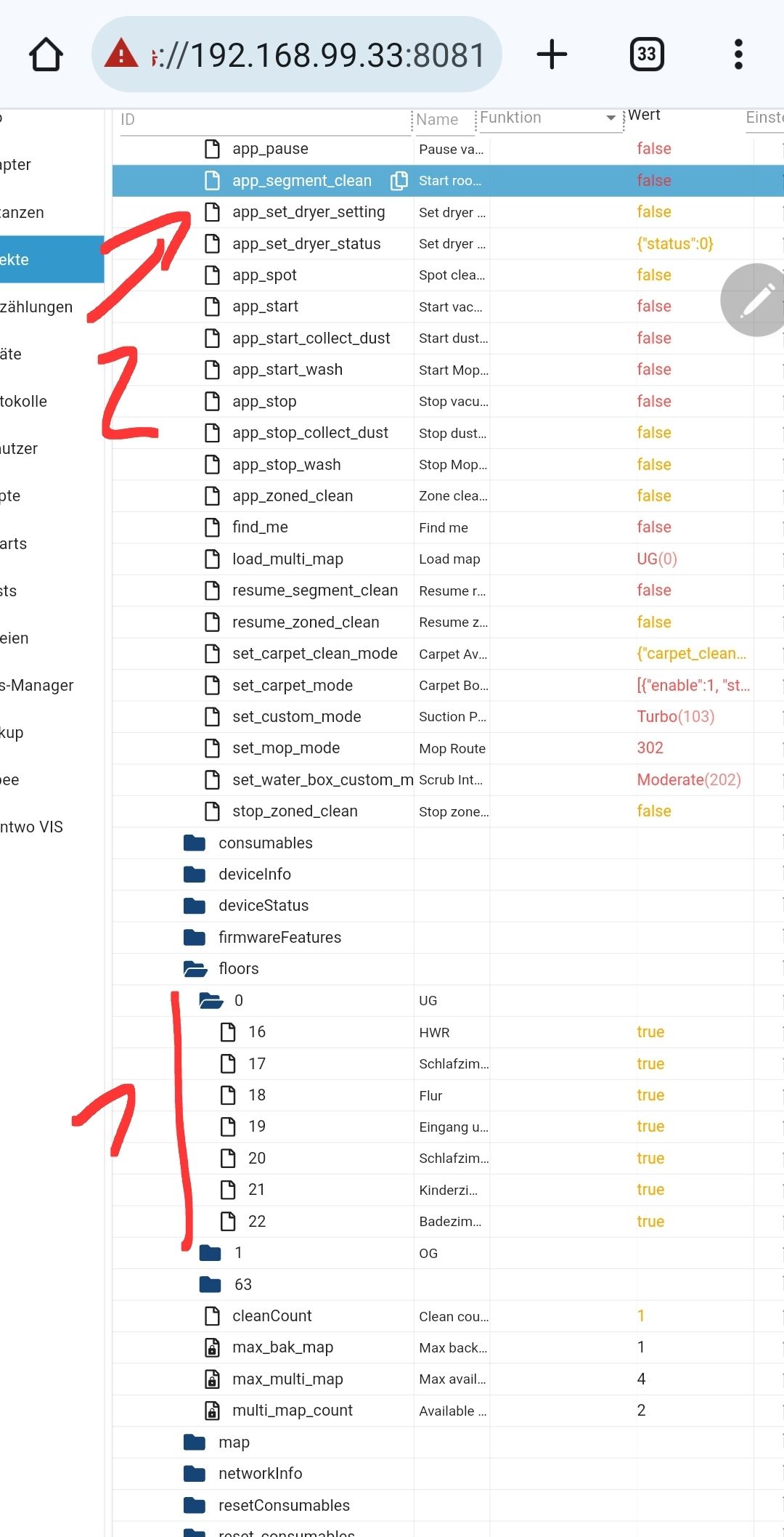
Edit
Falls es mehrere Etagen gibt diese über load_multi_map auswählen. -
@david-g Super dank dir!!!
-
So ich bin dann auch mal fertig mit der integration. Man muss nur den Raum auf der Karte anwählen. Er wird dann heller, start drücken fertig. Einfach Geil!
Design wird noch aufgehübscht
Danke für den Adapter.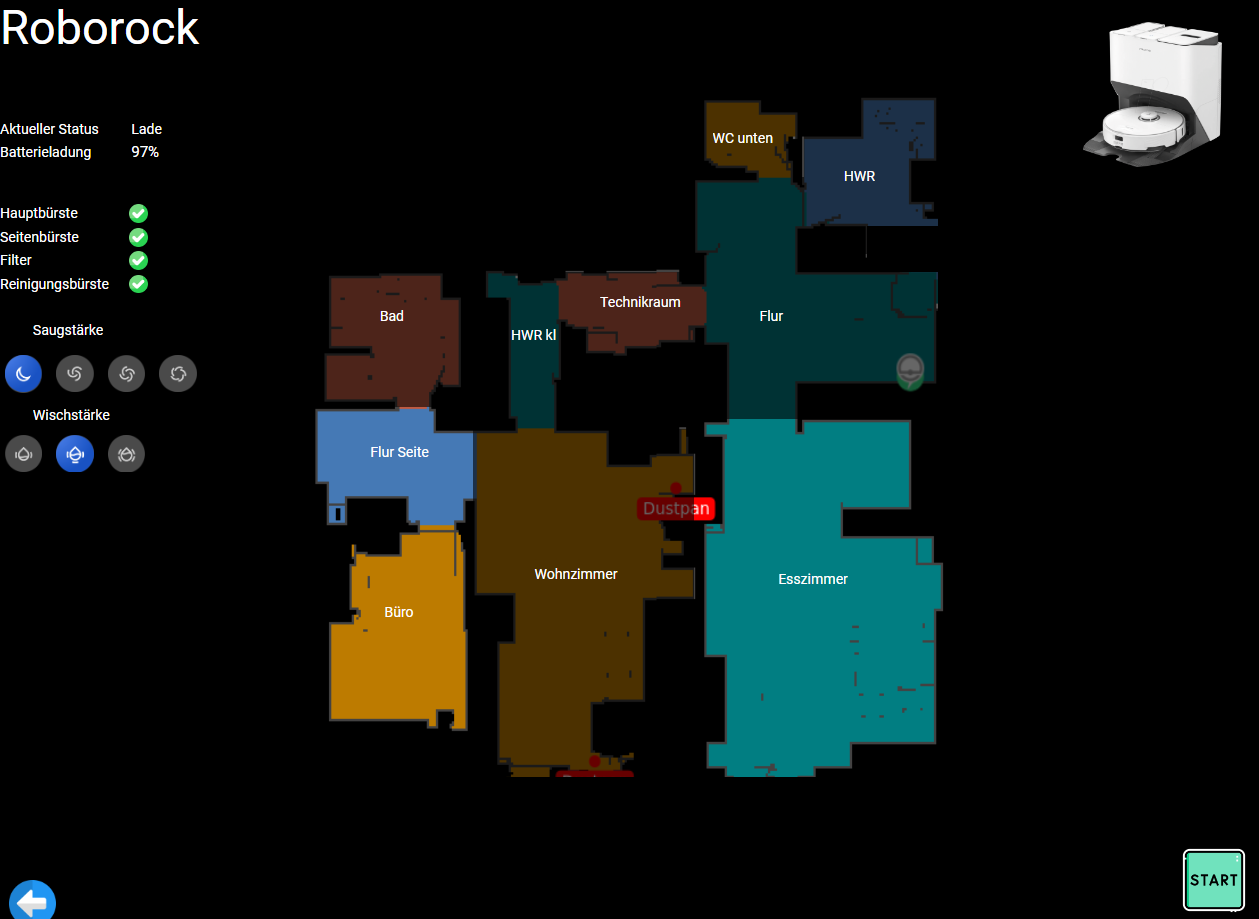
-
@flexer sieht gut aus.
-
@flexer Sauber! Wie hast du die Map da so rein bekommen?
-
@earl80 Eigentlich genau wie hier. Man muss dann im blockly die größe anpassen. Statt% geht auch width="1000px" width="800px" zum beispiel.
@maxb sagte in Neuer Adapter für Roborock-Staubsauger:
Hallo!
Es wurde ja schon über die Darstellung einer Karte gesprochen und dass das nicht so einfach funktionert, da die Karte nur als Base64-Image vorliegt.
Ich habe mal etwas getüftelt und vielleicht hilft es dem ein oder anderen:Die Base64-Images sind ganz normale HTML-"Bilder", die man z.B. in einer Visu nutzen kann, leider aber nicht einfach so, sondern nur über Umwege.
Der HTML-Code für die Einbindung eines Bas64-Bildes ist so aufgebaut:<img src="[BASE64-CODE]">Also eigentlich alles kein Hexenwerk. Wenn man aus dem Datenpunkt den Code kopiert und in ein HTML-Objekt in VIS einfügt, wird die Karte auch wunderbar dargestellt, aber natürlich nicht aktualisiert. Da man über geschweifte Klammern direkt in VIS auf den Inhalt eines Datenpunktes zugreifen kann, dachte ich, dass man das über
<img src="{roborock.0.Devices.ID.map.mapBase64}">lösen kann, das funktioniert aber so nicht. Sollte jemand wissen, wie das funktioniert, gerne melden!
Ich habe das dann so gelöst, dass ich eine script erstellt habe, was nichts anderes macht, als die spitzen Klammern davor und dahinter zu setzen und das alles in einer neuen Variable zu speichern. Diesen String kann ich dann über die geschweiften Klammern in VIS einbinden, es funktionert alles ohne Probleme!
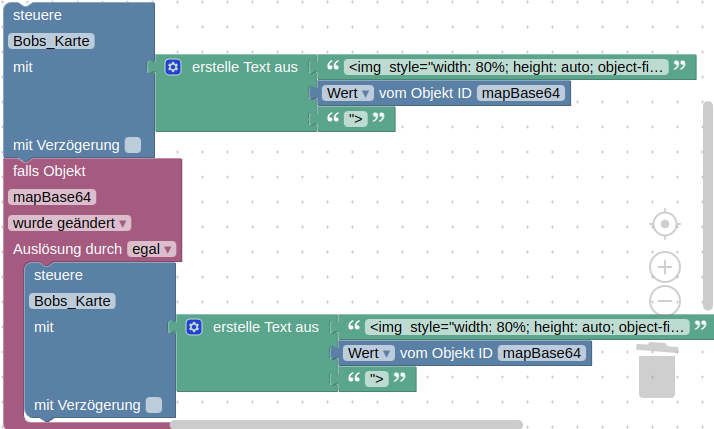
Code:
Hinweise:- In VIS im Editor wird immer nur das Objekt in geschweiften Klammern dargestellt. Geladen wird der Inhalt erst in der feriten VIS!
- die zusätzlichen Inhalte style="[...]" skalieren und beschneiden das Bild, damit es vernünftig dargestllt werden kann. Da muss man je nach Karte schauen wie es passt. Bei mir ist der Bereich oben links des Bildes erstmal sehr viel weiß, weshalb ich da viel wegschneiden muss, bis die eigentliche Karte zu sehen ist, spielt einfach mit den Werten.
- Die Aktualisierungsrate der Karte ist wirklich mäßig. Ich weiß nicht in welchen Intervallen das passiert, es scheint immer so gegen Ende der Reinigung zu sein, manchmal auch währenddessen, manchmal auch im Dock. Woran das liegt weiß vermutlich nur Roborock.
Bei Bedarf kann ich das hier gerne noch fürs WIKI auf englisch aufbereiten, ich habe da aber keine Schreibrechte drauf.
Viel Spaß damit, Anmerkungen oder Fragen sind willkommen!
-
@jahnbes Würdest du dein Skript für die Raumreinigung mit uns teilen als .txt file?
-
@copystring said in Neuer Adapter für Roborock-Staubsauger:
@rmortan es ist nicht möglich die Karte auf Raspberry Pi zu verwenden.
Kannst du mir sagen warum das nicht aus dem PI läuft? Danke
Gruß
-
Dazu steht ganz weit oben (oder im tester Thread vom Anfang des Adapters) schonmal was. Liegt wohl irgendwie an arm
-
@david-g said in Neuer Adapter für Roborock-Staubsauger:
Dazu steht ganz weit oben (oder im tester Thread vom Anfang des Adapters) schonmal was. Liegt wohl irgendwie an arm
Ok, danke für die info. Also müsste man auf einen Nuc umstellen?!
-
@tobias04 sagte in Neuer Adapter für Roborock-Staubsauger:
müsste man auf einen Nuc umstellen?!
Oder auf sonst einen x64 Prozessor.
-
@maxb said in Neuer Adapter für Roborock-Staubsauger:
Diesen String kann ich dann über die geschweiften Klammern in VIS einbinden, es funktionert alles ohne Probleme!
Hallo,
Ich schaffe alles (Blockly Script und Variable) bis auf diesen letzten Schritt. Bitte um eine Erklärung wie das genau geht.
Danke
StefanEDIT GELÖST: Funktioniert über ein Basic - String (unescaped)
-
So habe jetzt meine Steuerung etwas umgebaut. Habe die Steuerung in meinen Grundriss integriert. Abgedunkelte Räume sind deselektiert und helle Räume sind zur Reinigung ausgewählt. Kann diese Ansicht an bzw ausschalten.
Hier ein Video dazu.
-
Hallo zusammen,
ich habe mir einen Q Revo zugelegt und auch gleich den Adapter installiert....eine super Sache!
Hab mir schon einige Beiträge durchgelesen hab aber noch nichts dazu gefunden:Gibt es auch eine Möglichkeit das man den Q Revo über den Adapter nur saugen lässt?
Ich habe bei mir nur eine Ebene eingerichtet, und hatte die Einzelraum Reinigung mal über segmented clean angestossen - was auch geklappt hat.
Bei einem zweiten Versuch hatte es dann nicht mehr geklappt.Raumnamen wurden in der App vergeben und wurden auch nicht geändert.
Habt ihr da einen Tipp für mich?Ich nutze die Adapter Version 0.4.4
-
Hallo zusammen,
ich habe den Adapter 0.4.4 installiert und getestet. Soweit funktioniert die Steuerung gut.
Allerdings kann ich die Wischintensität nicht einstellen. Mir fehlt in der Objektliste set_water_box_custom_mode. Hat noch einer diese Problem. Was könnte ich sonst noch tun?
Danke
Stefan
