Roborock Adapter tester gesucht
-
roborock.0 2023-01-20 10:46:41.935 error MQTT on message error: data.payload.dps / data.payload.dps['102] is not available! roborock.0 2023-01-20 10:46:41.935 debug --------- reached data protocol 102 roborock.0 2023-01-20 10:46:36.180 debug --------- reached data protocol 301 roborock.0 2023-01-20 10:46:36.116 debug --------- reached data protocol 102 roborock.0 2023-01-20 10:46:36.081 info My Home: First device get_prop RESULT: {"msg_ver":2,"msg_seq":281,"state":8,"battery":48,"clean_time":7089,"clean_area":41795000,"error_code":0,"map_present":1,"in_cleaning":1,"in_returning":0,"in_fresh_state":0,"lab_status":3,"water_box_status":1,"fan_power":103,"dnd_enabled":0,"map_status":3,"is_locating":0,"lock_status":0,"water_box_mode":202,"water_box_carriage_status":1,"mop_forbidden_enable":1,"camera_status":3495,"is_exploring":0,"home_sec_status":0,"voice_chat_status":0,"home_sec_enable_password":0,"adbumper_status":[0,0,0],"water_shortage_status":0,"dock_type":3,"dust_collection_status":0,"auto_dust_collection":1,"avoid_count":0,"mop_mode":300,"back_type":-1,"wash_phase":0,"wash_ready":0,"debug_mode":0,"collision_avoid_status":1,"switch_map_mode":0,"dock_error_status":39,"charge_status":1,"unsave_map_reason":0,"unsave_map_flag":0,"events":[]} roborock.0 2023-01-20 10:46:36.081 debug --------- reached data protocol 102 roborock.0 2023-01-20 10:46:35.966 debug My Home -- Granted variable: [{"topic":"rr/m/o/7b5ptErMcfO35Wuo2YXJsA/cf1e6126/#","qos":0}] roborock.0 2023-01-20 10:46:33.787 info - wait 2 seconds ---------------------------------------- roborock.0 2023-01-20 10:46:33.786 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.drying_status ... roborock.0 2023-01-20 10:46:33.785 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.charge_status ... roborock.0 2023-01-20 10:46:33.785 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.task_cancel_in_motion ... roborock.0 2023-01-20 10:46:33.784 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.task_cancel_low_power ... roborock.0 2023-01-20 10:46:33.783 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.task_complete ... roborock.0 2023-01-20 10:46:33.783 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.additional_props ... roborock.0 2023-01-20 10:46:33.782 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.filter_life ... roborock.0 2023-01-20 10:46:33.782 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.side_brush_life ... roborock.0 2023-01-20 10:46:33.781 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.main_brush_life ... roborock.0 2023-01-20 10:46:33.781 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.water_box_mode ... roborock.0 2023-01-20 10:46:33.780 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.fan_power ... roborock.0 2023-01-20 10:46:33.779 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.battery ... roborock.0 2023-01-20 10:46:33.779 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.state ... roborock.0 2023-01-20 10:46:33.778 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.error_code ... roborock.0 2023-01-20 10:46:33.777 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.rpc_response ... roborock.0 2023-01-20 10:46:33.777 debug Create state for 42yfoQm5eOY3gARZw6xgU.info.rpc_request ... roborock.0 2023-01-20 10:46:33.776 debug Creating objects for Roborock S7 MaxV - id: 42yfoQm5eOY3gARZw6xgU ... roborock.0 2023-01-20 10:46:33.772 debug My Home: Received Roborock S7 MaxV (model: roborock.vacuum.a27) roborock.0 2023-01-20 10:46:33.656 debug benutzer@email.de: Initializing the "real" Roborock API... roborock.0 2023-01-20 10:46:33.515 debug benutzer@email.de: Getting home details... roborock.0 2023-01-20 10:46:33.515 debug benutzer@email.de: Last user data update from Cloud: 3 hours ago. Since less than 30 days: not updating. roborock.0 2023-01-20 10:46:33.513 debug benutzer@email.de: Getting user data... roborock.0 2023-01-20 10:46:33.512 debug benutzer@email.de: Initializing the login API... roborock.0 2023-01-20 10:46:33.499 info starting. Version 0.0.1-alpha (non-npm: copystring/ioBroker.roborock#c80b4c534cbd37ca3acf3ab2f25519b0db176a72) in C:/Program Files/iobroker/SmartHome/node_modules/iobroker.roborock, node: v16.19.0, js-controller: 4.0.24 roborock.0 2023-01-20 10:46:33.362 debug States connected to redis: 127.0.0.1:9900 roborock.0 2023-01-20 10:46:33.343 debug States create User PubSub Client roborock.0 2023-01-20 10:46:33.342 debug States create System PubSub Client roborock.0 2023-01-20 10:46:33.332 debug Redis States: Use Redis connection: 127.0.0.1:9900 roborock.0 2023-01-20 10:46:33.316 debug Objects connected to redis: 127.0.0.1:9001 roborock.0 2023-01-20 10:46:33.313 debug Objects client initialize lua scripts roborock.0 2023-01-20 10:46:33.279 debug Objects create User PubSub Client roborock.0 2023-01-20 10:46:33.279 debug Objects create System PubSub Client roborock.0 2023-01-20 10:46:33.278 debug Objects client ready ... initialize now roborock.0 2023-01-20 10:46:33.255 debug Redis Objects: Use Redis connection: 127.0.0.1:9001 roborock.0 2023-01-20 10:46:29.080 info Terminated (ADAPTER_REQUESTED_TERMINATION): Without reasonHab mal die mailadresse abgeändert
-
@m-a-hueb sagte in [Tester gesucht] Roborock-API:
MQTT on message error: data.payload.dps / data.payload.dps['102] is not available!
Ich kenne mich mit ioBroker auf Windows nicht aus aber kann es sein das die WIndows Firewall bzw. Defender das blockt ?
-
@m-a-hueb Dass dort '102 steht ist merkwürdig. Da müsste 102 stehe ohne das Apostroph. Vielleicht stimmt etwas mit dem nodejs nicht. Ich habe den Adapter selbst auf Windows und Linux in Verwendung und läuft einwandfrei.
EDIT: ich habe nodejs 16 in Verwendung.
-
@copystring an der Firewall liegts nicht. Hab sie testweise deaktiviert. Nod.js hab ich in version 16.19.0 npm 8.19.3
-
Der Adapter läuft auf meinem Raspi super,
jedoch bekomme ich bei den Objekten "Device Status" keine Wertänderungen
in allen anderen Kategorien bekomme ich änderungen, Befehle funktionieren auch.Ich habe einen Roborock S7
-
Testet mal bitte die neue Version. Es hat sich sehr viel geändert. Das bedeutet ihr müsst entweder den adapter ein mal löschen und neu installieren oder den Ordner von Roborock in den Objekten löschen.
Einzelne Räume zu säubern sollte laufen.
Erst wenn das entsprechende Stockwerk über load_multi_map ausgewählt wurde erscheinen die entsprechenden Räume und können eingestellt werden. Das scheint eine limitierung von der Roborock API zu sein. -
@copystring said in [Tester gesucht] Roborock-API:
Testet mal bitte die neue Version. Es hat sich sehr viel geändert. Das bedeutet ihr müsst entweder den adapter ein mal löschen und neu installieren oder den Ordner von Roborock in den Objekten löschen.
Einzelne Räume zu säubern sollte laufen.
Erst wenn das entsprechende Stockwerk über load_multi_map ausgewählt wurde erscheinen die entsprechenden Räume und können eingestellt werden. Das scheint eine limitierung von der Roborock API zu sein.gibts einen Anhaltspunkt, wie ich nach der Installation erkennen könnte, obs die neue Version ist?
-
@copystring said in [Tester gesucht] Roborock-API:
Testet mal bitte die neue Version. Es hat sich sehr viel geändert. Das bedeutet ihr müsst entweder den adapter ein mal löschen und neu installieren oder den Ordner von Roborock in den Objekten löschen.
Einzelne Räume zu säubern sollte laufen.
Erst wenn das entsprechende Stockwerk über load_multi_map ausgewählt wurde erscheinen die entsprechenden Räume und können eingestellt werden. Das scheint eine limitierung von der Roborock API zu sein.Hi. Ich hab's schnell ausprobiert und es funktioniert.
Zuerst die gewünschten Räume unter floors auf true oder false setzten und dann mit app_segment_clean die Reinigung starten.
Sehr gut. -
@copystring Vielen Dank, dass Du Dich des Adapters angenommen hast!
Habe den Adapter komplett gelöscht und dann die neue Version installiert.
Nun sehe ich meine beiden Etagen, aber keinerlei Räume mehr?Ich weiss, Dokumentation ist immer ein wenig langweilig, aber so ein kleines bisschen Anleitung wie man den Roborock dann zu verschiedenen Aktionen bewegt, wäre schön.
Welche Datenpunkte sind wo zu finden und was machen die?
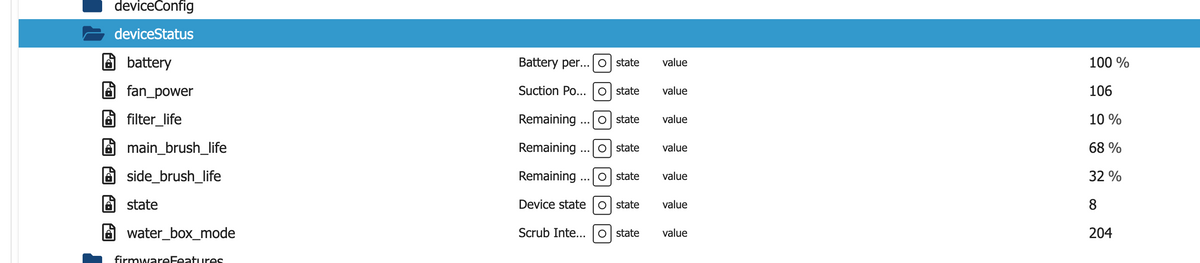
Wo finde ich welche Info (z.B. Batteriestand ist hier roborock.0.Devices.lvv6NMk0FgHC9CvYhGlBT.deviceStatus.battery ; aber bei mir immer Null).Planst Du auch irgendwie die Map darstellen zu können?
-
@simplyclever
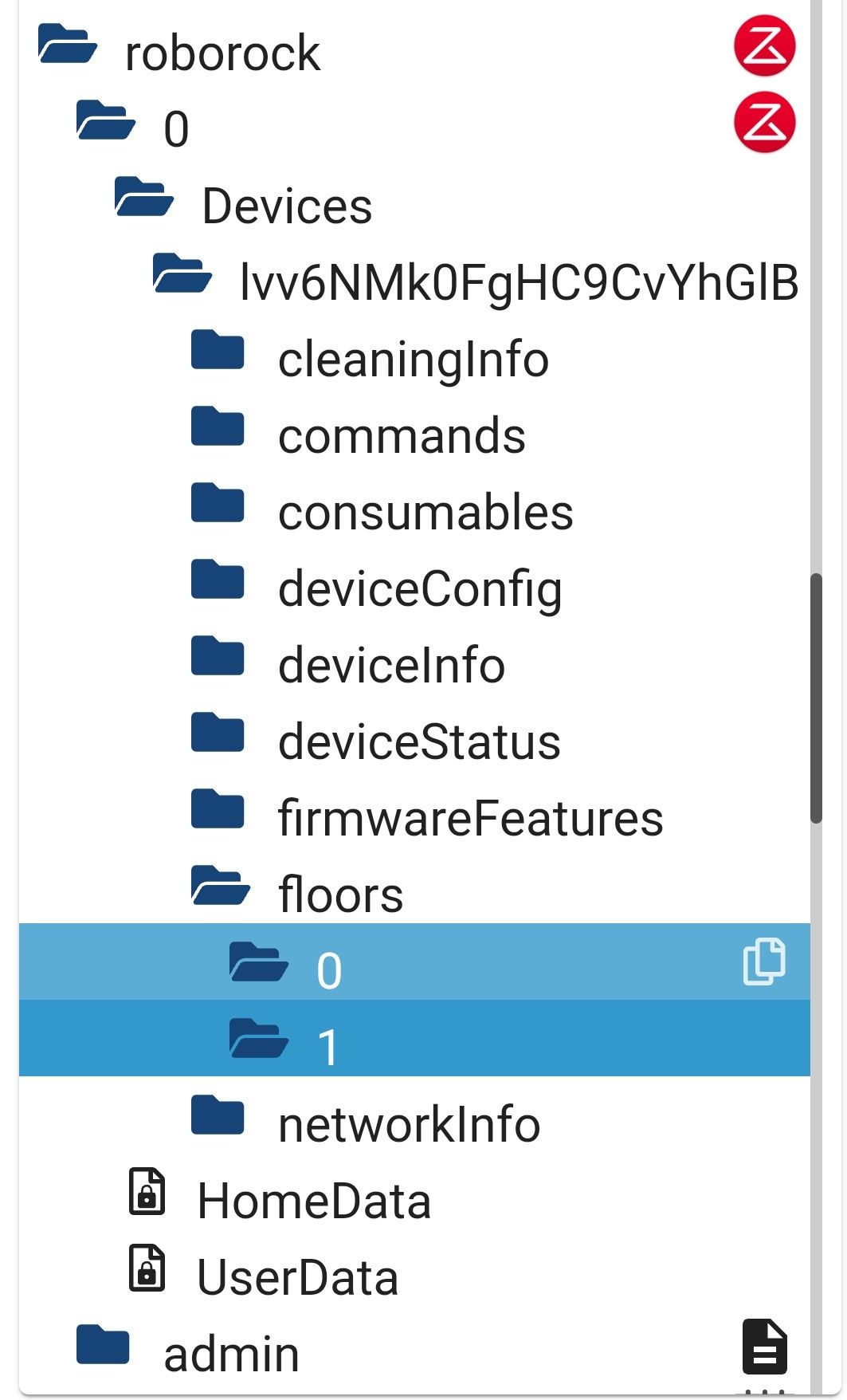
Unter den Datenpunktordner floors müssten die einzelne Räume sichtbar sein. -
Frage an die Runde, da ich nicht wirklich ein Programmierer bin. Evtl gibt's ja eine einfache Lösung.
Wie kann ich über blockly alle Werte im Ordner floors auf false setzen. Brauche das für die Raumreinigung über Alexa.
Erst alle auf false und dann die per Sprache ausgewählten auf true.Per Default sind ja anfangs alle auf true.
Danke
-
@dontoben Waren Sie bisher auch. Jetzt nicht mehr:
Nur um sicher zu gehen, dass hier ist der aktuelle Github Link?
https://github.com/copystring/ioBroker.roborock -
@simplyclever Ich habe da auch nichts mehr stehen. Habe nur eine Etage die der bearbeiten muss und keine Ahnung was ich bei

Auswählen, einstellen soll.
-
@copystring said in [Tester gesucht] Roborock-API:
Testet mal bitte die neue Version. Es hat sich sehr viel geändert. Das bedeutet ihr müsst entweder den adapter ein mal löschen und neu installieren oder den Ordner von Roborock in den Objekten löschen.
Einzelne Räume zu säubern sollte laufen.
Erst wenn das entsprechende Stockwerk über load_multi_map ausgewählt wurde erscheinen die entsprechenden Räume und können eingestellt werden. Das scheint eine limitierung von der Roborock API zu sein.sollte das so aussehen? also die floors ohne jeglichen Eintrag?
hab Instanz, Adapter und Objekte gelöscht und neu installiert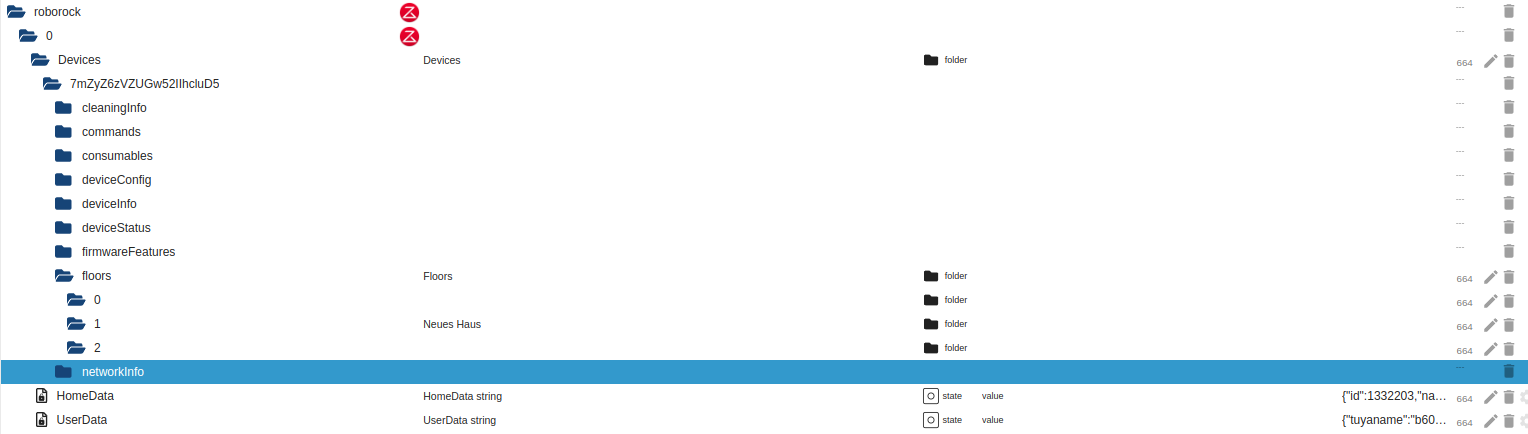
-
@dontoben sagte in [Tester gesucht] Roborock-API:
@copystring said in [Tester gesucht] Roborock-API:
Testet mal bitte die neue Version. Es hat sich sehr viel geändert. Das bedeutet ihr müsst entweder den adapter ein mal löschen und neu installieren oder den Ordner von Roborock in den Objekten löschen.
Einzelne Räume zu säubern sollte laufen.
Erst wenn das entsprechende Stockwerk über load_multi_map ausgewählt wurde erscheinen die entsprechenden Räume und können eingestellt werden. Das scheint eine limitierung von der Roborock API zu sein.Hi. Ich hab's schnell ausprobiert und es funktioniert.
Zuerst die gewünschten Räume unter floors auf true oder false setzten und dann mit app_segment_clean die Reinigung starten.
Sehr gut.Was hast du denn bei Load Multi Map gemacht ?
-
Habe versucht das Object "load_multi_map" mit verschiendenen Werten zu beschreiben. Egal on "0", "1", true oder false, String, Number, Boolean, es kommt immer die letzte Zeile mit in der nur die eckigen klammern am Ende stehen.
2023-01-21 10:32:23.449 - debug: roborock.0 (972053) onStateChange: load_multi_map with value: 1 2023-01-21 10:32:23.541 - debug: roborock.0 (972053) dps debug: {"id":200,"error":{"code":-10005,"message":"First element in array is not an Number"}} 2023-01-21 10:32:23.633 - debug: roborock.0 (972053) dps debug: {"id":201,"result":[]} 2023-01-21 10:32:23.633 - debug: roborock.0 (972053) get_room_mapping via load_multi_map: [] -
@homecineplexx said in [Tester gesucht] Roborock-API:
@copystring said in [Tester gesucht] Roborock-API:
gibts einen Anhaltspunkt, wie ich nach der Installation erkennen könnte, obs die neue Version ist?
Ja. Wenn floors unter dem jeweiligen Roboter angelegt ist.
@simplyclever said in [Tester gesucht] Roborock-API:
@copystring Vielen Dank, dass Du Dich des Adapters angenommen hast!
Habe den Adapter komplett gelöscht und dann die neue Version installiert.
Nun sehe ich meine beiden Etagen, aber keinerlei Räume mehr?Ich weiss, Dokumentation ist immer ein wenig langweilig, aber so ein kleines bisschen Anleitung wie man den Roborock dann zu verschiedenen Aktionen bewegt, wäre schön.
Welche Datenpunkte sind wo zu finden und was machen die?
Wo finde ich welche Info (z.B. Batteriestand ist hier roborock.0.Devices.lvv6NMk0FgHC9CvYhGlBT.deviceStatus.battery ; aber bei mir immer Null).Planst Du auch irgendwie die Map darstellen zu können?
Räume und Etagen befinden sich ab sofort unter dem jeweiligen Roboter da jeder Roboter seine eigene Etage haben kann.
Eine Dokumentation jetzt zu beginnen macht keinen Sinn. Der Adapter ist dafür in einen zu frühen Stadium und außerdem ändern sich ständig dinge.
Ich habe die Befehle so gestaltet, dass diese eigentlich selbsterklärend sein sollten bzw. habe ich zur neuen Version das wichtigste kurz erwähnt.
Die Map kommt (hoffentlich) auch irgendwann.@homecineplexx said in [Tester gesucht] Roborock-API:
sollte das so aussehen? also die floors ohne jeglichen Eintrag?
hab Instanz, Adapter und Objekte gelöscht und neu installiertJain. Du scheinst drei Karten zu haben wobei nur eine benannt wurde (Neues Haus). Schau mal was passiert wenn du über load_multi_map die Karte mit Nummer 1 auswählst. Dann müsste Neues Haus entsprechend gefüllt werden. Bei dir sind aber insgesamt drei Karten verfügbar. Die nicht benötigten müsstest du potentiell aus der App löschen damit es sauber funktioniert.
@wendy2702 said in [Tester gesucht] Roborock-API:
Habe versucht das Object "load_multi_map" mit verschiendenen Werten zu beschreiben. Egal on "0", "1", true oder false, String, Number, Boolean, es kommt immer die letzte Zeile mit in der nur die eckigen klammern am Ende stehen.
2023-01-21 10:32:23.449 - debug: roborock.0 (972053) onStateChange: load_multi_map with value: 1 2023-01-21 10:32:23.541 - debug: roborock.0 (972053) dps debug: {"id":200,"error":{"code":-10005,"message":"First element in array is not an Number"}} 2023-01-21 10:32:23.633 - debug: roborock.0 (972053) dps debug: {"id":201,"result":[]} 2023-01-21 10:32:23.633 - debug: roborock.0 (972053) get_room_mapping via load_multi_map: []load_multi_map nimmt nur Zahlen als werte an und sollte so aussehen:

Wenn du nur eine Karte hast sollte die 0 ausgewählt werden. Möglicherweise hast du deine Karte aber nie gespeichert und benannt? Dann könnte es sein, dass es nicht sauber funktioniert habe das aber nicht getestet. -
@copystring Ok, danke.
Aber die Räume sind definitiv nicht da. Ich habe nur einen Roboter. Unter Floors sind die beiden Etagen, soweit so gut. Aber in Floors ist halt nichts (keine Räume).
Was kann ich checken oder testen? -
@simplyclever load_multi_map eine Karte auswählen. Bei dir Karte 0. Dann sollte die Etage gefüllt werden.
-
@copystring Unter load_multi_map kann ich entweder "Erdgeschoss" oder "Obergeschoss" auswählen. Egal welches ich nehme, die Floors bleiben leer. Auch nach Restart der Instanz und Reload der Objekte. Habe einen Roborock S7 maxV
