Test Adapter Husqvarna Automower v0.3.x
-
@arnod Super, vielen Dank


-
@arnod said in Test Adapter Husqvarna Automower v0.3.x:
//*************************************************************************************************** //++++++++++++++++++++++++++++++++++++++++ USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++++ const instanz = '0_userdata.0.'; // Hier kann die Instanz angepasst werden const PfadEbene1 = 'Husqvarna.'; // Hier kann der Pfad angepasst werden const PfadEbene2 = ['Statistik.', 'Zeiten.', 'Allgemein.']; // Hier kann der Pfad angepasst werden const Mower_ID = 'xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx' // Mower ID vom Husqvarna Adapter const sID_Regensensor = 'hm-rpc.3.1.RAINING' // Pfad Regensensor true = Regen //++++++++++++++++++++++++++++++++++++++ ENDE USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++ //*************************************************************************************************** let drivenDistanceToday,drivenDistanceTotal,drivenDistance = 0,chargingTimeToday,chargingTimeTotal,chargingTime = 0,mowingTimeToday,mowingTimeTotal,mowingTime = 0; let chargingStationLatitude = 0,chargingStationLongitude = 0,distanceFromChargingStation = 0; // create required folders and states CreateState(); async function CreateState(){ for (let i = 0; i <= 3; i++) { createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Start Zeit ', desc: 'Start Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Ende Zeit ', desc: 'Ende Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); } await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday', 0, false, {name: 'Driven Distance Today', desc: 'Driven Distance Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal', 0, false, {name: 'Driven Distance Total', desc: 'Driven Distance Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday', 0, false, {name: 'Charging Time Today', desc: 'Charging Time Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday', 0, false, {name: 'Mowing Time Total', desc: 'Mowing Time Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation', 0, false, {name: 'Distance from charging station', desc: 'Distance from charging station', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'm'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink', '', false, {name: 'Link für Google Maps', desc: 'Link für Google Maps', role: 'value', type: 'string', read: true, write: true, def: ''}); log('-==== Alle Ordner und State wurden erstellt ====-') drivenDistanceToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday')).val; drivenDistanceTotal = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal')).val; chargingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday')).val; mowingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday')).val; } //******************************************************* Adapter Husqvarna-Automower *******************************************************/ const sID_Mower_activity = 'husqvarna-automower.0.' + Mower_ID + '.mower.activity' const sID_Latlong = 'husqvarna-automower.0.' + Mower_ID + '.positions.latlong' const sID_PARKUNTILNEXTSCHEDULE = 'husqvarna-automower.0.' + Mower_ID + '.ACTIONS.PARKUNTILNEXTSCHEDULE' const sID_MoverLatLong = 'husqvarna-automower.0.'+Mower_ID+'.positions.latlong' //************************************************************ Script Husqvarna *************************************************************/ const sID_drivenDistanceToday = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday'; const sID_drivenDistanceTotal = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal'; const sID_distanceFromChargingStation = instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation'; const sID_chargingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday'; const sID_mowingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday'; const sID_GoogleLink = instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink'; const sID_StartZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_0'; const sID_EndeZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_0'; const sID_StartZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_1'; const sID_EndeZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_1'; const sID_StartZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_2'; const sID_EndeZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_2'; const sID_StartZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_3'; const sID_EndeZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_3'; const arrayID_Zeiten =[sID_StartZeit_0,sID_EndeZeit_0,sID_StartZeit_1,sID_EndeZeit_1,sID_StartZeit_2,sID_EndeZeit_2,sID_StartZeit_3,sID_EndeZeit_3]; // reset variables "[...]Today" every midnight schedule('0 0 * * *', function () { drivenDistanceToday = 0; setState(sID_drivenDistanceToday, drivenDistanceToday, true); chargingTimeToday = 0; setState(sID_chargingTimeToday, chargingTimeToday, true); mowingTimeToday = 0; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get chargingTimeToday and chargingTimeTotal on({id: sID_Mower_activity, oldVal: 'CHARGING'}, function (obj) { chargingTime = obj.state.ts - obj.oldState.ts; log('chargingTime: ' + chargingTime/1000 + 's', 'debug'); chargingTimeToday = chargingTime + chargingTimeToday; setState(sID_chargingTimeToday, chargingTimeToday, true); }); // get mowingTimeToday and mowingTimeTotal on({id: sID_Mower_activity, oldVal: 'MOWING'}, function (obj) { mowingTime = obj.state.ts - obj.oldState.ts; log('mowingTime: ' + mowingTime/1000 + 's', 'debug'); mowingTimeToday = mowingTime + mowingTimeToday; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get distance from automower to charging station, drivenDistanceToday and drivenDistanceTotal on({id: sID_Latlong, change: 'ne'}, async function (obj) { if (getState(sID_Mower_activity).val === 'CHARGING' || getState(sID_Mower_activity).val === 'PARKED_IN_CS') { if (chargingStationLatitude !== 0 && chargingStationLongitude !== 0) { chargingStationLatitude = (Number(obj.state.val.split(';')[0]) + Number(chargingStationLatitude)) / 2; chargingStationLongitude = (Number(obj.state.val.split(';')[1]) + Number(chargingStationLongitude)) / 2; } else { chargingStationLatitude = obj.state.val.split(';')[0]; chargingStationLongitude = obj.state.val.split(';')[1]; } } distanceFromChargingStation = 1000 * 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(chargingStationLatitude * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(chargingStationLatitude * (Math.PI / 180)) * Math.cos(chargingStationLongitude * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceFromChargingStation: ' + distanceFromChargingStation + 'm', 'debug'); await setStateAsync(sID_distanceFromChargingStation, distanceFromChargingStation, true); if (getState(sID_Mower_activity).val === 'MOWING' || getState(sID_Mower_activity).val === 'GOING_HOME' || getState(sID_Mower_activity).val === 'LEAVING') { drivenDistance = 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(obj.oldState.val.split(';')[0] * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[1] * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceDriven: ' + drivenDistance + 'km', 'debug'); drivenDistanceToday = drivenDistanceToday + drivenDistance; drivenDistanceTotal = drivenDistanceTotal + drivenDistance; await setStateAsync(sID_drivenDistanceToday, round(drivenDistanceToday,2), true); await setStateAsync(sID_drivenDistanceTotal, round(drivenDistanceTotal,2), true); } }); // Uhrzeiten für StartZeit und EndZeit in Minuten umrechnen und Adapter ID's ändern on({id: arrayID_Zeiten, change: 'ne'}, async function (obj) { let arryObj_ID = obj.id.split('.') let ScheduleNr = arryObj_ID[4].substring(arryObj_ID[4].length-1,arryObj_ID[4].length) let Dauer_min =0, Start_min=0; let StartZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+ScheduleNr)).val; let EndeZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+ScheduleNr)).val; // Uhrzeit wird in Stunden und Minuten geteilt let arrayStartZeit = StartZeit.split(":"); let arrayEndeZeit = EndeZeit.split(":"); let StartZeit_Stunden = arrayStartZeit[0]; let EndeZeit_Stunden = arrayEndeZeit[0]; let StartZeit_Minuten = arrayStartZeit[1]; let EndeZeit_Minuten = arrayEndeZeit[1]; // Umrechnen der Uhrzeit in Minuten seit Tagesbeginn Start_min = (StartZeit_Stunden *60)+ parseInt(StartZeit_Minuten) // Umrechnen der Uhrzeit in Minuten von Start bis Ende Zeit (Dauer) Dauer_min = ((EndeZeit_Stunden *60)+ parseInt(EndeZeit_Minuten))-Start_min if(Dauer_min <0){Dauer_min = 0;} await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.start',Start_min) await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.duration',Dauer_min) }); //Google Maps Link aktualisieren, wenn sich die Koordinaten ändern. on({id: sID_MoverLatLong, change: "ne"}, async function (obj) { let arryLatLong = getState(obj.id).val.split(';'); let GoogleLink = 'https://www.google.com/maps/place/'+arryLatLong[0]+','+arryLatLong[1]+'/@?hl=de'; await setStateAsync(sID_GoogleLink,GoogleLink); }); // Bei Regen Parken bis zum nächsten Start on({id: sID_Regensensor, change: 'ne', val: true}, async function (obj) { await setStateAsync(sID_PARKUNTILNEXTSCHEDULE,true); log('-==== Es regnet, Mäher wird geparkt ====-','warn') }); // Runden. Parameter float wert, int dez Anzahl der Stellen function round(wert, dez) { let umrechnungsfaktor = Math.pow(10,dez); return Math.round(wert * umrechnungsfaktor) / umrechnungsfaktor; }Nochmal danke für dein Skript. Hat auch funktioniert. Datenpunkte wurden agelegt. Aber leider sind sie nicht beschrieben wurden. Muss ich in dem Skript ausser der Mover Id noch was eingeben?
-
@lustig29
Eigentlich nicht, außer der Adapter Husqvarna hat bei dir eine andere Instanz als 0, dann musst du das noch bei//******************************************************* Adapter Husqvarna-Automower *******************************************************/Einstellen und
husqvarna-automower.0.inhusqvarna-automower.1.ändern. -
Hi,
ich wollte das Modul in Betrieb nehmen, leider kommt diese Fehlermeldung.updateStatus mower object is NULLKann mir jemand sagen, was das sein könnte?
VG
Schmidti -
Hallo,
ich würde gerne den Adapter "husqvarna-automower v0.3.3-beta.1"
mit unserem Husqvarna Automower 405x "Firmware 5995776-12D_P16-SwPkg_47.11 (2023-03)" in Betrieb nehmen.Der verwendete iobroker ist in folgender Version vorhanden:
iobroker Admin v6.3.5
Node.js: v16.18.1
NPM: 8.19.2Einen Application-Key und ein Application-Secret habe ich mir bei developer.husqvarana.com erstellt.
Die Instanz wird gestartet und scheint auch Daten abzurufen, allerdings bleibt der Status der Instanz immer bei einem
gelben Ausrufenzeichen.Sind Einstellungen an den Instanzen Websocket und Socket.io generell notwendig, oder nur dann, wenn ich Daten an den 405x senden möchte?
Gruß Andreas
-
@arnod guten Morgen, wo bekomme ich denn das Bild für den Husqvarna her? Die Seite kann ich importieren, aber ohne Bilder. Beste Grüße
-
@rissn
Da hilft Google. Ein Bild suchen was passt und einfach den Hintergrund (z.B. mit Gimp) ausschneiden, sodass dieser Transparent ist.
Oder für ganz Faule, das hier verwenden.")

-
@arnod vielen Dank, hatte es natürlich auch aus dem Netz gezogen und als png umgewandelt
-
~~sry leute aber evtl bin ich einfach zu blind oder zu doof.
ich habe gerade v0.3.3 installiert.
habe auch einen Dev Acc bei Husqvarna erstellt.
bekomme nun vom Adpater folgende Meldung:husqvarna-automower.0 error Error: No Objects found, no Objects created. Check API (ERR_#008). (ERR_#004)ich denke mir, ja klar kann der nichts finden, der Dev Account kennt ja meine Automower nicht...
Jetzt meine Dummyfrage: Wie verbinde ich meine Mäher mit dem Dev Account?~~
ok... sry ist spät... wenn ich mich auch mit dem falschen Account anmelde... so geh pennen... n8 -
@greyhound
Wenn der Adapter funktioniert bitte in den Repositories veröffentlichen.
Falls Hilfe dazu benötigt wird, bitte Bescheid geben.
Danke -
@mcm57
Hallo,
neue Saison hat begonnen - und gleich ein Problem!
Die Entfernung zur Basis wird nicht richtig berechnet, bzw. wird der Nullpunkt in der Ladestation nicht gesetzt.
Der Entfernungswert liegt mom. bei 5737207,91m ???
Das hat aber schon mal funktioniert.
Ich benutze die v0.4.0-beta.3 und das hoffentlich zugehörige "Script for statistics" aus dem GitHub ice987987
kann mir jemand dazu helfen?
Gruß
Gerhard -
@ghifunk das hatte ich auch, nach 2-3x fahren war es dann wieder richtig, also denke ich, die GPS Daten brauchen erstmal ne Weile um gesammelt zu werden.
-
@andreasw63 Hallo. Konntest Du das Problem lösen? Stehe nämlich auch vor diesem Problem. Gruß...
-
hi zusammen,
ich habe den Adapter "ice987987 / ioBroker.husqvarna-automower" Version 0.5.0-beta.3 installert, aber er läuft nicht richtig.
Folgende Fehlermeldung:
error TypeError: Cannot read properties of undefined (reading 'dirty') (ERR_#004)
Hat jmd eine Idee?
Danke, Peter -
@pehe28
Isuue aufgemacht in Github? -
@reutli
Nein, noch nicht. -
-
@reutli
schon...
ich habe über url istalliert
wie kann ich denn eine stabile Version installieren?
-
@pehe28
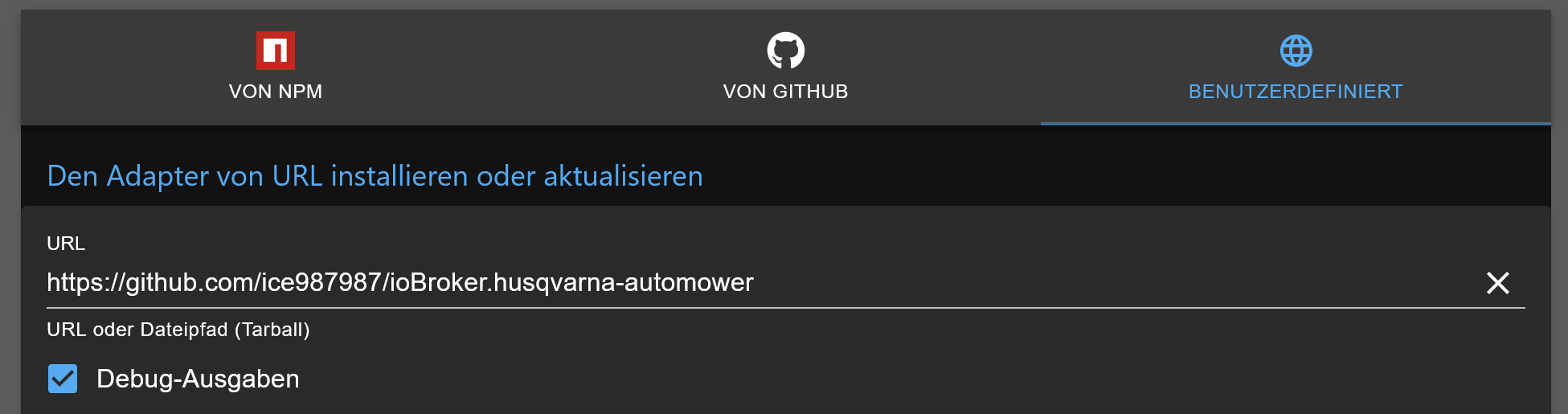
genau so kannste auch eine bestimmte Verison herunterladen und installieren: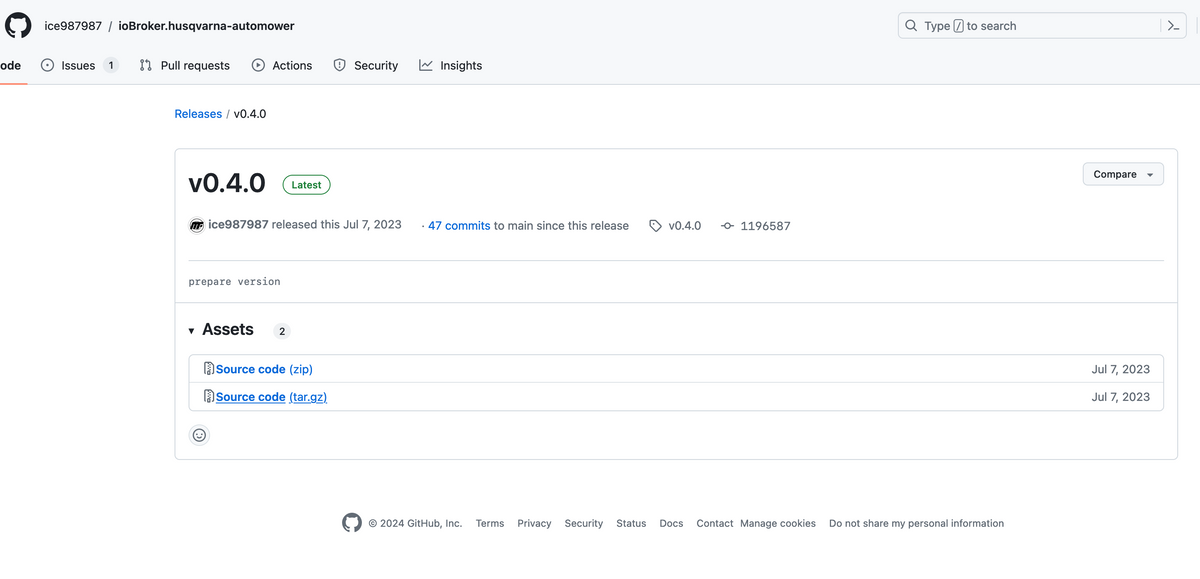
Download tar.gz
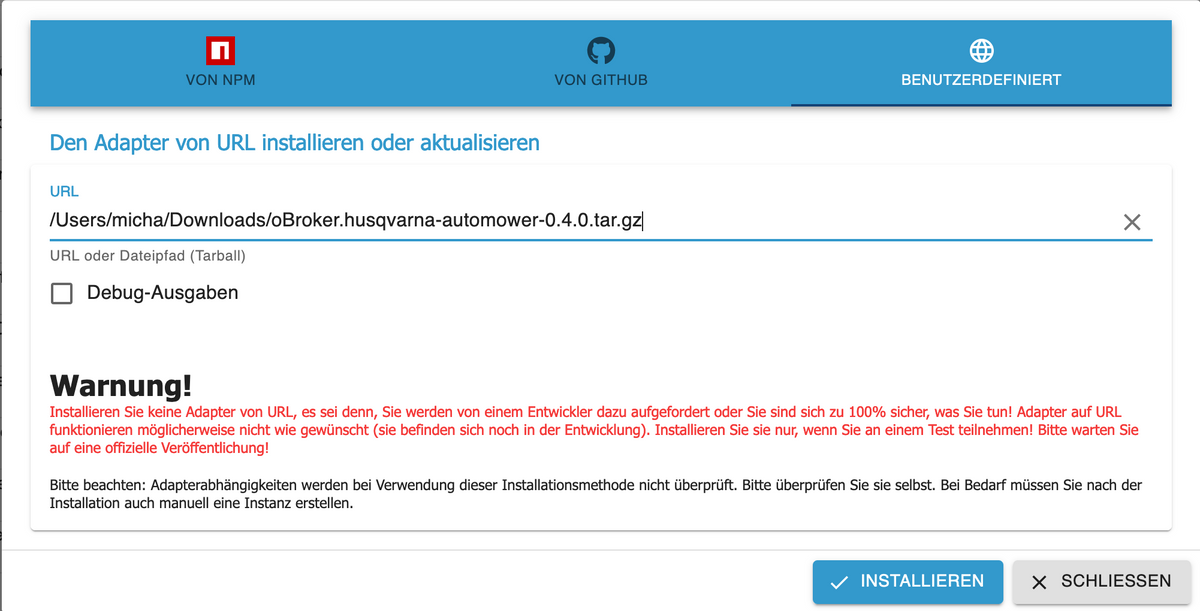
Verzeichnis des Downloadordners und Dateiname angeben
Kann es nur gerade nicht testen, da kein Testsystem am Start und setze den Adapter selbst ein (in der 0.3 Verison) -
iobroker.husquarna-automower@latest
iobroker.husquarne-automower@1.2.3installiert die gewünschte Version von npm
Falls ein Adapter nicht im Repository gelistet ist bitte ein Issue im Adapter Repo erstellen un den Mainatienr ersuchen eine Aufnahme in die Repositories zu veranlassen.
