

Test Adapter Husqvarna Automower v0.3.x
-
@arnod hallo,
ich habe eben nochmal die Daten etwas aufgeschlüsselt:
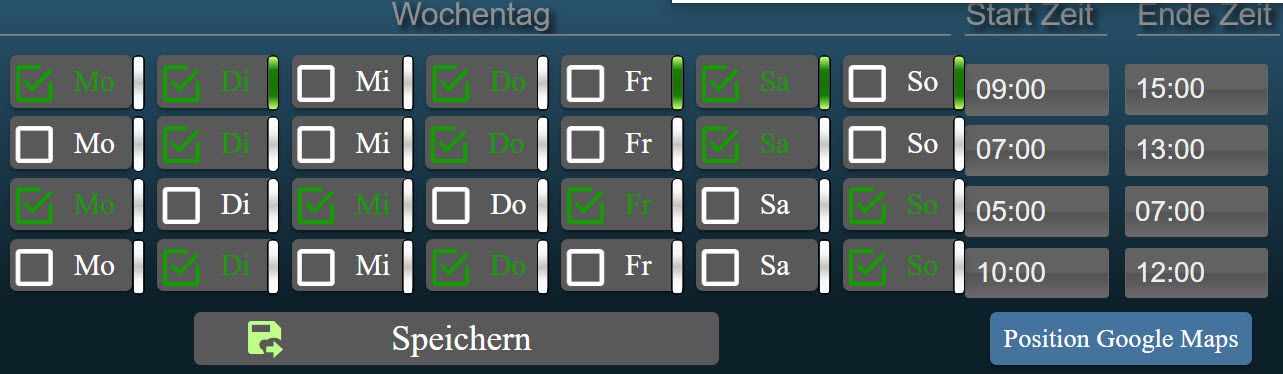
Ich denke mal, da ist was durcheinander... ist original so aus dem Log kopiert!Content-Length":607},"method":" post","url":"https://api.amc.husqvarna.dev/v1/mowers/xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx/calendar","data":"{"data":{ "type":"calendar","attributes":{"tasks":
[{"start":540,"duration":360,"monday":true ,"Dienstag":wahr,"Mittwoch":falsch,"Donnerstag":wahr,"Freitag":falsch,"Samstag":wahr,"Sonntag":falsch},
{"Start":420,"Dauer":360,"Montag":false,"Dienstag":true,"Mittwoch":false,"donnerstag":wahr,"freitag":falsch,"samstag":wahr,"sonntag":falsch},
{"start":300,"dauer":120," Montag":wahr,"Dienstag":falsch,"Mittwoch":wahr,"Donnerstag":falsch,"Freitag":wahr,"Samstag":falsch,"Sonntag\ ":true},
{"Start":600,"Dauer":120,"Montag":false,"Dienstag":true,"Mittwoch":false,"Donnerstag\ ":true,"freitag":false,"samstag":false,"sonntag":true}]}}}"}donnerstag":falsch,"freitag":true,"samstag":falsch,"sonntag":true},
{"start":600,"dauer":120," Montag":falsch,"Dienstag":wahr,"Mittwoch":falsch,"Donnerstag":wahr,"Freitag":falsch,"Samstag":falsch,"Sonntag\ ":Stimmt}]}}}"}donnerstag":falsch,"freitag":true,"samstag":falsch,"sonntag":true},
{"start":600,"dauer":120," Montag":falsch,"Dienstag":wahr,"Mittwoch":falsch,"Donnerstag":wahr,"Freitag":falsch,"Samstag":falsch,"Sonntag\ ":Stimmt}]}}}"}
dazu die Eingabemaske:
[onStateChange]: HTTP-Statusantwort: 400; headers: {"content-type":"application/vnd.api+json","
content-length":"435","connection":"close","date":"Mi, 31. Aug. 2022 13:03 :16 GMT","
x-amzn-requestid":"zzzzzz-zzzz-zzzz-zzzz-zzzzzzzzzzzz","
x-amzn-remapped-content-length":"435","x-amzn-remapped-connection" :"keep-alive","
x-amz-apigw-id":"XutTTFnQjoEFW0g=","x-amzn-remapped-date":"Mi, 31. August 2022 13:03:16 GMT","
x-cache ":"Fehler von cloudfront","via":"1.1 b88825ad151091557d336c3519215162.cloudfront.net (CloudFront)","
x-amz-cf-pop":"TXL52-C1","x-amz-cf-id": " r4Pv0Um_UADmOY2-N1yfx3SIGAGv12Kbd3RlfL9iJo8if3HOqad0Lg=="};
Daten: {"errors":[{"id":"yyyyyyyy-yyyy-yyyy-yyyy-yyyyyyyyyyyy","status":"400","code":"
invalid.mower. schedule.format","title":"Ungültiges Mähplanformat","detail":"Ungültiges Planformat im Anfragetext.
Parsing-Nachricht: Mehr als zwei Aufgaben betreffen den Dienstag. Entstand beim Hinzufügen: MowerSchedule.
Task[start=600,duration=120,monday=false,tuesday=true,wednesday=false,thursday=true,friday=false,saturday=false,sunday=true,missionId=<null>] "}]}
Ungültiges Mähplanformat","detail":"Ungültiges Planformat im Anfragetext.
Parsing-Nachricht: Mehr als zwei Aufgaben betreffen den Dienstag. Entstand beim Hinzufügen:
MowerSchedule.Task[start=600,duration=120,monday=false,tuesday=true,wednesday=false,thursday=true,friday=false,saturday=false,sunday=true,missionId=<null>] "}]}
Ungültiges Mähplanformat","detail":"Ungültiges Planformat im Anfragetext.
Parsing-Nachricht: Mehr als zwei Aufgaben betreffen den Dienstag. Entstand beim Hinzufügen: MowerSchedule.
Task[start=600,duration=120,monday=false,tuesday=true,wednesday=false,thursday=true,friday=false,saturday=false,sunday=true,missionId=<null>] "}]}Werden die anderen Objekt ID's vom Adapter befüllt oder bleiben alle leer?
Ich würde mal mit einem Timer anfangen und alle anderen löschen.
Prüfe mal, ob beim Ändern der Tage in der ersten Zeile in VIS auch die entsprechenden ID's vom Adapter geändert werden (...calendar.0.monday bis sundday), wenn ja, dann mal speichern und im LOG schauen, wie die Antwort von Husqvarna ist, ob die Werte übernommen wurden.
Versuch es mal nur mit einem Tag und prüfe, ob die Rückantwort von Husqvarna passt. -
Werden die anderen Objekt ID's vom Adapter befüllt oder bleiben alle leer?
Ich würde mal mit einem Timer anfangen und alle anderen löschen.
Prüfe mal, ob beim Ändern der Tage in der ersten Zeile in VIS auch die entsprechenden ID's vom Adapter geändert werden (...calendar.0.monday bis sundday), wenn ja, dann mal speichern und im LOG schauen, wie die Antwort von Husqvarna ist, ob die Werte übernommen wurden.
Versuch es mal nur mit einem Tag und prüfe, ob die Rückantwort von Husqvarna passt.@arnod
Hallo, habe jetzt nur den ersten timer stehen gelassen. Es erfolgt auch nur die entsprechende Ausgabe, welche zumindest die richtigen Werte beinhaltet. Es erfolgt aber wieder eine Fehlermeldung.
Ich weiß nicht was ich noch machen kann? Oder braucht der 415X ein anders Datenformat?
Vielleicht ist doch jemand hier der auch einen 415X hat und evtl. das gleiche Problem...hier der entsprechende Log-Auszug:
"Content-Length":191},"method":"post","url":"https://api.amc.husqvarna.dev/v1/mowers/xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx/calendar","data":"{"data":{"type":"calendar","attributes":{"tasks":
[{"start":540,"duration":360,"monday":true,"tuesday":true,"wednesday":false,"thursday":true,"friday":false,"saturday":true,"sunday":false}]}}}"}husqvarna-automower.0
2022-08-31 20:33:54.473 info This mower use missions and can not be updated by this endpoint Nothing set[onStateChange]: HTTP status response: 400; headers: {"content-type":"application/vnd.api+json","content-length":"201","connection":"close","date":"Wed, 31 Aug 2022 18:33:54 GMT","
x-amzn-requestid":"yyyyyyyy-yyyy-yyyy-yyyy-yyyyyyyyyyyy","x-amzn-remapped-content-length":"201","
x-amzn-remapped-connection":"keep-alive","
x-amz-apigw-id":"Xvdu7HYxDoEFmmw=","
x-amzn-remapped-date":"Wed, 31 Aug 2022 18:33:54 GMT","
x-cache":"Error from cloudfront","via":"1.1 969e7c67b62bdfae78f727a06e4512c2.cloudfront.net (CloudFront)","
x-amz-cf-pop":"TXL52-C1","x-amz-cf-id":"LPrXqGEaWud_7zyvx6nyYadgtVgNL2mEEuP0giMSJ73MA8MeNuzM7g=="}; data: {"errors":[{"id":"zzzzzzzz-zzzz-zzzz-zzzz-zzzzzzzzzzz","
status":"400","code":"illegal.argument","title":"Illegal argument","detail":"This mower use missions and can not be updated by this endpoint"}]} -
Alles erledigt, aber Werte ändern sich nur bei Neustart des Adapters. Selbst wenn der Mower unterwegs ist ändert sich nichts. Developer Acc hat ice987 für mich geprüft. Der ist iO angelegt und verknüpft.
Es handelt sich bei den Mower um den AM 415X mit neuster Firmware.
Im App werden die Daten ständig aktualisiert, im Adapter nur bei Neustart des Adapters.
js-controller ist jetzt 4.0.23 und node bei 16.
@kaschi68
Hallo Kaschi68,
ich habe gerade gelesen, daß du auch einen 415X hast. Ich habe ein Problem mit der Übertragung des Zeitplanes an den Mäher..
Hast du schon mal ausprobiert ob das bei dir funktioniert? Das würde mich sehr interessieren.
Gruß Gerhard -
@arnod
Hallo, habe jetzt nur den ersten timer stehen gelassen. Es erfolgt auch nur die entsprechende Ausgabe, welche zumindest die richtigen Werte beinhaltet. Es erfolgt aber wieder eine Fehlermeldung.
Ich weiß nicht was ich noch machen kann? Oder braucht der 415X ein anders Datenformat?
Vielleicht ist doch jemand hier der auch einen 415X hat und evtl. das gleiche Problem...hier der entsprechende Log-Auszug:
"Content-Length":191},"method":"post","url":"https://api.amc.husqvarna.dev/v1/mowers/xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx/calendar","data":"{"data":{"type":"calendar","attributes":{"tasks":
[{"start":540,"duration":360,"monday":true,"tuesday":true,"wednesday":false,"thursday":true,"friday":false,"saturday":true,"sunday":false}]}}}"}husqvarna-automower.0
2022-08-31 20:33:54.473 info This mower use missions and can not be updated by this endpoint Nothing set[onStateChange]: HTTP status response: 400; headers: {"content-type":"application/vnd.api+json","content-length":"201","connection":"close","date":"Wed, 31 Aug 2022 18:33:54 GMT","
x-amzn-requestid":"yyyyyyyy-yyyy-yyyy-yyyy-yyyyyyyyyyyy","x-amzn-remapped-content-length":"201","
x-amzn-remapped-connection":"keep-alive","
x-amz-apigw-id":"Xvdu7HYxDoEFmmw=","
x-amzn-remapped-date":"Wed, 31 Aug 2022 18:33:54 GMT","
x-cache":"Error from cloudfront","via":"1.1 969e7c67b62bdfae78f727a06e4512c2.cloudfront.net (CloudFront)","
x-amz-cf-pop":"TXL52-C1","x-amz-cf-id":"LPrXqGEaWud_7zyvx6nyYadgtVgNL2mEEuP0giMSJ73MA8MeNuzM7g=="}; data: {"errors":[{"id":"zzzzzzzz-zzzz-zzzz-zzzz-zzzzzzzzzzz","
status":"400","code":"illegal.argument","title":"Illegal argument","detail":"This mower use missions and can not be updated by this endpoint"}]}@ghifunk
Kann auch sein, dass dein Mäher das über die API nicht unterstützt.
Du kannst ja mal auf der Husqvarna API Seite mit deiner Mower ID direkt versuchen, ob das funktioniert.
Dazu einfach unter POST /mowers/{id}/calendar auf der Seite im Feld ID deine ID eintragen:
Husqvarna Connect API -
@kaschi68
Hallo Kaschi68,
ich habe gerade gelesen, daß du auch einen 415X hast. Ich habe ein Problem mit der Übertragung des Zeitplanes an den Mäher..
Hast du schon mal ausprobiert ob das bei dir funktioniert? Das würde mich sehr interessieren.
Gruß Gerhard@ghifunk
Hallo Gerhard, ich nutze den Mähplan aus dem Adapter nicht. Ich hatte ihn mal getestet, aber bei mir wurden die Mähzeiten (auch) nicht übertragen.
Dazu muss ich aber sagen das ich noch ein grösseres Problem hatte. Meine Objekte haben sich nur nach Adapter Neustart aktualisiert.
Heute den Fehler gefunden. Ist bisher nicht aufgefallen bei anderen Adaptern. Meine Ordner-Rechte müssen nicht gepasst haben. Nach dem Durchlaufen vom ioBroker Fixer wurden jetzt im Betrieb alle Objekte aktualisiert.
Den Mähplan organisiere ich anders, da mein Rolltor auf sein muss, bevor der Mower startet.
Ich starte und stoppe über den Adapter Zeitschaltuhr in VIS. Alles andere hat nicht geklappt, da es zu Verzögerungen mit den Statusmeldungen kommt und der Mower sonst das Rolltor einfährt.Gruß und schönen Abend,
Kaschi -
@ghifunk sagte in Test Adapter Husqvarna Automower v0.3.x:
@arnod
Jetzt sehe ich gerade, daß bei mir im Ordner unter dem Ordner schedule nochmal einer mit "0" angelegt ist...!!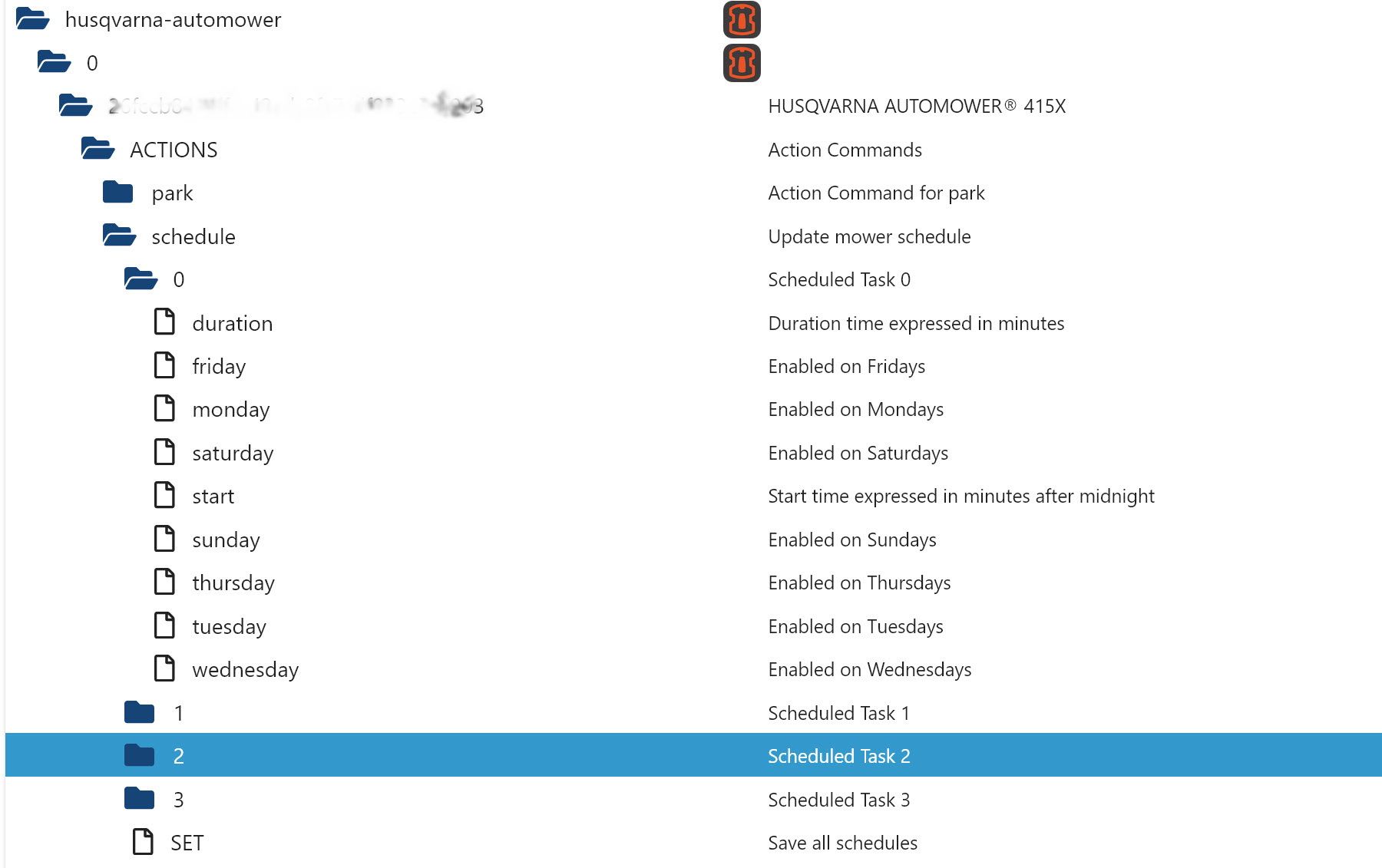
Da passt doch glaube ich was nicht?Das ist so in Ordnung.
Es sind vier Timer, die eingestellt werden können, von 0 bis 3. -
@arnod Ich bekomme bei irgendwie nur den Datenpunkt Distance from Charingstation angezeigt. Müssten das nicht mehr sein?
@lustig29
Welches Script verwendest du?
Das originale von Github oder das geänderte von mir?
Beim Script von Github wurden anscheinend alle Tageswerte entfernt, sei dem im Adapter die "Statistics" Werte hinzugefügt wurden.
Wenn ich mein Script optimiert habe, werde ich ice987987 mal fragen, ob er das auf seiner Github Seite verwenden will.Bei meinem Script, das ich ursprünglich von ice987987 übernommen habe, werden noch folgende Objekt ID's angelegt:
drivenDistanceToday
drivenDistanceTotal
chargingTimeToday
mowingTimeToday
GoogleMapsLinkEs werden auch ID's für die Timer angelegt und die Urzeit umgerechnet für die Adapter ID's
.calendar.0.durationund.calendar.0.start.Was noch nicht richtig funktioniert, ist die Berechnung der Ladezeiten und gefahrene Distanz.
-
@lustig29
Welches Script verwendest du?
Das originale von Github oder das geänderte von mir?
Beim Script von Github wurden anscheinend alle Tageswerte entfernt, sei dem im Adapter die "Statistics" Werte hinzugefügt wurden.
Wenn ich mein Script optimiert habe, werde ich ice987987 mal fragen, ob er das auf seiner Github Seite verwenden will.Bei meinem Script, das ich ursprünglich von ice987987 übernommen habe, werden noch folgende Objekt ID's angelegt:
drivenDistanceToday
drivenDistanceTotal
chargingTimeToday
mowingTimeToday
GoogleMapsLinkEs werden auch ID's für die Timer angelegt und die Urzeit umgerechnet für die Adapter ID's
.calendar.0.durationund.calendar.0.start.Was noch nicht richtig funktioniert, ist die Berechnung der Ladezeiten und gefahrene Distanz.
-
@lustig29
Kein Problem://*************************************************************************************************** //++++++++++++++++++++++++++++++++++++++++ USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++++ const instanz = '0_userdata.0.'; // Hier kann die Instanz angepasst werden const PfadEbene1 = 'Husqvarna.'; // Hier kann der Pfad angepasst werden const PfadEbene2 = ['Statistik.', 'Zeiten.', 'Allgemein.']; // Hier kann der Pfad angepasst werden const Mower_ID = 'xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx' // Mower ID vom Husqvarna Adapter const sID_Regensensor = 'hm-rpc.3.1.RAINING' // Pfad Regensensor true = Regen //++++++++++++++++++++++++++++++++++++++ ENDE USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++ //*************************************************************************************************** let drivenDistanceToday,drivenDistanceTotal,drivenDistance = 0,chargingTimeToday,chargingTimeTotal,chargingTime = 0,mowingTimeToday,mowingTimeTotal,mowingTime = 0; let chargingStationLatitude = 0,chargingStationLongitude = 0,distanceFromChargingStation = 0; // create required folders and states CreateState(); async function CreateState(){ for (let i = 0; i <= 3; i++) { createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Start Zeit ', desc: 'Start Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Ende Zeit ', desc: 'Ende Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); } await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday', 0, false, {name: 'Driven Distance Today', desc: 'Driven Distance Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal', 0, false, {name: 'Driven Distance Total', desc: 'Driven Distance Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday', 0, false, {name: 'Charging Time Today', desc: 'Charging Time Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday', 0, false, {name: 'Mowing Time Total', desc: 'Mowing Time Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation', 0, false, {name: 'Distance from charging station', desc: 'Distance from charging station', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'm'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink', '', false, {name: 'Link für Google Maps', desc: 'Link für Google Maps', role: 'value', type: 'string', read: true, write: true, def: ''}); log('-==== Alle Ordner und State wurden erstellt ====-') drivenDistanceToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday')).val; drivenDistanceTotal = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal')).val; chargingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday')).val; mowingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday')).val; } //******************************************************* Adapter Husqvarna-Automower *******************************************************/ const sID_Mower_activity = 'husqvarna-automower.0.' + Mower_ID + '.mower.activity' const sID_Latlong = 'husqvarna-automower.0.' + Mower_ID + '.positions.latlong' const sID_PARKUNTILNEXTSCHEDULE = 'husqvarna-automower.0.' + Mower_ID + '.ACTIONS.PARKUNTILNEXTSCHEDULE' const sID_MoverLatLong = 'husqvarna-automower.0.'+Mower_ID+'.positions.latlong' //************************************************************ Script Husqvarna *************************************************************/ const sID_drivenDistanceToday = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday'; const sID_drivenDistanceTotal = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal'; const sID_distanceFromChargingStation = instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation'; const sID_chargingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday'; const sID_mowingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday'; const sID_GoogleLink = instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink'; const sID_StartZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_0'; const sID_EndeZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_0'; const sID_StartZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_1'; const sID_EndeZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_1'; const sID_StartZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_2'; const sID_EndeZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_2'; const sID_StartZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_3'; const sID_EndeZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_3'; const arrayID_Zeiten =[sID_StartZeit_0,sID_EndeZeit_0,sID_StartZeit_1,sID_EndeZeit_1,sID_StartZeit_2,sID_EndeZeit_2,sID_StartZeit_3,sID_EndeZeit_3]; // reset variables "Today" every midnight schedule('0 0 * * *', function () { drivenDistanceToday = 0; setState(sID_drivenDistanceToday, drivenDistanceToday, true); chargingTimeToday = 0; setState(sID_chargingTimeToday, chargingTimeToday, true); mowingTimeToday = 0; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get chargingTimeToday and chargingTimeTotal on({id: sID_Mower_activity, oldVal: 'CHARGING'}, function (obj) { chargingTime = obj.state.ts - obj.oldState.ts; log('chargingTime: ' + chargingTime/1000 + 's', 'debug'); chargingTimeToday = chargingTime + chargingTimeToday; setState(sID_chargingTimeToday, chargingTimeToday, true); }); // get mowingTimeToday and mowingTimeTotal on({id: sID_Mower_activity, oldVal: 'MOWING'}, function (obj) { mowingTime = obj.state.ts - obj.oldState.ts; log('mowingTime: ' + mowingTime/1000 + 's', 'debug'); mowingTimeToday = mowingTime + mowingTimeToday; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get distance from automower to charging station, drivenDistanceToday and drivenDistanceTotal on({id: sID_Latlong, change: 'ne'}, async function (obj) { if (getState(sID_Mower_activity).val === 'CHARGING' || getState(sID_Mower_activity).val === 'PARKED_IN_CS') { if (chargingStationLatitude !== 0 && chargingStationLongitude !== 0) { chargingStationLatitude = (Number(obj.state.val.split(';')[0]) + Number(chargingStationLatitude)) / 2; chargingStationLongitude = (Number(obj.state.val.split(';')[1]) + Number(chargingStationLongitude)) / 2; } else { chargingStationLatitude = obj.state.val.split(';')[0]; chargingStationLongitude = obj.state.val.split(';')[1]; } } distanceFromChargingStation = 1000 * 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(chargingStationLatitude * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(chargingStationLatitude * (Math.PI / 180)) * Math.cos(chargingStationLongitude * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceFromChargingStation: ' + distanceFromChargingStation + 'm', 'debug'); await setStateAsync(sID_distanceFromChargingStation, distanceFromChargingStation, true); if (getState(sID_Mower_activity).val === 'MOWING' || getState(sID_Mower_activity).val === 'GOING_HOME' || getState(sID_Mower_activity).val === 'LEAVING') { drivenDistance = 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(obj.oldState.val.split(';')[0] * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[1] * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceDriven: ' + drivenDistance + 'km', 'debug'); drivenDistanceToday = drivenDistanceToday + drivenDistance; drivenDistanceTotal = drivenDistanceTotal + drivenDistance; await setStateAsync(sID_drivenDistanceToday, round(drivenDistanceToday,2), true); await setStateAsync(sID_drivenDistanceTotal, round(drivenDistanceTotal,2), true); } }); // Uhrzeiten für StartZeit und EndZeit in Minuten umrechnen und Adapter ID's ändern on({id: arrayID_Zeiten, change: 'ne'}, async function (obj) { let arryObj_ID = obj.id.split('.') let ScheduleNr = arryObj_ID[4].substring(arryObj_ID[4].length-1,arryObj_ID[4].length) let Dauer_min =0, Start_min=0; let StartZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+ScheduleNr)).val; let EndeZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+ScheduleNr)).val; // Uhrzeit wird in Stunden und Minuten geteilt let arrayStartZeit = StartZeit.split(":"); let arrayEndeZeit = EndeZeit.split(":"); let StartZeit_Stunden = arrayStartZeit[0]; let EndeZeit_Stunden = arrayEndeZeit[0]; let StartZeit_Minuten = arrayStartZeit[1]; let EndeZeit_Minuten = arrayEndeZeit[1]; // Umrechnen der Uhrzeit in Minuten seit Tagesbeginn Start_min = (StartZeit_Stunden *60)+ parseInt(StartZeit_Minuten) // Umrechnen der Uhrzeit in Minuten von Start bis Ende Zeit (Dauer) Dauer_min = ((EndeZeit_Stunden *60)+ parseInt(EndeZeit_Minuten))-Start_min if(Dauer_min <0){Dauer_min = 0;} await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.start',Start_min) await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.duration',Dauer_min) }); //Google Maps Link aktualisieren, wenn sich die Koordinaten ändern. on({id: sID_MoverLatLong, change: "ne"}, async function (obj) { let arryLatLong = getState(obj.id).val.split(';'); let GoogleLink = 'https://www.google.com/maps/place/'+arryLatLong[0]+','+arryLatLong[1]+'/@?hl=de'; await setStateAsync(sID_GoogleLink,GoogleLink); }); // Bei Regen Parken bis zum nächsten Start on({id: sID_Regensensor, change: 'ne', val: true}, async function (obj) { await setStateAsync(sID_PARKUNTILNEXTSCHEDULE,true); log('-==== Es regnet, Mäher wird geparkt ====-','warn') }); // Runden. Parameter float wert, int dez Anzahl der Stellen function round(wert, dez) { let umrechnungsfaktor = Math.pow(10,dez); return Math.round(wert * umrechnungsfaktor) / umrechnungsfaktor; } -
@lustig29
Kein Problem://*************************************************************************************************** //++++++++++++++++++++++++++++++++++++++++ USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++++ const instanz = '0_userdata.0.'; // Hier kann die Instanz angepasst werden const PfadEbene1 = 'Husqvarna.'; // Hier kann der Pfad angepasst werden const PfadEbene2 = ['Statistik.', 'Zeiten.', 'Allgemein.']; // Hier kann der Pfad angepasst werden const Mower_ID = 'xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx' // Mower ID vom Husqvarna Adapter const sID_Regensensor = 'hm-rpc.3.1.RAINING' // Pfad Regensensor true = Regen //++++++++++++++++++++++++++++++++++++++ ENDE USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++ //*************************************************************************************************** let drivenDistanceToday,drivenDistanceTotal,drivenDistance = 0,chargingTimeToday,chargingTimeTotal,chargingTime = 0,mowingTimeToday,mowingTimeTotal,mowingTime = 0; let chargingStationLatitude = 0,chargingStationLongitude = 0,distanceFromChargingStation = 0; // create required folders and states CreateState(); async function CreateState(){ for (let i = 0; i <= 3; i++) { createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Start Zeit ', desc: 'Start Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Ende Zeit ', desc: 'Ende Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); } await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday', 0, false, {name: 'Driven Distance Today', desc: 'Driven Distance Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal', 0, false, {name: 'Driven Distance Total', desc: 'Driven Distance Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday', 0, false, {name: 'Charging Time Today', desc: 'Charging Time Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday', 0, false, {name: 'Mowing Time Total', desc: 'Mowing Time Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation', 0, false, {name: 'Distance from charging station', desc: 'Distance from charging station', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'm'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink', '', false, {name: 'Link für Google Maps', desc: 'Link für Google Maps', role: 'value', type: 'string', read: true, write: true, def: ''}); log('-==== Alle Ordner und State wurden erstellt ====-') drivenDistanceToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday')).val; drivenDistanceTotal = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal')).val; chargingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday')).val; mowingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday')).val; } //******************************************************* Adapter Husqvarna-Automower *******************************************************/ const sID_Mower_activity = 'husqvarna-automower.0.' + Mower_ID + '.mower.activity' const sID_Latlong = 'husqvarna-automower.0.' + Mower_ID + '.positions.latlong' const sID_PARKUNTILNEXTSCHEDULE = 'husqvarna-automower.0.' + Mower_ID + '.ACTIONS.PARKUNTILNEXTSCHEDULE' const sID_MoverLatLong = 'husqvarna-automower.0.'+Mower_ID+'.positions.latlong' //************************************************************ Script Husqvarna *************************************************************/ const sID_drivenDistanceToday = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday'; const sID_drivenDistanceTotal = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal'; const sID_distanceFromChargingStation = instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation'; const sID_chargingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday'; const sID_mowingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday'; const sID_GoogleLink = instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink'; const sID_StartZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_0'; const sID_EndeZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_0'; const sID_StartZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_1'; const sID_EndeZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_1'; const sID_StartZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_2'; const sID_EndeZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_2'; const sID_StartZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_3'; const sID_EndeZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_3'; const arrayID_Zeiten =[sID_StartZeit_0,sID_EndeZeit_0,sID_StartZeit_1,sID_EndeZeit_1,sID_StartZeit_2,sID_EndeZeit_2,sID_StartZeit_3,sID_EndeZeit_3]; // reset variables "Today" every midnight schedule('0 0 * * *', function () { drivenDistanceToday = 0; setState(sID_drivenDistanceToday, drivenDistanceToday, true); chargingTimeToday = 0; setState(sID_chargingTimeToday, chargingTimeToday, true); mowingTimeToday = 0; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get chargingTimeToday and chargingTimeTotal on({id: sID_Mower_activity, oldVal: 'CHARGING'}, function (obj) { chargingTime = obj.state.ts - obj.oldState.ts; log('chargingTime: ' + chargingTime/1000 + 's', 'debug'); chargingTimeToday = chargingTime + chargingTimeToday; setState(sID_chargingTimeToday, chargingTimeToday, true); }); // get mowingTimeToday and mowingTimeTotal on({id: sID_Mower_activity, oldVal: 'MOWING'}, function (obj) { mowingTime = obj.state.ts - obj.oldState.ts; log('mowingTime: ' + mowingTime/1000 + 's', 'debug'); mowingTimeToday = mowingTime + mowingTimeToday; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get distance from automower to charging station, drivenDistanceToday and drivenDistanceTotal on({id: sID_Latlong, change: 'ne'}, async function (obj) { if (getState(sID_Mower_activity).val === 'CHARGING' || getState(sID_Mower_activity).val === 'PARKED_IN_CS') { if (chargingStationLatitude !== 0 && chargingStationLongitude !== 0) { chargingStationLatitude = (Number(obj.state.val.split(';')[0]) + Number(chargingStationLatitude)) / 2; chargingStationLongitude = (Number(obj.state.val.split(';')[1]) + Number(chargingStationLongitude)) / 2; } else { chargingStationLatitude = obj.state.val.split(';')[0]; chargingStationLongitude = obj.state.val.split(';')[1]; } } distanceFromChargingStation = 1000 * 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(chargingStationLatitude * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(chargingStationLatitude * (Math.PI / 180)) * Math.cos(chargingStationLongitude * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceFromChargingStation: ' + distanceFromChargingStation + 'm', 'debug'); await setStateAsync(sID_distanceFromChargingStation, distanceFromChargingStation, true); if (getState(sID_Mower_activity).val === 'MOWING' || getState(sID_Mower_activity).val === 'GOING_HOME' || getState(sID_Mower_activity).val === 'LEAVING') { drivenDistance = 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(obj.oldState.val.split(';')[0] * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[1] * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceDriven: ' + drivenDistance + 'km', 'debug'); drivenDistanceToday = drivenDistanceToday + drivenDistance; drivenDistanceTotal = drivenDistanceTotal + drivenDistance; await setStateAsync(sID_drivenDistanceToday, round(drivenDistanceToday,2), true); await setStateAsync(sID_drivenDistanceTotal, round(drivenDistanceTotal,2), true); } }); // Uhrzeiten für StartZeit und EndZeit in Minuten umrechnen und Adapter ID's ändern on({id: arrayID_Zeiten, change: 'ne'}, async function (obj) { let arryObj_ID = obj.id.split('.') let ScheduleNr = arryObj_ID[4].substring(arryObj_ID[4].length-1,arryObj_ID[4].length) let Dauer_min =0, Start_min=0; let StartZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+ScheduleNr)).val; let EndeZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+ScheduleNr)).val; // Uhrzeit wird in Stunden und Minuten geteilt let arrayStartZeit = StartZeit.split(":"); let arrayEndeZeit = EndeZeit.split(":"); let StartZeit_Stunden = arrayStartZeit[0]; let EndeZeit_Stunden = arrayEndeZeit[0]; let StartZeit_Minuten = arrayStartZeit[1]; let EndeZeit_Minuten = arrayEndeZeit[1]; // Umrechnen der Uhrzeit in Minuten seit Tagesbeginn Start_min = (StartZeit_Stunden *60)+ parseInt(StartZeit_Minuten) // Umrechnen der Uhrzeit in Minuten von Start bis Ende Zeit (Dauer) Dauer_min = ((EndeZeit_Stunden *60)+ parseInt(EndeZeit_Minuten))-Start_min if(Dauer_min <0){Dauer_min = 0;} await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.start',Start_min) await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.duration',Dauer_min) }); //Google Maps Link aktualisieren, wenn sich die Koordinaten ändern. on({id: sID_MoverLatLong, change: "ne"}, async function (obj) { let arryLatLong = getState(obj.id).val.split(';'); let GoogleLink = 'https://www.google.com/maps/place/'+arryLatLong[0]+','+arryLatLong[1]+'/@?hl=de'; await setStateAsync(sID_GoogleLink,GoogleLink); }); // Bei Regen Parken bis zum nächsten Start on({id: sID_Regensensor, change: 'ne', val: true}, async function (obj) { await setStateAsync(sID_PARKUNTILNEXTSCHEDULE,true); log('-==== Es regnet, Mäher wird geparkt ====-','warn') }); // Runden. Parameter float wert, int dez Anzahl der Stellen function round(wert, dez) { let umrechnungsfaktor = Math.pow(10,dez); return Math.round(wert * umrechnungsfaktor) / umrechnungsfaktor; } -
@lustig29
Kein Problem://*************************************************************************************************** //++++++++++++++++++++++++++++++++++++++++ USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++++ const instanz = '0_userdata.0.'; // Hier kann die Instanz angepasst werden const PfadEbene1 = 'Husqvarna.'; // Hier kann der Pfad angepasst werden const PfadEbene2 = ['Statistik.', 'Zeiten.', 'Allgemein.']; // Hier kann der Pfad angepasst werden const Mower_ID = 'xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx' // Mower ID vom Husqvarna Adapter const sID_Regensensor = 'hm-rpc.3.1.RAINING' // Pfad Regensensor true = Regen //++++++++++++++++++++++++++++++++++++++ ENDE USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++ //*************************************************************************************************** let drivenDistanceToday,drivenDistanceTotal,drivenDistance = 0,chargingTimeToday,chargingTimeTotal,chargingTime = 0,mowingTimeToday,mowingTimeTotal,mowingTime = 0; let chargingStationLatitude = 0,chargingStationLongitude = 0,distanceFromChargingStation = 0; // create required folders and states CreateState(); async function CreateState(){ for (let i = 0; i <= 3; i++) { createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Start Zeit ', desc: 'Start Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Ende Zeit ', desc: 'Ende Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); } await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday', 0, false, {name: 'Driven Distance Today', desc: 'Driven Distance Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal', 0, false, {name: 'Driven Distance Total', desc: 'Driven Distance Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday', 0, false, {name: 'Charging Time Today', desc: 'Charging Time Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday', 0, false, {name: 'Mowing Time Total', desc: 'Mowing Time Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation', 0, false, {name: 'Distance from charging station', desc: 'Distance from charging station', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'm'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink', '', false, {name: 'Link für Google Maps', desc: 'Link für Google Maps', role: 'value', type: 'string', read: true, write: true, def: ''}); log('-==== Alle Ordner und State wurden erstellt ====-') drivenDistanceToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday')).val; drivenDistanceTotal = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal')).val; chargingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday')).val; mowingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday')).val; } //******************************************************* Adapter Husqvarna-Automower *******************************************************/ const sID_Mower_activity = 'husqvarna-automower.0.' + Mower_ID + '.mower.activity' const sID_Latlong = 'husqvarna-automower.0.' + Mower_ID + '.positions.latlong' const sID_PARKUNTILNEXTSCHEDULE = 'husqvarna-automower.0.' + Mower_ID + '.ACTIONS.PARKUNTILNEXTSCHEDULE' const sID_MoverLatLong = 'husqvarna-automower.0.'+Mower_ID+'.positions.latlong' //************************************************************ Script Husqvarna *************************************************************/ const sID_drivenDistanceToday = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday'; const sID_drivenDistanceTotal = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal'; const sID_distanceFromChargingStation = instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation'; const sID_chargingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday'; const sID_mowingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday'; const sID_GoogleLink = instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink'; const sID_StartZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_0'; const sID_EndeZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_0'; const sID_StartZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_1'; const sID_EndeZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_1'; const sID_StartZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_2'; const sID_EndeZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_2'; const sID_StartZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_3'; const sID_EndeZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_3'; const arrayID_Zeiten =[sID_StartZeit_0,sID_EndeZeit_0,sID_StartZeit_1,sID_EndeZeit_1,sID_StartZeit_2,sID_EndeZeit_2,sID_StartZeit_3,sID_EndeZeit_3]; // reset variables "Today" every midnight schedule('0 0 * * *', function () { drivenDistanceToday = 0; setState(sID_drivenDistanceToday, drivenDistanceToday, true); chargingTimeToday = 0; setState(sID_chargingTimeToday, chargingTimeToday, true); mowingTimeToday = 0; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get chargingTimeToday and chargingTimeTotal on({id: sID_Mower_activity, oldVal: 'CHARGING'}, function (obj) { chargingTime = obj.state.ts - obj.oldState.ts; log('chargingTime: ' + chargingTime/1000 + 's', 'debug'); chargingTimeToday = chargingTime + chargingTimeToday; setState(sID_chargingTimeToday, chargingTimeToday, true); }); // get mowingTimeToday and mowingTimeTotal on({id: sID_Mower_activity, oldVal: 'MOWING'}, function (obj) { mowingTime = obj.state.ts - obj.oldState.ts; log('mowingTime: ' + mowingTime/1000 + 's', 'debug'); mowingTimeToday = mowingTime + mowingTimeToday; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get distance from automower to charging station, drivenDistanceToday and drivenDistanceTotal on({id: sID_Latlong, change: 'ne'}, async function (obj) { if (getState(sID_Mower_activity).val === 'CHARGING' || getState(sID_Mower_activity).val === 'PARKED_IN_CS') { if (chargingStationLatitude !== 0 && chargingStationLongitude !== 0) { chargingStationLatitude = (Number(obj.state.val.split(';')[0]) + Number(chargingStationLatitude)) / 2; chargingStationLongitude = (Number(obj.state.val.split(';')[1]) + Number(chargingStationLongitude)) / 2; } else { chargingStationLatitude = obj.state.val.split(';')[0]; chargingStationLongitude = obj.state.val.split(';')[1]; } } distanceFromChargingStation = 1000 * 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(chargingStationLatitude * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(chargingStationLatitude * (Math.PI / 180)) * Math.cos(chargingStationLongitude * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceFromChargingStation: ' + distanceFromChargingStation + 'm', 'debug'); await setStateAsync(sID_distanceFromChargingStation, distanceFromChargingStation, true); if (getState(sID_Mower_activity).val === 'MOWING' || getState(sID_Mower_activity).val === 'GOING_HOME' || getState(sID_Mower_activity).val === 'LEAVING') { drivenDistance = 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(obj.oldState.val.split(';')[0] * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[1] * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceDriven: ' + drivenDistance + 'km', 'debug'); drivenDistanceToday = drivenDistanceToday + drivenDistance; drivenDistanceTotal = drivenDistanceTotal + drivenDistance; await setStateAsync(sID_drivenDistanceToday, round(drivenDistanceToday,2), true); await setStateAsync(sID_drivenDistanceTotal, round(drivenDistanceTotal,2), true); } }); // Uhrzeiten für StartZeit und EndZeit in Minuten umrechnen und Adapter ID's ändern on({id: arrayID_Zeiten, change: 'ne'}, async function (obj) { let arryObj_ID = obj.id.split('.') let ScheduleNr = arryObj_ID[4].substring(arryObj_ID[4].length-1,arryObj_ID[4].length) let Dauer_min =0, Start_min=0; let StartZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+ScheduleNr)).val; let EndeZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+ScheduleNr)).val; // Uhrzeit wird in Stunden und Minuten geteilt let arrayStartZeit = StartZeit.split(":"); let arrayEndeZeit = EndeZeit.split(":"); let StartZeit_Stunden = arrayStartZeit[0]; let EndeZeit_Stunden = arrayEndeZeit[0]; let StartZeit_Minuten = arrayStartZeit[1]; let EndeZeit_Minuten = arrayEndeZeit[1]; // Umrechnen der Uhrzeit in Minuten seit Tagesbeginn Start_min = (StartZeit_Stunden *60)+ parseInt(StartZeit_Minuten) // Umrechnen der Uhrzeit in Minuten von Start bis Ende Zeit (Dauer) Dauer_min = ((EndeZeit_Stunden *60)+ parseInt(EndeZeit_Minuten))-Start_min if(Dauer_min <0){Dauer_min = 0;} await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.start',Start_min) await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.duration',Dauer_min) }); //Google Maps Link aktualisieren, wenn sich die Koordinaten ändern. on({id: sID_MoverLatLong, change: "ne"}, async function (obj) { let arryLatLong = getState(obj.id).val.split(';'); let GoogleLink = 'https://www.google.com/maps/place/'+arryLatLong[0]+','+arryLatLong[1]+'/@?hl=de'; await setStateAsync(sID_GoogleLink,GoogleLink); }); // Bei Regen Parken bis zum nächsten Start on({id: sID_Regensensor, change: 'ne', val: true}, async function (obj) { await setStateAsync(sID_PARKUNTILNEXTSCHEDULE,true); log('-==== Es regnet, Mäher wird geparkt ====-','warn') }); // Runden. Parameter float wert, int dez Anzahl der Stellen function round(wert, dez) { let umrechnungsfaktor = Math.pow(10,dez); return Math.round(wert * umrechnungsfaktor) / umrechnungsfaktor; }@arnod said in Test Adapter Husqvarna Automower v0.3.x:
//*************************************************************************************************** //++++++++++++++++++++++++++++++++++++++++ USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++++ const instanz = '0_userdata.0.'; // Hier kann die Instanz angepasst werden const PfadEbene1 = 'Husqvarna.'; // Hier kann der Pfad angepasst werden const PfadEbene2 = ['Statistik.', 'Zeiten.', 'Allgemein.']; // Hier kann der Pfad angepasst werden const Mower_ID = 'xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx' // Mower ID vom Husqvarna Adapter const sID_Regensensor = 'hm-rpc.3.1.RAINING' // Pfad Regensensor true = Regen //++++++++++++++++++++++++++++++++++++++ ENDE USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++ //*************************************************************************************************** let drivenDistanceToday,drivenDistanceTotal,drivenDistance = 0,chargingTimeToday,chargingTimeTotal,chargingTime = 0,mowingTimeToday,mowingTimeTotal,mowingTime = 0; let chargingStationLatitude = 0,chargingStationLongitude = 0,distanceFromChargingStation = 0; // create required folders and states CreateState(); async function CreateState(){ for (let i = 0; i <= 3; i++) { createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Start Zeit ', desc: 'Start Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Ende Zeit ', desc: 'Ende Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); } await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday', 0, false, {name: 'Driven Distance Today', desc: 'Driven Distance Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal', 0, false, {name: 'Driven Distance Total', desc: 'Driven Distance Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday', 0, false, {name: 'Charging Time Today', desc: 'Charging Time Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday', 0, false, {name: 'Mowing Time Total', desc: 'Mowing Time Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation', 0, false, {name: 'Distance from charging station', desc: 'Distance from charging station', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'm'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink', '', false, {name: 'Link für Google Maps', desc: 'Link für Google Maps', role: 'value', type: 'string', read: true, write: true, def: ''}); log('-==== Alle Ordner und State wurden erstellt ====-') drivenDistanceToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday')).val; drivenDistanceTotal = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal')).val; chargingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday')).val; mowingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday')).val; } //******************************************************* Adapter Husqvarna-Automower *******************************************************/ const sID_Mower_activity = 'husqvarna-automower.0.' + Mower_ID + '.mower.activity' const sID_Latlong = 'husqvarna-automower.0.' + Mower_ID + '.positions.latlong' const sID_PARKUNTILNEXTSCHEDULE = 'husqvarna-automower.0.' + Mower_ID + '.ACTIONS.PARKUNTILNEXTSCHEDULE' const sID_MoverLatLong = 'husqvarna-automower.0.'+Mower_ID+'.positions.latlong' //************************************************************ Script Husqvarna *************************************************************/ const sID_drivenDistanceToday = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday'; const sID_drivenDistanceTotal = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal'; const sID_distanceFromChargingStation = instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation'; const sID_chargingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday'; const sID_mowingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday'; const sID_GoogleLink = instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink'; const sID_StartZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_0'; const sID_EndeZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_0'; const sID_StartZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_1'; const sID_EndeZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_1'; const sID_StartZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_2'; const sID_EndeZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_2'; const sID_StartZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_3'; const sID_EndeZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_3'; const arrayID_Zeiten =[sID_StartZeit_0,sID_EndeZeit_0,sID_StartZeit_1,sID_EndeZeit_1,sID_StartZeit_2,sID_EndeZeit_2,sID_StartZeit_3,sID_EndeZeit_3]; // reset variables "Today" every midnight schedule('0 0 * * *', function () { drivenDistanceToday = 0; setState(sID_drivenDistanceToday, drivenDistanceToday, true); chargingTimeToday = 0; setState(sID_chargingTimeToday, chargingTimeToday, true); mowingTimeToday = 0; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get chargingTimeToday and chargingTimeTotal on({id: sID_Mower_activity, oldVal: 'CHARGING'}, function (obj) { chargingTime = obj.state.ts - obj.oldState.ts; log('chargingTime: ' + chargingTime/1000 + 's', 'debug'); chargingTimeToday = chargingTime + chargingTimeToday; setState(sID_chargingTimeToday, chargingTimeToday, true); }); // get mowingTimeToday and mowingTimeTotal on({id: sID_Mower_activity, oldVal: 'MOWING'}, function (obj) { mowingTime = obj.state.ts - obj.oldState.ts; log('mowingTime: ' + mowingTime/1000 + 's', 'debug'); mowingTimeToday = mowingTime + mowingTimeToday; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get distance from automower to charging station, drivenDistanceToday and drivenDistanceTotal on({id: sID_Latlong, change: 'ne'}, async function (obj) { if (getState(sID_Mower_activity).val === 'CHARGING' || getState(sID_Mower_activity).val === 'PARKED_IN_CS') { if (chargingStationLatitude !== 0 && chargingStationLongitude !== 0) { chargingStationLatitude = (Number(obj.state.val.split(';')[0]) + Number(chargingStationLatitude)) / 2; chargingStationLongitude = (Number(obj.state.val.split(';')[1]) + Number(chargingStationLongitude)) / 2; } else { chargingStationLatitude = obj.state.val.split(';')[0]; chargingStationLongitude = obj.state.val.split(';')[1]; } } distanceFromChargingStation = 1000 * 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(chargingStationLatitude * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(chargingStationLatitude * (Math.PI / 180)) * Math.cos(chargingStationLongitude * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceFromChargingStation: ' + distanceFromChargingStation + 'm', 'debug'); await setStateAsync(sID_distanceFromChargingStation, distanceFromChargingStation, true); if (getState(sID_Mower_activity).val === 'MOWING' || getState(sID_Mower_activity).val === 'GOING_HOME' || getState(sID_Mower_activity).val === 'LEAVING') { drivenDistance = 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(obj.oldState.val.split(';')[0] * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[1] * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceDriven: ' + drivenDistance + 'km', 'debug'); drivenDistanceToday = drivenDistanceToday + drivenDistance; drivenDistanceTotal = drivenDistanceTotal + drivenDistance; await setStateAsync(sID_drivenDistanceToday, round(drivenDistanceToday,2), true); await setStateAsync(sID_drivenDistanceTotal, round(drivenDistanceTotal,2), true); } }); // Uhrzeiten für StartZeit und EndZeit in Minuten umrechnen und Adapter ID's ändern on({id: arrayID_Zeiten, change: 'ne'}, async function (obj) { let arryObj_ID = obj.id.split('.') let ScheduleNr = arryObj_ID[4].substring(arryObj_ID[4].length-1,arryObj_ID[4].length) let Dauer_min =0, Start_min=0; let StartZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+ScheduleNr)).val; let EndeZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+ScheduleNr)).val; // Uhrzeit wird in Stunden und Minuten geteilt let arrayStartZeit = StartZeit.split(":"); let arrayEndeZeit = EndeZeit.split(":"); let StartZeit_Stunden = arrayStartZeit[0]; let EndeZeit_Stunden = arrayEndeZeit[0]; let StartZeit_Minuten = arrayStartZeit[1]; let EndeZeit_Minuten = arrayEndeZeit[1]; // Umrechnen der Uhrzeit in Minuten seit Tagesbeginn Start_min = (StartZeit_Stunden *60)+ parseInt(StartZeit_Minuten) // Umrechnen der Uhrzeit in Minuten von Start bis Ende Zeit (Dauer) Dauer_min = ((EndeZeit_Stunden *60)+ parseInt(EndeZeit_Minuten))-Start_min if(Dauer_min <0){Dauer_min = 0;} await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.start',Start_min) await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.duration',Dauer_min) }); //Google Maps Link aktualisieren, wenn sich die Koordinaten ändern. on({id: sID_MoverLatLong, change: "ne"}, async function (obj) { let arryLatLong = getState(obj.id).val.split(';'); let GoogleLink = 'https://www.google.com/maps/place/'+arryLatLong[0]+','+arryLatLong[1]+'/@?hl=de'; await setStateAsync(sID_GoogleLink,GoogleLink); }); // Bei Regen Parken bis zum nächsten Start on({id: sID_Regensensor, change: 'ne', val: true}, async function (obj) { await setStateAsync(sID_PARKUNTILNEXTSCHEDULE,true); log('-==== Es regnet, Mäher wird geparkt ====-','warn') }); // Runden. Parameter float wert, int dez Anzahl der Stellen function round(wert, dez) { let umrechnungsfaktor = Math.pow(10,dez); return Math.round(wert * umrechnungsfaktor) / umrechnungsfaktor; }Nochmal danke für dein Skript. Hat auch funktioniert. Datenpunkte wurden agelegt. Aber leider sind sie nicht beschrieben wurden. Muss ich in dem Skript ausser der Mover Id noch was eingeben?
-
@arnod said in Test Adapter Husqvarna Automower v0.3.x:
//*************************************************************************************************** //++++++++++++++++++++++++++++++++++++++++ USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++++ const instanz = '0_userdata.0.'; // Hier kann die Instanz angepasst werden const PfadEbene1 = 'Husqvarna.'; // Hier kann der Pfad angepasst werden const PfadEbene2 = ['Statistik.', 'Zeiten.', 'Allgemein.']; // Hier kann der Pfad angepasst werden const Mower_ID = 'xxxxxxxx-xxxx-xxxx-xxxx-xxxxxxxxxxxx' // Mower ID vom Husqvarna Adapter const sID_Regensensor = 'hm-rpc.3.1.RAINING' // Pfad Regensensor true = Regen //++++++++++++++++++++++++++++++++++++++ ENDE USER ANPASSUNGEN ++++++++++++++++++++++++++++++++++++++ //*************************************************************************************************** let drivenDistanceToday,drivenDistanceTotal,drivenDistance = 0,chargingTimeToday,chargingTimeTotal,chargingTime = 0,mowingTimeToday,mowingTimeTotal,mowingTime = 0; let chargingStationLatitude = 0,chargingStationLongitude = 0,distanceFromChargingStation = 0; // create required folders and states CreateState(); async function CreateState(){ for (let i = 0; i <= 3; i++) { createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Start Zeit ', desc: 'Start Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); createStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+i, '00:00', false, {name: 'Schedule '+i+' Ende Zeit ', desc: 'Ende Zeit Timer '+i, role: 'value', type: 'string', read: true, write: true, def: '00:00', unit: 'Uhr'}); } await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday', 0, false, {name: 'Driven Distance Today', desc: 'Driven Distance Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal', 0, false, {name: 'Driven Distance Total', desc: 'Driven Distance Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'km'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday', 0, false, {name: 'Charging Time Today', desc: 'Charging Time Today', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday', 0, false, {name: 'Mowing Time Total', desc: 'Mowing Time Total', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'ms'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation', 0, false, {name: 'Distance from charging station', desc: 'Distance from charging station', role: 'state', type: 'number', read: true, write: true, def: 0, unit: 'm'}); await createStateAsync(instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink', '', false, {name: 'Link für Google Maps', desc: 'Link für Google Maps', role: 'value', type: 'string', read: true, write: true, def: ''}); log('-==== Alle Ordner und State wurden erstellt ====-') drivenDistanceToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday')).val; drivenDistanceTotal = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal')).val; chargingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday')).val; mowingTimeToday = (await getStateAsync(instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday')).val; } //******************************************************* Adapter Husqvarna-Automower *******************************************************/ const sID_Mower_activity = 'husqvarna-automower.0.' + Mower_ID + '.mower.activity' const sID_Latlong = 'husqvarna-automower.0.' + Mower_ID + '.positions.latlong' const sID_PARKUNTILNEXTSCHEDULE = 'husqvarna-automower.0.' + Mower_ID + '.ACTIONS.PARKUNTILNEXTSCHEDULE' const sID_MoverLatLong = 'husqvarna-automower.0.'+Mower_ID+'.positions.latlong' //************************************************************ Script Husqvarna *************************************************************/ const sID_drivenDistanceToday = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceToday'; const sID_drivenDistanceTotal = instanz + PfadEbene1 + PfadEbene2[0] + 'drivenDistanceTotal'; const sID_distanceFromChargingStation = instanz + PfadEbene1 + PfadEbene2[0] + 'distanceFromChargingStation'; const sID_chargingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'chargingTimeToday'; const sID_mowingTimeToday = instanz + PfadEbene1 + PfadEbene2[0] + 'mowingTimeToday'; const sID_GoogleLink = instanz + PfadEbene1 + PfadEbene2[2] + 'GoogleMapsLink'; const sID_StartZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_0'; const sID_EndeZeit_0 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_0'; const sID_StartZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_1'; const sID_EndeZeit_1 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_1'; const sID_StartZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_2'; const sID_EndeZeit_2 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_2'; const sID_StartZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_3'; const sID_EndeZeit_3 = instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_3'; const arrayID_Zeiten =[sID_StartZeit_0,sID_EndeZeit_0,sID_StartZeit_1,sID_EndeZeit_1,sID_StartZeit_2,sID_EndeZeit_2,sID_StartZeit_3,sID_EndeZeit_3]; // reset variables "Today" every midnight schedule('0 0 * * *', function () { drivenDistanceToday = 0; setState(sID_drivenDistanceToday, drivenDistanceToday, true); chargingTimeToday = 0; setState(sID_chargingTimeToday, chargingTimeToday, true); mowingTimeToday = 0; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get chargingTimeToday and chargingTimeTotal on({id: sID_Mower_activity, oldVal: 'CHARGING'}, function (obj) { chargingTime = obj.state.ts - obj.oldState.ts; log('chargingTime: ' + chargingTime/1000 + 's', 'debug'); chargingTimeToday = chargingTime + chargingTimeToday; setState(sID_chargingTimeToday, chargingTimeToday, true); }); // get mowingTimeToday and mowingTimeTotal on({id: sID_Mower_activity, oldVal: 'MOWING'}, function (obj) { mowingTime = obj.state.ts - obj.oldState.ts; log('mowingTime: ' + mowingTime/1000 + 's', 'debug'); mowingTimeToday = mowingTime + mowingTimeToday; setState(sID_mowingTimeToday, mowingTimeToday, true); }); // get distance from automower to charging station, drivenDistanceToday and drivenDistanceTotal on({id: sID_Latlong, change: 'ne'}, async function (obj) { if (getState(sID_Mower_activity).val === 'CHARGING' || getState(sID_Mower_activity).val === 'PARKED_IN_CS') { if (chargingStationLatitude !== 0 && chargingStationLongitude !== 0) { chargingStationLatitude = (Number(obj.state.val.split(';')[0]) + Number(chargingStationLatitude)) / 2; chargingStationLongitude = (Number(obj.state.val.split(';')[1]) + Number(chargingStationLongitude)) / 2; } else { chargingStationLatitude = obj.state.val.split(';')[0]; chargingStationLongitude = obj.state.val.split(';')[1]; } } distanceFromChargingStation = 1000 * 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(chargingStationLatitude * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(chargingStationLatitude * (Math.PI / 180)) * Math.cos(chargingStationLongitude * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceFromChargingStation: ' + distanceFromChargingStation + 'm', 'debug'); await setStateAsync(sID_distanceFromChargingStation, distanceFromChargingStation, true); if (getState(sID_Mower_activity).val === 'MOWING' || getState(sID_Mower_activity).val === 'GOING_HOME' || getState(sID_Mower_activity).val === 'LEAVING') { drivenDistance = 6378.388 * Math.acos(Math.sin(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.sin(obj.oldState.val.split(';')[0] * (Math.PI / 180)) + Math.cos(obj.state.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[0] * (Math.PI / 180)) * Math.cos(obj.oldState.val.split(';')[1] * (Math.PI / 180) - obj.state.val.split(';')[1] * (Math.PI / 180))); // reference: https://www.kompf.de/gps/distcalc.html log('distanceDriven: ' + drivenDistance + 'km', 'debug'); drivenDistanceToday = drivenDistanceToday + drivenDistance; drivenDistanceTotal = drivenDistanceTotal + drivenDistance; await setStateAsync(sID_drivenDistanceToday, round(drivenDistanceToday,2), true); await setStateAsync(sID_drivenDistanceTotal, round(drivenDistanceTotal,2), true); } }); // Uhrzeiten für StartZeit und EndZeit in Minuten umrechnen und Adapter ID's ändern on({id: arrayID_Zeiten, change: 'ne'}, async function (obj) { let arryObj_ID = obj.id.split('.') let ScheduleNr = arryObj_ID[4].substring(arryObj_ID[4].length-1,arryObj_ID[4].length) let Dauer_min =0, Start_min=0; let StartZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'StartZeit_'+ScheduleNr)).val; let EndeZeit=(await getStateAsync(instanz + PfadEbene1 + PfadEbene2[1] + 'EndZeit_'+ScheduleNr)).val; // Uhrzeit wird in Stunden und Minuten geteilt let arrayStartZeit = StartZeit.split(":"); let arrayEndeZeit = EndeZeit.split(":"); let StartZeit_Stunden = arrayStartZeit[0]; let EndeZeit_Stunden = arrayEndeZeit[0]; let StartZeit_Minuten = arrayStartZeit[1]; let EndeZeit_Minuten = arrayEndeZeit[1]; // Umrechnen der Uhrzeit in Minuten seit Tagesbeginn Start_min = (StartZeit_Stunden *60)+ parseInt(StartZeit_Minuten) // Umrechnen der Uhrzeit in Minuten von Start bis Ende Zeit (Dauer) Dauer_min = ((EndeZeit_Stunden *60)+ parseInt(EndeZeit_Minuten))-Start_min if(Dauer_min <0){Dauer_min = 0;} await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.start',Start_min) await setStateAsync('husqvarna-automower.0.' + Mower_ID + '.ACTIONS.schedule.'+ScheduleNr+'.duration',Dauer_min) }); //Google Maps Link aktualisieren, wenn sich die Koordinaten ändern. on({id: sID_MoverLatLong, change: "ne"}, async function (obj) { let arryLatLong = getState(obj.id).val.split(';'); let GoogleLink = 'https://www.google.com/maps/place/'+arryLatLong[0]+','+arryLatLong[1]+'/@?hl=de'; await setStateAsync(sID_GoogleLink,GoogleLink); }); // Bei Regen Parken bis zum nächsten Start on({id: sID_Regensensor, change: 'ne', val: true}, async function (obj) { await setStateAsync(sID_PARKUNTILNEXTSCHEDULE,true); log('-==== Es regnet, Mäher wird geparkt ====-','warn') }); // Runden. Parameter float wert, int dez Anzahl der Stellen function round(wert, dez) { let umrechnungsfaktor = Math.pow(10,dez); return Math.round(wert * umrechnungsfaktor) / umrechnungsfaktor; }Nochmal danke für dein Skript. Hat auch funktioniert. Datenpunkte wurden agelegt. Aber leider sind sie nicht beschrieben wurden. Muss ich in dem Skript ausser der Mover Id noch was eingeben?
@lustig29
Eigentlich nicht, außer der Adapter Husqvarna hat bei dir eine andere Instanz als 0, dann musst du das noch bei//******************************************************* Adapter Husqvarna-Automower *******************************************************/Einstellen und
husqvarna-automower.0.inhusqvarna-automower.1.ändern. -
Möchte euch meinen ersten Adapter vorstellen. Die Idee, mein Skript vom Vorjahr mal schnell in einen Adapter zu transferieren, hat sich dann doch schnell als größere Aufgabe mit Missverständnissen und viel Lesen herausgestellt. Danke auch an die Unterstützer, als mich die Blindheit schlug.
Ich habe den Adapter jetzt mit 2 Mähern im produktiven Einsatz.
Voraussetzung ist ein Automower mit Connectmodul und ein Konto bei Husqvarna, welches auch für die Nutzung der Handy-App benötigt wird.
Ich habe mir ein spezielles Konto für ioBroker angelegt und die Mäher hinzugefügt, weil es des öfteren vor kam, dass ich in der Handy-App abgemeldet war, was aber auch an meinen vielen Tests mit an- und abmelden gelegen haben kann.
Zu finden ist der Adapter unter https://github.com/truegreyhound/ioBrok … -automower
Ich hoffe, ich habe die Vorgaben der Adapter-Entwicklung eingehalten. Habe aber nicht so ganz verstanden, was der Unterschied zwischen index.html und index_m.html sein soll. Alter/neuer ioBroker.admin?
Final müssten wohl auch noch einige Übersetzungen in word.js ergänzt werden, englisch und deutsch ist zumindest enthalten.
Bei bestimmten Ereignissen werden speziell formatierte Nachrichten in den State mower.sendMessage geschrieben. Ggf. kann das intelligenter gelöst werden. In meinem Skript habe ich an den Stellen prioritätsabhängig Messages via Telegram versendet. Diese Funktionalität bilde ich nun mit einem kleinen Skript mit einer Subscription auf diesen State nach.
Über Kritik, Anregungen und Fehlermeldungen werde ich gern hinwegsehen. :shock: ;)
Ne, bin ich gespannt und offen.
Bin gerade an der Überarbeitung meiner Views, werde demnächst ein paar Screenshots reinstellen.
Gruß
GH
Hi,
ich wollte das Modul in Betrieb nehmen, leider kommt diese Fehlermeldung.updateStatus mower object is NULLKann mir jemand sagen, was das sein könnte?
VG
Schmidti -
Hallo,
ich würde gerne den Adapter "husqvarna-automower v0.3.3-beta.1"
mit unserem Husqvarna Automower 405x "Firmware 5995776-12D_P16-SwPkg_47.11 (2023-03)" in Betrieb nehmen.Der verwendete iobroker ist in folgender Version vorhanden:
iobroker Admin v6.3.5
Node.js: v16.18.1
NPM: 8.19.2Einen Application-Key und ein Application-Secret habe ich mir bei developer.husqvarana.com erstellt.
Die Instanz wird gestartet und scheint auch Daten abzurufen, allerdings bleibt der Status der Instanz immer bei einem
gelben Ausrufenzeichen.Sind Einstellungen an den Instanzen Websocket und Socket.io generell notwendig, oder nur dann, wenn ich Daten an den 405x senden möchte?
Gruß Andreas
-
@bergjet sagte in Test Adapter Husqvarna Automower v0.3.x:
Parken für 30 Minuten. Starten für 120 Minuten. Woher kommen die die Daten für 30 und 120 Minuten?
Im Button ist hier nichts eingetragen, bzw. wo kann man die Zeit ändern?Dafür habe ich den „materialdesign – Button State Multi“ verwendet, da kann man mehre ID mit Verzögerung ändern.
Als Erstes wird ohne VerzögerungACTIONS.park.parkTimeauf 30 gesetzt und dann mit Verzögerung 1000 msACTIONS.park.PARKauf true.Diese Änderungen habe ich aber erst nach meinem Upload hier gemacht, sodass der Upload der View weiter oben nicht mehr aktuell ist.
Hier noch mal die Importdatei meiner View mit allen Änderungen und Optimierungen:
Husqvarna_VIS_View V2.js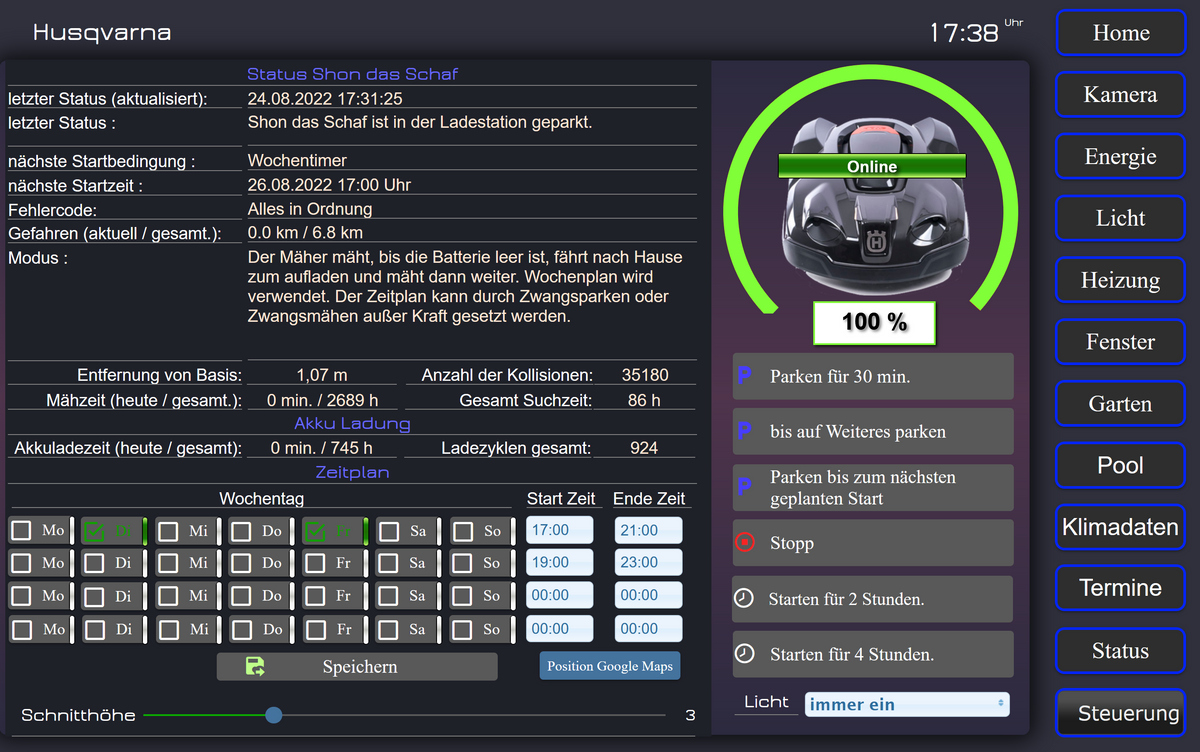
-
@arnod guten Morgen, wo bekomme ich denn das Bild für den Husqvarna her? Die Seite kann ich importieren, aber ohne Bilder. Beste Grüße
-
@rissn
Da hilft Google. Ein Bild suchen was passt und einfach den Hintergrund (z.B. mit Gimp) ausschneiden, sodass dieser Transparent ist.
Oder für ganz Faule, das hier verwenden. :-)
-
~~sry leute aber evtl bin ich einfach zu blind oder zu doof.
ich habe gerade v0.3.3 installiert.
habe auch einen Dev Acc bei Husqvarna erstellt.
bekomme nun vom Adpater folgende Meldung:husqvarna-automower.0 error Error: No Objects found, no Objects created. Check API (ERR_#008). (ERR_#004)ich denke mir, ja klar kann der nichts finden, der Dev Account kennt ja meine Automower nicht...
Jetzt meine Dummyfrage: Wie verbinde ich meine Mäher mit dem Dev Account?~~
ok... sry ist spät... wenn ich mich auch mit dem falschen Account anmelde... so geh pennen... n8 -
~~sry leute aber evtl bin ich einfach zu blind oder zu doof.
ich habe gerade v0.3.3 installiert.
habe auch einen Dev Acc bei Husqvarna erstellt.
bekomme nun vom Adpater folgende Meldung:husqvarna-automower.0 error Error: No Objects found, no Objects created. Check API (ERR_#008). (ERR_#004)ich denke mir, ja klar kann der nichts finden, der Dev Account kennt ja meine Automower nicht...
Jetzt meine Dummyfrage: Wie verbinde ich meine Mäher mit dem Dev Account?~~
ok... sry ist spät... wenn ich mich auch mit dem falschen Account anmelde... so geh pennen... n8@greyhound
Wenn der Adapter funktioniert bitte in den Repositories veröffentlichen.
Falls Hilfe dazu benötigt wird, bitte Bescheid geben.
Danke -
@greyhound
Wenn der Adapter funktioniert bitte in den Repositories veröffentlichen.
Falls Hilfe dazu benötigt wird, bitte Bescheid geben.
Danke@mcm57
Hallo,
neue Saison hat begonnen - und gleich ein Problem!
Die Entfernung zur Basis wird nicht richtig berechnet, bzw. wird der Nullpunkt in der Ladestation nicht gesetzt.
Der Entfernungswert liegt mom. bei 5737207,91m ???
Das hat aber schon mal funktioniert.
Ich benutze die v0.4.0-beta.3 und das hoffentlich zugehörige "Script for statistics" aus dem GitHub ice987987
kann mir jemand dazu helfen?
Gruß
Gerhard
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
249
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge