

[Frage] Xiaomi Vacuum cleaner
-
Ich habe heute morgen die Änderungen von xiaomi herausgefunden und werde diese heute Abend oder morgen früh in den Adapter einfließen lassen, also könnt ihr beruhigt den Roboter updaten. `
Kannst du was zu den technischen Details sagen?
-
@bluefox pull Request wurde erstellt, habs schon getestet müsste alles so laufen.
Also an alle Update kann ruhig gemacht werden, dann muss der Adapter jedoch auch updatet werden. Die neue version funktioniert natürlich auch mit dem alten Software stand. LG tobi
-
so das Adapterupdate ist online, ich habe es mit einem odroid c2 und mit einem win rechner getestet. Ich habe gerade festgestellt, dass das Zeitfenster in dem die Nachrichten seine Gültigkeit haben sehr klein ist, von daher würde ich bitten das Update zu testen und zu berichten
-
Das ist für den User nicht so wichtig. Nach dem Update nur beobachten ob die Werte regelmäßig aktualisieren. Noch besser im degug Mode im log schauen ob zu jedem senden auch was empfangen wird. Und kurze Rückmeldung geben
Gesendet von meinem SM-G930F mit Tapatalk
-
@tpr:Das Python-Skript von mir ist jetzt da zu haben: https://github.com/rytilahti/python-mirobo - dank zu gst666 (für krypto) und Meistertr (kommandos). Bis jetzt es ist nur mit meinem Robo gestetet, soweit ist die IP + das Token vorhanden sollte es einfach zu nutzen sein. Wer mehrere Kommandos weiß, bitte Bescheid (am liebsten als github issue) sagen / PR erzeugen. :-) `
Hast du vor dein Python Skript anzupassen? Bis jetzt läuft meiner damit leider nicht mehr, nach dem Update. -
Ich muss jetzt doch nochmal fragen.
Was hat es mit diesem Phyton Script auf sich?
Was muss ein normaler User nun tun?
Kann man das Update für den robo nun durchführen?
Den Adapter hab ich schon upgedatet.
Es steht aber immer noch 0.3.1 da; und nicht 0.3.2
mfg
-
Das python Script hat
Nichts mit iobroker zu tun. Am Anfang stand ein python Script von gst666 daraus endstand die Weiterentwicklung des Adapters und eine weitere umfangreiche python Steuerung. Ich persönlich bin der Meinung neu ist immer besser [emoji1]. Der Sauger läuft mit dem Update besser meiner Meinung nach.
Als User brauchst du nur wenn du den Roboter ein Update verpasst hast, auch den Adapter updaten somit ist die Welt in Ordnung.
@bahnuhr , du musst es über latest installieren, dann wird die 0.3.2 installiert
-
@bahnuhr , du musst es über latest installieren, dann wird die 0.3.2 installiert `
Was heißt das "… über latest installieren ..."
Ich bin eigentlich immer über "installieren aus eigenem url" (Symbol sieht aus wie ein Kopfhörer) gegangen.
Wo finde ich ... latest ... ?
mfg
-
@bahnuhr , du musst es über latest installieren, dann wird die 0.3.2 installiert `
Was heißt das "… über latest installieren ..."
Ich bin eigentlich immer über "installieren aus eigenem url" (Symbol sieht aus wie ein Kopfhörer) gegangen.
Wo finde ich ... latest ... ?
mfg `
ja genau und wenn du es darübe rinstalliert, wird die 0.3.2 installiert und auch angezeigt, habe es gerade auch so installiert -
Also bei mir funktioniert das nicht.
Habe das eben nochmal probiert.
Kopfhörer gedrückt. Mihome ausgewählt. Debug angeklickt.
Installation mit code 0 abgeschlossen.
Es wird aber immer noch 0.3.1 angezeigt.
mfg
-
filename="bild1.jpg" index="0">~~
-
Hallo,
ich noch ganz neu bei iobroker, da ich in meinem Haus KNX verbaut habe, und dazu noch eine Alexa, Loxone und eine Xiami Roboter habe, denke ich, dass der iobroker hier helfen könnte, das ganze zu verheiraten.
Nach sehr viel Mühe habe ich in einer VM (Debian) den iobroker grundsätzlich zum laufen bekommen und möchte als erstes den Sauger einbinden.
Ich bin mit dem Sauger auf der FW 3.3.9 und habe den Adapter 0.3.2 installiert.
Mittels Packetsender habe ich meinen Token nach einem WLAN Reset gefunden (ich hoffe, es ist der richtige - der Roboter hat auf das "Hallo" Packet geantwortet und ich habe die letzten 16 Byte (also 32 Zeichen) der Antwort in HEX genommen und in die Konfig der Instanz des Adapters eingetragen). Dazu noch den Port 54321 beim Roboter und noch einen beliebigen Port für meinen Rechner und die WLAN IP den Roboters eingetragen. Die Instanz wird auch komplett grün.
In meiner Naivität dachte ich jetzt, dass ich per Druck auf Objekte -> MiHomeVavuum -> Start -> Simuliere Knopfdruck einen startenden Roboter sehen müsste.
Ist der Gedankengang falsch? Wenn Nein - woran könnte es liegen? Wenn ja, wie kann ich am einfachsten testen, ob das ganze funktioniert (bevor ich meine anderen Devices einbinde …).
Gruß
ThePhantom
-
Hallo,
ich noch ganz neu bei iobroker, da ich in meinem Haus KNX verbaut habe, und dazu noch eine Alexa, Loxone und eine Xiami Roboter habe, denke ich, dass der iobroker hier helfen könnte, das ganze zu verheiraten.
Nach sehr viel Mühe habe ich in einer VM (Debian) den iobroker grundsätzlich zum laufen bekommen und möchte als erstes den Sauger einbinden.
Ich bin mit dem Sauger auf der FW 3.3.9 und habe den Adapter 0.3.2 installiert.
Mittels Packetsender habe ich meinen Token nach einem WLAN Reset gefunden (ich hoffe, es ist der richtige - der Roboter hat auf das "Hallo" Packet geantwortet und ich habe die letzten 16 Byte (also 32 Zeichen) der Antwort in HEX genommen und in die Konfig der Instanz des Adapters eingetragen). Dazu noch den Port 54321 beim Roboter und noch einen beliebigen Port für meinen Rechner und die WLAN IP den Roboters eingetragen. Die Instanz wird auch komplett grün.
In meiner Naivität dachte ich jetzt, dass ich per Druck auf Objekte -> MiHomeVavuum -> Start -> Simuliere Knopfdruck einen startenden Roboter sehen müsste.
Ist der Gedankengang falsch? Wenn Nein - woran könnte es liegen? Wenn ja, wie kann ich am einfachsten testen, ob das ganze funktioniert (bevor ich meine anderen Devices einbinde …).
Gruß
ThePhantom `
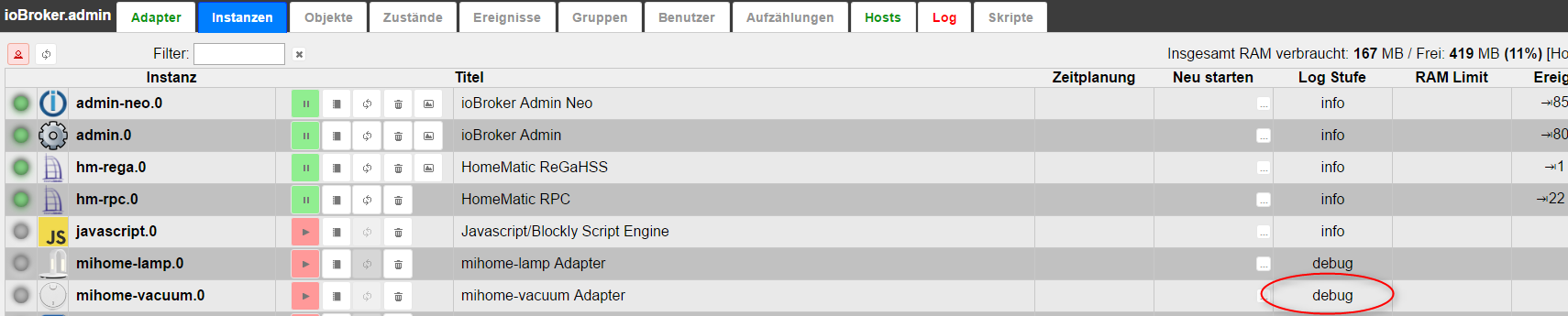
Deine Beschreibung ist sehr ausführlich und ist zu 100% korrekt. wenn die instanz grün wird, aber die objecte nciht befüllt werden und auch ein start knopf nichts bewirkt, war bis lang immer der token falsch. zur Bestätigung kannst du noch den adapter auf debug stellen (Bild1). Dann schaue mal im log, Well hier nur Rechive Helo steht (im 20 sec takt) und keine recive {result:…} , dann musst du deinen roboter noch einmal aus dem netwerk schmeißen und den Token erneut abfangen. Mit freundlichen Grüßen Tobi
1768_2017-06-10_05h13_27.png
1768_2017-06-10_05h15_16.png
{kind=link}
{kind=link}
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden334
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge