

Neuer Robonect HX Adapter
-
Installiert und bisher keine Fehler im Log bzgl. des Adapters.

-
@Sweatchuck Danke für die Screenshots.
Mal gucken, dass wir das GPS ans Laufen bekommen.
- Kannst Du bitte einmal im Browser folgende URL aufrufen http:<ROBONECT_IP>/json?cmd=gps und posten, was Du für eine Antwort bekommst. <ROBONECT_IP> muss natürlich durch die richtige IP ersetzt werden. ;-)
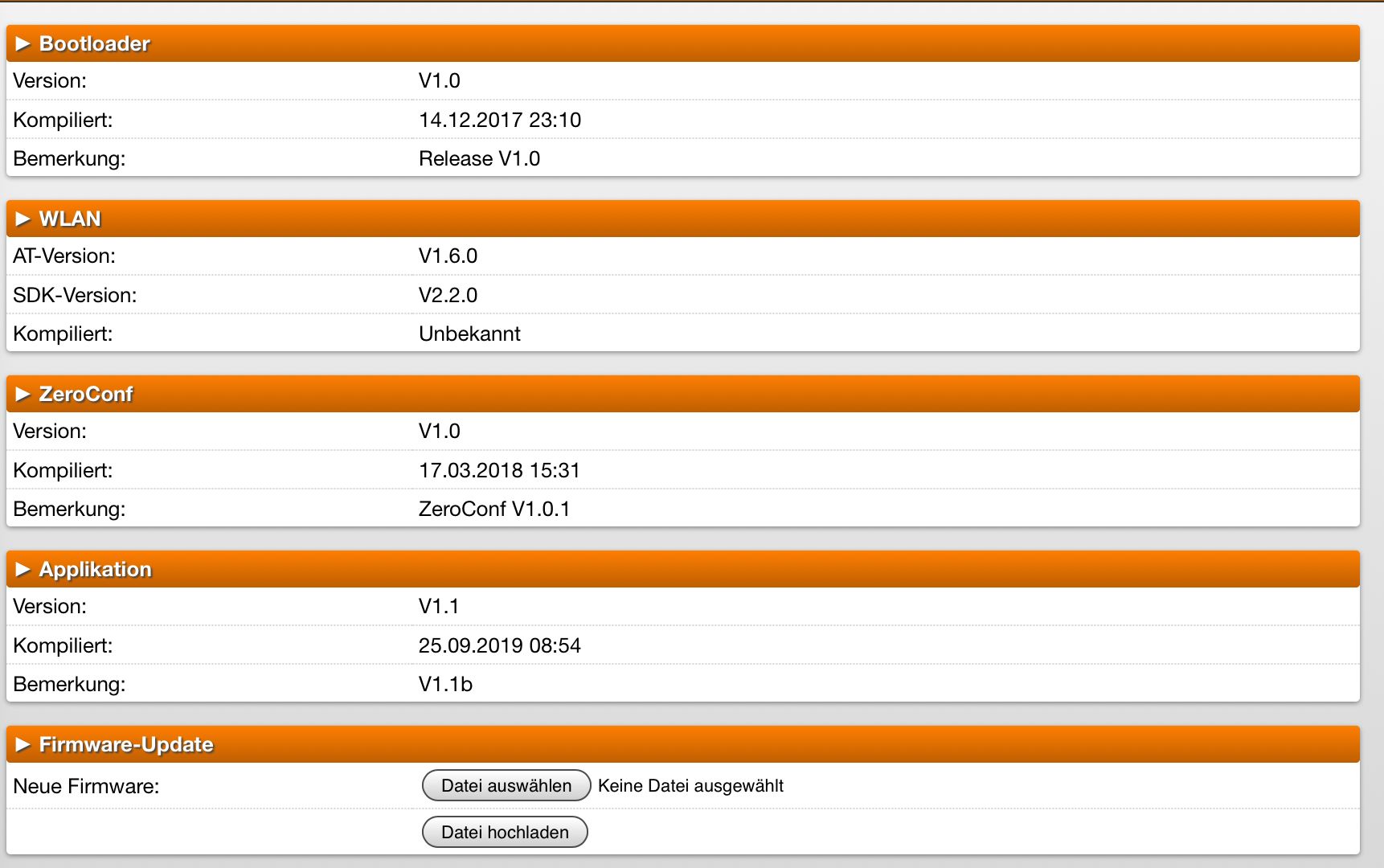
- Zusätzlich bitte auch einmal prüfen und bestätigen, dass Du Robonect Firmware v1.1b und die ZeroConf v1.4 installiert hast. Beides kannst Du im Robonect Webinterface sehen.
Bzgl. der Batterie Objekte: Hast Du eine ältere Version des Adapters installiert gehabt? In einer alten Firmware und damit in einer alten Adapter Version gab es nur eine Batterie. Anscheinend gibt es mittlerweile Mähroboter, die mehrere Batterien haben und entsprechend gibt Robonect das aus. Am besten löscht Du einmal die Instanz und erstellst eine neue. Danach sollten sich die Objekte neu aufbauen.
Hallo,
Anbei die Info
Zu Punkt 1:
{"gps": {"satellites": 16, "latitude": "08°15.0815 N", "longitude": "08°1.5081 E"}, "successful": true}

P.S. Die Zahlen habe ich verändert. Will nicht unbedingt die Position meiner streng geheimen Basis posten. ;-)
Zu Punkt 2:
Habe die Verson v1.1b installiert.
Die Instanz habe ich gelöscht. Aktuell werden mir unter Batterie keine Daten eingetragen. Vielleicht muss ich noch etwas warten. Ich melde mich.
Edit: Batterieanzeige ist da...
Danke,
Sweatchuck -
Hallo,
Anbei die Info
Zu Punkt 1:
{"gps": {"satellites": 16, "latitude": "08°15.0815 N", "longitude": "08°1.5081 E"}, "successful": true}
P.S. Die Zahlen habe ich verändert. Will nicht unbedingt die Position meiner streng geheimen Basis posten. ;-)
Zu Punkt 2:
Habe die Verson v1.1b installiert.
Die Instanz habe ich gelöscht. Aktuell werden mir unter Batterie keine Daten eingetragen. Vielleicht muss ich noch etwas warten. Ich melde mich.
Edit: Batterieanzeige ist da...
Danke,
Sweatchuck@Sweatchuck sagte in Neuer Robonect HX Adapter:
Aktuell werden mir unter Batterie keine Daten eingetragen
Hi, hast du im Adapter unter Batterie "Status" oder "Info" eingetragen? (Ich hatte mal gleiches Problem und da war "nicht abfragen" eingestellt ;-) )
-
@Sweatchuck sagte in Neuer Robonect HX Adapter:
Aktuell werden mir unter Batterie keine Daten eingetragen
Hi, hast du im Adapter unter Batterie "Status" oder "Info" eingetragen? (Ich hatte mal gleiches Problem und da war "nicht abfragen" eingestellt ;-) )
-
@braindead
kennst du das (https://forum.iobroker.net/topic/32036/beta-test-js-controller-3-0-x-auf-github/250) schon ? -
@braindead
kennst du das (https://forum.iobroker.net/topic/32036/beta-test-js-controller-3-0-x-auf-github/250) schon ? -
Hallo,
Anbei die Info
Zu Punkt 1:
{"gps": {"satellites": 16, "latitude": "08°15.0815 N", "longitude": "08°1.5081 E"}, "successful": true}
P.S. Die Zahlen habe ich verändert. Will nicht unbedingt die Position meiner streng geheimen Basis posten. ;-)
Zu Punkt 2:
Habe die Verson v1.1b installiert.
Die Instanz habe ich gelöscht. Aktuell werden mir unter Batterie keine Daten eingetragen. Vielleicht muss ich noch etwas warten. Ich melde mich.
Edit: Batterieanzeige ist da...
Danke,
Sweatchuck@Sweatchuck Dein Fehler ist zufällig beim Test des js-controller v3.0.x aufgefallen (https://forum.iobroker.net/topic/32036/beta-test-js-controller-3-0-x-auf-github/250).
Ich habe ihn in Version v0.1.1 behoben. Kannst Du den Adapter bitte von GitHub aktualisieren und nochmal testen, ob es jetzt funktioniert?
-
@Sweatchuck Dein Fehler ist zufällig beim Test des js-controller v3.0.x aufgefallen (https://forum.iobroker.net/topic/32036/beta-test-js-controller-3-0-x-auf-github/250).
Ich habe ihn in Version v0.1.1 behoben. Kannst Du den Adapter bitte von GitHub aktualisieren und nochmal testen, ob es jetzt funktioniert?
Hallo, nun kommt was an. Satelliten bleiben leer.
Die Formatierung ist aber noch nicht richtig. Das Grad-Zeichen wird als 0 genommen, der Punkt sitzt auch nicht richtig.
Ich kann dir bei Bedarf einen Screenshot schicken.Solltest du ein Bild benötigen, einfach kurze Nachricht mit Email-Adresse.
Gruß
Sweatchuck -
@Sweatchuck Sowohl die Koordinaten, als auch die Satelliten sollten jetzt funktionieren. Kannst Du den Adapter bitte einmal aus GitHub aktualisieren und testen? Ich habe keine noch keine neue Version daraus gemacht, weil ich erst sicher sein will, dass es soweit funktioniert.
-
@Sweatchuck Sowohl die Koordinaten, als auch die Satelliten sollten jetzt funktionieren. Kannst Du den Adapter bitte einmal aus GitHub aktualisieren und testen? Ich habe keine noch keine neue Version daraus gemacht, weil ich erst sicher sein will, dass es soweit funktioniert.
-
Hast ne Mail bekommen.
-
@braindead
Erst mal danke für deinen Adapter.
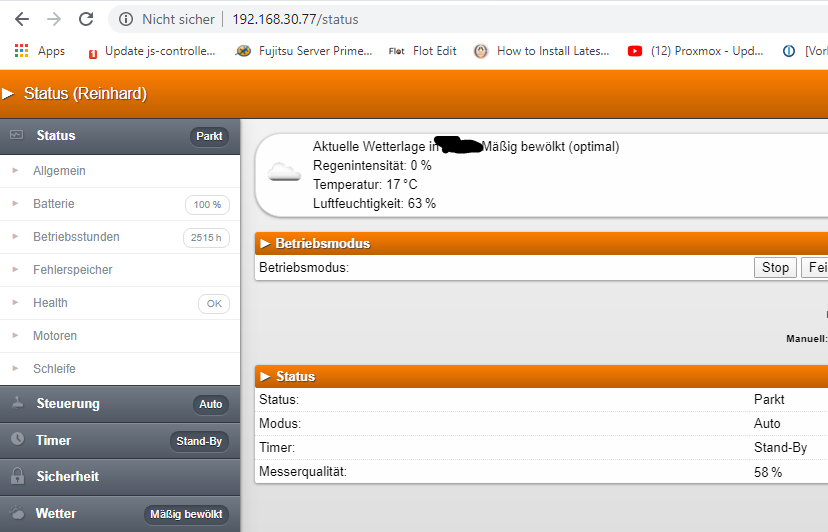
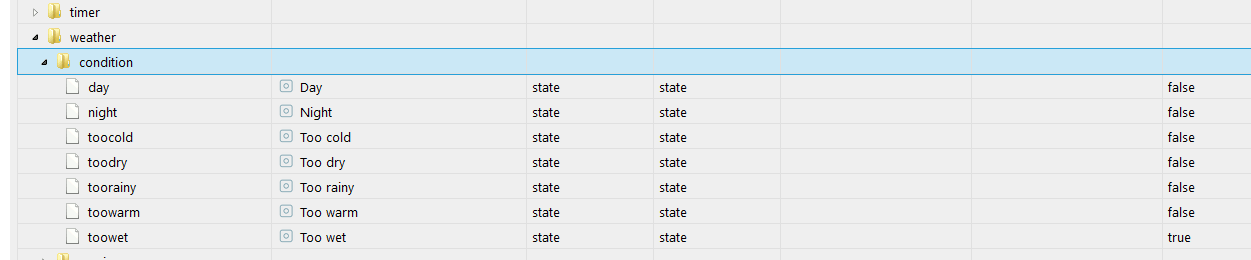
Die akuelle Wetterlage wird anscheinend nicht in den Objekten unter weather.condition übertragen.
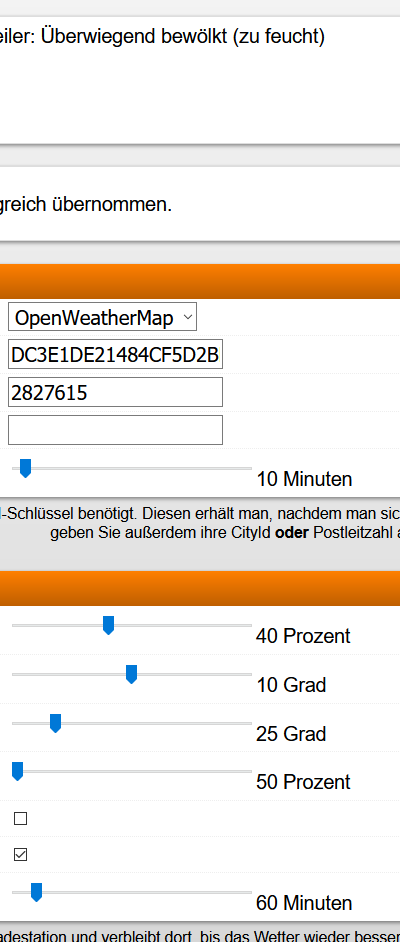
z.B. auf der Robonect-Seite:

Modus: WetterpauseIn iobroker ist aber kein Status ersichtlich:
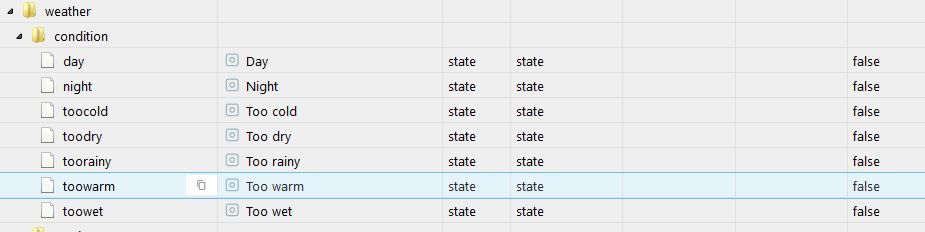
Müsste hier nicht toocold auf true sein? Oder liegt es daran das die Wetterpause innerhalb der eingestellten Ruhezeit liegt?
-
@braindead
Erst mal danke für deinen Adapter.
Die akuelle Wetterlage wird anscheinend nicht in den Objekten unter weather.condition übertragen.
z.B. auf der Robonect-Seite:
Modus: WetterpauseIn iobroker ist aber kein Status ersichtlich:
Müsste hier nicht toocold auf true sein? Oder liegt es daran das die Wetterpause innerhalb der eingestellten Ruhezeit liegt?
-
@braindead
Erst mal danke für deinen Adapter.
Die akuelle Wetterlage wird anscheinend nicht in den Objekten unter weather.condition übertragen.
z.B. auf der Robonect-Seite:
Modus: WetterpauseIn iobroker ist aber kein Status ersichtlich:
Müsste hier nicht toocold auf true sein? Oder liegt es daran das die Wetterpause innerhalb der eingestellten Ruhezeit liegt?
@Chris_71 Der Adapter übernimmt die Werte so, wie sie über die API vom Robonect Modul kommen. Kann es sein, dass das Wetter als "Info" eingestellt ist und die Werte im ioBroker schon ein paar Minuten alt sind?
Kannst Du bitte einmal folgende URL im Browser aufrufen und gucken, ob die Rückgabe zu den Werten in ioBroker passt? Wichtig ist, dass das zeitnah zur "Info" Abfrage gemacht wird, weil die Werte sich ansonsten wieder geändert haben könnten.
http://<ROBONECT_IP>/json?cmd=weather
<ROBONECT_IP> muss natürlich durch die richtige IP ersetzt werden. ;-)Du bekommst einen JSON String zurück, der auf den ersten Blick wirr aussieht, aber eigentlich ganz gut gelesen werden kann.
-
@braindead
Wie Werte aus dem JSON String sind jetzt identisch. Alle Werte haben den Zeitstempel im iobroker von gerade eben. Dann muss es mit der Ruhepause zusammen hängen. Ich werde die Pause heute verändern und mal schauen ob es morgen mit "toocold" passt. Falls es daran liegt, könnte man die Wetterabfrage aus der Ruhepause rausnehmen ohne das der Mähroboter immer "Piep" macht bei der Abfrage? -
@braindead
Wie Werte aus dem JSON String sind jetzt identisch. Alle Werte haben den Zeitstempel im iobroker von gerade eben. Dann muss es mit der Ruhepause zusammen hängen. Ich werde die Pause heute verändern und mal schauen ob es morgen mit "toocold" passt. Falls es daran liegt, könnte man die Wetterabfrage aus der Ruhepause rausnehmen ohne das der Mähroboter immer "Piep" macht bei der Abfrage? -
@Chris_71 An dem Piepen kann ich leider nichts ändern. Es wird ausgelöst, wenn der Mäher schläft und der Adapter ihn wegen einer Abfrage von Daten weckt, die nicht im Speicher des Robonect Moduls vorliegen. Tut mir leid.
@braindead @Chris_71 alternativ könnte man das auch lösen in dem man den pieper vom board abzieht ;)
-
Hallo Zusammen,
habe seit dem Wochenende etwas Probleme mit dem Adapter. Ich hatte meine System komplett
neu auf als Proxmox Container aufgesetzt, mit aktuellem js-controller 3.0.19 und Node 12.x.Jetzt bekomme ich mit dem Adapter keine Verbindung mehr zum Robonect Controller. Auf das heutige
Update auf js 3.0.20 sowie einem Firmware Update des Mähers auf V1.2 brachte keinen Erfolg.
Über den Browser kann ich ganz normal auf den Mäher zugreifen, über iobroker bekomme ich folgene Fehlermeldung
robonect.0 2020-04-28 16:25:33.434 error (10287) No connection to lawn mower. Check network connection.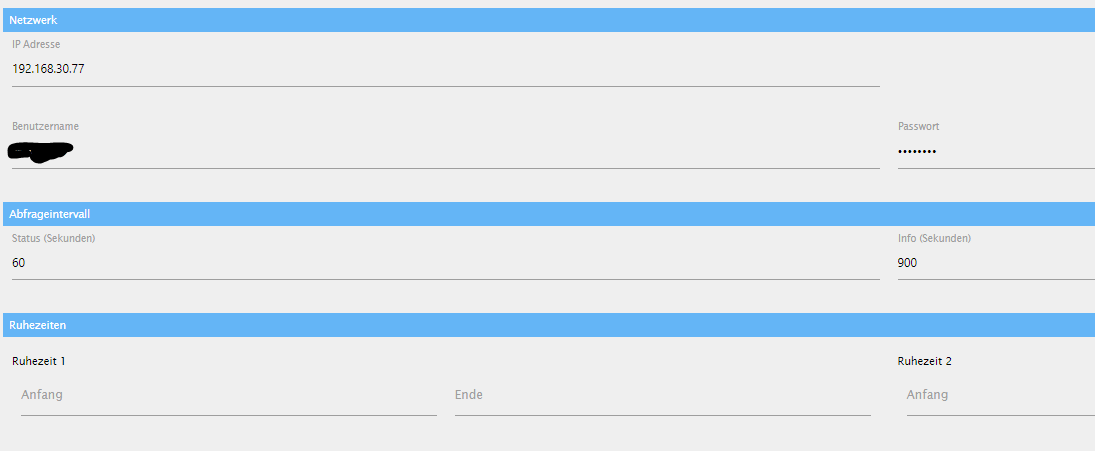
was mich verwundert , auch der Ping Adapter zeigt nur "false" an. Ich komme aber über den Container ins
mit allen anderen Adaptern ins Internet ?????Vielleicht hat ja jemand ne Idee :-)

Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden350
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge