

[Frage] Xiaomi Vacuum cleaner
-
Ahh also weiterhin China. Danke
Wie kommst du an die 3.3.9.3194 ?
Was gibts denn da neues / besseres / an Änderungen?
Danke für die Info.
Dann kann ich ja lange probieren.
Wusste nicht, dass bei jedem Server-Wechsel auch immer der Token neu ausgelesen werden muss.
Hoffe es klappt noch mit IOS.
Vielen Dank nochmals für Eure Unterstützung.
-
Ahh also weiterhin China. Danke
Wie kommst du an die 3.3.9.3194 ?
Was gibts denn da neues / besseres / an Änderungen?
Danke für die Info.
Dann kann ich ja lange probieren.
Wusste nicht, dass bei jedem Server-Wechsel auch immer der Token neu ausgelesen werden muss.
Hoffe es klappt noch mit IOS.
Vielen Dank nochmals für Eure Unterstützung. ` Die 3194 ist der gen1 bei gen 2 ist die 1412 die aktuellste wie gesagt komm ich mit meinen gen2 nicht mehr auf China. Bin aber mit Europa zufrieden, da die Karten viel schneller geladen werden..
Gesendet von meinem Handy
-
Die 3194 ist der gen1 bei gen 2 ist die 1412 die aktuellste wie gesagt komm ich mit meinen gen2 nicht mehr auf China. Bin aber mit Europa zufrieden, da die Karten viel schneller geladen werden.. `
Ahh OK,Bei mir sagt er, dass ich die aktuellste Version drauf habe. kann also gar nicht auf die 1412.
Kannst du mir vielleicht noch sagen, welchen Unterschied es zwischen den Servern gibt? Was geht, was geht nicht?
Hast du vielleicht eine Erklärung, warum ich NICHT auf Europa komme? (Bekomme einfach keine W-Lan Verbindung hin.
Würde sonst auch auf Europa wechseln, wenn ich die FW updaten kann und es keine Einschränkungen gibt.
Gruß
Xanon
-
Hallo Zusammen,
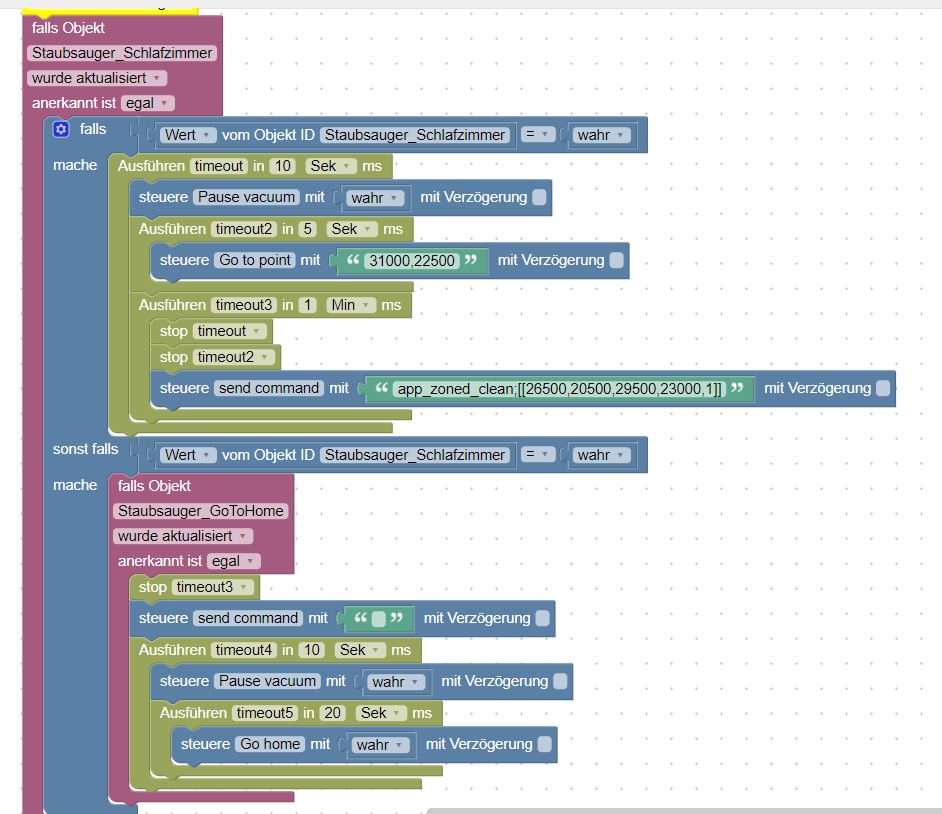
hat jemand schon mal versucht, während der Zonenreinigung den Roboter wieder in die HomeBase zu Schicken ?
Hier mein Blockly. Er reagiert hier überhaupt nicht drauf,wenn ich den Befehl GoToHome sende // Rest arbeitet er sauber ab,kehrt auch am Ende der Reinigung wieder in seine Station zurück. Bin leider auch Blockly-Anfänger :-) ( ST liegt mir da eher– Beckhoff )
Jemand eine Idee ?
Gruß
Kevin
Nachtrag:
Jetzt klappt es :-) // "falls Objekt" als Extra Block gesetzt.
-
Moin,
gibt es mittlerweile eine valide Vorgehensweise, dass der Roborock die Map nicht rotiert?
Ich habe seit gestern einen und er hat nach der ersten Reinigung eine brauchbare Map erstellt gehabt. Nachdem ich ihn dann zu einem Punkt geschickt habe, hat er die Karte rotiert und die Koordinaten waren somit natürlich auch anders.
Habe in dem Thread gelesen, dass man nur Zonenreinigung machen soll, damit er die Map nicht dreht. Nur er dreht sie ja schon, wenn ich ihn nur zu einem Punkt sende, was in meinem Fall schon eine wünschenswerte Funktion wäre.
beste Grüße
foxriver
-
Moin,
gibt es mittlerweile eine valide Vorgehensweise, dass der Roborock die Map nicht rotiert?
Ich habe seit gestern einen und er hat nach der ersten Reinigung eine brauchbare Map erstellt gehabt. Nachdem ich ihn dann zu einem Punkt geschickt habe, hat er die Karte rotiert und die Koordinaten waren somit natürlich auch anders.
Habe in dem Thread gelesen, dass man nur Zonenreinigung machen soll, damit er die Map nicht dreht. Nur er dreht sie ja schon, wenn ich ihn nur zu einem Punkt sende, was in meinem Fall schon eine wünschenswerte Funktion wäre.
beste Grüße
foxriver `
ja gibt es, siehe meinen Post (zuerst normale Reinigung für paar sec. starten (start vacuum, pause vacuum), danach GoTo oder direkt Zonenreinigung ausführen), funktioniert bei mir täglich seit 1,5 Monaten :D
-
/* List of states 1 unknown state 2 sleep no Charge 3 sleep 5 cleaning 6 returning home 7 manual mode 8 charging 10 paused 11 spot cleaning 12 Error */Wenn sich meiner verhakt, gibts die 12 und dann sende ich eine email mit "Help"
-
und das ist die Error Liste:
var v_Error = getState('mihome-vacuum.0.info.error').val; var v_Text = ""; if (v_Error === 0) v_Text = "no Error"; if (v_Error === 1) v_Text = "Laser distance sensor error"; if (v_Error === 2) v_Text = "Collision sensor error"; if (v_Error === 3) v_Text = "Wheels on top of void, move robot"; if (v_Error === 4) v_Text = "Clean hovering sensors, move robot"; if (v_Error === 5) v_Text = "Clean main brush"; if (v_Error === 6) v_Text = "Clean side brush"; if (v_Error === 7) v_Text = "Main wheel stuck?"; if (v_Error === 8) v_Text = "Device stuck, clean area"; if (v_Error === 9) v_Text = "Dust collector missing"; if (v_Error === 10) v_Text = "Clean filter"; if (v_Error === 11) v_Text = "Stuck in magnetic barrier"; if (v_Error === 12) v_Text = "Low battery"; if (v_Error === 13) v_Text = "Charging fault"; if (v_Error === 14) v_Text = "Battery fault"; if (v_Error === 15) v_Text = "Wall sensors dirty, wipe them"; if (v_Error === 16) v_Text = "Place me on flat surface"; if (v_Error === 17) v_Text = "Side brushes problem, reboot me"; if (v_Error === 18) v_Text = "Suction fan problem"; if (v_Error === 19) v_Text = "Unpowered charging station"; setState("javascript.0.Status.Geräte.Mihome_Text_Error", v_Text); -
und hier das ganze Script inkl. telegram und Sound-Ansage:
// Error, Text in Variable schreiben ---------------------------------------------------------------------------------------------- on({id: "mihome-vacuum.0.info.error", change: "ne"}, function(obj){ var v_Error = getState('mihome-vacuum.0.info.error').val; var v_Text = ""; if (v_Error === 0) v_Text = "no Error"; if (v_Error === 1) v_Text = "Laser distance sensor error"; if (v_Error === 2) v_Text = "Collision sensor error"; if (v_Error === 3) v_Text = "Wheels on top of void, move robot"; if (v_Error === 4) v_Text = "Clean hovering sensors, move robot"; if (v_Error === 5) v_Text = "Clean main brush"; if (v_Error === 6) v_Text = "Clean side brush"; if (v_Error === 7) v_Text = "Main wheel stuck?"; if (v_Error === 8) v_Text = "Device stuck, clean area"; if (v_Error === 9) v_Text = "Dust collector missing"; if (v_Error === 10) v_Text = "Clean filter"; if (v_Error === 11) v_Text = "Stuck in magnetic barrier"; if (v_Error === 12) v_Text = "Low battery"; if (v_Error === 13) v_Text = "Charging fault"; if (v_Error === 14) v_Text = "Battery fault"; if (v_Error === 15) v_Text = "Wall sensors dirty, wipe them"; if (v_Error === 16) v_Text = "Place me on flat surface"; if (v_Error === 17) v_Text = "Side brushes problem, reboot me"; if (v_Error === 18) v_Text = "Suction fan problem"; if (v_Error === 19) v_Text = "Unpowered charging station"; setState("javascript.0.Status.Geräte.Mihome_Text_Error", v_Text); if (v_Error > 0) { log("Auslöser: Mihome Staubsauger hat Error !"); sendTo('telegram', "Achtung, Achtung! \nDer Mihome Staubsauger hat folgenden Error:\n" + v_Text); View_change ('Geraete', 0); //Sound var request = require ('request'); request('http://192.168.243.76:50000/track=tng_red_alert2.wav'); setTimeout(setState('sayit.0.tts.text', "Achtung, Achtung! Der Robo Staubsauger hat Error"), 5000); View_change ('Titel', 30000); } }); -
/* List of states 1 unknown state 2 sleep no Charge 3 sleep 5 cleaning 6 returning home 7 manual mode 8 charging 10 paused 11 spot cleaning 12 Error */Wenn sich meiner verhakt, gibts die 12 und dann sende ich eine email mit "Help" `
Danke!!!!
-
Mit PushOver und verschiedenen Prioritäten so gelöst (den Error gleich auslesen hatte nicht funktioniert, weil der State nicht schnell genug wechselte, somit kommt erst "Fehler" und danach der eigentliche Fehler):
/* Status Pushen */ on({id: "mihome-vacuum.0.info.state"/*Vacuum state*/, change: "ne"}, function (obj) { nachricht = obj.state.val; prio = -1; betreff = "Roborock"; instance = 0; switch (nachricht) { case 2: nachricht = "gehe Schlafen ohne Laden!"; break; case 3: nachricht = "gehe Schlafen!"; break; case 6: nachricht = "Weg zur Ladestation!"; prio = -2; break; case 8: nachricht = getState("mihome-vacuum.0.info.cleanedarea"/*Cleaned area*/).val + "m² in " + getState("mihome-vacuum.0.info.cleanedtime"/*Cleaning time*/).val + "min. Ladestation erreicht!"; break; case 12: betreff = "Roborock - Error!"; prio = -2; nachricht = "wird ausgelesen!"; break; case 16: nachricht = "GoTo Point!"; prio = -2; break; case 17: nachricht = "In Zonen Reinigung!"; prio = -2; break; default: nachricht = "Status -" + nachricht + "- unbekannt!"; } sendTo("pushover." + instance, { message: nachricht, // mandatory - your text message title: betreff, // optional - your message's title, otherwise your app's name is used priority: prio,}); }); on({id: "mihome-vacuum.0.info.error"/*Error*/, change: "ne"}, function (obj) { betreff = "Roborock - Error!"; prio = 0; instance = 2; switch (getState("mihome-vacuum.0.info.error"/*Error*/).val) { case 0: nachricht = "No Error"; break; case 1: nachricht = "Laser distance sensor error"; break; case 2: nachricht = "Collision sensor error"; break; case 3: nachricht = "Wheels on top of void, move robot"; break; case 4: nachricht = "Clean hovering sensors, move robot"; break; case 5: nachricht = "Clean main brush"; break; case 6: nachricht = "Clean side brush"; break; case 7: nachricht = "Main wheel stuck?"; break; case 8: nachricht = "Device stuck, clean area"; break; case 9: nachricht = "Dust collector missing"; break; case 10: nachricht = "Clean filter"; break; case 11: nachricht = "Stuck in magnetic barrier"; break; case 12: nachricht = "Low battery"; break; case 13: nachricht = "Charging fault"; break; case 14: nachricht = "Battery fault"; break; case 15: nachricht = "Wall sensors dirty, wipe them"; break; case 1: nachricht = "Place me on flat surface"; break; case 1: nachricht = "Side brushes problem, reboot me"; break; case 1: nachricht = "Suction fan problem"; break; case 1: nachricht = "Unpowered charging station"; break; case 1: nachricht = "Battery fault"; break; default: nachricht = "Error - Status unbekannt!"; } sendTo("pushover." + instance, { message: nachricht, // mandatory - your text message title: betreff, // optional - your message's title, otherwise your app's name is used priority: prio,}); }); -
Ich gebe über vis und telegram aus das der Staubbehälter geleert werden soll. Das funktioniert sowert sehr gut aber die Methode gefällt mir noch nicht. Momentan gibt er alle 5x "Vacuum state=5" die Meldung aus. Da er aber auch, wenn er sich festgefahren hat und man ihn weiterschickt, wieder auf state5 geht kann es sein das man schon nach 2-3 Tagen die Meldung bekommt. Sinniger wär es zb alle 200-250qm Reinigungsfläche die Meldung auszugeben. Das bekomme ich aber nicht hin. Man müsste "mihome-vacuum.0.history.total_area" und "mihome-vacuum.0.info.cleanedarea" dazu berechnen. Irgendwie bin ich aber zu doof das umzusetzen. Hat jemand eine Idee?
-
ungetestet:
createState('Roborock.DustHour', 0,{type: "number",name:"Nutzung Saugbehaelter in h", role: "Nutzung Saugbehaelter in h"}); on({id: "mihome-vacuum.0.info.cleanedarea", change: "ne"}, function (obj) { gesamt = getState("mihome-vacuum.0.info.cleanedarea"/*Cleaned area*/).val + getState("javascript.0.Roborock.DustHour").val; setState("javascript.0.Roborock.DustHour", gesamt); if (gesamt > 225) { setState("javascript.0.Roborock.DustHour",0); // und hier noch Push ergänzen } });Das sollte bei jeder Änderung des State "cleanedarea" den State "DustHour" nach oben zählen. Bis der Wert 225 erreicht ist, dann wird im if Bereich alles abgearbeitet und wieder auf 0 gesetzt.
Grüße
Brati
-
/* List of states 1 unknown state 2 sleep no Charge 3 sleep 5 cleaning 6 returning home 7 manual mode 8 charging 10 paused 11 spot cleaning 12 Error */Wenn sich meiner verhakt, gibts die 12 und dann sende ich eine email mit "Help" `
Danke!!!! `
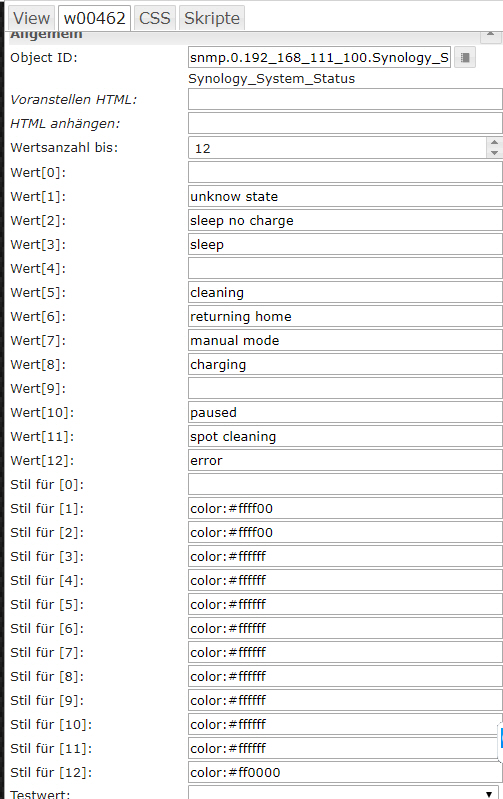
wie bekomme ich diese states im vis dargestellt..
das hier, scheint nicht so ganz zu funktionieren.
aktuell müsste der wert charging angezeigt weren, es wird jedoch unknown state angezeigt.
-
ungetestet:
createState('Roborock.DustHour', 0,{type: "number",name:"Nutzung Saugbehaelter in h", role: "Nutzung Saugbehaelter in h"}); on({id: "mihome-vacuum.0.info.cleanedarea", change: "ne"}, function (obj) { gesamt = getState("mihome-vacuum.0.info.cleanedarea"/*Cleaned area*/).val + getState("javascript.0.Roborock.DustHour").val; setState("javascript.0.Roborock.DustHour", gesamt); if (gesamt > 225) { setState("javascript.0.Roborock.DustHour",0); // und hier noch Push ergänzen } });Das sollte bei jeder Änderung des State "cleanedarea" den State "DustHour" nach oben zählen. Bis der Wert 225 erreicht ist, dann wird im if Bereich alles abgearbeitet und wieder auf 0 gesetzt.
Grüße
Brati `
Vielen Dank. Ich werde es gleich testen. :-)
-
Funktioniert leider nicht. Er addiert so bei jeder state Änderung den Wert zu dusthour. So kommt man dann bei 17qm real auf einen Wert von über 600. Man muss den cleanedaera wert quasi auslesen (qm) und so lange addieren bis 250 erreicht ist. Eine Reinigung ergibt bei uns ca 50qm. Danach wird der Wert cleanedarea wieder auf 0 gesetzt aber der Wert von dusthour muss bei 50 bleiben und dann bei der nächsten Reinigung weiterzählen. Ist doch nicht ganz so trivial. Andere Möglichkeit wäre bei der state Änderung „Returning home“ den cleandeaera Wert zu dusthour zu addieren.
-
Ahh, stimmt er zählt ja den Wert bei der Reinigung nach oben, also wird alle 6s addiert. Das Problem ist aber, dass er Returning to Home auch annimmt, wenn er nur zu einem Punkt gefahren ist.
Dann müsste man addieren, wenn er in der Basis ist und der Wert sich geändert hat.
Ich mache mir mal Gedanken… Brauchen wir nur ein, zwei States mehr.
Soll der Stunden Zähler automatisch auf 0 gesetzt werden oder per vis? Ich glaube den Status "Staubbehälter entnommen" gibt es so nicht...
Grüße Brati
Von unterwegs gesendet...

Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden514
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge