Neuer Adapter für Roborock-Staubsauger
-
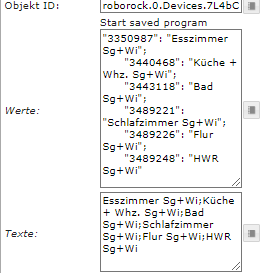
Ich möchte gerne meine erstellten Programme in der Vis starten. Habe dazu das Widget Select Value List gewählt. Aber leider starten die Programme dadurch nicht.
{ "type": "state", "common": { "name": "Start saved program", "type": "string", "unit": null, "role": "value", "read": true, "write": true, "states": { "3350987": "Esszimmer Sg+Wi", "3440468": "Küche + Whz. Sg+Wi", "3443118": "Bad Sg+Wi", "3489221": "Schlafzimmer Sg+Wi", "3489226": "Flur Sg+Wi", "3489248": "HWR Sg+Wi" }, "def": "3350987" }, "native": {}, "from": "system.adapter.roborock.0", "user": "system.user.admin", "ts": 1728377204262, "_id": "roborock.0.Devices.7L4bCl02tGmauu1NGDj0zq.programs.startProgram", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }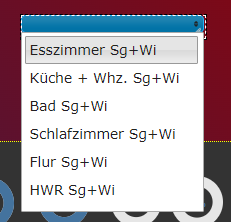
-
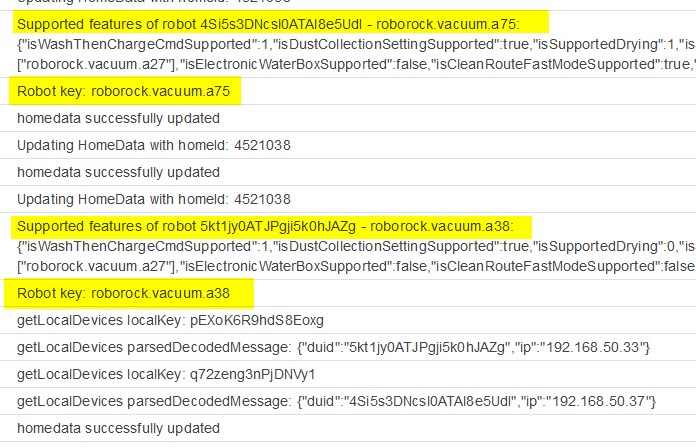
@lustig29 was steht im Protokoll vom Adapter?
-
@copystring Mal ne Frage:
Habe die Version 0.6.16 laufen, die eigentlich gut funktioniert
")
Aber immer wenn die Robbis laufen kommen diese Warnings:

Scheinbar fehlt in den Objekten noch ein Datenpunkt....
Brauchst du ein DEBUG ??
-
Morgen zusammen,
wir haben gestern unseren S8 MaxV Ultra bekommen, wir sind bis jetzt total begeistert.
Ich habe mir direkt den Adapter mit der Version 0.6.16 geladen, in der App die Räume alle erstellt und soweit alles eingerichtet.In den Protokollen bekomme ich ständig folgende Meldung:
Unsupported attribute: dss of get_status with value 2729. Please contact the dev to add the newly found attribute of your robot. Model: roborock.vacuum.a97
Ich habe mir die ca. 700 Beiträge noch nicht durch gelesen, daher weiß ich nicht ob das Thema schon behandelt wurde,
aber der Log wird mir mit dieser Meldung voll geschrieben. -
Hi, danke für den Adapter. Ich nutze node v18.18.2 ist eine kopatibilität geplant?
-
Hallo zusammen,
habe aktuell 2 Roboter im Einsatz und je Roboter verschieden Fehlermeldungen
QRevo S
Failed to map rooms. You need to name your rooms via the mobile app on your phone.S8 Pro Ultra
Failed to execute get_map_v1 on robot 7Q17LTIuWAbBMQlXxxxx (unknown model): Error: Failed to convert JavaScript value `Undefined` into rust type `String`Node.js:
v20.18.0NPM:
10.8.2Installierte Version:
0.6.16 -
@copystring Was meinst du?
-
Hallo zusammen,
ich möchte euch nochmal daran erinnern, Probleme bitte auf GitHub als Issue zu eröffnen. Nur so können wir sicherstellen, dass alle Probleme sauber nachvollzogen und effektiv behoben werden. Denkt daran, auch immer ein entsprechendes Debuglog hochzuladen, damit ich euch bestmöglich helfen kann.
Vielen Dank für eure Unterstützung!
Hier ist der Link dazu: https://github.com/copystring/ioBroker.roborock/issues
-
@tritanium Welchen Saugroboter hast du nochmal?
-
-
Failed to execute executeScene on robot undefined (unknown model): AxiosError: Request failed with status code 400 at settle (/opt/iobroker/node_modules/iobroker.roborock/node_modules/axios/lib/core/settle.js:19:12) at IncomingMessage.handleStreamEnd (/opt/iobroker/node_modules/iobroker.roborock/node_modules/axios/lib/adapters/http.js:599:11) at IncomingMessage.emit (node:events:531:35) at IncomingMessage.emit (node:domain:488:12) at endReadableNT (node:internal/streams/readable:1696:12) at processTicksAndRejections (node:internal/process/task_queues:82:21) at Axios.request (/opt/iobroker/node_modules/iobroker.roborock/node_modules/axios/lib/core/Axios.js:45:41) at processTicksAndRejections (node:internal/process/task_queues:95:5) at Roborock.executeScene (/opt/iobroker/node_modules/iobroker.roborock/main.js:404:5) -
@tritanium Ich hab es für den kommenden Release behoben. Dennoch bitte ich dich in Zukunft in Issue auf GitHub zu eröffnen. Nur so können Probleme bestmöglich nachvollzogen werden.
-
@copystring wenn die issues auf GitHub gut beschrieben werden...
-
Super, danke.
Ich hatte extra gefragt, ob du ein DEBUG möchtest
... ist ja kein Problem dann dazu ein ISSUE anzulegen......beim nächsten mal mache ich es ungefragt
lg Micha
-
Wir haben seit ein paar Wochen den S8 MaxV Ultra, ich würde mir gerne die Steuerung in die VIS einbauen,
ich finde das sehr kompliziert.
Wir haben auch noch den S5, da habe ich die VIS mit dem mihome Adapter perfekt hinbekommen.
Das lag vor allem daran das ich alles über Buttons steuern konnte.Warum ist das in diesem Adapter nicht möglich oder ich bekomme es mit den Widgets nicht hin.
Ich kann die Datenpunkte (State Value) steuern aber es passiert nichts, z.B. die Stunden der Seitenbürste zu reseten.
Zimmeransteuerung geht anscheinend nur mit einem Skript und nicht direkt.
Ich habe vorerst 10 Programme gespeichert die ich über eine Liste in der VIS auswählen kann, aber halt nur 10.Liegt das alles nur daran der MaxV Ultra noch nicht 100%ig unterstützt wird?
Kommt da noch was? -
Kann es sein, dass der Qrevo Curv noch nicht erkannt wird?
roborock.0 2024-11-01 15:50:00.472 warn Unsupported attribute: dss of get_status with value 168. Please contact the dev to add the newly found attribute of your robot. Model: roborock.vacuum.a135Kann ich dabei irgendwie helfen?
-
@myssv sagte in Neuer Adapter für Roborock-Staubsauger:
Kann ich dabei irgendwie helfen?
Ja, issue auf GitHub erstellen.
-
@da_woody sagte in Neuer Adapter für Roborock-Staubsauger:
Ja, issue auf GitHub erstellen.
Habe ich gemacht. Ich hoffe es war so richtig ...
-
@myssv kann ich nicht sagen, Link auf dein issue wäre nicht schlecht...
-
@da_woody stimmt
https://github.com/copystring/ioBroker.roborock/issues/695
closed [BUG] Neues Modell: Roborock Qrevo Curv #695