Neuer Adapter für Roborock-Staubsauger
-
Schalt mal die Kartenerstellung aus. Wie verhält sich das dann?
-
@copystring sagte in Neuer Adapter für Roborock-Staubsauger:
Schalt mal die Kartenerstellung aus. Wie verhält sich das dann?
Bin am testen, melde mich
@thomas-braun sagte in Neuer Adapter für Roborock-Staubsauger:
und
Debian 10 (buster)ist tot. Installier da ein lebendes Release.Ich weiß
 aber Updates kommen noch jede Woche.
aber Updates kommen noch jede Woche.
Ich setze grade auf einen zweiten NUC alles neu auf. Hab da noch meine Probleme: Privilegierter Container, File Server,...
Dieser sol dan als BackUp laufen -
-
@vumer sagte in Neuer Adapter für Roborock-Staubsauger:
Ich weiß aber Updates kommen noch jede Woche.
Das ist aber schon seit Monaten abgekündigt, nicht Wochen. Ebenso wie deine nodejs-Version.
-
@thomas-braun sagte in Neuer Adapter für Roborock-Staubsauger:
@vumer sagte in Neuer Adapter für Roborock-Staubsauger:
Nodejs v18.17.1; NPM 9.6.7;
Bring das auf Stand.
iob stop iob fix iob nodejs-updatejetzt aber
======================= SUMMARY ======================= v.2023-10-10 Failed to query system properties: Connection timed out Installation: lxc Kernel: x86_64 Userland: amd64 Failed to query server: Connection timed out Timezone: User-ID: 1001 X-Server: false Boot Target: graphical.target Pending OS-Updates: 0 Pending iob updates: 0 Nodejs-Installation: /usr/bin/nodejs v18.20.2 /usr/bin/node v18.20.2 /usr/bin/npm 10.5.0 /usr/bin/npx 10.5.0 /usr/bin/corepack 0.25.2 Recommended versions are nodejs 18.20.2 and npm 10.5.0 Your nodejs installation is correct MEMORY: total used free shared buff/cache available Mem: 3.6G 205M 2.6G 0.0K 737M 3.4G Swap: 4.1G 0B 4.1G Total: 7.7G 205M 6.7G Active iob-Instances: 1 Active repo(s): stable ioBroker Core: js-controller 5.0.19 admin 6.13.16 ioBroker Status: iobroker is not running on this host. Objects type: jsonl States type: jsonl Status admin and web instance: system.adapter.admin.0 : admin : iobroker - enabled, port: 8081, bind: 0.0.0.0 (SSL), run as: admin system.adapter.web.0 : web : iobroker - enabled, port: 8082, bind: 0.0.0.0, run as: admin Objects: 11662 States: 8141 Size of iob-Database: 21M /opt/iobroker/iobroker-data/objects.jsonl 15M /opt/iobroker/iobroker-data/objects.json.migrated 15M /opt/iobroker/iobroker-data/objects.json.bak.migrated 27M /opt/iobroker/iobroker-data/states.jsonl 1.4M /opt/iobroker/iobroker-data/states.json.migrated 1.4M /opt/iobroker/iobroker-data/states.json.bak.migrated =================== END OF SUMMARY ==================== -
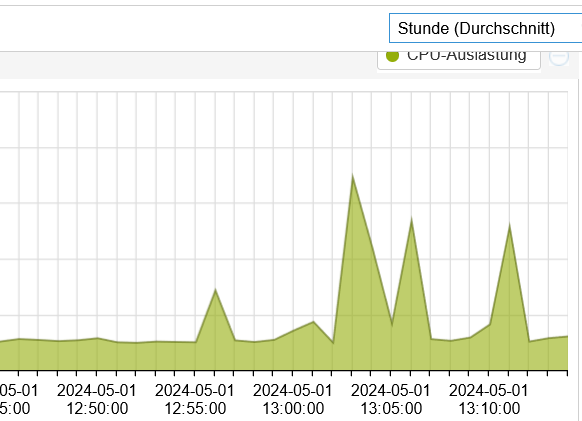
@vumer sagte in Neuer Adapter für Roborock-Staubsauger:
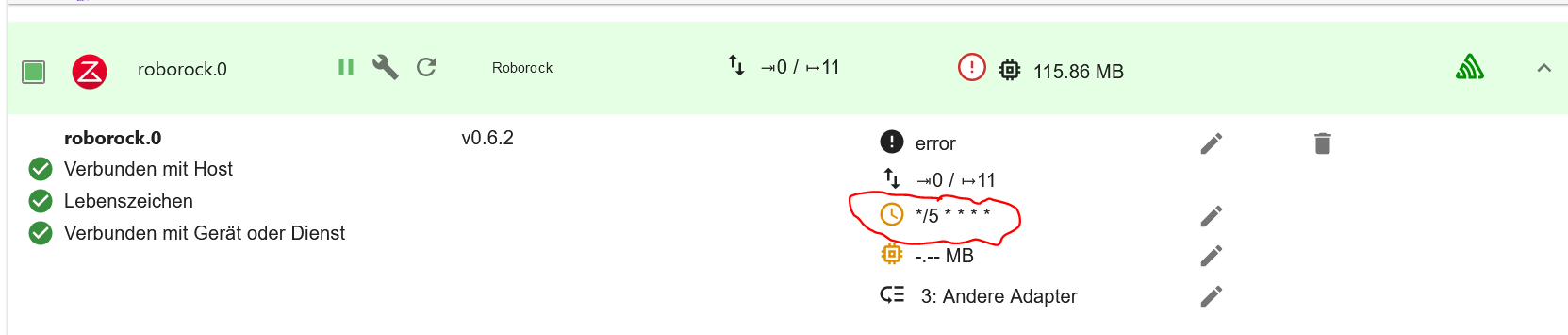
Die Auslastung ist alle 5 min, obwohl 4 min eingestellt sind.
hier sind die 5 min
-
@copystring
gibt es ein Grund warum der Adapter alle 5 min neu startet? -
@vumer ja, weil du das so eingestellt hast. Der Adapter kommt nicht so.
-
@copystring sagte in Neuer Adapter für Roborock-Staubsauger:
Der Adapter kommt nicht so.
Danke

kann mich einfach nicht erinnern wann und warum ich das gemacht habe -
Hallo,
habe die neue Version installiert, jetzt kommt alle paar Minuten folgen Fehlermeldung.
Was kann man dagegen machen?
roborock.0 255824 2024-05-01 18:52:27.855 warn Failed to execute app_get_dryer_setting on robot 1C1S4NyKhoALOuqyi5ovnr Error: Local request with id 1782 with method app_get_dryer_setting timed out after 10 seconds roborock.0 255824 2024-05-01 18:52:27.766 warn Failed to execute get_room_mapping on robot 1C1S4NyKhoALOuqyi5ovnr Error: Local request with id 1781 with method get_status timed out after 10 seconds roborock.0 255824 2024-05-01 18:52:17.804 warn Failed to execute get_smart_wash_params on robot 1C1S4NyKhoALOuqyi5ovnr Error: Local request with id 1780 with method get_smart_wash_params timed out after 10 seconds roborock.0 255824 2024-05-01 18:52:17.735 warn Failed to execute get_status on robot 1C1S4NyKhoALOuqyi5ovnr Error: Local request with id 1779 with method get_status timed out -
@m0skit0 Hi, setzt du die Datenpunkte für den Raum und für den Start gleichzeitig oder Zeitversetzt?
Ich setzt bei mir immer erst die Räume und die Saug und Wischmodies und mit einem kleinen Zeitversatz, bei mir 250 Millisekunden, dann den Start (segment_clean). Wenn ich das nicht so gemacht habe, hat der Robo teilweise nicht das gemacht was ich wollte. Allerdings hatte ich das Problem auch schon bei der Version 0.4.4 (dev) -
hat keiner Fehlermeldung von dem Adapter? Wenn ich den Online habe, macht er mir das Protokoll voll..
-
@longbow said in Neuer Adapter für Roborock-Staubsauger:
hat keiner Fehlermeldung von dem Adapter? Wenn ich den Online habe, macht er mir das Protokoll voll..
Bei mir auch


-
Ja scheint wohl seit letztem Monat "normal" zu sein. Kommt weiter oben schon vor... Man kann wohl entweder auf die vorherige Version zurück oder auf die dev...
-
Wo finde ich die Dev Version….. ?
-
@longbow sagte in Neuer Adapter für Roborock-Staubsauger:
Wo finde ich die Dev Version….. ?
Ist oben irgendwo verlinkt
-
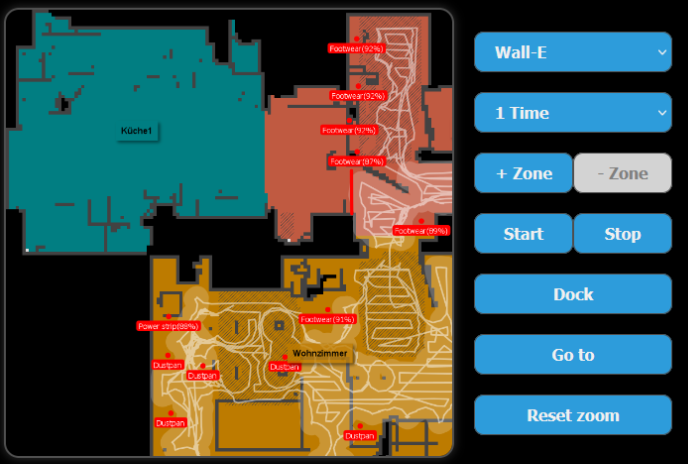
Kann man bei der Karte den Sichtbereich so einstellen, dass man die ganze Karte per default sieht?
Wenn ich die Kartenqualität verändere wird auch der Zoom verändert. das hier ist mit Qualität 6
-
Was kann ich gegen folgende Einträge machen?
roborock.0 2024-06-09 16:31:06.809 warn Failed to map rooms. You need to name your rooms via the mobile app on your phoneDie Kartenerzeugung habe ich im Adapter deaktiviert und die Räume sind in der App bennannt.
-
Hei zusammen, ich bin noch etwas neu und versuche mich gerade an meiner Visualisierung für den Roboter (Qrevo). Ich nutze Lovelace für meine Visualisierung.
In den folgenden Punkten komme ich leider nicht weiter und würde mich über Hilfe freuen.- Einen Verlauf über die gemachten Fahrten. Ich kenne die Datenpunkte und weiß auch das es eine JSON dafür gibt, leider zu unerfahren, um daraus mit Blocky eine Liste zu erstellen, welche in eine Datei schreib, welche ich dann via Markdown in meine Vis einbauen kann. (So habe ich das mit einer anderen (kopierten) Liste gemacht)
- Ich würde gerne in Kombination mit der Zimmerreinigung einstellen können, ob Saugen, Wischen oder beides gemacht werden soll. Die Zimmer bekomme ich bereits ausgewählt und kann mittels: app_segment_clean eine Reinigung für die Räume starten, allerdings ist dies ausschließlich Saugen und Wischen. Ich hatte gelesen, dass man den Datenpunkt commands.set_water_box_custom_mode veränder soll, um nur zu saugen. Das Setzen funktioniert auch und der Roboter pipt, aber in Kombination habe ich das Ganze noch nicht zum Laufen gebracht. Verwendet hatte ich dort den Wert 200. Ich dachte vlt. gibt es aber einen Datenpunkt dafür, den ich noch nicht kenne.
Adapterversion 0.6.4
Hoffe ihr könnt mir weiterhelfen. LG
-
Hallo an alle,
ich habe seit dem update auf 0.6.4 das problem das meine karte im Fierfox oder edge Chrome angezeigt wird wie sie sein muss.
Aber wenn ich auf go to drücke, und ein Ziel wähle die maus mit dem Blauen zeichen versätz sind auf der karte. Dan startet der Sauger. aber sagt dann ziel kann nicht angefahren werden.
älterer version zurück oder löschen hat nix gebracht.Sauger ist ein S8 Pro ultra