

Test Adapter pid (pid-Regler) V1.0.x
-
@paul53 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@lenny-cb
Siehe hier und Folgebeiträge. Heizstab ca. 800 W. Es ist selbst bei Xp = 2 * Heizstableistung noch instabil.Dein Beispiel bedeutet P-Regler mit Xp = 6000 und Sollwert (Überschuss) = 3000.
Ich raffe es einfach nicht. In dem Beispiel aus dem Link soll ein WR gesteuert werden. Quasi eine Null-Einspeisung.
Wenn bei mir die Leistung da ist, wird die entweder eingespeist oder verbraucht.Brauche ich doch keine "Regelung" in dem Sinne.
Ist doch wie "Leistung da = AN" oder "Leistung nicht da = AUS" nur eben mit Werten zwischen 0-10V.
@lenny-cb sagte: WR gesteuert werden. Quasi eine Null-Einspeisung.
Das Ziel ist gleich: Null-Einspeisung. Du steuerst keinen WR, sondern einen Verbraucher (Heizstab). Damit kehrt sich lediglich die Richtung um.
Bitte verzichtet auf Chat-Nachrichten, denn die Handhabung ist grauenhaft !
Produktiv: Asus PN 42 / N100 / 8 GB / 500 GB; Proxmox mit 2 VM (iob / openCCU) -
@lenny-cb sagte: WR gesteuert werden. Quasi eine Null-Einspeisung.
Das Ziel ist gleich: Null-Einspeisung. Du steuerst keinen WR, sondern einen Verbraucher (Heizstab). Damit kehrt sich lediglich die Richtung um.
@paul53 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@lenny-cb sagte: WR gesteuert werden. Quasi eine Null-Einspeisung.
Das Ziel ist gleich: Null-Einspeisung. Du steuerst keinen WR, sondern einen Verbraucher (Heizstab). Damit kehrt sich lediglich die Richtung um.
korrekt, ich bin immer noch am überlegen was da mit dem Script schwingen soll.
Wenn ich sekündlich eine Leistung vorgebe und nicht ganz treffe, schlägt die drüber oder drunter. Wird ja in der nächsten Sekunde korrigiert. Das ist doch m.M. ein P-Regler. Abtastung --> Sprungantwort, Abtastung --> Sprungantwort.
Naja, egal. -
@paul53 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@lenny-cb sagte: WR gesteuert werden. Quasi eine Null-Einspeisung.
Das Ziel ist gleich: Null-Einspeisung. Du steuerst keinen WR, sondern einen Verbraucher (Heizstab). Damit kehrt sich lediglich die Richtung um.
korrekt, ich bin immer noch am überlegen was da mit dem Script schwingen soll.
Wenn ich sekündlich eine Leistung vorgebe und nicht ganz treffe, schlägt die drüber oder drunter. Wird ja in der nächsten Sekunde korrigiert. Das ist doch m.M. ein P-Regler. Abtastung --> Sprungantwort, Abtastung --> Sprungantwort.
Naja, egal. -
@paul53 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@lenny-cb sagte: was da mit dem Script schwingen soll.
Teste es!
Habe ich mich schon für deine Geduld bedankt?! :-) DANKE!
Das mit dem Schwingen kann ich nur nachvollziehen wenn der WR die Leistung am Heizstab einstellen muss.
Muss er aber nicht, die Leistung ist da, weil er ohne Begrenzung erzeugt.
Wird nur halt nicht eingespeist sondern verbraucht.Ich mache es immer gern mit Beispielen:
Erzeugung 10000W (im Beispiel konstant)
Sekunde 1: 6000W am Heizstab abrufen --> 4000W einspeisen
Sekunde 2: 1000W am Heizstab abrufen --> 9000W einspeisen
usw.Was soll da schwingen und wo?
Ich wills nur verstehen. :-) -
@paul53 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@lenny-cb sagte: was da mit dem Script schwingen soll.
Teste es!
Habe ich mich schon für deine Geduld bedankt?! :-) DANKE!
Das mit dem Schwingen kann ich nur nachvollziehen wenn der WR die Leistung am Heizstab einstellen muss.
Muss er aber nicht, die Leistung ist da, weil er ohne Begrenzung erzeugt.
Wird nur halt nicht eingespeist sondern verbraucht.Ich mache es immer gern mit Beispielen:
Erzeugung 10000W (im Beispiel konstant)
Sekunde 1: 6000W am Heizstab abrufen --> 4000W einspeisen
Sekunde 2: 1000W am Heizstab abrufen --> 9000W einspeisen
usw.Was soll da schwingen und wo?
Ich wills nur verstehen. :-)@lenny-cb sagte: Was soll da schwingen und wo?
Ob die Regelung stabil ist, hängt auch vom Zeitverhalten (Totzeit / Anstiegszeit) der Regelstrecke ab. Regelstrecke: Stellsignal --> MQTT --> Wemos --> 0-10V-Modul --> Thyristorsteller --> Smartmeter --> Adapter-Datenpunkt "Überschuss"
Bitte verzichtet auf Chat-Nachrichten, denn die Handhabung ist grauenhaft !
Produktiv: Asus PN 42 / N100 / 8 GB / 500 GB; Proxmox mit 2 VM (iob / openCCU) -
@lenny-cb sagte: Was soll da schwingen und wo?
Ob die Regelung stabil ist, hängt auch vom Zeitverhalten (Totzeit / Anstiegszeit) der Regelstrecke ab. Regelstrecke: Stellsignal --> MQTT --> Wemos --> 0-10V-Modul --> Thyristorsteller --> Smartmeter --> Adapter-Datenpunkt "Überschuss"
@paul53 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@lenny-cb sagte: Was soll da schwingen und wo?
Ob die Regelung stabil ist, hängt auch vom Zeitverhalten (Totzeit / Anstiegszeit) der Regelstrecke ab. Regelstrecke: Stellsignal --> MQTT --> Wemos --> 0-10V-Modul --> Thyristorsteller --> Smartmeter --> Adapter-Datenpunkt "Überschuss"
Wenn die Summe aller Zeiten jedes einzelnen "Mitspielers" größer ist als die Taktzeit im WEMOS wirds kritisch?
Ist das mit "schwingen" oder "instabil" gemeint? -
ich habe mal Fragen zu dem Adapter. Vorweg, Regelungstechnik war in meinem Studium immer ein Buch mit 7 Siegeln.

Ich würde das gern mit einem Heizstab und einem Thyristorsteller (Schwingungspaketsteuerung) nutzen. Es soll PV-Überschuss genutzt werden.
Der Thyristorsteller braucht 0-10V um die Leistung von 0-6000W zu regeln.Da ich am PID nicht Leistung reingeben (auswerten) kann und eine "Regelspannung" ausgeben kann, muss ich das wohl vorher "konvertieren".
Ansatz 1:
Leistung (0-6kW) proportional in eine Spannung (0-10V) konvertieren und dann den Regler füttern.Ansatz 2:
Man könnte doch auch den Überschuss prüfen und mittels Script den Leistungswert errechnen.Also:
prüfe alle x Sekunden --> (PVÜ - 100W) * 6000W /10VPVÜ = Überschuss
100W = ich nenne es mal Reserve vor Netzbezug
6000W = max Leistung des Heizstab
10V = kommt von 0-10VOder anders gefragt, wie würdet ihr das angehen?
Leistung ausregeln oder Leistungssprünge.
@lenny-cb also Die Frage ist, ob Du damit erreichen möchtest, dass die überschüssige Energie selbst verbraucht wird, oder ob auch im Vordergund steht, dass so gut wie nichts bezogen wird?
Bei zweiterem wäre der Regler sinnvoll.
Würde direkt auf den Netzwerte (bspw. -100W) regeln. Die Stellgröße also wären dann 0-6000W an den Wemos senden.
Den dann die Konvertierung auf 0-10V machen lassen.soll nur eine überschüssige Leistung genutzt werden, wäre vielleicht alle Minute oder so prüfen auch ne Lösung. Würde zu Max Ben minütigen Bezug führen, aber die Energy wäre ja im Wasser und nicht komplett weg.
Ist nur meine Meinung dazu.
-
@mcm57 ich möchte nicht drängeln, aber gibt es schon einen Zeitraum, wann die nächste Version zum Testen bereitsteht? Ich bin bereit...
@fu_zhou
Neine du drängelst nicht. Ich bin dir und alle anderen SEHR dankbar für eure Zeit zum Testen.Alle Jiras die mit to be tested markiert sind sind implementiet und in meinem fork Repo mcm1957/ioBroker.pid umgesetzt. Ich möchte / wollte die Funktionen nur noch explizit durchtesten bevor ich wieder andere beschäftige :-). Leider hat mir eine Fehler in Rules einiges an Zeit gekostet. Rules rechnet nämlich im 2 States module statt A=A-B A=B-A ... (https://github.com/ioBroker/ioBroker.javascript/issues/1291) und damit hab ich beim Test der Inverteirung natürlich kein vernünftiges Verhalten bekommen. Nur kann man da im Adaopter lange suchen :-(.
Egal - ich hoffe ich kann die nächet Version im community Bereich heute od. morgen releasen. Die wär dann zwar noch imer alpha aber vergessene Codeteile wie das invert sollte es dann nicht mehr geben. Wenn wer mag, kann er natürlich jederzeit die head von mcm1957/ioBroker.pid nehmen. Das ist meine Arbeitsversion. Da kann sich nur jederzeit was ändern.
Danke nochmals
MartinEntwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@fu_zhou
Neine du drängelst nicht. Ich bin dir und alle anderen SEHR dankbar für eure Zeit zum Testen.Alle Jiras die mit to be tested markiert sind sind implementiet und in meinem fork Repo mcm1957/ioBroker.pid umgesetzt. Ich möchte / wollte die Funktionen nur noch explizit durchtesten bevor ich wieder andere beschäftige :-). Leider hat mir eine Fehler in Rules einiges an Zeit gekostet. Rules rechnet nämlich im 2 States module statt A=A-B A=B-A ... (https://github.com/ioBroker/ioBroker.javascript/issues/1291) und damit hab ich beim Test der Inverteirung natürlich kein vernünftiges Verhalten bekommen. Nur kann man da im Adaopter lange suchen :-(.
Egal - ich hoffe ich kann die nächet Version im community Bereich heute od. morgen releasen. Die wär dann zwar noch imer alpha aber vergessene Codeteile wie das invert sollte es dann nicht mehr geben. Wenn wer mag, kann er natürlich jederzeit die head von mcm1957/ioBroker.pid nehmen. Das ist meine Arbeitsversion. Da kann sich nur jederzeit was ändern.
Danke nochmals
Martin@mcm57 Ich bin grade am testen:
- Die Ordnerstruktur finde ich echt gut
- "hold", um den Regler zu pausieren und "run", um den aktuellen Status zu zeigen, ist super
- "supr" um Rauschunterdrückung zu melden (und damit diff = 0 zu erklären trotz Regelabweichung) ist auch klasse
- "hold" auf "false" und dann wieder "true" => Zyklus wird weiterhin eingehalten
- bei "hold" (run = false) pausiert der Regler "echt" = im Hintergrund wird "y" nicht neu ermittelt und angesprungen, wenn "hold" = "false" gesetzt wird.
Bis jetzt funktioniert alles, echt stark!
Synology DS920+ VM, S7-315 PN mit ET200S
-
@mcm57 Ich bin grade am testen:
- Die Ordnerstruktur finde ich echt gut
- "hold", um den Regler zu pausieren und "run", um den aktuellen Status zu zeigen, ist super
- "supr" um Rauschunterdrückung zu melden (und damit diff = 0 zu erklären trotz Regelabweichung) ist auch klasse
- "hold" auf "false" und dann wieder "true" => Zyklus wird weiterhin eingehalten
- bei "hold" (run = false) pausiert der Regler "echt" = im Hintergrund wird "y" nicht neu ermittelt und angesprungen, wenn "hold" = "false" gesetzt wird.
Bis jetzt funktioniert alles, echt stark!
@fu_zhou
Ich bin grad am release der 0.0.3-alpha.0.
Sollte nicht mehr viel Unterschied zu der mcm1957 Version sein. Ein paar Texte wurden noch korrigioert bzw. ergänzt. Das ist aber Cosmetic.Sobald Releasebau grün ist und Testinstallation bei mir gut ging kommt Infoposting.
Gröberer Umbauten (wie zuletzt die Ordnerstruktur) möchte ich nunmehr vermeiden und zunächst nurmehr Bugs fixen.Verlinkung zu anderen States und ev. weitere Feature werde ich zunächste zurückstellen und erst in 0.1.x einbauen. Ich möchte sobald als möglich in einen "offiziellen" beta Tests incl. Aufnahmeantrag ins Lates Repo gehen.
DANKE dir nochmals für deine Testmühe und Feedback.
-
@mcm57 Ich bin grade am testen:
- Die Ordnerstruktur finde ich echt gut
- "hold", um den Regler zu pausieren und "run", um den aktuellen Status zu zeigen, ist super
- "supr" um Rauschunterdrückung zu melden (und damit diff = 0 zu erklären trotz Regelabweichung) ist auch klasse
- "hold" auf "false" und dann wieder "true" => Zyklus wird weiterhin eingehalten
- bei "hold" (run = false) pausiert der Regler "echt" = im Hintergrund wird "y" nicht neu ermittelt und angesprungen, wenn "hold" = "false" gesetzt wird.
Bis jetzt funktioniert alles, echt stark!
Ich habe nun die neueste und (hoffentlich) letzte ALPHA Release 0.0.3-alpha.0 erstellt.
- neu: Eine optionale Ordnerstruktur für Zustände wurde implementiert.
- geändert: Timer wird bei Neustart nach Pausierung nun resetted.
- geändert: Werte für act und set werden nun gespeichert und beim Starten des Adapters verwendet
- geändert: Zustandsänderungen mit ack=true werden gelogged
- geändert: Falsche Updates beim Schreiben des act Zustands werden nun verhindert
- geändert: Funktionsfehler des Invert-Flags wurden behoben
- geändert: Die Fehleranzeige beim Erreichen der Limits wurde entfernt.
- geändert: q-Flag-Handling wurde korrigiert
- geändert: Unerwartetes Verhalten des sup-Parameters wurde behoben
- geändert: Der Eingabe-Zustand 'run' wurde auf 'hold' umbenannt."
Die bekannten Probleme sollten nun behoben sein. Die gewünschte Ordnerstruktur wurde (optional und per Default) umgesetzt.
Bekannte Probleme siehe Issues im Repository.
Falls wer Zeit zum Testen hat - ich sage ganz ganz herzlich Danke wenn ihr es versucht. Falls was nicht gehtr bitte Bescheid geben. Falls alles ok scheint, bitte auch kurz sagen.
DANKE
MartinEntwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
Ich habe nun die neueste und (hoffentlich) letzte ALPHA Release 0.0.3-alpha.0 erstellt.
- neu: Eine optionale Ordnerstruktur für Zustände wurde implementiert.
- geändert: Timer wird bei Neustart nach Pausierung nun resetted.
- geändert: Werte für act und set werden nun gespeichert und beim Starten des Adapters verwendet
- geändert: Zustandsänderungen mit ack=true werden gelogged
- geändert: Falsche Updates beim Schreiben des act Zustands werden nun verhindert
- geändert: Funktionsfehler des Invert-Flags wurden behoben
- geändert: Die Fehleranzeige beim Erreichen der Limits wurde entfernt.
- geändert: q-Flag-Handling wurde korrigiert
- geändert: Unerwartetes Verhalten des sup-Parameters wurde behoben
- geändert: Der Eingabe-Zustand 'run' wurde auf 'hold' umbenannt."
Die bekannten Probleme sollten nun behoben sein. Die gewünschte Ordnerstruktur wurde (optional und per Default) umgesetzt.
Bekannte Probleme siehe Issues im Repository.
Falls wer Zeit zum Testen hat - ich sage ganz ganz herzlich Danke wenn ihr es versucht. Falls was nicht gehtr bitte Bescheid geben. Falls alles ok scheint, bitte auch kurz sagen.
DANKE
Martin@mcm57 Soweit alles gut,
ich habe nur bei etwas spielen folgendes bemerkt:
wenn man den Regler mit hold = true stoppe und dann einen
Rest mit rst = true mache, dann springt y nicht auf 0, sondern auf den neu berechneten Wert.
=> Wenn man den Regler eine gewisse Zeit angehalten hat und dann RST betätigt, springt er in die maximale Begrenzung (und man kann ihn somit im Zustand Hold nicht auf 0 zurück setzen.
(Wie kann man eigentlich den einzelnen I Anteil resetten?)
=> Das wird bei manchen Anwendungenbenötigt... ok, sind Zeitkritische, die wird man sicher nicht mit ioBroker Lösen. Von daher denke ich nicht so wichtig.Aber könnte man beim Reset nicht das delta der Zeit auf 0 setzen, sodass der Regler wirklich bei 0 beginnt? (Wie im ersten Zyklus). Und eben wenn er auf hold = true ist auch nicht den P-Anteil ausgibt?
das Delta bzw. die Zeit würde ich während hold = true nicht weiter laufen lassen -
@mcm57 Soweit alles gut,
ich habe nur bei etwas spielen folgendes bemerkt:
wenn man den Regler mit hold = true stoppe und dann einen
Rest mit rst = true mache, dann springt y nicht auf 0, sondern auf den neu berechneten Wert.
=> Wenn man den Regler eine gewisse Zeit angehalten hat und dann RST betätigt, springt er in die maximale Begrenzung (und man kann ihn somit im Zustand Hold nicht auf 0 zurück setzen.
(Wie kann man eigentlich den einzelnen I Anteil resetten?)
=> Das wird bei manchen Anwendungenbenötigt... ok, sind Zeitkritische, die wird man sicher nicht mit ioBroker Lösen. Von daher denke ich nicht so wichtig.Aber könnte man beim Reset nicht das delta der Zeit auf 0 setzen, sodass der Regler wirklich bei 0 beginnt? (Wie im ersten Zyklus). Und eben wenn er auf hold = true ist auch nicht den P-Anteil ausgibt?
das Delta bzw. die Zeit würde ich während hold = true nicht weiter laufen lassen@ben1983 said in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
wenn man den Regler mit hold = true stoppe und dann einen
Rest mit rst = true mache, dann springt y nicht auf 0, sondern auf den neu berechneten Wert.RST resetted (nur) den I Anteil. Damit sollte der Adapter auf jenen Wert springen, den er ganz zu Beginn einer Berechnung hat, d.h. auf diff * kp.
=> Wenn man den Regler eine gewisse Zeit angehalten hat und dann RST betätigt, springt er in die maximale Begrenzung (und man kann ihn somit im Zustand Hold nicht auf 0 zurück setzen.
Ob der Regler angehalten ist oder nicht sollte hier eigentlich keine Rolle spielen. Bei RST sollte der Regler auf diff*kp "springen". Das kann durchaus in der Begrenzung liegen. RST resetted den I Anteil. Will man y auf null zwingen kann man MAN / MAN_INP verwenden. Beim ersten Rechenzyklus wird y aber jedenfalls auf y=(set-act)*kp + off springen.
Wir hatten ganz am Anfang schon die Diskussion dass RST eben NICHT alles auf null setzen soll, weil dann der Regler jedesmal auf 0 springt und dann sofort wieder auf den Regelwert zurück. Das ist nicht sinnvoll war die einhellige Meinung.
(Wie kann man eigentlich den einzelnen I Anteil resetten?)
=> Das wird bei manchen Anwendungenbenötigt... ok, sind Zeitkritische, die wird man sicher nicht mit ioBroker Lösen. Von daher denke ich nicht so wichtig.Genau das macht RST. (außer es funktioniert nicht :-)
Das kannst du kontrollieren indem nach RST y=(act-set)*kp + off sein sollte.Aber könnte man beim Reset nicht das delta der Zeit auf 0 setzen, sodass der Regler wirklich bei 0 beginnt? (Wie im ersten Zyklus). Und eben wenn er auf hold = true ist auch nicht den P-Anteil ausgibt?
Das Delta wird beim Start auf null gesetzt damit sich kein astronomischer I Anteil (bei langer Pause) ergibt.
das Delta bzw. die Zeit würde ich während hold = true nicht weiter laufen lassen
Da die Systemzeit nicht angehalten werden kann :-) bewirkt das Rücksetzen der Zeitdifferenz beim starten (hold geht auf false) genau das. Im Ersten Berchnungszyklus nach hold bleibt der integralanteil unverändert und der differentialanteil wird ausgeblendet. Ein theoretisch mögliche genaue Zeitberechnung (Intervall ist 10s, nach 3 sekunden wird wird pausiert, daher integral miot 3s berechnen) ist den Aufwand meiner Ansichtnach nicht Wert. Nach dem Anhalten einer Regelung muss jedenfalls mit Regeloperationen gerechnet werden und hold/run sollte ja auch nicht der Normalzustand sein.
McM
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@ben1983 said in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
wenn man den Regler mit hold = true stoppe und dann einen
Rest mit rst = true mache, dann springt y nicht auf 0, sondern auf den neu berechneten Wert.RST resetted (nur) den I Anteil. Damit sollte der Adapter auf jenen Wert springen, den er ganz zu Beginn einer Berechnung hat, d.h. auf diff * kp.
=> Wenn man den Regler eine gewisse Zeit angehalten hat und dann RST betätigt, springt er in die maximale Begrenzung (und man kann ihn somit im Zustand Hold nicht auf 0 zurück setzen.
Ob der Regler angehalten ist oder nicht sollte hier eigentlich keine Rolle spielen. Bei RST sollte der Regler auf diff*kp "springen". Das kann durchaus in der Begrenzung liegen. RST resetted den I Anteil. Will man y auf null zwingen kann man MAN / MAN_INP verwenden. Beim ersten Rechenzyklus wird y aber jedenfalls auf y=(set-act)*kp + off springen.
Wir hatten ganz am Anfang schon die Diskussion dass RST eben NICHT alles auf null setzen soll, weil dann der Regler jedesmal auf 0 springt und dann sofort wieder auf den Regelwert zurück. Das ist nicht sinnvoll war die einhellige Meinung.
(Wie kann man eigentlich den einzelnen I Anteil resetten?)
=> Das wird bei manchen Anwendungenbenötigt... ok, sind Zeitkritische, die wird man sicher nicht mit ioBroker Lösen. Von daher denke ich nicht so wichtig.Genau das macht RST. (außer es funktioniert nicht :-)
Das kannst du kontrollieren indem nach RST y=(act-set)*kp + off sein sollte.Aber könnte man beim Reset nicht das delta der Zeit auf 0 setzen, sodass der Regler wirklich bei 0 beginnt? (Wie im ersten Zyklus). Und eben wenn er auf hold = true ist auch nicht den P-Anteil ausgibt?
Das Delta wird beim Start auf null gesetzt damit sich kein astronomischer I Anteil (bei langer Pause) ergibt.
das Delta bzw. die Zeit würde ich während hold = true nicht weiter laufen lassen
Da die Systemzeit nicht angehalten werden kann :-) bewirkt das Rücksetzen der Zeitdifferenz beim starten (hold geht auf false) genau das. Im Ersten Berchnungszyklus nach hold bleibt der integralanteil unverändert und der differentialanteil wird ausgeblendet. Ein theoretisch mögliche genaue Zeitberechnung (Intervall ist 10s, nach 3 sekunden wird wird pausiert, daher integral miot 3s berechnen) ist den Aufwand meiner Ansichtnach nicht Wert. Nach dem Anhalten einer Regelung muss jedenfalls mit Regeloperationen gerechnet werden und hold/run sollte ja auch nicht der Normalzustand sein.
McM
@mcm57 Also wenn ich hold auf true setze, dann rst auf true,
dann bekomme ich
nach 10s rst = true den doppelten Wert wie nach 5s rst = true.
Daraus schließe ich, dass dort nicht y=(act-set)*kp + off gerechnet wird, sondern noch das Tn mit rein spielt.das Weiteren:
Wenn ich die hysterese (supr) auf 5 (oder sonst einen Wert setze). Worauf bezieht diese sich denn? Ich dachte auf die regelabweichung, dies ist anscheinend nicht der Fall. oder?
Sonst wäre ja hier diff nicht 0.
ich würde es wie schon mal geschrieben nicht auf eine Änderung beziehen, sondern wirklich auf die Regelabweichung, denn:Wenn die Differenz dauerhaft sagen wir +1/2*Hysterese ist, dann kann der Stellwert und damit der Regler langsam weglaufen.
Wenn die Hysterrese sich auf die Regelabweichung bezieht, kann dies nicht passieren, da spätestens nach dem 2. zyklus die volle hysterrese erreicht wurde und die regelung wieder greift- -
@mcm57 wenn ich Tn bei laufendem Regler verändere, z.B. von 10s auf 2s macht y einen riesen Sprung, z.B. von 4 auf 20, also ca. um den Faktor, um den ich Tn reduziert habe. Umgedreht genauso: von 2s auf 10s kommt ein Sprung von 30 auf 6. Ist das richtig? Ich hätte eher erwartet, dass y entsprechend schneller (10s -> 2s) oder langsamer (2s -> 10s) verändert wird, aber ausgehend vom aktuellen Wert (kein Sprung).
Synology DS920+ VM, S7-315 PN mit ET200S
-
@mcm57 Also wenn ich hold auf true setze, dann rst auf true,
dann bekomme ich
nach 10s rst = true den doppelten Wert wie nach 5s rst = true.
Daraus schließe ich, dass dort nicht y=(act-set)*kp + off gerechnet wird, sondern noch das Tn mit rein spielt.das Weiteren:
Wenn ich die hysterese (supr) auf 5 (oder sonst einen Wert setze). Worauf bezieht diese sich denn? Ich dachte auf die regelabweichung, dies ist anscheinend nicht der Fall. oder?
Sonst wäre ja hier diff nicht 0.
ich würde es wie schon mal geschrieben nicht auf eine Änderung beziehen, sondern wirklich auf die Regelabweichung, denn:Wenn die Differenz dauerhaft sagen wir +1/2*Hysterese ist, dann kann der Stellwert und damit der Regler langsam weglaufen.
Wenn die Hysterrese sich auf die Regelabweichung bezieht, kann dies nicht passieren, da spätestens nach dem 2. zyklus die volle hysterrese erreicht wurde und die regelung wieder greift-@ben1983 sagte in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
Wenn ich die hysterese (supr) auf 5 (oder sonst einen Wert setze). Worauf bezieht diese sich denn? Ich dachte auf die regelabweichung, dies ist anscheinend nicht der Fall. oder?
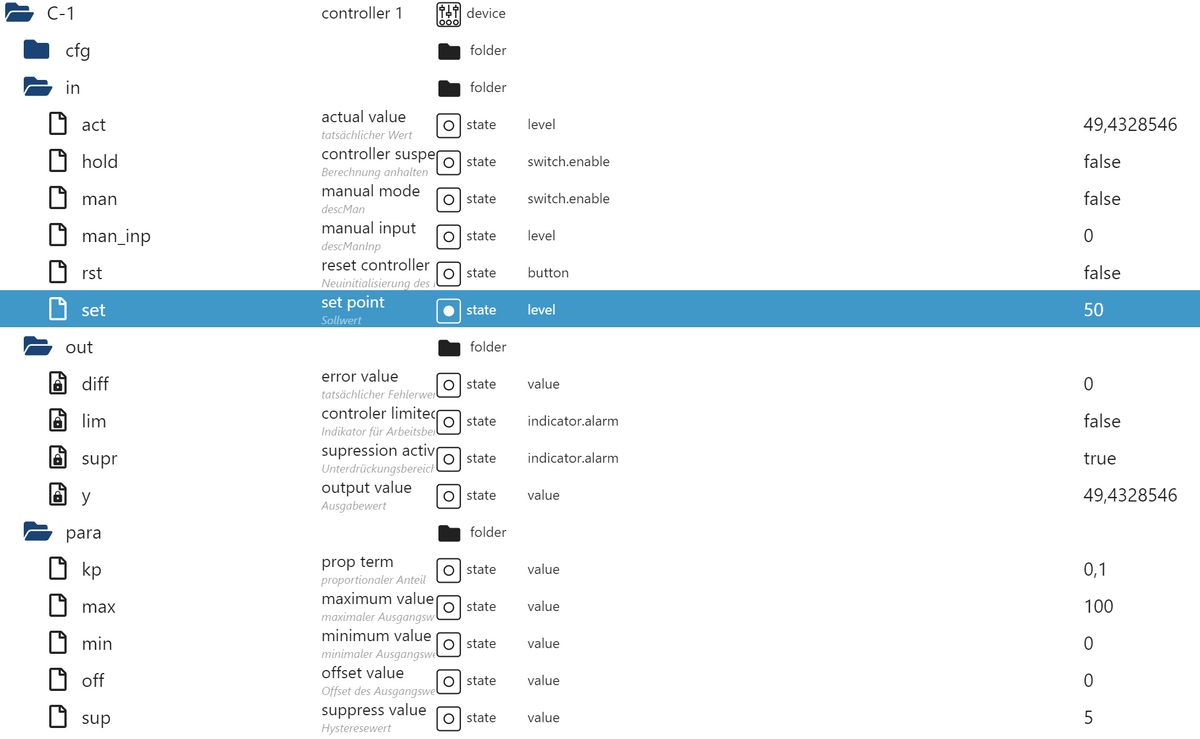
Sonst wäre ja hier diff nicht 0.Das Verhalten stimmt doch: Dein set = 50, dein act = 49,43, damit ist die Regelabweichung < 5 (dein sup), damit wird diff = 0 und supr = true
Synology DS920+ VM, S7-315 PN mit ET200S
-
@mcm57 Also wenn ich hold auf true setze, dann rst auf true,
dann bekomme ich
nach 10s rst = true den doppelten Wert wie nach 5s rst = true.
Daraus schließe ich, dass dort nicht y=(act-set)*kp + off gerechnet wird, sondern noch das Tn mit rein spielt.das Weiteren:
Wenn ich die hysterese (supr) auf 5 (oder sonst einen Wert setze). Worauf bezieht diese sich denn? Ich dachte auf die regelabweichung, dies ist anscheinend nicht der Fall. oder?
Sonst wäre ja hier diff nicht 0.
ich würde es wie schon mal geschrieben nicht auf eine Änderung beziehen, sondern wirklich auf die Regelabweichung, denn:Wenn die Differenz dauerhaft sagen wir +1/2*Hysterese ist, dann kann der Stellwert und damit der Regler langsam weglaufen.
Wenn die Hysterrese sich auf die Regelabweichung bezieht, kann dies nicht passieren, da spätestens nach dem 2. zyklus die volle hysterrese erreicht wurde und die regelung wieder greift-@ben1983 said in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
@mcm57 Also wenn ich hold auf true setze, dann rst auf true,
dann bekomme ich
nach 10s rst = true den doppelten Wert wie nach 5s rst = true.
Daraus schließe ich, dass dort nicht y=(act-set)*kp + off gerechnet wird, sondern noch das Tn mit rein spielt.OK, muss ich mir ansehen
Danke f.d. genaue Beschreibugn was du tust -
@mcm57 wenn ich Tn bei laufendem Regler verändere, z.B. von 10s auf 2s macht y einen riesen Sprung, z.B. von 4 auf 20, also ca. um den Faktor, um den ich Tn reduziert habe. Umgedreht genauso: von 2s auf 10s kommt ein Sprung von 30 auf 6. Ist das richtig? Ich hätte eher erwartet, dass y entsprechend schneller (10s -> 2s) oder langsamer (2s -> 10s) verändert wird, aber ausgehend vom aktuellen Wert (kein Sprung).
@fu_zhou
Da sich der Integralwert nicht ändert ist das lt. angegebener Formel das implementierte und zu erwartende Verhalten. Es wird der Fehlerwert integriert und geht mit dem angegebenen Faktor in das Ergebnis ein.Ich kann deine Erwartung im Prinzip verstehen. Anderseits wird ein Ändern von kp auch einen Sprung auslösen und nicht "irgendwie gleitend" auf den neuen Wert gehen.
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@ben1983 sagte in Test neuer Adapter pid (pid-Regler) V0.0.3-alpha.x:
Wenn ich die hysterese (supr) auf 5 (oder sonst einen Wert setze). Worauf bezieht diese sich denn? Ich dachte auf die regelabweichung, dies ist anscheinend nicht der Fall. oder?
Sonst wäre ja hier diff nicht 0.Das Verhalten stimmt doch: Dein set = 50, dein act = 49,43, damit ist die Regelabweichung < 5 (dein sup), damit wird diff = 0 und supr = true
@fu_zhou Du hast Recht. Da war ich wohl eben etwas durcheinander und habe es selber nicht gemerkt, dass die Regelabweichung < 5 ist.
@mcm57 ich denke was mich hier verwirrt hat ist, dass Diff als 0 angezeigt wir und die Regelabweichung ja nicht 0 ist, oder was zeigst Du als Diff an?
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
353
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge