

Neuer Robonect HX Adapter
-
Gibt es für Robonect eine App, ich finde leide keine im Playstore. Bzw es gibt keine mehr, hbat jemand evtl die APK
-

Bei dem rechten Motor wird mir -4cm/s angezeigt. In der Weboberfläche vom Robonect stehen 0cm/s
@Malz1902 Hallo,
die Werte im Iobroker Robonect Adapter sind ja immer Momentanwerte, die je nach eingestelltem Intervall abgefragt bzw. gesendet werden. Mit der Direktverbindung hat man natürlich immer die aktuelleren Werte.
Im Adapter kann man die Intervalle für Status und Info getrennt einstellen.Zu deiner vorherigen Frage. Ja man kann den Mode beschreiben. Über die Visu kann man den entsprechenden States setzen und an Robonect übertragen. Bei mir läuft ein Blockly, das ich hier aus dem Forum Habe.
Start und Stop nutze ich nicht, aber Home, End of Day, Job und Auto.
Im Robonect Forum gibt es auch tolle Beiträge zu dem Thema. Ist leider nicht so gut sortiert wie hier.Gruß Uwe
-
robonect.0 2020-05-27 08:20:47.262 error (2989) Error: No GPS installedKönnte man vielleicht überlegen für eine nächste Version das man im Adapter sagen kann das man GPS hat, der ballert so das ganze log voll^^
@Malz1902 said in Neuer Robonect HX Adapter:
Was macht der Mode Job denn?
Mit "Job" könnte man den Mäher einmalig zu einer bestimmten Zeit für eine bestimmte Zeit loslaufen lassen. Also genau das, was man im Robonect Webintrface auch machen kann. Der Modus ist aber nicht 100%ig im Adapter implementiert, so dass Du damit den Mäher nur sofort losschicken kannst und er wieder in die Station fährt, wenn der Akku zur Neige geht.
@Malz1902 said in Neuer Robonect HX Adapter:
Könnte man vielleicht überlegen für eine nächste Version das man im Adapter sagen kann das man GPS hat, der ballert so das ganze log voll^^
Wenn Du kein GPS hast, dann musst Du in der Konfiguration den GPS Abfragetype auf "nicht abfragen" stellen und schon wird das auch nicht mehr im Log als Fehler auftauchen.
-
@Malz1902 said in Neuer Robonect HX Adapter:
Was macht der Mode Job denn?
Mit "Job" könnte man den Mäher einmalig zu einer bestimmten Zeit für eine bestimmte Zeit loslaufen lassen. Also genau das, was man im Robonect Webintrface auch machen kann. Der Modus ist aber nicht 100%ig im Adapter implementiert, so dass Du damit den Mäher nur sofort losschicken kannst und er wieder in die Station fährt, wenn der Akku zur Neige geht.
@Malz1902 said in Neuer Robonect HX Adapter:
Könnte man vielleicht überlegen für eine nächste Version das man im Adapter sagen kann das man GPS hat, der ballert so das ganze log voll^^
Wenn Du kein GPS hast, dann musst Du in der Konfiguration den GPS Abfragetype auf "nicht abfragen" stellen und schon wird das auch nicht mehr im Log als Fehler auftauchen.
@braindead said in Neuer Robonect HX Adapter:
@Malz1902 said in Neuer Robonect HX Adapter:
Was macht der Mode Job denn?
Mit "Job" könnte man den Mäher einmalig zu einer bestimmten Zeit für eine bestimmte Zeit loslaufen lassen. Also genau das, was man im Robonect Webintrface auch machen kann. Der Modus ist aber nicht 100%ig im Adapter implementiert, so dass Du damit den Mäher nur sofort losschicken kannst und er wieder in die Station fährt, wenn der Akku zur Neige geht.
@Malz1902 said in Neuer Robonect HX Adapter:
Könnte man vielleicht überlegen für eine nächste Version das man im Adapter sagen kann das man GPS hat, der ballert so das ganze log voll^^
Wenn Du kein GPS hast, dann musst Du in der Konfiguration den GPS Abfragetype auf "nicht abfragen" stellen und schon wird das auch nicht mehr im Log als Fehler auftauchen.
Danke!
Bei dem Job Modus wenn ich nen Job über den Adapter starte, muss ich dann noch nen Script machen, das er in die Ladestation fährt oder passiert das von alleine?
-
@braindead said in Neuer Robonect HX Adapter:
@Malz1902 said in Neuer Robonect HX Adapter:
Was macht der Mode Job denn?
Mit "Job" könnte man den Mäher einmalig zu einer bestimmten Zeit für eine bestimmte Zeit loslaufen lassen. Also genau das, was man im Robonect Webintrface auch machen kann. Der Modus ist aber nicht 100%ig im Adapter implementiert, so dass Du damit den Mäher nur sofort losschicken kannst und er wieder in die Station fährt, wenn der Akku zur Neige geht.
@Malz1902 said in Neuer Robonect HX Adapter:
Könnte man vielleicht überlegen für eine nächste Version das man im Adapter sagen kann das man GPS hat, der ballert so das ganze log voll^^
Wenn Du kein GPS hast, dann musst Du in der Konfiguration den GPS Abfragetype auf "nicht abfragen" stellen und schon wird das auch nicht mehr im Log als Fehler auftauchen.
Danke!
Bei dem Job Modus wenn ich nen Job über den Adapter starte, muss ich dann noch nen Script machen, das er in die Ladestation fährt oder passiert das von alleine?
@Malz1902 said in Neuer Robonect HX Adapter:
Bei dem Job Modus wenn ich nen Job über den Adapter starte, muss ich dann noch nen Script machen, das er in die Ladestation fährt oder passiert das von alleine?
Ich habe den Modus noch nie benutzt, aber ich glaube der Mäher fahrt von alleine in die Station. Probiers doch einfach mal aus. :-)
-
@Malz1902 said in Neuer Robonect HX Adapter:
Bei dem Job Modus wenn ich nen Job über den Adapter starte, muss ich dann noch nen Script machen, das er in die Ladestation fährt oder passiert das von alleine?
Ich habe den Modus noch nie benutzt, aber ich glaube der Mäher fahrt von alleine in die Station. Probiers doch einfach mal aus. :-)
@braindead
Mach ich gleich mal :-) -
und was ist der Unterschied zwischen:
robonect.0.batteries.0.charge
und
robonect.0.status.batteryder eine Werte zeigt 98% an der andere 99%
Und welcher Abfrageintervall ist gut? Was ist wenn ich den Abfrageintervall auf 10 Sekunden oder so stelle?
-
Bekomme neuerdings imme folgendes
robonect.0 2020-06-04 07:34:41.569 error (12835) Error: JSON not validrobonect.0 2020-06-04 08:35:48.315 error (17800) TypeError: Cannot read property 'status' of undefined at Robonect.<anonymous> (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) at process._tickCallback (internal/process/n robonect.0 2020-06-04 08:35:48.313 error (17800) uncaught exception: Cannot read property 'status' of undefined robonect.0 2020-06-04 08:35:48.308 error (17800) Error: Error: read ECONNRESETDanach wird der Adapter autom. neu gestartet
-
Bekomme neuerdings imme folgendes
robonect.0 2020-06-04 07:34:41.569 error (12835) Error: JSON not validrobonect.0 2020-06-04 08:35:48.315 error (17800) TypeError: Cannot read property 'status' of undefined at Robonect.<anonymous> (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) at process._tickCallback (internal/process/n robonect.0 2020-06-04 08:35:48.313 error (17800) uncaught exception: Cannot read property 'status' of undefined robonect.0 2020-06-04 08:35:48.308 error (17800) Error: Error: read ECONNRESETDanach wird der Adapter autom. neu gestartet
@Malz1902 said in Neuer Robonect HX Adapter:
robonect.0.motor.blade.average
liefert bei mir immer 0Hast Du eingestellt, dass auch der Motor abgefragt werden soll? Falls ja, dann tippe ich darauf, Robonect diese Informationen einfach nicht zurück gibt.
@Malz1902 said in Neuer Robonect HX Adapter:
und was ist der Unterschied zwischen:
robonect.0.batteries.0.charge
und
robonect.0.status.batteryder eine Werte zeigt 98% an der andere 99%
Der erste Wert kommt bei der Abfrage der Batterien, der zweite ich Teil der Statusabfrage. Wenn beide nicht gleichzeitig laufen, ist es nur logisch, dass die Werte unterschiedlich sind.
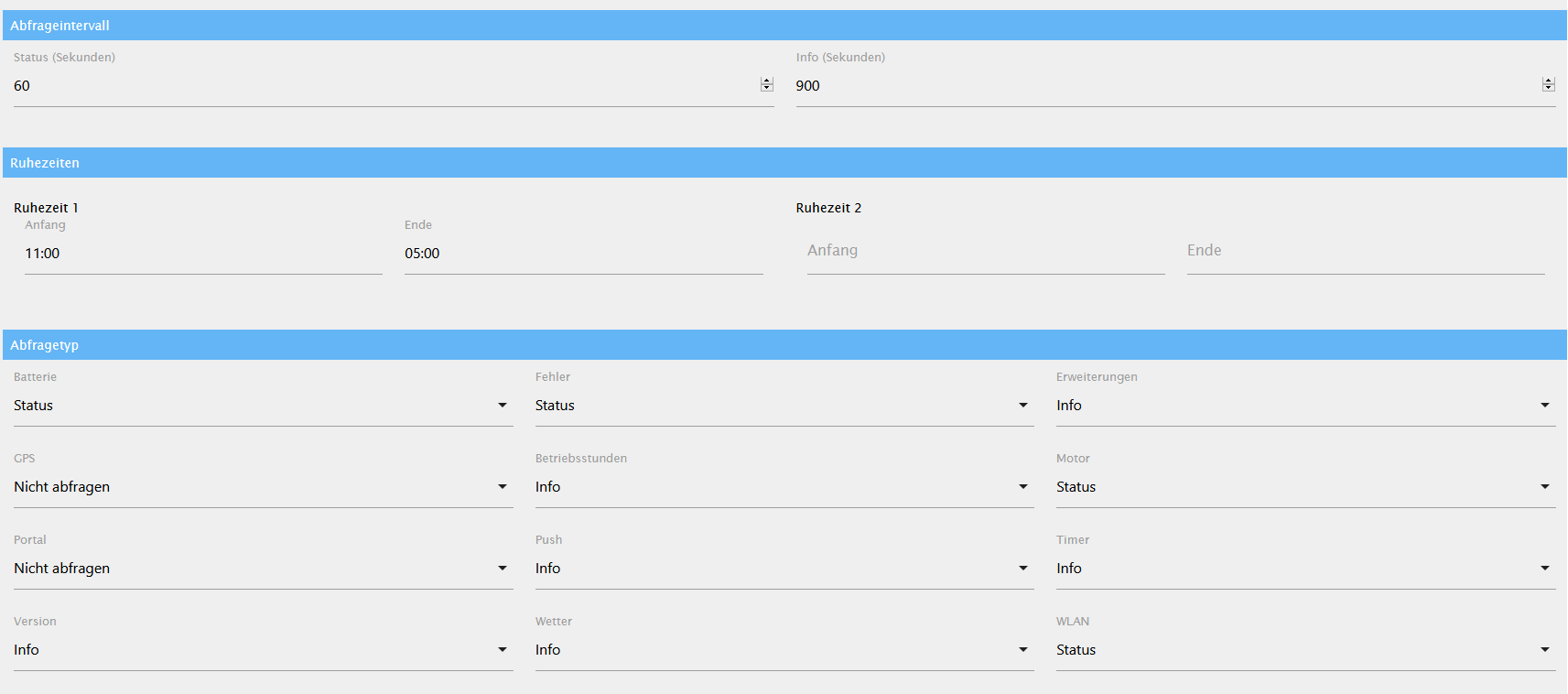
Und welcher Abfrageintervall ist gut? Was ist wenn ich den Abfrageintervall auf 10 Sekunden oder so stelle?
Mein Statusintervall steht auf 60 Sekunden. Das Infointervall auf 900 Sekunden. Was für Dich gut ist, musst Du selber entscheiden. 10 Sekunden halte ich für deutlichst übertrieben.
@Malz1902 said in Neuer Robonect HX Adapter:
Bekomme neuerdings imme folgendes
robonect.0 2020-06-04 07:34:41.569 error (12835) Error: JSON not validrobonect.0 2020-06-04 08:35:48.315 error (17800) TypeError: Cannot read property 'status' of undefined at Robonect.<anonymous> (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) at process._tickCallback (internal/process/n robonect.0 2020-06-04 08:35:48.313 error (17800) uncaught exception: Cannot read property 'status' of undefined robonect.0 2020-06-04 08:35:48.308 error (17800) Error: Error: read ECONNRESETDanach wird der Adapter autom. neu gestartet
Wenn das erst seit neuestem wirklich immer kommt und vorher funktioniert hat, dann stellt sich die Frage was Du verändert hast.
-
@Malz1902 said in Neuer Robonect HX Adapter:
robonect.0.motor.blade.average
liefert bei mir immer 0Hast Du eingestellt, dass auch der Motor abgefragt werden soll? Falls ja, dann tippe ich darauf, Robonect diese Informationen einfach nicht zurück gibt.
@Malz1902 said in Neuer Robonect HX Adapter:
und was ist der Unterschied zwischen:
robonect.0.batteries.0.charge
und
robonect.0.status.batteryder eine Werte zeigt 98% an der andere 99%
Der erste Wert kommt bei der Abfrage der Batterien, der zweite ich Teil der Statusabfrage. Wenn beide nicht gleichzeitig laufen, ist es nur logisch, dass die Werte unterschiedlich sind.
Und welcher Abfrageintervall ist gut? Was ist wenn ich den Abfrageintervall auf 10 Sekunden oder so stelle?
Mein Statusintervall steht auf 60 Sekunden. Das Infointervall auf 900 Sekunden. Was für Dich gut ist, musst Du selber entscheiden. 10 Sekunden halte ich für deutlichst übertrieben.
@Malz1902 said in Neuer Robonect HX Adapter:
Bekomme neuerdings imme folgendes
robonect.0 2020-06-04 07:34:41.569 error (12835) Error: JSON not validrobonect.0 2020-06-04 08:35:48.315 error (17800) TypeError: Cannot read property 'status' of undefined at Robonect.<anonymous> (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) at process._tickCallback (internal/process/n robonect.0 2020-06-04 08:35:48.313 error (17800) uncaught exception: Cannot read property 'status' of undefined robonect.0 2020-06-04 08:35:48.308 error (17800) Error: Error: read ECONNRESETDanach wird der Adapter autom. neu gestartet
Wenn das erst seit neuestem wirklich immer kommt und vorher funktioniert hat, dann stellt sich die Frage was Du verändert hast.
@braindead said in Neuer Robonect HX Adapter:
@Malz1902 said in Neuer Robonect HX Adapter:
Bekomme neuerdings imme folgendes
robonect.0 2020-06-04 07:34:41.569 error (12835) Error: JSON not valid@braindead said in Neuer Robonect HX Adapter:
Wenn das erst seit neuestem wirklich immer kommt und vorher funktioniert hat, dann stellt sich die Frage was Du verändert hast.
Habe im Adapter die Zeit von 11.00 - 5.00 Uhr eingestellt wo der Adapter im Ruhemodus sein soll. Habe die Zeit aber auch wieder rausgenommen, irgendwie spinnt seitdem der Adapter
-
Hab den Adapter mal gelöscht und neu installiert, die Errors kommen aber immer noch. Komisch
@Malz1902 ECONNRESET deutet auf ein Netzwerkproblem hin und nicht auf ein Problem des Adapters. Stimmen IP und Port? Hat der Mäher überall guten WLAN Empfang oder ist der schon grenzwertig? Hier würde ich an Deiner Stelle mal ansetzen.
-
@Malz1902 ECONNRESET deutet auf ein Netzwerkproblem hin und nicht auf ein Problem des Adapters. Stimmen IP und Port? Hat der Mäher überall guten WLAN Empfang oder ist der schon grenzwertig? Hier würde ich an Deiner Stelle mal ansetzen.
-
Servus! Bitte helft einem Dummen mal über die Strasse.
Habe erst kürzlich mit IO Broker angefangen und mir anschließend diesen Adapter installiert.
Jetzt wechselt er ständig von grün nach rot oder umgekehrt und dieser Fehler wird dabei eingetragen.robonect.0 2020-06-17 14:28:02.314 error (14570) TypeError: Cannot read property 'status' of undefined at Robonect.<anonymous> (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) at process._tickCallback (internal/process/n
robonect.0 2020-06-17 14:28:02.313 error (14570) unhandled promise rejection: Cannot read property 'status' of undefined
robonect.0 2020-06-17 14:28:02.312 error Unhandled promise rejection. This error originated either by throwing inside of an async function without a catch block, or by rejecting a promise which was not handled with .catch().
robonect.0 2020-06-17 14:28:02.308 error (14570) Error: Bad response: {"statusCode":401,"body":"","headers":{"content-type":"text/html","server":"FHDR","connection":"close","content-length":"0","cache-contrWas ich jetzt nicht verstehe oder nicht gefunden habe, ist die Angabe Benutzername Kennwort vom Webinterface oder vom Husqvarna Account?
Ich habe den 105er Baujahr 2019 mit Robonect Wlan Modul, Firmware 1.1b, ZeroConf 1.5
Habe auch mein Kennwort vom Husqvarna Account geändert damit keine Sonderzeichen mehr drin sind, da ich meine gelesen zu haben, dass das Probleme macht.
Das Kennwort vom Webinterface hat noch Sonderzeichen.
Webinterfaceverbindung klappt einwandfrei
IP Kreis IO Broker 192.168.140.xx
IP Kreis Mäher 192.168.100.xxEin Netzwerkproblem schließe ich weitgehenst aus! Hier werden mir einige Daten im Broker geliefert:
last_sync state Last synchronization 2020-06-17 12:58:44
onlinestate Mower is online true
Benötigt ihr noch mehr Informationen?
Über Starthilfe wäre ich sehr dankbar!
-
Servus! Bitte helft einem Dummen mal über die Strasse.
Habe erst kürzlich mit IO Broker angefangen und mir anschließend diesen Adapter installiert.
Jetzt wechselt er ständig von grün nach rot oder umgekehrt und dieser Fehler wird dabei eingetragen.robonect.0 2020-06-17 14:28:02.314 error (14570) TypeError: Cannot read property 'status' of undefined at Robonect.<anonymous> (/opt/iobroker/node_modules/iobroker.robonect/main.js:295:42) at process._tickCallback (internal/process/n
robonect.0 2020-06-17 14:28:02.313 error (14570) unhandled promise rejection: Cannot read property 'status' of undefined
robonect.0 2020-06-17 14:28:02.312 error Unhandled promise rejection. This error originated either by throwing inside of an async function without a catch block, or by rejecting a promise which was not handled with .catch().
robonect.0 2020-06-17 14:28:02.308 error (14570) Error: Bad response: {"statusCode":401,"body":"","headers":{"content-type":"text/html","server":"FHDR","connection":"close","content-length":"0","cache-contrWas ich jetzt nicht verstehe oder nicht gefunden habe, ist die Angabe Benutzername Kennwort vom Webinterface oder vom Husqvarna Account?
Ich habe den 105er Baujahr 2019 mit Robonect Wlan Modul, Firmware 1.1b, ZeroConf 1.5
Habe auch mein Kennwort vom Husqvarna Account geändert damit keine Sonderzeichen mehr drin sind, da ich meine gelesen zu haben, dass das Probleme macht.
Das Kennwort vom Webinterface hat noch Sonderzeichen.
Webinterfaceverbindung klappt einwandfrei
IP Kreis IO Broker 192.168.140.xx
IP Kreis Mäher 192.168.100.xxEin Netzwerkproblem schließe ich weitgehenst aus! Hier werden mir einige Daten im Broker geliefert:
last_sync state Last synchronization 2020-06-17 12:58:44
onlinestate Mower is online true
Benötigt ihr noch mehr Informationen?
Über Starthilfe wäre ich sehr dankbar!
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden208
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge