IRobot Roomba Adapter
-
@JB_Sullivan sagte in IRobot Roomba Adapter:
Würde ich gerne machen - aber irgendwie kann man auf GIT nix schreiben - nur Lesemodus
Siehe dortige Repo-Beschreibung:
DEVELOPMENT HAS BEEN MOVED TO COMMUNITY.https://github.com/iobroker-community-adapters/ioBroker.roomba
-
Das ändert leider nichts - auch wenn du auf die Seite gehst und dort einen Pull Request aufmachen willst, öffnet sich die gleiche Meldung wieder.
Man kann zwar eine Pull Request Maske öffnen, aber wenn man diese abschicken will, wird nichts gespeichert (read only)
-
@JB_Sullivan sagte in IRobot Roomba Adapter:
Man kann zwar eine Pull Request Maske öffnen, aber wenn man diese abschicken will, wird nichts gespeichert (read only)
Bist du sicher, dass du einen Pull Request machen willst? Du hast gar keinen Fork erstellt? Du musst von https://github.com/iobroker-community-adapters/ioBroker.roomba und dann kannst du auch deine Änderung pullen.
Ich glaube aber, du willst ein Issue aufmachen (als Feature Request), oder?
Also über https://github.com/iobroker-community-adapters/ioBroker.roomba/issues. -
@JB_Sullivan said in IRobot Roomba Adapter:
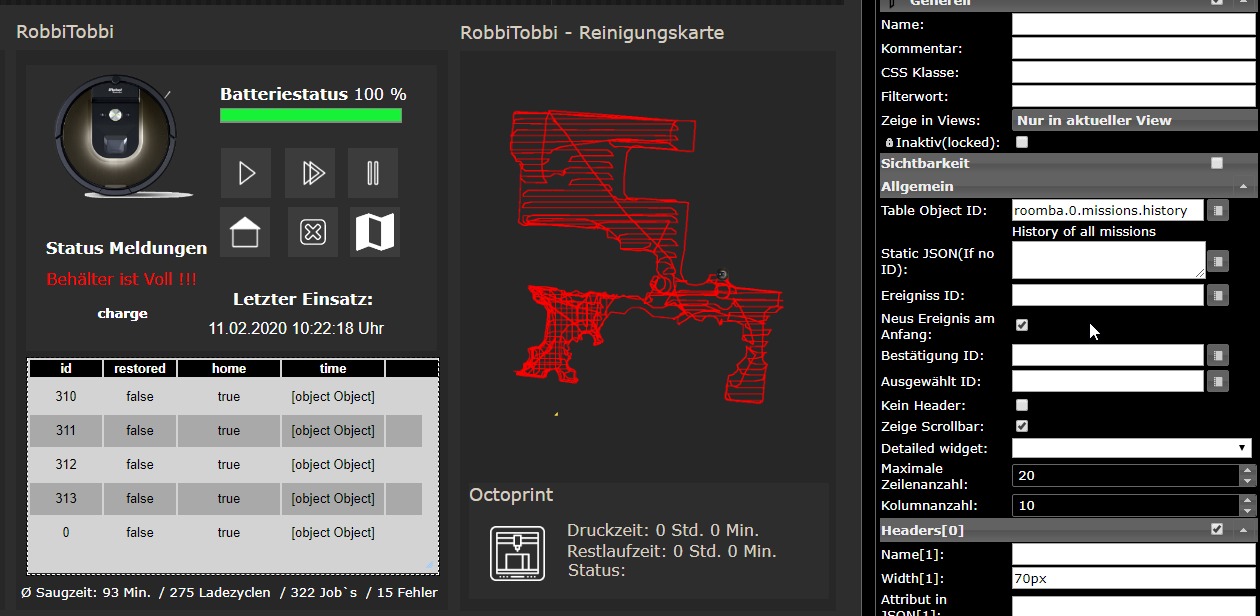
Nochmal zu der Tabelle - auch da komme ich irgendwie nicht weiter. Wenn man im VIS einstellt "Neues Ereignis am Anfang", sortiert er das nicht entsprechend durch.
Auch wenn der Inhalt der Tabelle sowieso irgendwie nicht viel her gibt, müsste der doch die ID Nummern zumindest dieser Regel entsprechend anpassen. Das macht er aber auch nicht. Gibst du die Form der Tabelle in deinem Adapter vor, oder kommt die so aus dem Robbi?
Irgendwie sehe ich es nicht wo gibt es dieses VIS für den Roomba?
Danke
-
Kannst du bitte bei Gelegenheit mal fixen, dass man die iRobot Roomba-Kachel von der Übersichtsseite nicht entfernen kann?
-
@oFbEQnpoLKKl6mbY5e13 sagte in IRobot Roomba Adapter:
Kannst du bitte bei Gelegenheit mal fixen, dass man die iRobot Roomba-Kachel von der Übersichtsseite nicht entfernen kann?
Bei mir geht sie zu entfernen. Was genau geht denn nicht? Kannst du sie gar nicht anhaken oder übernimmt ioBroker den nicht-gesetzten Haken bei der Speicherung nicht?
-
iobroker übernimmt das Abhaken nicht.
-
@oFbEQnpoLKKl6mbY5e13 Welchen Browser nutzt du und hast du das Problem auch in anderen Browsern? Gibt es einen Fehler im ioBroker log? Gibt es einen Fehler im Browser Log (unter
Web Developer->Web Console)? -
Ich nutze Firefox. Mit Edge ist es dasselbe. Kein Fehler im iobroker-Log. Kein Fehler in der Web-Konsole.
Es funktioniert ansonsten mit jeder anderen Kachel. Wo wird das denn gespeichert?
-
@oFbEQnpoLKKl6mbY5e13 der Admin Adapter speichert das in der Systemconfig.
-
Gibt es eine Möglichkeit, dass ich das in der Systemconfig manuell ändere?
-
Ich habe immer wieder versucht etwas mit json Tabelle zu machen. Wie ich jetzt erfahren habe, ist die Ausgabe der json Tabelle, bzw. der darin enthaltenen Datenanordnung offensichtlich nicht json "Normgerecht".
Siehe hier -> https://forum.iobroker.net/topic/15965/wie-wird-das-widget-json-table-eingestellt-formatiert/37
Der Weg, die Daten Darstellungfähig zu erhalten wäre, wenn ich das richtig verstanden habe, wohl nur über zusätzliche Datenpunkte möglich, was aber auch sehr auffwändig ist. Besteht irgend eine Möglichkeit dieses schon auf Adapter Ebene umzuwandeln?
-
Moin,
ich habe momentan und seit ca. dem 4.3 leider das Problem, dass die Missionsdaten im Ordner current nicht aktualisiert werden.
Alle anderen Daten sind korrekt, werden aktualisiert und auch der refreshedDateTime wert wird aktualisiert und ist korrekt.
Auch im current Ordner werden ausschließlich die Datenpunkte error und phase ordnungsgemäss aktualisiert.Ich habe in dem Zeitraum einen neuen Router Inbetriebgenommen, habe die IP, den Benutzer und das Passwort in den Adaptereinstellungen erneuert, habe ich hier etwas vergessen oder übersehen?
Habe den aktualisierungsintervall momentan auf 10 sek. Stehen.Ansonsten funktioniert auch alles einwandfrei und Befehle werden korrekt ausgeführt,
Im debug log wird lediglich eine Warnung angegeben: (canvas not installed!) warum das nicht installiert ist, weiß ich nicht, sollte allerdings nur für die Map wichtig sein oder? Diese benötige ich nicht in IOB!Edit: Nach kompletter Neuinstallation werden mir im Ordner missions/current: nur noch die beiden Datenpunkte error und phase angezeigt, alle anderen Datenpunkte sind momentan nicht vorhanden.
Wo könnte hier der Fehler liegen?
Adapter Version 1.1.1Danke schonmal für Hilfe,
Schöne Grüße und bleibt gesund! -
Hallo zusammen,
ich habe ein Prblem bei der Installation von Canvas. Bei Schritt 4 der Anleitung (https://www.npmjs.com/package/iobroker.roomba) bekomme ich folgende Fehlermeldung:
gyp info spawn args ]
gyp: binding.gyp not found (cwd: C:\Windows\System32) while trying to load binding.gyp
gyp ERR! configure error
gyp ERR! stack Error:gypfailed with exit code: 1
gyp ERR! stack at ChildProcess.onCpExit (C:\Users\Toby\AppData\Roaming\npm\node_modules\node-gyp\lib\configure.js:351:16)
gyp ERR! stack at ChildProcess.emit (events.js:311:20)
gyp ERR! stack at Process.ChildProcess._handle.onexit (internal/child_process.js:275:12)
gyp ERR! System Windows_NT 10.0.18363
gyp ERR! command "C:\Program Files\nodejs\node.exe" "C:\Users\Toby\AppData\Roaming\npm\node_modules\node-gyp\bin\node-gyp.js" "rebuild" "--GTK_Root=C:\opt\GTK"
gyp ERR! cwd C:\Windows\System32
gyp ERR! node -v v12.16.1
gyp ERR! node-gyp -v v6.1.0
gyp ERR! not okHat jemand eine Idee was hier schief läuft?
Beste Grüße aus dem hohen Norden")
Toby
-
@Toby275 in welchem Ordner hast du den Befehl denn ausgeführt ? Er findet
binding.gypnicht. Wo liegt die Datei? Ggf. den Pfad in derPATHSystemvariablen ergänzen. -
@Zefau vielen Dank für die schnelle Antwort.
Aus dem Verzeichnis C:\GTK heraus. Ist das falsch? Wo liegt denn die binding.gyp bzw. aus welchem Verzeichnis heraus muss ich den Befehl starten? -
@Toby275 ich nutze ioBroker nicht auf Windows und hab daher keine Ahnung. Einfach mal googeln.
Glaube unter Windows musste die Datei anlegen.
https://github.com/nodejs/node-gyp#how-to-use
https://github.com/Automattic/node-canvas/blob/master/binding.gyp
-
Danke für die Antwort. Hab alles auf Linux neu aufgesetzt, jetzt habe ich keine Probleme mehr
-
Moin ich nochmal

Mein Problem von oben, mit den fehlenden missions Datenpunkten konnte ich leider noch nicht beheben und hoffe weiterhin auf Hilfe

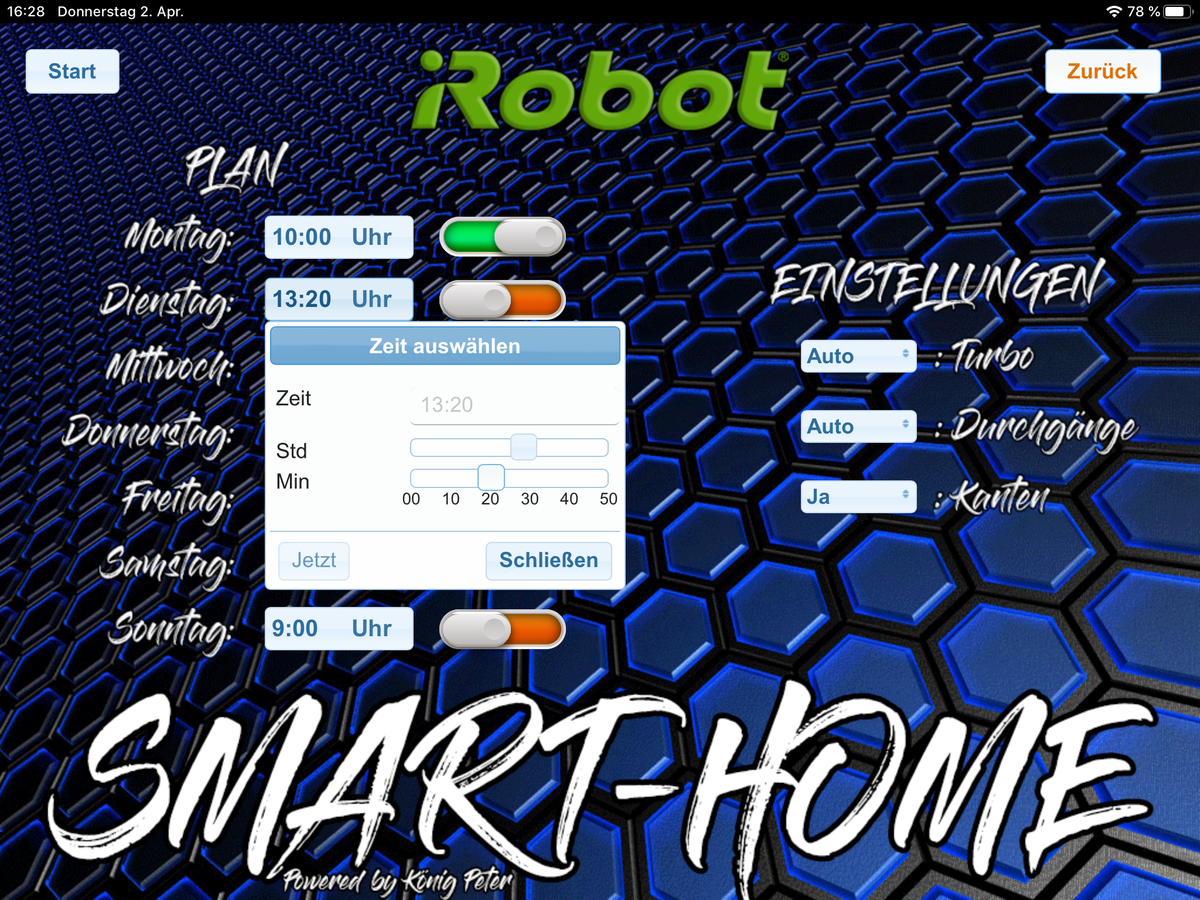
Da ich momentan etwas Zeit habe, bastel ich mir nun doch eine VIS.
Jetzt bin ich gerade dabei den Roomba einzubinden und mir ist aufgefallen, dass die Werte für Einstellungen wie zB. Der Saugleistung oder kantenreinigung (roomba.0/commands/device/preferences/...),
sowie die Daten für geplante Reinigungsdurchgänge nicht geändert werden können.Währe es möglich das zu ändern?
Wäre natürlich super wenn ich hier alles über eine Oberfläche nutzen könnte, gerade die Programmierung der geplanten Aufgaben nutze ich gerne, diese lassen sich momentan nur anzeigen wenn ich das richtig gesehen habe.Danke und schöne Grüße
EDIT: Sorry war etwas voreilig, Werte für die geplanten Aufgaben können geändert werden, nur die anderen Einstellungen nicht!

-
Wirklich keiner eine Idee, warum bei mir die Missionsdaten verschwunden sind?
Ich weiß nicht mehr weiter, kann auch im netz nichts finden, was mir weiterhilft!
Kleines Update, ich weiß nicht warum ich das nicht früher schon getestet habe, aber wenn ich eine zweite Instanz erstelle sind alle Daten da, wenn ich die erste allerdings lösche und eine neue erstelle fehlen die Daten wieder.
Sind hier noch weitere Daten zu dieser Instanz irgendwo anders gespeichert, die Aussagen welche Objekte erstellt werden? Anders kann ich mir das nicht erklären!
So geht es zwar erstmal, ich deaktiviere einfach die erste Instanz und lasse die zweite laufen, ob die Objekte auch geladen oder aktualisiert werden weiß ich allerdings nicht, momentan sind sie leer, Ich habe aber auch noch keine Reinigung gestartet.
Als dieses Problem anfing, waren die Objekte auch erst vorhanden, wurden allerdings nicht aktualisiert, erst bei einer Neuinstallation wurden die Objekte dann nicht mehr erstellt.Außerdem ist mir aufgefallen, dass der Wert von dem Objekt „docked (State whether robot is docked)“ im Ordner states, zwar nach dem docken auf true wechselt, nach kurzer Zeit jedoch wieder auf false springt, habe nur ich dieses Problem oder liegt der falsche Wert am Roboter?
Und wegen den Einstellungen, hier stehen die Objekte:
/device/preferences/openOnly
/device/preferences/noAutoPassesa
/device/preferences/twoPass
/device/preferences/carpetBoostAuto
/device/preferences/carpetBoostHighAuf „Write:false“, würde es hier reichen diese auf „true“ zu ändern, oder würde der geänderte wert nicht an den Roboter übermittelt werden?
Danke für Hilfe und schöne Grüße

