Neuer Adapter für Roborock-Staubsauger
-
@jahnbes sagte in Neuer Adapter für Roborock-Staubsauger:
ich habe bisher in der langen Liste immer geschaut, ob sich ein Datenpunkt ändert und wenn ja, wie.
Das war mein Ansinnen. Weil man die Objekte ja nicht mit einmal auf den Bildschirm bekommt ist es unmöglich das vernünftig nach zu vollziehen.
-
@spacerx said in Neuer Adapter für Roborock-Staubsauger:
Geht der Installationskram auch anders.
Nein. mitmproxy braucht zwingend Python.
Hast du das Zertifikat von mitmproxy denn auf dem iPhone als root Zertifikat hinzugefügt? -
@copystring ja habe ich.

-
@spacerx mit iPhone kenne ich mich nur wenig aus. Sicher, dass es als root Zertifikat hinzugefügt ist? Alle anderen Zertifikatstypen wären falsch.
-
@copystring das war das Stichwort. Es reichte nicht das Profil zu Installieren. Da muss man beim iPhone doch tiefer in die Abgründe der Einstellungen.

Jedenfalls zappelt jetzt was. -
Ab und an tauchen folgende Meldungen auf.
C:\Users\SpacerX\.local\pipx\venvs\mitmproxy\Scripts\python.exe [21:15:18.262] Packet type CONNACK is not supported yet! C:\Users\SpacerX\.local\pipx\venvs\mitmproxy\Scripts\python.exe [21:15:18.262] Addon error: unpack requires a buffer of 2 bytes Traceback (most recent call last): File "C:\ioBroker\node_modules\iobroker.roborock\lib\sniffing\mitmproxy_roborock.py", line 286, in tcp_message mqtt_packet = MQTTControlPacket(message.content) File "C:\ioBroker\node_modules\iobroker.roborock\lib\sniffing\mitmproxy_roborock.py", line 83, in __init__ self._parse_publish_variable_headers() File "C:\ioBroker\node_modules\iobroker.roborock\lib\sniffing\mitmproxy_roborock.py", line 136, in _parse_publish_variable_headers field_length, field_content_bytes = self._parse_length_prefixed_bytes(offset) File "C:\ioBroker\node_modules\iobroker.roborock\lib\sniffing\mitmproxy_roborock.py", line 127, in _parse_length_prefixed_bytes field_length = struct.unpack("!H", field_length_bytes)[0] struct.error: unpack requires a buffer of 2 bytes C:\Users\SpacerX\.local\pipx\venvs\mitmproxy\Scripts\python.exe [21:15:18.309] [PUBLISH] C:\Users\SpacerX\.local\pipx\venvs\mitmproxy\Scripts\python.exe [21:15:18.309] [PUBLISH]Die Sniffing Message taucht bei mir leider auch nicht im Log auf.
Jetzt weis ich noch nicht genau nach was ich schauen soll.
-
@spacerx okay. Kann ich mir aktuell nicht angucken. Bin im Urlaub. Du müsstest dich gedulden oder selber mal schauen was das sein kann.
-
@copystring Alles gut!
Nachdem ich 24h Lebenszeit in das Unternehmen Sniffing verschwendet habe, habe ich der PC-Kiste erst mal den Strom abgedreht. Zur Frustbewältigung ein Eis gegessen und 3 Kippen verschlungen.
Nu hat es mir dann doch keine Ruhe gelassen. Also PC wieder an. ioBroker-Dienst + mitmproxy gestartet, Wireguard auf iPone angeschalten und Roborock App gestartet.Jetzt passt auf was kommt!
Es Läuft. Decoded sniffing in der Log-Ausgabe.
Hier schon mal rausgepickt was ich herausfinden will.
2023-08-05 22:12:19.101 - roborock.0 (8400) Decoded sniffing message: {"dps":{"101":"{"id":277019,"method":"get_wash_towel_mode","params":{}}"},"t":1691266339} 2023-08-05 22:12:19.181 - roborock.0 (8400) dps debug: {"id":277019,"result":{"wash_mode":1}} 2023-08-05 22:12:19.204 - roborock.0 (8400) Decoded sniffing message: {"dps":{"101":"{"id":277020,"method":"get_smart_wash_params","params":{}}"},"t":1691266339} 2023-08-05 22:12:19.296 - roborock.0 (8400) dps debug: {"id":277020,"result":{"smart_wash":0,"wash_interval":1200}}Das sind Teile von den Einstellungen der Dockingstation.
Ich bin erst mal Happy.
Falls jemand für das Sniffing mit Roborock App auf iPhone Unterstützung braucht kann ich gern mit meinen Notizen von diesem Amoklauf behilflich sein.
Gut Nächtle.
-
@jahnbes Bevor ich es vergessen!
In der Doku zu den Objekten vom Robi Hast du eingetragen:
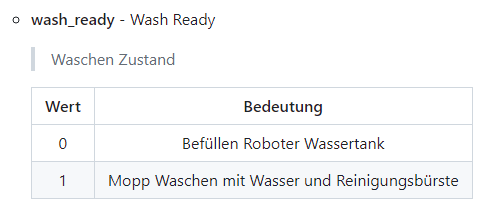
wash_ready wird nach meiner Beobachtung und den Logs von oben immer dann auf TRUE wenn der Robi zum Mopp Waschen richtig herum an der Station angedockt hat. Unter dem Wasserbefüllstutzen am Roboter ist ein Mikroschalter der durch eine kleine Nase unter dem Wasserstutzen der Station betätigt wird.
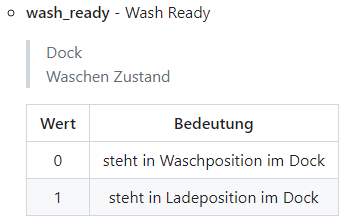
wash_ready wird FALSE wenn der Robi nach dem Mopp Waschen wieder abdockt und der Robi dreht rum um in Ladeposition wieder anzudocken. -
@jahnbes sagte in Neuer Adapter für Roborock-Staubsauger:
@matt77che
Danke, so habe ich es jetzt auch im Wiki eingetragen.Wenn ihr schon mal dabei seid, das Wiki zu vervollständigen
 wir haben einen Q7 Max+
wir haben einen Q7 Max+Mehrfache Tests haben ergeben:
clean_type:
1 = Gesamt Reinigung (alle Räume)
2 = Zonenreinigung (ausgewählt über die App z.b.)
3 = Raumreinigungstart_type:
1 = manuell (Knopfdruck am Roboter)
2 = via App (aus der App gestartet oder per ioBroker.Adapter)
3 = Planstart (durch Zeitplanung in der App)complete Type
1 = normal beendet
<> 1 = abgebrochen
Andere Werte habe ich auch noch, die schicke ich nachher noch nach
")
Gruß Micha
-
@spacerx Danke, ist geändert!
-
@tritanium
Danke, MIcha, ich habe das Wiki ergänzt. Und warte auf Weiteres!
Ein schönes Wochenende noch, Gruß Bert. -
@jahnbes Sorry das ich nerve.
Es ist genau umgekehrt!
0 = Nicht bereit zum Mopp Waschen
1 = Bereit zum Mopp Waschen und ggf. Wasser nachtankenSagt aus das der Saugroboter richtig herum in der Station steht und bereit ist um den Mopp zu Waschen oder Wasser nachzutanken.
Wenn der Robi beim Andocken zum Waschen den Befüllstutzen nicht treffen würde bleibt wash_ready auf 0 (FALSE) -
@spacerx
Oh je, ich habe 0 und 1 und die Zuordnung von true und false dazu verwechselt. Mea culpa.
Gruß Bert. -
So, diesmal habe ich mich mit dem Aufbau der JSON befasst.
Datenpunkt ...CleaningInfo.JSON:

begin + end:-------> Im TS Format
duration:-----------> in Sekunden
area:----------------> Gereingte Fläche (durch 1000000, für m²)
error:---------------> 0 = ohne Fehler beendet
duration:-----------> in Sekunden
complete:----------> 0 = abgebrochene Reinigung, 1 = Reingung beendet
start_type:---------> siehe Wiki
clean_type:--------> siehe Wiki
dust_collection_Status: -----> 0 = Staub eingesammelt (nur), 1 = gesaugt + gewischt
map_flag:-----------> Karten ID (bei mir immer 0, da nur eine Karte verwendet wird)
Den DP "finish_reason" gibt es übrigens mit folgenden Ergebnissen:
21
24
52
54
56Die bin ich aber noch am "testen"
Habe die JSON bei mir in der VIS drin und dementspreechend formatiert:
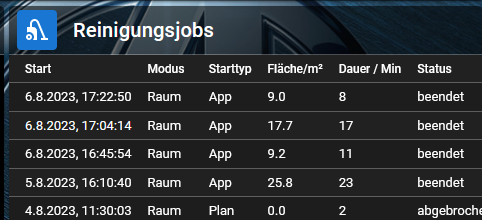
Melde mich wieder wenn ich mehr habe, bis dahin lg MIcha
-
@tritanium
Danke! -
Im Wiki ist die Unterteilung in "Roboter" und "Dock" aufgelöst. Sie war nicht mehr durchzuhalten. Jetzt ist alles wie im ioBroker angeordnet, also alphabetisch anhand des Objektnamens
Wenn ein Objekt nur für eine Station relevant ist, wird das gleich nach seinem Namen durch das Wort "Dock" angezeigt. -
Hallo zusammen,
ich habe gerade den Adapter installiert, die Instanz lässt sich auch öffnen.
Allerdings bekomme ich keine Verbindung, es kommen immer wieder Fehlermeldungen und es erfolgt alle paar Sekunden ein Neutstart.Anbei die Meldungen im Log:

Kann mir vielleicht jemand helfen?
-
Bitte nicht als Screenshot.
Und nodejs15 ist vollkommen falsch.
Ungerade Versionen sind für die Entwicklung vorgesehen, produktiv setzt man gerade Versionen von nodejs ein. Installier da die aktuelle Empfehlung v18. -
Hallo,
ist es auch möglich die Reinigung mehrerer Räume auf einmal anzustoßen?
