Neato Botvac Connected Adapter
-
Wollte nur anmerken, dass der Botvac D5 doch deutlich weniger Optionen hat, als der VR200. Spotbreite und Länge kann man z.B. nicht einstellen.
Frage: gibt es hier jemanden, der im Adapter eine Möglichkeit sieht, die "Extra Care" Funktion des Botvac abzugreifen?
Diese Funktion führt dazu, dass der Robo mehr Abstand zu Möbeln und Co. hält - bei mir ist das z.B. wichtig, weil er ohne diese Funktion immer wirklich auf den cm exakt zwischen die Stuhlbeine fährt und dann nicht mehr rauskommt.
Ich selber bin dafür leider nicht bewandert genug `
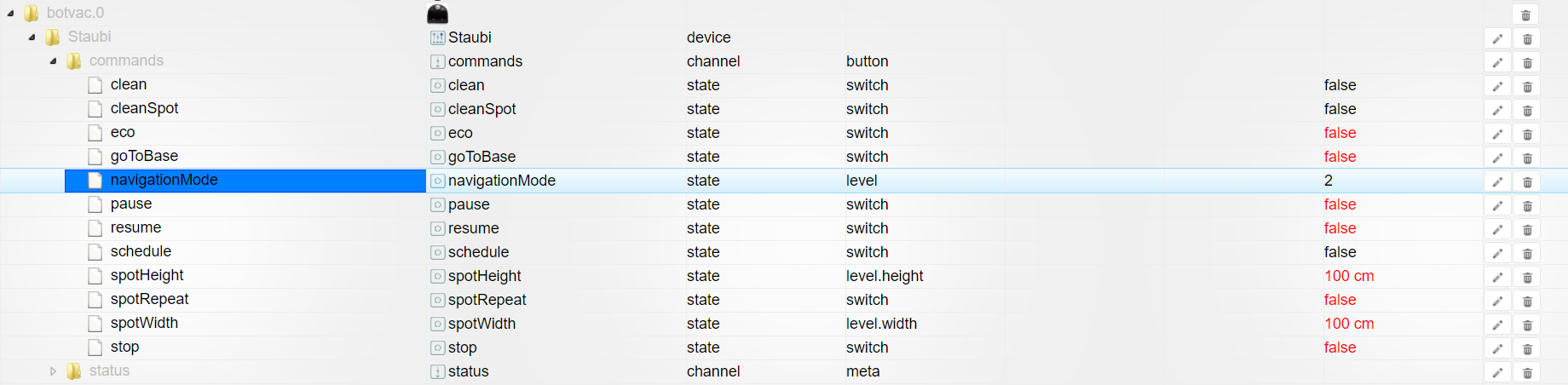
Moin, habe es geschafft das navigationMode mit zu integrieren.
(mit meinem kleinen botvac D3)
1= normal
2= extra care
@Pmant
Kannst du das bitte im Adapter mit integrieren? oder kann ich das über "github.com/Pmant/ioBroker.botvac" selbst ändern?
main.js
! ```
`/**- botvac adapter
*/
! /* jshint -W097 */// jshint strict:false
/*jslint node: true /
"use strict";
! var utils = require(__dirname + '/lib/utils'); // Get common adapter utils
var botvac = require('node-botvac');
var client = new botvac.Client();
var allRobotNames = [];
var allRobots = {};
var init = false;
var polltimer;
var pollInterval;
var restartTimer;
! // adapter will be restarted automatically every time as the configuration changed, e.g system.adapter.botvac.0
var adapter = utils.adapter('botvac');
! // is called when adapter shuts down - callback has to be called under any circumstances!
adapter.on('unload', function (callback) {
callback();
});
! // is called if a subscribed state changes
adapter.on('stateChange', function (id, state) {
// you can use the ack flag to detect if it is status (true) or command (false)
if (init && state && !state.ack) {
var arr = id.split('.');
if (arr.length !== 5) {
return;
}
var robotName = arr[2];
var channel = arr[3];
var command = arr[4];
if (allRobotNames.indexOf(robotName) === -1) {
adapter.log.warn('state change in unknown device: ' + robotName);
return;
} else if (channel !== 'commands') {
adapter.log.warn('state change in unknown channel: ' + channel);
return;
}
! switch (command) {
case 'schedule':
if (state.val) {
allRobots[robotName].enableSchedule(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot enable schedule ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
adapter.setState(robotName + '.status.isScheduleEnabled', true, true);
});
} else {
allRobots[robotName].disableSchedule(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot disable schedule ' + robotName);
adapter.setState(id, true, true);
return;
}
adapter.setState(id, false, true);
adapter.setState(robotName + '.status.isScheduleEnabled', false, true);
});
}
break;
case 'clean':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use stop state if you want to stop cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canStart !== true) {
adapter.log.warn('cannot start cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//start cleaning
allRobots[robotName].startCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot start cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'cleanSpot':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use stop state if you want to stop cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canStart !== true) {
adapter.log.warn('cannot start cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//start cleaning
allRobots[robotName].startSpotCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot start cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'pause':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use resume or stop state if you want to resume or stop cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canPause !== true) {
adapter.log.warn('cannot pause cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//pause cleaning
allRobots[robotName].pauseCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot pause cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'resume':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use pause or stop state if you want to pause or stop cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canResume !== true) {
adapter.log.warn('cannot resume cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//resume cleaning
allRobots[robotName].resumeCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot resume cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'stop':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use start or resume state if you want to start or resume cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canStop !== true) {
adapter.log.warn('cannot stop cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//stop cleaning
allRobots[robotName].stopCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot stop cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'goToBase':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use start state if you want to start cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canGoToBase !== true) {
adapter.log.warn('cannot go to base ' + robotName);
adapter.setState(id, false, true);
return;
}
//go to base
allRobots[robotName].sendToBase(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot go to base (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'eco':
allRobots[robotName].eco = state.val;
adapter.setState(id, state.val, true);
break;
case 'navigationMode':
allRobots[robotName].navigationMode = state.val;
adapter.setState(id, state.val, true);
break;
case 'spotWidth':
allRobots[robotName].spotWidth = state.val;
adapter.setState(id, state.val, true);
break;
case 'spotHeight':
allRobots[robotName].spotHeight = state.val;
adapter.setState(id, state.val, true);
break;
case 'spotRepeat':
allRobots[robotName].spotRepeat = state.val;
adapter.setState(id, state.val, true);
break;
default:
adapter.log.warn('unknown command: ' + command);
return;
}
}
});
! // is called when databases are connected and adapter received configuration.
// start here!
adapter.on('ready', function () {
main();
});
! function restart(ms) {
clearTimeout(restartTimer);
clearInterval(polltimer);
init = false;
restartTimer = setTimeout(main, ms);
}
! function main() {
clearInterval(polltimer);
allRobotNames = [];
allRobots = {};
var mail = adapter.config.mail;
var password = adapter.config.password;
! client.authorize(mail, password, false, function (error) {
if (error) {
adapter.log.warn('login failed');
restart(300000);
return;
}
client.getRobots(function (error, robots) {
if (error || !robots.length) {
adapter.log.warn('no robots found');
restart(300000);
return;
}
var devices = {};
for (var i = 0; i < robots.length; i++) {
if (robots[i].name) {
devices[robots[i].name] = {
'status': {
common: 'meta',
states: {
'reachable': {
common: {
type: 'boolean',
read: true,
write: false,
def: false,
role: 'indicator.reachable'
}
},
'lastResult': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
},
'error': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
},
'state': {
common: {
type: 'number',
read: true,
write: false,
role: 'value'
}
},
'action': {
common: {
type: 'number',
read: true,
write: false,
role: 'value'
}
},
'lastCleaning': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
},
'isCharging': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'isScheduleEnabled': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'isDocked': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'dockHasBeenSeen': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'charge': {
common: {
type: 'number',
read: true,
write: false,
role: 'value.battery'
}
},
'canStart': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'canStop': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'canPause': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'canResume': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'canGoToBase': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'modelName': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
},
'firmware': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
}
}
},
'commands': {
common: 'button',
states: {
'schedule': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'clean': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'eco': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'navigationMode': {
common: {
type: 'number',
read: true,
write: true,
def: 1,
role: 'level'
}
},
'cleanSpot': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'spotWidth': {
common: {
type: 'number',
read: true,
write: true,
def: 100,
min: 100,
unit: 'cm',
role: 'level.width'
}
},
'spotHeight': {
common: {
type: 'number',
read: true,
write: true,
def: 100,
min: 100,
unit: 'cm',
role: 'level.height'
}
},
'spotRepeat': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'pause': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'resume': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'stop': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'goToBase': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
}
}
}
};
allRobots[robots[i].name] = robots[i];
}
}
createDevices(devices, function () {
adapter.log.info('devices found: ' + robots.length);
adapter.getDevices(function (err, devices) {
if (Array.isArray(devices)) {
for (var i = 0; i < devices.length; i++) {
allRobotNames.push(devices[i].common.name);
}
}
//subscribe all states in namespace
init = true;
adapter.subscribeStates('');
pollInterval = adapter.config.pollInterval || 120;
pollInterval = 1000;
if (pollInterval < 60000) pollInterval = 60000;
polltimer = setInterval(update, pollInterval);
update();
});
});
});
});
}
! function update() {
for (var i = 0; i < allRobotNames.length; i++) {
updateRobot(allRobots[allRobotNames[i]]);
}
! /
client.getRobots(function (error, robots) {
adapter.log.warn('getRobots!');
if (error || !robots.length) {
adapter.log.warn('update error or no robot found ' + error);
restart(300000);
return;
}
for (var i = 0; i < allRobotNames.length; i++) {
var k = null;
//check if robot retrieved
for (var j = 0; j < robots.length; j++) {
if (robots[j].name === allRobotNames[i]) {
k = j;
}
if (allRobotNames.indexOf(robots[j].name) === -1) {
adapter.log.warn('new robot found');
restart(5000);
return;
}
}
//robot not retrieved
if (k === null) {
adapter.setState(allRobotNames[i] + '.status.reachable', false, true);
continue;
}
//update robot
adapter.setState(allRobotNames[i] + '.status.reachable', true, true);
updateRobot(robots[k]);
}
});
*/
}
! function updateRobot(robot, callback) {
if (!init) {
return;
}
robot.getState(function (error, state) {
if (error || !state) {
adapter.log.warn('could not update robot ' + robot.name);
adapter.setState(robot.name + '.status.reachable', true, false);
restart(pollInterval);
if (typeof callback === 'function') {
callback('could not update robot' + robot.name);
}
return;
}
adapter.setState(robot.name + '.status.reachable', true, true);
adapter.setState(robot.name + '.status.lastResult', state.result, true);
adapter.setState(robot.name + '.status.error', state.error, true);
adapter.setState(robot.name + '.status.state', state.state, true);
adapter.setState(robot.name + '.status.action', state.action, true);
var lastCleaning = state.cleaning.category === 1 ? 'manual' : state.cleaning.category === 2 ? 'auto' : 'spot';
lastCleaning += state.cleaning.mode === 1 ? ' eco' : ' turbo';
lastCleaning += state.cleaning.modifier === 2 ? ' x2' : '';
adapter.setState(robot.name + '.status.lastCleaning', lastCleaning, true);
adapter.setState(robot.name + '.status.isCharging', state.details.isCharging, true);
adapter.setState(robot.name + '.status.isDocked', state.details.isDocked, true);
adapter.setState(robot.name + '.status.isScheduleEnabled', state.details.isScheduleEnabled, true);
adapter.setState(robot.name + '.commands.schedule', state.details.isScheduleEnabled, true);
adapter.setState(robot.name + '.status.dockHasBeenSeen', state.details.dockHasBeenSeen, true);
adapter.setState(robot.name + '.status.charge', state.details.charge, true);
adapter.setState(robot.name + '.status.canStart', state.availableCommands.start, true);
if (state.availableCommands.start) {
adapter.setState(robot.name + '.commands.clean', false, true);
adapter.setState(robot.name + '.commands.cleanSpot', false, true);
}
adapter.setState(robot.name + '.status.canStop', state.availableCommands.stop, true);
if (state.availableCommands.stop) {
adapter.setState(robot.name + '.commands.stop', false, true);
}
adapter.setState(robot.name + '.status.canPause', state.availableCommands.pause, true);
if (state.availableCommands.pause) {
adapter.setState(robot.name + '.commands.pause', false, true);
}
adapter.setState(robot.name + '.status.canResume', state.availableCommands.resume, true);
if (state.availableCommands.resume) {
adapter.setState(robot.name + '.commands.resume', false, true);
}
adapter.setState(robot.name + '.status.canGoToBase', state.availableCommands.goToBase, true);
if (state.availableCommands.goToBase) {
adapter.setState(robot.name + '.commands.goToBase', false, true);
}
adapter.setState(robot.name + '.status.modelName', state.meta.modelName, true);
adapter.setState(robot.name + '.status.firmware', state.meta.firmware, true);
if (typeof callback === 'function') {
callback(null);
}
});
}
! function createDevices(devices, callback) {
var keys = Object.keys(devices);
if (!keys.length) return callback();
var device = keys.shift();
adapter.getObject(device, function (err, obj) {
//next device if device exists
if (obj) {
delete devices[device];
createDevices(devices, callback);
return;
}
//create device
adapter.createDevice(device, function () {
//create channels for device
createChannels(device, devices[device], function () {
//next device
delete devices[device];
createDevices(devices, callback);
});
});
});
}
! function createChannels(device, channels, callback) {
var keys = Object.keys(channels);
if (!keys.length) return callback();
var channel = keys.shift();
adapter.createChannel(device, channel, channels[channel].common, function () {
//create states
createStates(
device,
channel,
channels[channel].states,
function () {
//create next channel
delete channels[channel];
createChannels(device, channels, callback);
}
);
});
}
! function createStates(device, channel, states, callback) {
var keys = Object.keys(states);
if (!keys.length) return callback();
var state = keys.shift();
adapter.createState(device, channel, state, states[state].common, function () {
//create next state
delete states[state];
createStates(device, channel, states, callback);
});
}`
3476_iobroker.admin-01.10.2017_13_00_04.png [/i][/i][/i][/i][/i][/i] -
@Matten Matten:@Pmant
Kannst du das bitte im Adapter mit integrieren? oder kann ich das über "github.com/Pmant/ioBroker.botvac" selbst ändern? `
Wenn du einen GitHub-Account hast, kannst du das Projekt Forken (bzw. einfach bei main.js auf das Editor-Symbol gehen). Sobald du dort deine Änderungen eingepflegt hast, kannst du das einen Pull-Request erstellen, so dass ich die Änderung auch in mein Repository übernehmen kann.
-
@Matten Matten:Wollte nur anmerken, dass der Botvac D5 doch deutlich weniger Optionen hat, als der VR200. Spotbreite und Länge kann man z.B. nicht einstellen.
Frage: gibt es hier jemanden, der im Adapter eine Möglichkeit sieht, die "Extra Care" Funktion des Botvac abzugreifen?
Diese Funktion führt dazu, dass der Robo mehr Abstand zu Möbeln und Co. hält - bei mir ist das z.B. wichtig, weil er ohne diese Funktion immer wirklich auf den cm exakt zwischen die Stuhlbeine fährt und dann nicht mehr rauskommt.
Ich selber bin dafür leider nicht bewandert genug `
Moin, habe es geschafft das navigationMode mit zu integrieren.
(mit meinem kleinen botvac D3)
1= normal
2= extra care
@Pmant
Kannst du das bitte im Adapter mit integrieren? oder kann ich das über "github.com/Pmant/ioBroker.botvac" selbst ändern?
main.js
! ```
`/**- botvac adapter
*/
! /* jshint -W097 */// jshint strict:false
/*jslint node: true /
"use strict";
! var utils = require(__dirname + '/lib/utils'); // Get common adapter utils
var botvac = require('node-botvac');
var client = new botvac.Client();
var allRobotNames = [];
var allRobots = {};
var init = false;
var polltimer;
var pollInterval;
var restartTimer;
! // adapter will be restarted automatically every time as the configuration changed, e.g system.adapter.botvac.0
var adapter = utils.adapter('botvac');
! // is called when adapter shuts down - callback has to be called under any circumstances!
adapter.on('unload', function (callback) {
callback();
});
! // is called if a subscribed state changes
adapter.on('stateChange', function (id, state) {
// you can use the ack flag to detect if it is status (true) or command (false)
if (init && state && !state.ack) {
var arr = id.split('.');
if (arr.length !== 5) {
return;
}
var robotName = arr[2];
var channel = arr[3];
var command = arr[4];
if (allRobotNames.indexOf(robotName) === -1) {
adapter.log.warn('state change in unknown device: ' + robotName);
return;
} else if (channel !== 'commands') {
adapter.log.warn('state change in unknown channel: ' + channel);
return;
}
! switch (command) {
case 'schedule':
if (state.val) {
allRobots[robotName].enableSchedule(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot enable schedule ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
adapter.setState(robotName + '.status.isScheduleEnabled', true, true);
});
} else {
allRobots[robotName].disableSchedule(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot disable schedule ' + robotName);
adapter.setState(id, true, true);
return;
}
adapter.setState(id, false, true);
adapter.setState(robotName + '.status.isScheduleEnabled', false, true);
});
}
break;
case 'clean':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use stop state if you want to stop cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canStart !== true) {
adapter.log.warn('cannot start cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//start cleaning
allRobots[robotName].startCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot start cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'cleanSpot':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use stop state if you want to stop cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canStart !== true) {
adapter.log.warn('cannot start cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//start cleaning
allRobots[robotName].startSpotCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot start cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'pause':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use resume or stop state if you want to resume or stop cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canPause !== true) {
adapter.log.warn('cannot pause cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//pause cleaning
allRobots[robotName].pauseCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot pause cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'resume':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use pause or stop state if you want to pause or stop cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canResume !== true) {
adapter.log.warn('cannot resume cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//resume cleaning
allRobots[robotName].resumeCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot resume cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'stop':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use start or resume state if you want to start or resume cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canStop !== true) {
adapter.log.warn('cannot stop cleaning ' + robotName);
adapter.setState(id, false, true);
return;
}
//stop cleaning
allRobots[robotName].stopCleaning(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot stop cleaning (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'goToBase':
if (!state.val) {
adapter.setState(id, false, true);
adapter.log.warn('use start state if you want to start cleaning ' + robotName);
return;
}
updateRobot(allRobots[robotName], function (error) {
if (error) {
return;
}
if (allRobots[robotName].canGoToBase !== true) {
adapter.log.warn('cannot go to base ' + robotName);
adapter.setState(id, false, true);
return;
}
//go to base
allRobots[robotName].sendToBase(function (error, result) {
if (error || result !== 'ok') {
adapter.log.warn('cannot go to base (2) ' + robotName);
adapter.setState(id, false, true);
return;
}
adapter.setState(id, true, true);
setTimeout(function () {
updateRobot(allRobots[robotName]);
}, 1000);
});
});
break;
case 'eco':
allRobots[robotName].eco = state.val;
adapter.setState(id, state.val, true);
break;
case 'navigationMode':
allRobots[robotName].navigationMode = state.val;
adapter.setState(id, state.val, true);
break;
case 'spotWidth':
allRobots[robotName].spotWidth = state.val;
adapter.setState(id, state.val, true);
break;
case 'spotHeight':
allRobots[robotName].spotHeight = state.val;
adapter.setState(id, state.val, true);
break;
case 'spotRepeat':
allRobots[robotName].spotRepeat = state.val;
adapter.setState(id, state.val, true);
break;
default:
adapter.log.warn('unknown command: ' + command);
return;
}
}
});
! // is called when databases are connected and adapter received configuration.
// start here!
adapter.on('ready', function () {
main();
});
! function restart(ms) {
clearTimeout(restartTimer);
clearInterval(polltimer);
init = false;
restartTimer = setTimeout(main, ms);
}
! function main() {
clearInterval(polltimer);
allRobotNames = [];
allRobots = {};
var mail = adapter.config.mail;
var password = adapter.config.password;
! client.authorize(mail, password, false, function (error) {
if (error) {
adapter.log.warn('login failed');
restart(300000);
return;
}
client.getRobots(function (error, robots) {
if (error || !robots.length) {
adapter.log.warn('no robots found');
restart(300000);
return;
}
var devices = {};
for (var i = 0; i < robots.length; i++) {
if (robots[i].name) {
devices[robots[i].name] = {
'status': {
common: 'meta',
states: {
'reachable': {
common: {
type: 'boolean',
read: true,
write: false,
def: false,
role: 'indicator.reachable'
}
},
'lastResult': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
},
'error': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
},
'state': {
common: {
type: 'number',
read: true,
write: false,
role: 'value'
}
},
'action': {
common: {
type: 'number',
read: true,
write: false,
role: 'value'
}
},
'lastCleaning': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
},
'isCharging': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'isScheduleEnabled': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'isDocked': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'dockHasBeenSeen': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'charge': {
common: {
type: 'number',
read: true,
write: false,
role: 'value.battery'
}
},
'canStart': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'canStop': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'canPause': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'canResume': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'canGoToBase': {
common: {
type: 'boolean',
read: true,
write: false,
role: 'indicator'
}
},
'modelName': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
},
'firmware': {
common: {
type: 'string',
read: true,
write: false,
role: 'text'
}
}
}
},
'commands': {
common: 'button',
states: {
'schedule': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'clean': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'eco': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'navigationMode': {
common: {
type: 'number',
read: true,
write: true,
def: 1,
role: 'level'
}
},
'cleanSpot': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'spotWidth': {
common: {
type: 'number',
read: true,
write: true,
def: 100,
min: 100,
unit: 'cm',
role: 'level.width'
}
},
'spotHeight': {
common: {
type: 'number',
read: true,
write: true,
def: 100,
min: 100,
unit: 'cm',
role: 'level.height'
}
},
'spotRepeat': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'pause': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'resume': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'stop': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
},
'goToBase': {
common: {
type: 'boolean',
read: true,
write: true,
def: false,
role: 'switch'
}
}
}
}
};
allRobots[robots[i].name] = robots[i];
}
}
createDevices(devices, function () {
adapter.log.info('devices found: ' + robots.length);
adapter.getDevices(function (err, devices) {
if (Array.isArray(devices)) {
for (var i = 0; i < devices.length; i++) {
allRobotNames.push(devices[i].common.name);
}
}
//subscribe all states in namespace
init = true;
adapter.subscribeStates('');
pollInterval = adapter.config.pollInterval || 120;
pollInterval = 1000;
if (pollInterval < 60000) pollInterval = 60000;
polltimer = setInterval(update, pollInterval);
update();
});
});
});
});
}
! function update() {
for (var i = 0; i < allRobotNames.length; i++) {
updateRobot(allRobots[allRobotNames[i]]);
}
! /
client.getRobots(function (error, robots) {
adapter.log.warn('getRobots!');
if (error || !robots.length) {
adapter.log.warn('update error or no robot found ' + error);
restart(300000);
return;
}
for (var i = 0; i < allRobotNames.length; i++) {
var k = null;
//check if robot retrieved
for (var j = 0; j < robots.length; j++) {
if (robots[j].name === allRobotNames[i]) {
k = j;
}
if (allRobotNames.indexOf(robots[j].name) === -1) {
adapter.log.warn('new robot found');
restart(5000);
return;
}
}
//robot not retrieved
if (k === null) {
adapter.setState(allRobotNames[i] + '.status.reachable', false, true);
continue;
}
//update robot
adapter.setState(allRobotNames[i] + '.status.reachable', true, true);
updateRobot(robots[k]);
}
});
*/
}
! function updateRobot(robot, callback) {
if (!init) {
return;
}
robot.getState(function (error, state) {
if (error || !state) {
adapter.log.warn('could not update robot ' + robot.name);
adapter.setState(robot.name + '.status.reachable', true, false);
restart(pollInterval);
if (typeof callback === 'function') {
callback('could not update robot' + robot.name);
}
return;
}
adapter.setState(robot.name + '.status.reachable', true, true);
adapter.setState(robot.name + '.status.lastResult', state.result, true);
adapter.setState(robot.name + '.status.error', state.error, true);
adapter.setState(robot.name + '.status.state', state.state, true);
adapter.setState(robot.name + '.status.action', state.action, true);
var lastCleaning = state.cleaning.category === 1 ? 'manual' : state.cleaning.category === 2 ? 'auto' : 'spot';
lastCleaning += state.cleaning.mode === 1 ? ' eco' : ' turbo';
lastCleaning += state.cleaning.modifier === 2 ? ' x2' : '';
adapter.setState(robot.name + '.status.lastCleaning', lastCleaning, true);
adapter.setState(robot.name + '.status.isCharging', state.details.isCharging, true);
adapter.setState(robot.name + '.status.isDocked', state.details.isDocked, true);
adapter.setState(robot.name + '.status.isScheduleEnabled', state.details.isScheduleEnabled, true);
adapter.setState(robot.name + '.commands.schedule', state.details.isScheduleEnabled, true);
adapter.setState(robot.name + '.status.dockHasBeenSeen', state.details.dockHasBeenSeen, true);
adapter.setState(robot.name + '.status.charge', state.details.charge, true);
adapter.setState(robot.name + '.status.canStart', state.availableCommands.start, true);
if (state.availableCommands.start) {
adapter.setState(robot.name + '.commands.clean', false, true);
adapter.setState(robot.name + '.commands.cleanSpot', false, true);
}
adapter.setState(robot.name + '.status.canStop', state.availableCommands.stop, true);
if (state.availableCommands.stop) {
adapter.setState(robot.name + '.commands.stop', false, true);
}
adapter.setState(robot.name + '.status.canPause', state.availableCommands.pause, true);
if (state.availableCommands.pause) {
adapter.setState(robot.name + '.commands.pause', false, true);
}
adapter.setState(robot.name + '.status.canResume', state.availableCommands.resume, true);
if (state.availableCommands.resume) {
adapter.setState(robot.name + '.commands.resume', false, true);
}
adapter.setState(robot.name + '.status.canGoToBase', state.availableCommands.goToBase, true);
if (state.availableCommands.goToBase) {
adapter.setState(robot.name + '.commands.goToBase', false, true);
}
adapter.setState(robot.name + '.status.modelName', state.meta.modelName, true);
adapter.setState(robot.name + '.status.firmware', state.meta.firmware, true);
if (typeof callback === 'function') {
callback(null);
}
});
}
! function createDevices(devices, callback) {
var keys = Object.keys(devices);
if (!keys.length) return callback();
var device = keys.shift();
adapter.getObject(device, function (err, obj) {
//next device if device exists
if (obj) {
delete devices[device];
createDevices(devices, callback);
return;
}
//create device
adapter.createDevice(device, function () {
//create channels for device
createChannels(device, devices[device], function () {
//next device
delete devices[device];
createDevices(devices, callback);
});
});
});
}
! function createChannels(device, channels, callback) {
var keys = Object.keys(channels);
if (!keys.length) return callback();
var channel = keys.shift();
adapter.createChannel(device, channel, channels[channel].common, function () {
//create states
createStates(
device,
channel,
channels[channel].states,
function () {
//create next channel
delete channels[channel];
createChannels(device, channels, callback);
}
);
});
}
! function createStates(device, channel, states, callback) {
var keys = Object.keys(states);
if (!keys.length) return callback();
var state = keys.shift();
adapter.createState(device, channel, state, states[state].common, function () {
//create next state
delete states[state];
createStates(device, channel, states, callback);
});
}! mir ist aber aufgefallen, wenn man den Botvac stoppt und neu startet, bei navigationMode immer noch die 2 (extra care) steht , beim start aber navigationMode 1 (normal) ausgeführt wird. Mann muss also vor einem Adapter Starterst bei navigationMode die 2 erneut schreiben. ! Ich habe es bei mir erst mal so gelöst, das bei Änderung von "canStart" auf "true" -> navigationMode auf 1 gesetzt wird. ! eigentlich müsste er den Wert beim Start auf den Wert von navigationMode setzen. Ich weiß aber noch nicht wie das geschrieben wird. :cry: :oops:[/i][/i][/i][/i][/i][/i] ``` -
So Leute. Gute Nachrichten!
Bei mir läuft das angepasste Neato modul von pman. Danke auch an Phteven! Ich werde das hier noch eine Weile testen, ob alles gut läuft und dann mit Erlaubnis von pman seinen Adapter als Basis nehmen und einen Vorwerk Adapter bauen. Ich hab euch mal einen screenshot von meiner VIS-Oberfläche gemacht:
Grüße EisbaeeerVR200-VIS1.png `
Hallo,
Ich besitze ein VR200 von Vorwerk. Habe versucht in Iobroker über den botvac Adapter einzubinden und es hat nicht geklappt.
Ich habe die 2 Dateien geändert:
In "client.js", line 6 modifizieren zu: this._baseUrl = 'https://vorwerk-beehive-production.herokuapp.com';
In "robot.js", line 5 modifizieren zu: this._baseUrl = 'https://nucleo.ksecosys.com/vendors/vorwerk/robots/';
Nach der installation verlangt der Adapter ein login, mit welche Logindaten soll man sich da einloggen? die von Vorwerk?
Kann mir Jemand vielleicht weiterhelfen?
Gruß
Mihai
-
So Leute. Gute Nachrichten!
Bei mir läuft das angepasste Neato modul von pman. Danke auch an Phteven! Ich werde das hier noch eine Weile testen, ob alles gut läuft und dann mit Erlaubnis von pman seinen Adapter als Basis nehmen und einen Vorwerk Adapter bauen. Ich hab euch mal einen screenshot von meiner VIS-Oberfläche gemacht:
Grüße EisbaeeerVR200-VIS1.png `
Hallo,
Ich besitze ein VR200 von Vorwerk. Habe versucht in Iobroker über den botvac Adapter einzubinden und es hat nicht geklappt.
Ich habe die 2 Dateien geändert:
In "client.js", line 6 modifizieren zu: this._baseUrl = 'https://vorwerk-beehive-production.herokuapp.com';
In "robot.js", line 5 modifizieren zu: this._baseUrl = 'https://nucleo.ksecosys.com/vendors/vorwerk/robots/';
Nach der installation verlangt der Adapter ein login, mit welche Logindaten soll man sich da einloggen? die von Vorwerk?
Kann mir Jemand vielleicht weiterhelfen?
Gruß
Mihai `
probier mal den -> https://www.dropbox.com/s/u5np1f0fmgcd5 … k.rar?dl=0
einfach runterladen,entpacken,und bei "ioBroker\node_modules" reinschmeißen.
den hab ich für nen Kumpel erstellt. Basis ist der Botvac Adapter.
-
@Matten Matten:So Leute. Gute Nachrichten!
Bei mir läuft das angepasste Neato modul von pman. Danke auch an Phteven! Ich werde das hier noch eine Weile testen, ob alles gut läuft und dann mit Erlaubnis von pman seinen Adapter als Basis nehmen und einen Vorwerk Adapter bauen. Ich hab euch mal einen screenshot von meiner VIS-Oberfläche gemacht:
Grüße EisbaeeerVR200-VIS1.png `
Hallo,
Ich besitze ein VR200 von Vorwerk. Habe versucht in Iobroker über den botvac Adapter einzubinden und es hat nicht geklappt.
Ich habe die 2 Dateien geändert:
In "client.js", line 6 modifizieren zu: this._baseUrl = 'https://vorwerk-beehive-production.herokuapp.com';
In "robot.js", line 5 modifizieren zu: this._baseUrl = 'https://nucleo.ksecosys.com/vendors/vorwerk/robots/';
Nach der installation verlangt der Adapter ein login, mit welche Logindaten soll man sich da einloggen? die von Vorwerk?
Kann mir Jemand vielleicht weiterhelfen?
Gruß
Mihai `
probier mal den -> https://www.dropbox.com/s/u5np1f0fmgcd5 … k.rar?dl=0
einfach runterladen,entpacken,und bei "ioBroker\node_modules" reinschmeißen.
den hab ich für nen Kumpel erstellt. Basis ist der Botvac Adapter. `
Danke für die schnelle Antwort und für den Adapter.
Ich habe Ihn installiert, nur mit welchen login soll ich mich einloggen? Mit derr Vorwerk login geht nicht.Mit den botvac Daten funktioniert der Login. Kann man den Vorwerk bei Botvac als Gerät einfügen? Wenn ja, wie?
"vorwerk.0 2017-11-02 09:03:55.710 warn no robots found"
Danke und Gruß
Mihai
-
@Matten Matten:Hallo,
Ich besitze ein VR200 von Vorwerk. Habe versucht in Iobroker über den botvac Adapter einzubinden und es hat nicht geklappt.
Ich habe die 2 Dateien geändert:
In "client.js", line 6 modifizieren zu: this._baseUrl = 'https://vorwerk-beehive-production.herokuapp.com';
In "robot.js", line 5 modifizieren zu: this._baseUrl = 'https://nucleo.ksecosys.com/vendors/vorwerk/robots/';
Nach der installation verlangt der Adapter ein login, mit welche Logindaten soll man sich da einloggen? die von Vorwerk?
Kann mir Jemand vielleicht weiterhelfen?
Gruß
Mihai `
probier mal den -> https://www.dropbox.com/s/u5np1f0fmgcd5 … k.rar?dl=0
einfach runterladen,entpacken,und bei "ioBroker\node_modules" reinschmeißen.
den hab ich für nen Kumpel erstellt. Basis ist der Botvac Adapter. `
Danke für die schnelle Antwort und für den Adapter.
Ich habe Ihn installiert, nur mit welchen login soll ich mich einloggen? Mit derr Vorwerk login geht nicht.Mit den botvac Daten funktioniert der Login. Kann man den Vorwerk bei Botvac als Gerät einfügen? Wenn ja, wie?
"vorwerk.0 2017-11-02 09:03:55.710 warn no robots found"
Danke und Gruß
Mihai `
Ist der Vorwerk Staubsauger schon geupdatet worden? Also per WLAN ansteuerbar und bei deinem vorwerk Account registriert? Mit der original Vorwerk App hast du eine Verbindung zum Staubsauger und kannst ihn fernsteuern?
-
@Matten Matten:@Matten Matten:probier mal den -> https://www.dropbox.com/s/u5np1f0fmgcd5 … k.rar?dl=0
einfach runterladen,entpacken,und bei "ioBroker\node_modules" reinschmeißen.
den hab ich für nen Kumpel erstellt. Basis ist der Botvac Adapter. `
Danke für die schnelle Antwort und für den Adapter.
Ich habe Ihn installiert, nur mit welchen login soll ich mich einloggen? Mit derr Vorwerk login geht nicht.Mit den botvac Daten funktioniert der Login. Kann man den Vorwerk bei Botvac als Gerät einfügen? Wenn ja, wie?
"vorwerk.0 2017-11-02 09:03:55.710 warn no robots found"
Danke und Gruß
Mihai `
Ist der Vorwerk Staubsauger schon geupdatet worden? Also per WLAN ansteuerbar und bei deinem vorwerk Account registriert? Mit der original Vorwerk App hast du eine Verbindung zum Staubsauger und kannst ihn fernsteuern? `
Ja der hat die Neue Firmware, und kann Ihn per App steuern also auch an Wlan Verbunden. Die Logindaten welche ich bei der App nutze habe ich auch im Adapter eingetragen und kommt die Meldung
"vorwerk.0 2017-11-02 12:21:54.631 warn login failed"
wenn ich die logindaten von botvac benutze bekomme ich die Meldung:
"vorwerk.0 2017-11-02 09:03:55.710 warn no robots found"
-
OK, das Problem ist das ich ein NEATO besitze und kein Vorwerk. Deshalb muss ich schauen ob ich den Fehler reproduzieren kann.
-
Seit kurzen unterstürzt Alexa den Vorwerk Roboter
http://stadt-bremerhaven.de/vorwerk-vr2 … exa-skill/
:roll:
-
Hallo Eisbaeeer,
bin nun auch Neato besitzer.
Kannst du nochmal deine View hochladen?
Vielen Dank im Vorraus.
@ple:Kannst du deine View noch mal online stellen???
Gruß und besten Dank. `
Hier nochmal der View. Unter dem Link sind auch die notwendigen Grafiken mit drin.
Die Gültigkeit läuft am 31.7. ab.
! https://oisnczog0ig6s79i.myfritz.net/in … O8KsC5iE08
! Kennwort: iobrokerGrüße Eisbaeeer `
-
Hallo Feuer123
Du findest den View im Anhang. Ich habe die benötigten Images mit reingepackt.
Gruß Eisbaeeer
139_vr200.zip -
Hallo Pman,
wäre klasse wenn du den Adapter um den Vorwerk VR200 erweitern könntest.
Für FHEM wurde dies schon vorgenommen. Als Basis hat ebenfalls die Arbeit vn Kangguru gedient.
https://raw.githubusercontent.com/vuffi … _BOTVAC.pm
Gruß,
Matze `
Hmm, inzwischen gibt es hier ein npm-module. Damit wäre ein VR200 Adapter sehr einfach zu realisieren. Wäre sicher einfacher, als den Neato anzupassen. Was meinen die VR200 Besitzer?
https://github.com/nicoh88/node-kobold/
Gruß Eisbaeeer
-
Hallo Eisbaeeer,
Ein funktionsfähiger Adapter wäre prima.
Dieses Modul habe ich gestern auch gefunden und habe nun begonnen mich mal ein zulesen wie man einen Adapter baut.
Da ich aber von FHEM komme und ich im Moment sehr eingespannt bin mit der Arbeit. (Serverumgebung wird ern bei uns im Geschäft) kann dies wirklich noch dauern.
Bin auf jeden fall gerne Tester.
Grüße
Jan
-
Hallo Eisbaeeer,
Ein funktionsfähiger Adapter wäre prima.
Dieses Modul habe ich gestern auch gefunden und habe nun begonnen mich mal ein zulesen wie man einen Adapter baut.
Da ich aber von FHEM komme und ich im Moment sehr eingespannt bin mit der Arbeit. (Serverumgebung wird ern bei uns im Geschäft) kann dies wirklich noch dauern.
Bin auf jeden fall gerne Tester.
Grüße
Jan ` Hallo Jan
Ich muss auch noch unsere VM Umgebung patchen.
Gilt nicht als Ausrede
")
Gesendet von meinem SM-G950F mit Tapatalk
-
Hey, gibt es hier was neues?
Würde mich sehr freuen.
Grüße Marco
-
Hey, gibt es hier was neues?
Würde mich sehr freuen.
Grüße Marco `
Hallo Marco
Versuch mal den folgenden Adapter per Github in iobroker zu installieren:
Sollte funktionieren. Warte gerne auf Rückmeldung.
Gruß Eisbaeeer
-
Sollte funktionieren. Warte gerne auf Rückmeldung.
Gruß Eisbaeeer `
Bei mir hat die Installation und die Datenabfrage auf Anhieb funktioniert

Vielen Dank :!:
-
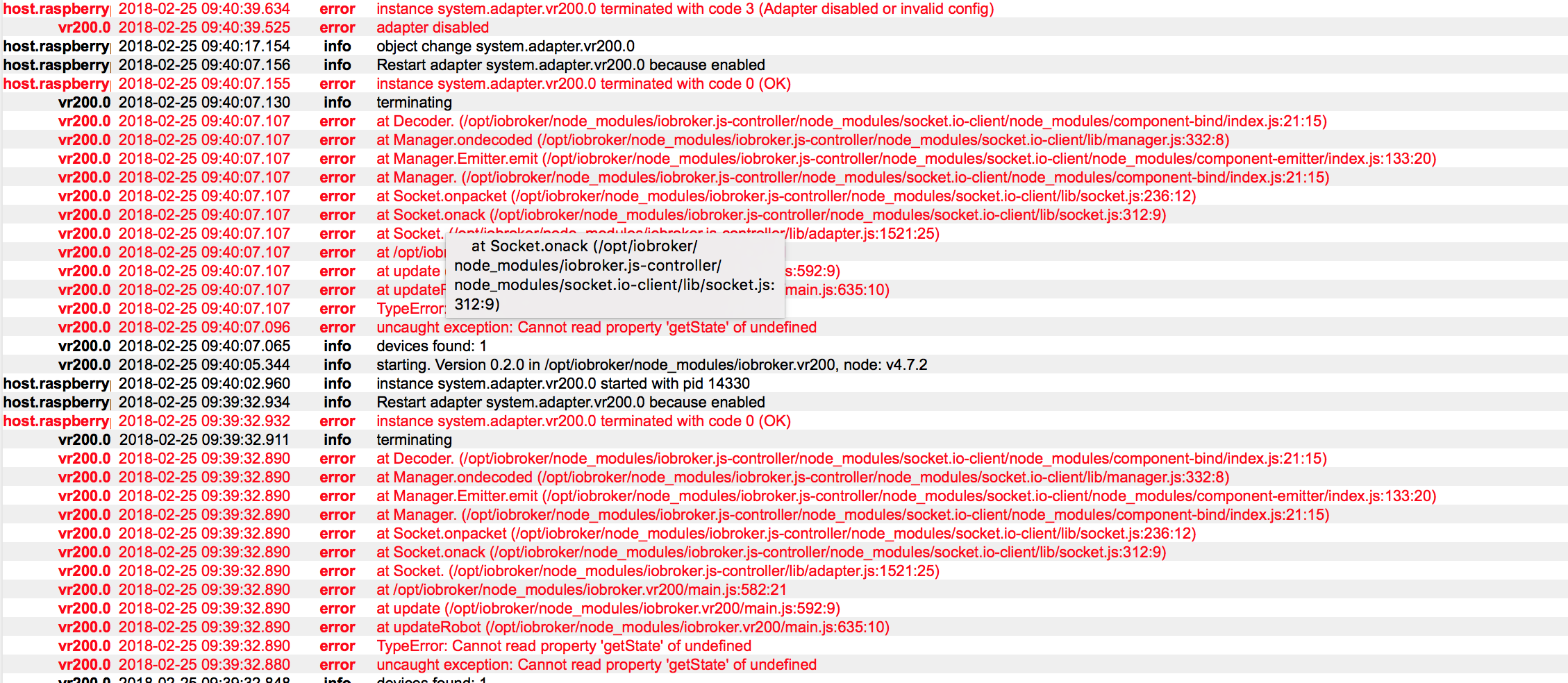
Der Vorwerk VR200 ist ab sofort auch als npm verfügbar. Ein Pull-request ist auch gemacht. Sollte also bald in der Adapter Liste erscheinen.
Gruß Eisbaeeer
-
Der Vorwerk VR200 ist ab sofort auch als npm verfügbar. Ein Pull-request ist auch gemacht. Sollte also bald in der Adapter Liste erscheinen.
Gruß Eisbaeeer `
Danke Euch dafür, habe den Adapter installiert nur leider bekomme ich keinen Status ausgelesen.. Im Log sind folgende Fehlermeldungen zu finden.
Habe ich etwas falsch gemacht?
VG

{kind=link}
{kind=link}