

Ecovacs Deebot Adapter: Informationen und Praxistipps
-
Hallo zusammen,
ich möchte hier einen Topic bereitstellen, wo man Tipps und Tricks zum Ecovacs Deebot Adapter austauschen kann und Funktionen vorgestellt werden.
Das letztgenannte sollte i.d.R. mein Job sein - aber ich begrüße auch jeden anderen Beitrag in der Richtung ;)Feedback und Anregungen zu den vorgestellten Themen und Funktionen sind ebenfalls willkommen :)
Übersicht
- Der Staubbehälter
- Speichern und Wiederverwendung von Benutzerdefinierten Bereichen
- Namen der Bereiche (Spot Areas) dauerhaft umbenennen
- Automatisches Anhalten
- Karte der letzten Reinigung
- Aktuelle Karte erstellen
- "Spot Areas" für die nächste Bereichs-Reinigung markieren
Weitere Informationen:
Möglichkeit für sonstiges Feedback:
Nützliche Links:
Speichern und Wiederverwendung von Benutzerdefinierten Bereichen (Custom Areas)
Datenpunkte
Koordinaten
- "map.currentUsedCustomAreaValues":
Die Koordinaten der aktuell durchgeführte Benutzerdefinierten Reinigung
Hinweis: wird bei abgeschlossener Reinigung geleert - "map.lastUsedCustomAreaValues":
Die Koordinaten der zuletzt durchgeführten Benutzerdefinierten Reinigung
Funktionen
- "map.lastUsedCustomAreaValues_rerun":
Button zum erneuten Ausführen der zuletzt durchgeführten Benutzerdefinierten Reinigung - "map.lastUsedCustomAreaValues_save"
Button zum Speichern der Koordinaten der zuletzt durchgeführten Reinigung
Gespeicherte Bereiche/Koordinaten
- "map.savedCustomAreas"
Der Kanal in welchem die Werte gespeichert werden - "map.savedCustomAreas.customArea_1652337535"
Beispiel für einen gespeicherten Bereich
Der Datenpunkt ist als Button angelegt, so dass der gespeicherte Bereich direkt ausgeführt werden kann
Erstellen der Bereiche
Für das Erstellen wird noch die Ecovacs Mobile App benötigt. Dort muss jede Benutzerdefinierte Reinigung einmalig ausgeführt werden, wenn man diese auf der Karte einzeichnen möchte. Natürlich kann man z.B. auch unter "control.customArea" manuell Koordinaten eintragen und diese reinigen lassen - aber das geht halt in der App komfortabler.
Den jeweiligen Bereich kann man nun mit "map.lastUsedCustomAreaValues_save" speichern, wenn der Wert unter "map.lastUsedCustomAreaValues" aktualisiert wurde.
Den Bereichen kann man anschließend einen sprechenden Namen geben ("Objekt bearbeiten" => "Common" => "Name"), wie z.B. "Unter dem Esstisch".
Per Button kann der Bereich direkt wiederverwendet werden. -
Namen der Bereiche (Spot Areas) dauerhaft umbenennen
Für die meisten Modelle sind die Namen von Bereichen auf eine begrenzte Vorauswahl eingeschränkt (z.B. OZMO 950, T8 Serie) oder können erst gar nicht mit Namen versehen werden (z.B. OZMO 930, Deebot 900/901).
Standardmäßig werden die Namen (bzw. Labels) der über die Mobile App zugewiesenen Bereiche beim Start des Adapters jeweils in die Datenpunkte der SpotAreas übernommen ("map.[mapID].spotAreas.[spotAreaID].spotAreaName").
Wenn der Wunsch besteht einzelne (oder alle) Bereiche mit einer individuellen Namen zu versehen, muss man dafür in den Adapter-Einstellungen unter "Erweitert" Anpassungen vornehmen.
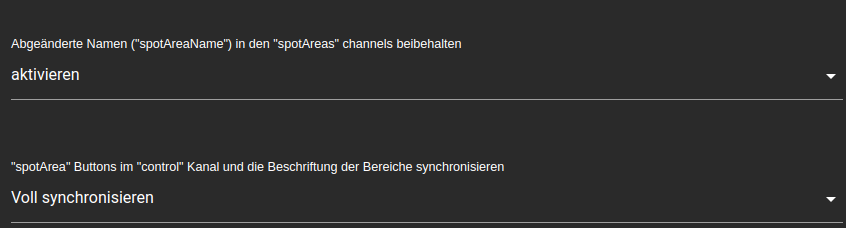
Empfehlenswert ist in diesem Zuge noch zusätzlich einzustellen, dass die Namen synchronisiert werden. Ist dies eingestellt werden zusätzlich noch Datenpunkte für die SpotAreas im "control" Kanal erstellt und im Feld "Name" entsprechend benannt.

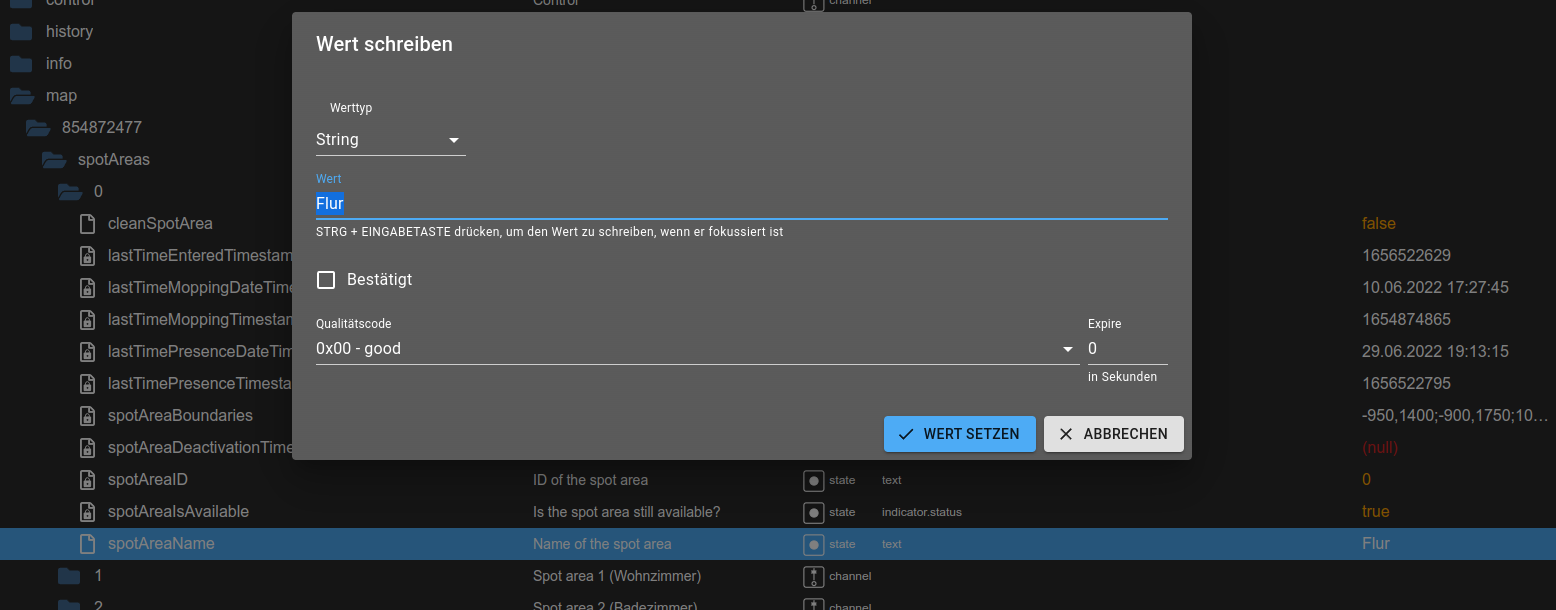
Das Ändern der Namen der Bereiche geschieht über den Datenpunkt "spotAreaName" über den o.g. Pfad.
-
Namen der Bereiche (Spot Areas) dauerhaft umbenennen
Für die meisten Modelle sind die Namen von Bereichen auf eine begrenzte Vorauswahl eingeschränkt (z.B. OZMO 950, T8 Serie) oder können erst gar nicht mit Namen versehen werden (z.B. OZMO 930, Deebot 900/901).
Standardmäßig werden die Namen (bzw. Labels) der über die Mobile App zugewiesenen Bereiche beim Start des Adapters jeweils in die Datenpunkte der SpotAreas übernommen ("map.[mapID].spotAreas.[spotAreaID].spotAreaName").
Wenn der Wunsch besteht einzelne (oder alle) Bereiche mit einer individuellen Namen zu versehen, muss man dafür in den Adapter-Einstellungen unter "Erweitert" Anpassungen vornehmen.
Empfehlenswert ist in diesem Zuge noch zusätzlich einzustellen, dass die Namen synchronisiert werden. Ist dies eingestellt werden zusätzlich noch Datenpunkte für die SpotAreas im "control" Kanal erstellt und im Feld "Name" entsprechend benannt.
Das Ändern der Namen der Bereiche geschieht über den Datenpunkt "spotAreaName" über den o.g. Pfad.
@mrbungle64
Danke für deine ersten Infos zum Ecovacs iobroker Adapter.
Ich habe mir heute den T9 AIVI inkl. Absaugstation bestellt und hoffe auch bei diesem Model auf viele Datenpunkte für meine VIS.thx Timee
-
Hallo zusammen,
ich möchte hier einen Topic bereitstellen, wo man Tipps und Tricks zum Ecovacs Deebot Adapter austauschen kann und Funktionen vorgestellt werden.
Das letztgenannte sollte i.d.R. mein Job sein - aber ich begrüße auch jeden anderen Beitrag in der Richtung ;)Feedback und Anregungen zu den vorgestellten Themen und Funktionen sind ebenfalls willkommen :)
Übersicht
- Der Staubbehälter
- Speichern und Wiederverwendung von Benutzerdefinierten Bereichen
- Namen der Bereiche (Spot Areas) dauerhaft umbenennen
- Automatisches Anhalten
- Karte der letzten Reinigung
- Aktuelle Karte erstellen
- "Spot Areas" für die nächste Bereichs-Reinigung markieren
Weitere Informationen:
Möglichkeit für sonstiges Feedback:
Nützliche Links:
Ich hatte hier lange kein Feedback bekommen - das scheint sich ja so langsam zu ändern ;)
Wenn es hier also doch Interesse an solchen "Informationen und Praxistipps" gibt, dann würde ich mal weitere Beiträge vorbereiten. Themenwünsche wären natürlich willkommen :)
-
Ich hatte hier lange kein Feedback bekommen - das scheint sich ja so langsam zu ändern ;)
Wenn es hier also doch Interesse an solchen "Informationen und Praxistipps" gibt, dann würde ich mal weitere Beiträge vorbereiten. Themenwünsche wären natürlich willkommen :)
@mrbungle64
Hi,
finde die Idee auch sehr cool.
Mir fehlt momentan nur die Zeit das ganze umzusetzen.
Ich habe vorab mal eine Frage. bzw auch ein Problem was ich momentan mit meinem T9 habe.
Ich wohne in einem Einfamilienhaus.
EG kennt der T9 weil er die Karte dazu hat. soweit so gut.
Ab und zu soll der T9 aber auf im OG fahren. Er fährt dann natürlich ohne Karte.
Wenn er dann aber oben gefahren ist und im EG wieder seinen Dienst antreten soll, findet er die Karte nicht mehr und fängt ohne Karte an.Besteht eine Möglichkeit im EG sowie im OG eine Karte zu "erfahren", die dann irgendwo im Broker abgespeichert wird, so dass ich immer auf die Map zugreifen kann ? in der eigentlichen App funktioniert zwar eine Mehrgeschosskarte aber der T9 denkt immer, er wäre im EG unterwegs...
Danke
Gruß Marcell
-
@mrbungle64
Hi,
finde die Idee auch sehr cool.
Mir fehlt momentan nur die Zeit das ganze umzusetzen.
Ich habe vorab mal eine Frage. bzw auch ein Problem was ich momentan mit meinem T9 habe.
Ich wohne in einem Einfamilienhaus.
EG kennt der T9 weil er die Karte dazu hat. soweit so gut.
Ab und zu soll der T9 aber auf im OG fahren. Er fährt dann natürlich ohne Karte.
Wenn er dann aber oben gefahren ist und im EG wieder seinen Dienst antreten soll, findet er die Karte nicht mehr und fängt ohne Karte an.Besteht eine Möglichkeit im EG sowie im OG eine Karte zu "erfahren", die dann irgendwo im Broker abgespeichert wird, so dass ich immer auf die Map zugreifen kann ? in der eigentlichen App funktioniert zwar eine Mehrgeschosskarte aber der T9 denkt immer, er wäre im EG unterwegs...
Danke
@kellerkind-86 sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
@mrbungle64
Hi,
finde die Idee auch sehr cool.Danke für das Feedback

Mir fehlt momentan nur die Zeit das ganze umzusetzen.
Ich habe vorab mal eine Frage. bzw auch ein Problem was ich momentan mit meinem T9 habe.
Ich wohne in einem Einfamilienhaus.
EG kennt der T9 weil er die Karte dazu hat. soweit so gut.
Ab und zu soll der T9 aber auf im OG fahren. Er fährt dann natürlich ohne Karte.
Wenn er dann aber oben gefahren ist und im EG wieder seinen Dienst antreten soll, findet er die Karte nicht mehr und fängt ohne Karte an.Besteht eine Möglichkeit im EG sowie im OG eine Karte zu "erfahren", die dann irgendwo im Broker abgespeichert wird, so dass ich immer auf die Map zugreifen kann ? in der eigentlichen App funktioniert zwar eine Mehrgeschosskarte aber der T9 denkt immer, er wäre im EG unterwegs...
Das geht leider nicht.
Aber hast du das alles soweit eingerichtet, dass mehrere Karten gespeichert werden?
Du musst dafür den "Erweiterten Modus" aktivieren und beim T9 kann man den Roboter wohl einfach in die andere Etage stellen (ohne dass man einmalig die Ladestation dafür benötigt). Die Position sollte nur nicht die gleiche sein wie die wo die Ladestation auf der bereits kartierten Etage ist.
Nach Abschluss der Auto-Reinigung (per App starten - nicht am Roboter) sollte die Karte dann gespeichert werden können.
Hinweis: falls es die Option "Mehrgeschosskarte" gibt sollte die natürlich aktiviert werden - aber die gibt es ggf. beim T9 nicht mehr.Danke
-
@kellerkind-86 sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
@mrbungle64
Hi,
finde die Idee auch sehr cool.Danke für das Feedback
Mir fehlt momentan nur die Zeit das ganze umzusetzen.
Ich habe vorab mal eine Frage. bzw auch ein Problem was ich momentan mit meinem T9 habe.
Ich wohne in einem Einfamilienhaus.
EG kennt der T9 weil er die Karte dazu hat. soweit so gut.
Ab und zu soll der T9 aber auf im OG fahren. Er fährt dann natürlich ohne Karte.
Wenn er dann aber oben gefahren ist und im EG wieder seinen Dienst antreten soll, findet er die Karte nicht mehr und fängt ohne Karte an.Besteht eine Möglichkeit im EG sowie im OG eine Karte zu "erfahren", die dann irgendwo im Broker abgespeichert wird, so dass ich immer auf die Map zugreifen kann ? in der eigentlichen App funktioniert zwar eine Mehrgeschosskarte aber der T9 denkt immer, er wäre im EG unterwegs...
Das geht leider nicht.
Aber hast du das alles soweit eingerichtet, dass mehrere Karten gespeichert werden?
Du musst dafür den "Erweiterten Modus" aktivieren und beim T9 kann man den Roboter wohl einfach in die andere Etage stellen (ohne dass man einmalig die Ladestation dafür benötigt). Die Position sollte nur nicht die gleiche sein wie die wo die Ladestation auf der bereits kartierten Etage ist.
Nach Abschluss der Auto-Reinigung (per App starten - nicht am Roboter) sollte die Karte dann gespeichert werden können.
Hinweis: falls es die Option "Mehrgeschosskarte" gibt sollte die natürlich aktiviert werden - aber die gibt es ggf. beim T9 nicht mehr.Danke
Aber hast du das alles soweit eingerichtet, dass mehrere Karten gespeichert werden?
Du musst dafür den "Erweiterten Modus" aktivieren und beim T9 kann man den Roboter wohl einfach in die andere Etage stellen (ohne dass man einmalig die Ladestation dafür benötigt). Die Position sollte nur nicht die gleiche sein wie die wo die Ladestation auf der bereits kartierten Etage ist.
Nach Abschluss der Auto-Reinigung (per App starten - nicht am Roboter) sollte die Karte dann gespeichert werden können.
Hinweis: falls es die Option "Mehrgeschosskarte" gibt sollte die natürlich aktiviert werden - aber die gibt es ggf. beim T9 nicht mehr.@kellerkind-86, hattest du das mal geprüft bzw. ausprobiert?
-
Aber hast du das alles soweit eingerichtet, dass mehrere Karten gespeichert werden?
Du musst dafür den "Erweiterten Modus" aktivieren und beim T9 kann man den Roboter wohl einfach in die andere Etage stellen (ohne dass man einmalig die Ladestation dafür benötigt). Die Position sollte nur nicht die gleiche sein wie die wo die Ladestation auf der bereits kartierten Etage ist.
Nach Abschluss der Auto-Reinigung (per App starten - nicht am Roboter) sollte die Karte dann gespeichert werden können.
Hinweis: falls es die Option "Mehrgeschosskarte" gibt sollte die natürlich aktiviert werden - aber die gibt es ggf. beim T9 nicht mehr.@kellerkind-86, hattest du das mal geprüft bzw. ausprobiert?
bekomme es leider so nicht umgesetzt..
Gruß Marcell
-
bekomme es leider so nicht umgesetzt..
@kellerkind-86 sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
bekomme es leider so nicht umgesetzt..
Hast Du das Gerät orten lassen nachdem Du ihn in's OG gepackt hast?
Du könntest dann auch ggf. noch einen Standort wählen, der nicht mehr oder zufällig einem im EG gleicht. -
Hallo zusammen,
ich möchte hier einen Topic bereitstellen, wo man Tipps und Tricks zum Ecovacs Deebot Adapter austauschen kann und Funktionen vorgestellt werden.
Das letztgenannte sollte i.d.R. mein Job sein - aber ich begrüße auch jeden anderen Beitrag in der Richtung ;)Feedback und Anregungen zu den vorgestellten Themen und Funktionen sind ebenfalls willkommen :)
Übersicht
- Der Staubbehälter
- Speichern und Wiederverwendung von Benutzerdefinierten Bereichen
- Namen der Bereiche (Spot Areas) dauerhaft umbenennen
- Automatisches Anhalten
- Karte der letzten Reinigung
- Aktuelle Karte erstellen
- "Spot Areas" für die nächste Bereichs-Reinigung markieren
Weitere Informationen:
Möglichkeit für sonstiges Feedback:
Nützliche Links:
Automatisches Anhalten
Es gibt verschiedene Möglichkeiten den Roboter automatisch anhalten zu lassen.
Vor der Ladestation
- "control.extended.pauseBeforeDockingChargingStation"
- "control.extended.pauseBeforeDockingIfWaterboxInstalled"
Use Cases hierfür sind z.B. den Roboter vor der Ladestation warten zu lassen, wenn gewischt wurde, um noch mal eine "harte" Erinnerung zu haben das Wischtuch zu entfernen oder wenn die Ladestation zum Abnehmen des Wischbehälters nicht so gut erreichbar ist ("pauseBeforeDockingIfWaterboxInstalled"). Das letztgenannte kann auch beim Staubbehälter hilfreich sein ("pauseBeforeDockingChargingStation").
"pauseBeforeDockingChargingStation" wird bei erreichen wieder auf "false" gesetzt - ist also eher was für Skripte.
"pauseBeforeDockingIfWaterboxInstalled" bleibt dauerhaft auf "true", bis man es auf manuell oder per Skript auf "false" setzt.Für diese zwei Funktionen sind noch folgende Optionen in den Adapter-Einstellungen nützlich:
Größe des Bereichs zur Erkennung des Bereichs vor der Ladestation ("control.extended.pauseBeforeDocking"):
Hier kann die gewünschte Größe des Bereichs angegeben werden, in welchem der Roboter um die Ladestation halten soll"Pause" oder "Stop" senden ("control.extended.pauseBeforeDocking[...]"):
Nicht jedes Modell reagiert beim Zurückfahren zur Ladestation auf "Pause" - daher kann hier auch "Stop" ausgewählt werden, falls dies beim eingesetzten Gerät der Fall ist.Beim Eintreten und Verlassen eines Bereichs bzw. eines Zimmers
- "control.extended.pauseWhenEnteringSpotArea"
- "control.extended.pauseWhenLeavingSpotArea"
Hierfür könnte ein Use Case sein, wenn ein Bereich bzw. Zimmer spezielle Eigenschaften hat, wo man gerne manuell eingreifen möchte oder muss, wenn der Roboter rein oder raus fährt. Als Wert muss jeweils die ID der Spot Area eingetragen werden.
-
Hallo zusammen,
ich möchte hier einen Topic bereitstellen, wo man Tipps und Tricks zum Ecovacs Deebot Adapter austauschen kann und Funktionen vorgestellt werden.
Das letztgenannte sollte i.d.R. mein Job sein - aber ich begrüße auch jeden anderen Beitrag in der Richtung ;)Feedback und Anregungen zu den vorgestellten Themen und Funktionen sind ebenfalls willkommen :)
Übersicht
- Der Staubbehälter
- Speichern und Wiederverwendung von Benutzerdefinierten Bereichen
- Namen der Bereiche (Spot Areas) dauerhaft umbenennen
- Automatisches Anhalten
- Karte der letzten Reinigung
- Aktuelle Karte erstellen
- "Spot Areas" für die nächste Bereichs-Reinigung markieren
Weitere Informationen:
Möglichkeit für sonstiges Feedback:
Nützliche Links:
Karte der letzten Reinigung
Ein paar kurze Infos:
- Die verlinkte Karte unter "cleaninglog.lastCleaningMapImageURL" ist die aktuellste Karte aus dem Reinigungsprotokoll ("cleaninglog.last20Logs").
- Im JSON vom Reinigungsprotokoll gibt es jeweils das Property "imageURL", wo noch mal für jede Reinigung eine individuelle Karte verlinkt ist.
- Diese Karten entsprechen den Karten aus dem Reinigungsprotokoll der Ecovacs Home App (sind also nicht vom Adapter erstellt) und werden erst nach Abschluss der Reinigung erstellt.
- Ältere Modelle können diese Funktion nicht nutzen, da diese Karten gar nicht von Ecovacs gespeichert werden. Das kann man prüfen, indem man schaut ob im Reinigungsprotokoll der Ecovacs Home App Karten zu sehen sind.
- Bei aktuellen Modellen (ab dem T9) ist die Karte über die URL nicht mehr so einfach erreichbar, denn man muss dafür nun authentifiziert sein.
Wegen dem letztgenannten Punkt gibt es nun folgendes Feature:
 Das Bild der letzten Reinigung kann nun automatisch heruntergeladen geladen werden.
Das Bild der letzten Reinigung kann nun automatisch heruntergeladen geladen werden.
Pfad und Dateiname werden im Datenpunkt "cleaninglog.lastCleaningMapImageFile" eingetragen.In den Adapter-Einstellungen gibt es unter dem Punkt "Automatisches Herunterladen vom Image der letzten Reinigung" verschiedene Optionen:
- Vorauswahl verwenden
- aktivieren und alle Karten als Datei behalten
- aktivieren und die aktuellste Karte als Datei behalten
- deaktivieren
Diese Funktion kann auch bei Geräten genutzt werden, wo die "lastCleaningMapImageURL" auch direkt erreichbar ist (z.B. OZMO 950, Deebot T8).
-
Hallo zusammen,
ich möchte hier einen Topic bereitstellen, wo man Tipps und Tricks zum Ecovacs Deebot Adapter austauschen kann und Funktionen vorgestellt werden.
Das letztgenannte sollte i.d.R. mein Job sein - aber ich begrüße auch jeden anderen Beitrag in der Richtung ;)Feedback und Anregungen zu den vorgestellten Themen und Funktionen sind ebenfalls willkommen :)
Übersicht
- Der Staubbehälter
- Speichern und Wiederverwendung von Benutzerdefinierten Bereichen
- Namen der Bereiche (Spot Areas) dauerhaft umbenennen
- Automatisches Anhalten
- Karte der letzten Reinigung
- Aktuelle Karte erstellen
- "Spot Areas" für die nächste Bereichs-Reinigung markieren
Weitere Informationen:
Möglichkeit für sonstiges Feedback:
Nützliche Links:
Aktuelle Karte erstellen
Eine Karte mit jeweils aktuellen Daten lässt sich über den Datenpunkt "map.[mapID].loadMapImage" erstellen. Diese wird im Datenpunkt "map.[mapID].map64" als "Base64 encoded image" abgelegt.
Seit Version 1.4.9 wird dies nun aber auch autom. im Dateisystem unter dem Namen "currentCleaningMapImage_[mapID].png" abgelegt (mapID ist anhängig von der jeweiligen Map).Diese Karte wird (im Gegensatz zur Karte der letzten Reinigung) vom Adapter erstellt und kann leider weiterhin nicht als Live-Map benutzt werden.
 Möchte man die Karte im Intervall erzeugen wollen sollte man bedenken, dass dies vergleichsweise Rechen-intensiv ist und Raspberry Pis und andere Computer mit überschaubaren Hardware-Ressourcen schnell überfordern kann, wenn das Intervall zu kurz ist. Das müsste man jeweils individuell herausfinden, aber ich empfehle grundsätzlich kein kürzeres Intervall als 30 Sekunden.
Möchte man die Karte im Intervall erzeugen wollen sollte man bedenken, dass dies vergleichsweise Rechen-intensiv ist und Raspberry Pis und andere Computer mit überschaubaren Hardware-Ressourcen schnell überfordern kann, wenn das Intervall zu kurz ist. Das müsste man jeweils individuell herausfinden, aber ich empfehle grundsätzlich kein kürzeres Intervall als 30 Sekunden. Falls die o.g. Datenpunkte nicht vorhanden sind kann man diese über die folgende Einstellung aktivieren:
Falls die o.g. Datenpunkte nicht vorhanden sind kann man diese über die folgende Einstellung aktivieren:
"Funktion zum Laden einer statischen Map ("map.[mapID].loadMapImage")" -
Hallo zusammen,
ich möchte hier einen Topic bereitstellen, wo man Tipps und Tricks zum Ecovacs Deebot Adapter austauschen kann und Funktionen vorgestellt werden.
Das letztgenannte sollte i.d.R. mein Job sein - aber ich begrüße auch jeden anderen Beitrag in der Richtung ;)Feedback und Anregungen zu den vorgestellten Themen und Funktionen sind ebenfalls willkommen :)
Übersicht
- Der Staubbehälter
- Speichern und Wiederverwendung von Benutzerdefinierten Bereichen
- Namen der Bereiche (Spot Areas) dauerhaft umbenennen
- Automatisches Anhalten
- Karte der letzten Reinigung
- Aktuelle Karte erstellen
- "Spot Areas" für die nächste Bereichs-Reinigung markieren
Weitere Informationen:
Möglichkeit für sonstiges Feedback:
Nützliche Links:
"Spot Areas" für die nächste Bereichs-Reinigung markieren
Es gibt seit der Version 1.4.10 die Möglichkeit Bereiche ("Spot Areas") für die nächste Reinigung zu markieren. Dies kann z.B. für eine VIS nützlich sein, wenn man per Button die Bereiche an- und ausschalten möchte.Die Datenpunkte dazu befinden sich im jeweiligen "Spot Area" Kanal:
"map.[mapID].spotAreas.[spotAreaID].markForNextSpotAreaCleaning"Gestartet wird die Reinigung dann über den Datenpunkt "control.extended.cleanMarkedSpotAreas".
-
Aktuelle Karte erstellen
Eine Karte mit jeweils aktuellen Daten lässt sich über den Datenpunkt "map.[mapID].loadMapImage" erstellen. Diese wird im Datenpunkt "map.[mapID].map64" als "Base64 encoded image" abgelegt.
Seit Version 1.4.9 wird dies nun aber auch autom. im Dateisystem unter dem Namen "currentCleaningMapImage_[mapID].png" abgelegt (mapID ist anhängig von der jeweiligen Map).Diese Karte wird (im Gegensatz zur Karte der letzten Reinigung) vom Adapter erstellt und kann leider weiterhin nicht als Live-Map benutzt werden.
Möchte man die Karte im Intervall erzeugen wollen sollte man bedenken, dass dies vergleichsweise Rechen-intensiv ist und Raspberry Pis und andere Computer mit überschaubaren Hardware-Ressourcen schnell überfordern kann, wenn das Intervall zu kurz ist. Das müsste man jeweils individuell herausfinden, aber ich empfehle grundsätzlich kein kürzeres Intervall als 30 Sekunden. Falls die o.g. Datenpunkte nicht vorhanden sind kann man diese über die folgende Einstellung aktivieren:
"Funktion zum Laden einer statischen Map ("map.[mapID].loadMapImage")"@mrbungle64 sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
Falls die o.g. Datenpunkte nicht vorhanden sind kann man diese über die folgende Einstellung aktivieren:
"Funktion zum Laden einer statischen Map ("map.[mapID].loadMapImage")"leider werden die Datenpunkte bei mir nicht angezeigt, egal ob die Einstellung aktiviere oder nicht. In der App sind die Karten im Reinigungsprotokoll vorhanden.
-
@mrbungle64 sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
Falls die o.g. Datenpunkte nicht vorhanden sind kann man diese über die folgende Einstellung aktivieren:
"Funktion zum Laden einer statischen Map ("map.[mapID].loadMapImage")"leider werden die Datenpunkte bei mir nicht angezeigt, egal ob die Einstellung aktiviere oder nicht. In der App sind die Karten im Reinigungsprotokoll vorhanden.
@broady sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
@mrbungle64 sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
Falls die o.g. Datenpunkte nicht vorhanden sind kann man diese über die folgende Einstellung aktivieren:
"Funktion zum Laden einer statischen Map ("map.[mapID].loadMapImage")"leider werden die Datenpunkte bei mir nicht angezeigt, egal ob die Einstellung aktiviere oder nicht. In der App sind die Karten im Reinigungsprotokoll vorhanden.
Welches Modell ist das?
Bitte auch mal den Wert vom Datenpunkt "info.deviceClass" nachschauen und hier posten. -
@broady sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
@mrbungle64 sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
Falls die o.g. Datenpunkte nicht vorhanden sind kann man diese über die folgende Einstellung aktivieren:
"Funktion zum Laden einer statischen Map ("map.[mapID].loadMapImage")"leider werden die Datenpunkte bei mir nicht angezeigt, egal ob die Einstellung aktiviere oder nicht. In der App sind die Karten im Reinigungsprotokoll vorhanden.
Welches Modell ist das?
Bitte auch mal den Wert vom Datenpunkt "info.deviceClass" nachschauen und hier posten. -
@mrbungle64 Das Modell ist der DEEBOT OZMO 905. In "info.deviceClass" steht "2pv572".
@broady sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
@mrbungle64 Das Modell ist der DEEBOT OZMO 905. In "info.deviceClass" steht "2pv572".
Für das Modell hatte aus irgendwelchen Gründen die Konfig gefehlt. Ich habe die nun eingefügt.
Wenn Du möchtest kannst du mal die Alpha von GitHub installieren - damit sollte nun insgesamt einiges mehr an Datenpunkten da sein. -
@broady sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
@mrbungle64 Das Modell ist der DEEBOT OZMO 905. In "info.deviceClass" steht "2pv572".
Für das Modell hatte aus irgendwelchen Gründen die Konfig gefehlt. Ich habe die nun eingefügt.
Wenn Du möchtest kannst du mal die Alpha von GitHub installieren - damit sollte nun insgesamt einiges mehr an Datenpunkten da sein.@mrbungle64 Danke, das hat erstmal geklappt. Datenpunkte und Karten sind jetzt vorhanden. Bekomme allerdings im Log die folgenden Fehlermeldungen:
ecovacs-deebot.0 2023-01-30 18:19:11.684 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:19:11.670 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:19:11.658 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:19:11.626 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:18:17.596 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:18:17.579 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:18:17.572 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:18:17.563 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). -
@mrbungle64 Danke, das hat erstmal geklappt. Datenpunkte und Karten sind jetzt vorhanden. Bekomme allerdings im Log die folgenden Fehlermeldungen:
ecovacs-deebot.0 2023-01-30 18:19:11.684 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:19:11.670 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:19:11.658 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:19:11.626 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:18:17.596 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:18:17.579 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:18:17.572 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`). ecovacs-deebot.0 2023-01-30 18:18:17.563 warn Error message received: The module '/opt/iobroker/node_modules/canvas/build/Release/canvas.node'was compiled against a different Node.js version usingNODE_MODULE_VERSION 108. This version of Node.js requiresNODE_MODULE_VERSION 93. Please try re-compiling or re-installingthe module (for instance, using `npm rebuild` or `npm install`).@broady sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
Danke, das hat erstmal geklappt. Datenpunkte und Karten sind jetzt vorhanden. Bekomme allerdings im Log die folgenden Fehlermeldungen:
https://github.com/mrbungle64/ioBroker.ecovacs-deebot/wiki/FAQ#nodejs-upgrade
-
@broady sagte in Ecovacs Deebot Adapter: Informationen und Praxistipps:
Danke, das hat erstmal geklappt. Datenpunkte und Karten sind jetzt vorhanden. Bekomme allerdings im Log die folgenden Fehlermeldungen:
https://github.com/mrbungle64/ioBroker.ecovacs-deebot/wiki/FAQ#nodejs-upgrade
@mrbungle64 Danke, das hat geklappt.
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
418
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge