

Wasserzähler - Selfmade
-
@jomjol leider dasselbe.
2019-11-27T21:24:05.838258179Z Start CutImage, AnalogReadout, DigitalReadout, 2019-11-27T21:24:05.838368529Z ----------------------------------------, 2019-11-27T21:24:05.838385920Z Exception happened during processing of request from ('192.168.1.82', 49439), 2019-11-27T21:24:05.838400796Z Traceback (most recent call last):, 2019-11-27T21:24:05.838415113Z File "/usr/local/lib/python3.7/socketserver.py", line 316, in _handle_request_noblock, 2019-11-27T21:24:05.838429780Z self.process_request(request, client_address), 2019-11-27T21:24:05.838443958Z File "/usr/local/lib/python3.7/socketserver.py", line 347, in process_request, 2019-11-27T21:24:05.838458625Z self.finish_request(request, client_address), 2019-11-27T21:24:05.838472803Z File "/usr/local/lib/python3.7/socketserver.py", line 360, in finish_request, 2019-11-27T21:24:05.838487400Z self.RequestHandlerClass(request, client_address, self), 2019-11-27T21:24:05.838501508Z File "/usr/local/lib/python3.7/socketserver.py", line 720, in __init__, 2019-11-27T21:24:05.838516035Z self.handle(), 2019-11-27T21:24:05.838530003Z File "/usr/local/lib/python3.7/http/server.py", line 426, in handle, 2019-11-27T21:24:05.838544320Z self.handle_one_request(), 2019-11-27T21:24:05.838558428Z File "/usr/local/lib/python3.7/http/server.py", line 414, in handle_one_request, 2019-11-27T21:24:05.838572956Z method(), 2019-11-27T21:24:05.838586924Z File "./wasseruhr.py", line 74, in do_GET, 2019-11-27T21:24:05.838601381Z result = wasserzaehler.getZaehlerstand(url, simple, usePrevalue, single), 2019-11-27T21:24:05.838615559Z File "/lib/ZaehlerstandClass.py", line 82, in getZaehlerstand, 2019-11-27T21:24:05.838630016Z resultdigital = self.readDigitalDigit.Readout(resultcut[1], logtime), 2019-11-27T21:24:05.838644334Z File "/lib/ReadDigitalDigitClass.py", line 77, in Readout, 2019-11-27T21:24:05.838658651Z self.saveLogImage(image, value, logtime), 2019-11-27T21:24:05.838672829Z File "/lib/ReadDigitalDigitClass.py", line 101, in saveLogImage, 2019-11-27T21:24:05.838687007Z cv2.imwrite(speichername, image[1]), 2019-11-27T21:24:05.838701115Z TypeError: Expected Ptr<cv::UMat> for argument '%s', 2019-11-27T21:24:05.838715572Z ----------------------------------------, 2019-11-27T21:24:10.786941317Z Premature end of JPEG file,@watcherkb Bekommst du von deiner ESP32-CAM direkt den ein Bild? Und hast du in der Config.ini den richtigen Link zu deiner ESP32-Cam eingestellt.
Sieht so aus, als ob der Server kein Bild bekommt, welches er verarbeiten soll.
-
@watcherkb Bekommst du von deiner ESP32-CAM direkt den ein Bild? Und hast du in der Config.ini den richtigen Link zu deiner ESP32-Cam eingestellt.
Sieht so aus, als ob der Server kein Bild bekommt, welches er verarbeiten soll.
@jomjol ja die Bilder werden erzeugt.
http://192.168.1.36:3000/wasserzaehler.html --> geht nicht (LED leuchtet auf)
http://192.168.1.36:3000/wasserzaehler.html&full --> geht nicht (LED leuchtet auf)
http://192.168.1.36:3000/roi.html --> geht
http://192.168.1.209/capture_with_flashlight?quality=18&size=XGA --> geht (das steht auch so in der ini)Ich nutze den rolling-Stand.
EDIT: hab mir gerade das latest gepullt. Damit geht es. Kann es sein dass in der Datei ReadDigitalDigitClass.py die letzte Zeile nicht stimmt? Ich glaube an der Stelle müsste es anders aussehen:
Ist: cv2.imwrite(speichername, image[1]) Soll: image[1].save(speichername, "JPEG") -
@Knallochse Eigentlich sollte die Plausibilisierungsprüfung das Springen um mehrere zehntausend Liter verhindern. Ich habe dazu weiter oben etwas gepostet (18. Nov. 2019). Da war ein Fehler in einem der Python Files, der die Plausibilisierung verhindert hat.
-
@Knallochse Eigentlich sollte die Plausibilisierungsprüfung das Springen um mehrere zehntausend Liter verhindern. Ich habe dazu weiter oben etwas gepostet (18. Nov. 2019). Da war ein Fehler in einem der Python Files, der die Plausibilisierung verhindert hat.
@pfried Danke dir für den Hinweiß.
 Scheint behoben zu sein. Ich warte mal bis zum nächsten Wechsel der Digitalzahl ob die Plausibilisierungsprüfung richtig greift.
Scheint behoben zu sein. Ich warte mal bis zum nächsten Wechsel der Digitalzahl ob die Plausibilisierungsprüfung richtig greift. -
@jomjol ja die Bilder werden erzeugt.
http://192.168.1.36:3000/wasserzaehler.html --> geht nicht (LED leuchtet auf)
http://192.168.1.36:3000/wasserzaehler.html&full --> geht nicht (LED leuchtet auf)
http://192.168.1.36:3000/roi.html --> geht
http://192.168.1.209/capture_with_flashlight?quality=18&size=XGA --> geht (das steht auch so in der ini)Ich nutze den rolling-Stand.
EDIT: hab mir gerade das latest gepullt. Damit geht es. Kann es sein dass in der Datei ReadDigitalDigitClass.py die letzte Zeile nicht stimmt? Ich glaube an der Stelle müsste es anders aussehen:
Ist: cv2.imwrite(speichername, image[1]) Soll: image[1].save(speichername, "JPEG")@watcherkb Du hast völlig recht mit dem Fehler in der der ReadDigitalDigitClass.py.
Mich wundert nur, dass mein rolling lief

Die Docker Rolling Version ist upgedated, Code wird korrigiert, probiere es bei Gelegenheit bitte nochmal ...
-
Hallo, Ihr Wissenden hier. Ich muss mich leider als DAU outen und einmal die Frage loswerden: Wie komme ich in dem Dockercontainer (Docker ist Neuland für mich, läuft bei mir als Container unter Promox. Die ESP-Cam läuft, ist scharf gestellt und liefert ein brauchbares Bild.

Mit http://server-ip:3000/wasserzaehler.html?url=http://picture-server/image.jpg&full gibt es schon mal eine Ausgabe, natürlich nur wirres Zeug.) an die config.ini? Ich habe mit Putty versucht an die Datei zu kommen, zuletzt mit Filezilla gesucht und bin jetzt leider nahe dran, die Nerven zu verlieren. Ein Fingerzeig, wie man an die Datei kommt, würde mir schon helfen.
Dank im Voraus
Ralf -
Hallo, Ihr Wissenden hier. Ich muss mich leider als DAU outen und einmal die Frage loswerden: Wie komme ich in dem Dockercontainer (Docker ist Neuland für mich, läuft bei mir als Container unter Promox. Die ESP-Cam läuft, ist scharf gestellt und liefert ein brauchbares Bild.
Mit http://server-ip:3000/wasserzaehler.html?url=http://picture-server/image.jpg&full gibt es schon mal eine Ausgabe, natürlich nur wirres Zeug.) an die config.ini? Ich habe mit Putty versucht an die Datei zu kommen, zuletzt mit Filezilla gesucht und bin jetzt leider nahe dran, die Nerven zu verlieren. Ein Fingerzeig, wie man an die Datei kommt, würde mir schon helfen.
Dank im Voraus
Ralf@Radi Hallo Radi, erstmal Glückwunsch zu einem laufenden System.
Wenn du ca. 2 Seiten hoch scrollst findest du eine erste Antwort:
jomjol 27. Nov. 2019, 19:32
"@watcherkb" Du musst zwei Verzeichnisse anlegen, von dem du das eine auf das Docker interne Verzeichnis "config" und das andere auf das Verzeichnis "log" mountest.
Das sollte folgendermaßen funktionieren:docker run -p 3000:3000 --mount type=bind,source=/volume/configpath,target=/config --mount type=bind,source=/volume/logpath,target=/logwobei der erste source-path auf dein Verzeichnis für die Config-Dateien und der zweite auf das log-Verzeichniss zeigt.
Theoretisch sollte beim ersten Start jeweils eine Default config angelegt werden. Alternativ kannst du das externe config-Verzeichnis auch mit den Files von GitHub befüllen.
Anschließend kannst du alles auf dem exteren Config-Verzeichnis beabeiten. Der Docker-Container verwendet dann diese Dateien.Melde dich, wenn du weiteren Input brauchst.
Gruß,
jomjol -
@Radi Hallo Radi, erstmal Glückwunsch zu einem laufenden System.
Wenn du ca. 2 Seiten hoch scrollst findest du eine erste Antwort:
jomjol 27. Nov. 2019, 19:32
"@watcherkb" Du musst zwei Verzeichnisse anlegen, von dem du das eine auf das Docker interne Verzeichnis "config" und das andere auf das Verzeichnis "log" mountest.
Das sollte folgendermaßen funktionieren:docker run -p 3000:3000 --mount type=bind,source=/volume/configpath,target=/config --mount type=bind,source=/volume/logpath,target=/logwobei der erste source-path auf dein Verzeichnis für die Config-Dateien und der zweite auf das log-Verzeichniss zeigt.
Theoretisch sollte beim ersten Start jeweils eine Default config angelegt werden. Alternativ kannst du das externe config-Verzeichnis auch mit den Files von GitHub befüllen.
Anschließend kannst du alles auf dem exteren Config-Verzeichnis beabeiten. Der Docker-Container verwendet dann diese Dateien.Melde dich, wenn du weiteren Input brauchst.
Gruß,
jomjol@jomjol Hallo Jomjol, erst einmal viele Dank und meinen Respekt für deine Arbeit an diesem Projekt.
Das mit dem Binding der Sourcen habe ich zwar gelesen, aber nicht als Lösung für mein Problem angesehen. Habe gerade verzweifelt versucht, die .ini im Container zu editieren, nachdem ich herausgefunden habe wie ich im Docker dahin komme.
Werde den von dir empfohlenen Weg ersteinmal weiterverfolgen, auch wenn die Pfadzuweisungen bei mir garantiert erst einmal wieder einen Schwung graue Haare erzeugen wird.
Du hast garantiert genug andere Sachen um die Ohren, als mir die Grundlagen von Docker zu erklären.
Wenn ich gar nicht mehr weiter komme, melde ich mich noch mal.Einen angenehmen Ersten Advent wünscht
Ralf -
@jomjol Hast Du schon einen Lösung für den RB3 gefunden? Ich bin am Ende meines Wissens (was nicht sehr schwer ist)
Liebe Grüße
Paul@pfried Hallo Paul,
Timing hätte besser nicht sein können
Ich konnte zwar noch immer keine Installation auf dem Raspberry hinbekommen ... ABER:Seit 1 Stunde gibt es ein Docker-Image, welches auf dem Docker meines Raspberry B3 ohne Probleme läuft!
Hier findest du den Download:
jomjol/wasserzaehler:raspi-rollingIch bin super gespannt, ob das auch bei dir läuft!
Beste Grüße,
jomjol -
zu Beginn erstmal ein Danke an Jomjol für die Arbeit.
Ich hab das Projekt heute gerade gefunden und wühle mich durch diesen riesigen Thread.
Da ich wie der eine oder andere direkt über ein paar Grundlagen gestolpert bin, hier ein paar Links zum Thema
ESP32 - Arduino IDE für Laien oder Anfänger.
Auf den beiden Seiten werden die Grundlagen, wie ich finde recht einfach erklärt und dargestellt.Ich hoffe dem einen oder anderen hilft es.
-
Hallo so, hardware instaliert ,dauerte etwas durch krankenhausaufenthalt......
habe ein keinesProblem ,anbei das bild was im source liegt und bild von Roi
 image url))
image url))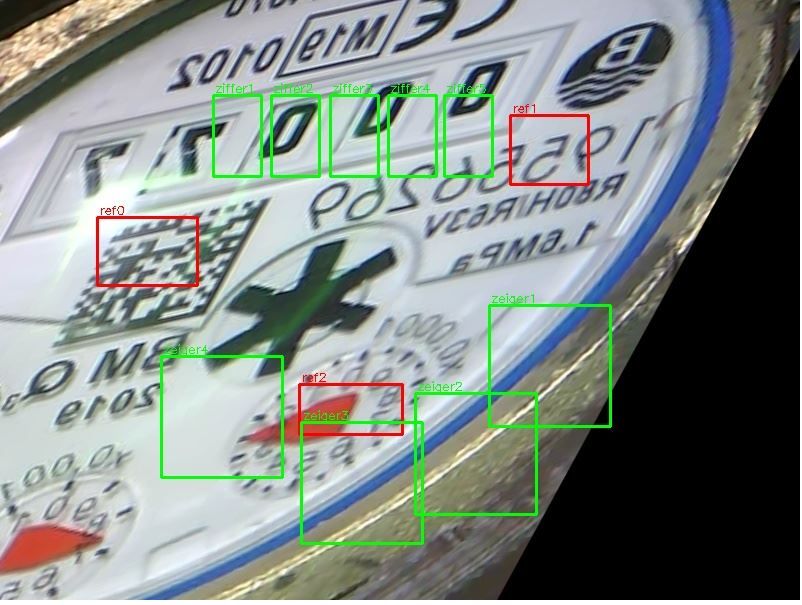
habe ich was übsehen zumeinstellen ??mfg
mikewolf@Mikewolf Hallo Mike,
was hast du letztendlich gemach, um das Bild richtig hinzustellen? Bei mir sieht das ROI ähnlich wie bei dir aus (verzerrt und gespiegelt)
Habe keine Vorstellung, wo ich jetzt ansetzen soll. Kamera drehen oder gibt es noch Einstellmöglichkeiten in der config.ini?
Grüße
Ralf -
@Mikewolf Hallo Mike,
was hast du letztendlich gemach, um das Bild richtig hinzustellen? Bei mir sieht das ROI ähnlich wie bei dir aus (verzerrt und gespiegelt)
Habe keine Vorstellung, wo ich jetzt ansetzen soll. Kamera drehen oder gibt es noch Einstellmöglichkeiten in der config.ini?
Grüße
Ralf -
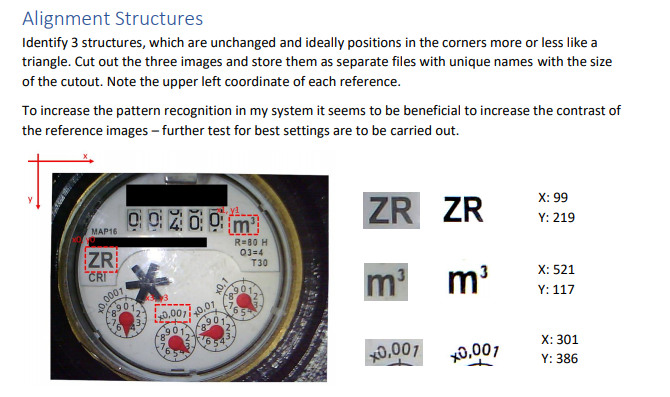
@Radi Hallo Radi, du musst die Referenzen und Config.ini wie folgt anpassen:
@jomjol Hallo,
die Alignment Procedure habe ich gelesen, aber nichts gefunden, wie ich das gespiegelte Bild wieder richtig herum bekomme. Der Parameter "initial_rotation_angle" dreht das Bild nur um den Mittelpunkt, oder? Der Snapshot der Kamera ist ja richtig herum, nur um einige Grad verdreht (siehe meinen Beitrag vom 30.11.) Habe ich etwas übersehen?Gruß
Ralf -
@jomjol Hallo,
die Alignment Procedure habe ich gelesen, aber nichts gefunden, wie ich das gespiegelte Bild wieder richtig herum bekomme. Der Parameter "initial_rotation_angle" dreht das Bild nur um den Mittelpunkt, oder? Der Snapshot der Kamera ist ja richtig herum, nur um einige Grad verdreht (siehe meinen Beitrag vom 30.11.) Habe ich etwas übersehen?Gruß
Ralf@Radi
Hiermit rotierst du das Bild
[alignment]
initial_rotation_angle=180Du musst dir aber für deinen Zähler die 3 markierten Bereiche aus deinem Zähler rauspicken und genauso konfigurieren. Jeder Zähler sieht anders aus. Deswegen musst du deine 3 Bereiche rauspicken, per Bildbearbeitung ausschneiden, speichern und die Position x,y in die ini eintragen. Damit erkennt das Programm deinen Zähler und diese Bereiche und rotiert das Bild entsprechend (solltest du irgendwann mal deine Camera verdreht haben musst du nichts mehr an der ini ändern). Also einmal Seite 2 durchgehen und bei dir anwenden.
-
@watcherkb Du hast völlig recht mit dem Fehler in der der ReadDigitalDigitClass.py.
Mich wundert nur, dass mein rolling lief
Die Docker Rolling Version ist upgedated, Code wird korrigiert, probiere es bei Gelegenheit bitte nochmal ...
@jomjol sagte in Wasserzähler - Selfmade:
@watcherkb Du hast völlig recht mit dem Fehler in der der ReadDigitalDigitClass.py.
Mich wundert nur, dass mein rolling lief
Die Docker Rolling Version ist upgedated, Code wird korrigiert, probiere es bei Gelegenheit bitte nochmal ...
hey, sorry komme aktuell nicht dazu deine Änderung zu testen. Werde es bei Gelegenheit machen und dir berichten.
-
@Radi
Hiermit rotierst du das Bild
[alignment]
initial_rotation_angle=180Du musst dir aber für deinen Zähler die 3 markierten Bereiche aus deinem Zähler rauspicken und genauso konfigurieren. Jeder Zähler sieht anders aus. Deswegen musst du deine 3 Bereiche rauspicken, per Bildbearbeitung ausschneiden, speichern und die Position x,y in die ini eintragen. Damit erkennt das Programm deinen Zähler und diese Bereiche und rotiert das Bild entsprechend (solltest du irgendwann mal deine Camera verdreht haben musst du nichts mehr an der ini ändern). Also einmal Seite 2 durchgehen und bei dir anwenden.
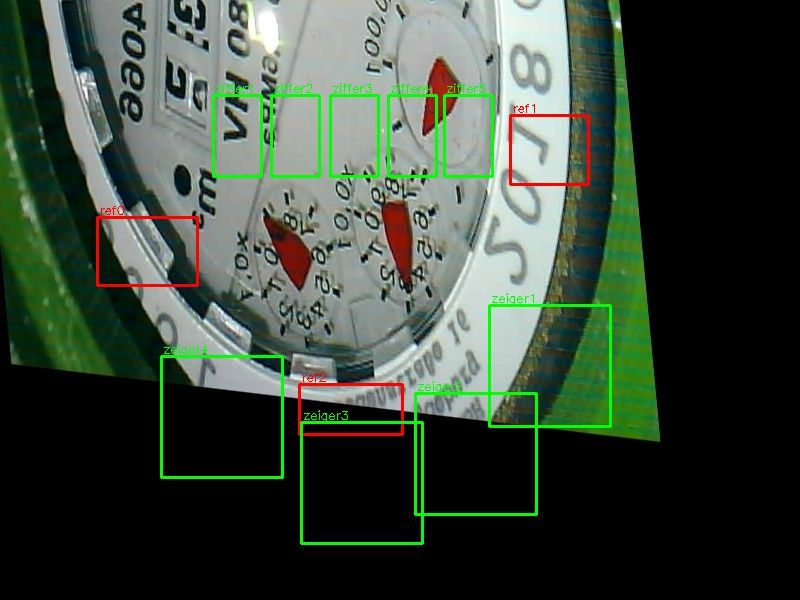
@watcherkb Das habe ich soweit, glaube ich zumindest, verstanden. In meinem Post vom 30.11. habe ich ein Bild angehängt, das zeigt, wie das Kamerabild momentan aussieht. Habe gestern die Pfadzuweisung für die config.ini und das Logverzeichnis hinbekommen. Daraufhin mit dem initial_rotation_angle ein wenig geübt, aber kein vernünftiges Bild im ROI hinbekommen.
Ich verstehe nicht, wieso das Bild im ROI gespiegelt ist und wie ich es normal bekomme.
Ich glaube nicht das eine einfache Drehung reicht. Der User mikewolf hatte eine ähnliche Ausgangssituation , deshalb hatte ich die heutige Frage an ihn gestellt, bin natürlich für jede andere Unterstützung dankbar.Grüße
Ralf -
@Radi
Hiermit rotierst du das Bild
[alignment]
initial_rotation_angle=180Du musst dir aber für deinen Zähler die 3 markierten Bereiche aus deinem Zähler rauspicken und genauso konfigurieren. Jeder Zähler sieht anders aus. Deswegen musst du deine 3 Bereiche rauspicken, per Bildbearbeitung ausschneiden, speichern und die Position x,y in die ini eintragen. Damit erkennt das Programm deinen Zähler und diese Bereiche und rotiert das Bild entsprechend (solltest du irgendwann mal deine Camera verdreht haben musst du nichts mehr an der ini ändern). Also einmal Seite 2 durchgehen und bei dir anwenden.
@watcherkb Tschuldigung, ist wohl heute doch nicht der Tag, wo das mit dem Lesen klappt. Dein letzter an mich gerichtete Satz war es wohl, der mir die richtige Richtung gibt . Hatte mich nur auf der ersten Seite festgebissen und die wichtigen Sachen übersehen oder besser noch gar nicht gelesen. Gelobe Besserung und werde das heute Abend mal ausprobieren.
Ralf -
Ich habe heute mal die Wasseruhr freigeräumt und mit Erschrecken festgestellt, dass meine eine völlig andere Uhr ist, als die, welche hier immer auf allen Bildern zu sehen ist.
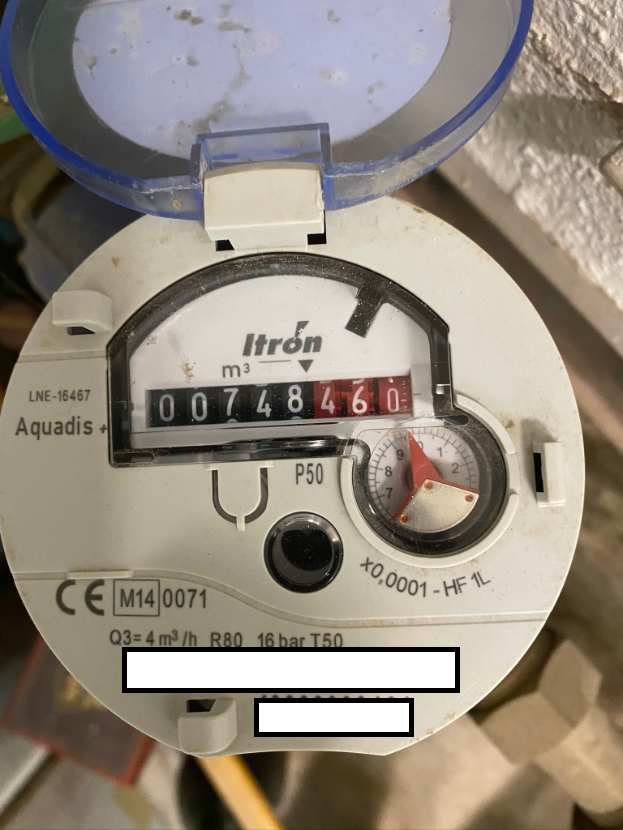
funktioniert das Ganze auch mit einer solchen Wasseruhr? oder bin ich der einzige hier, der einen solchen Exoten im Keller hängen hat?
Gruss
Silvio
{kind=link}
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
439
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge