

Announce: Vorwerk VR200 Saugroboter Adapter
-
Hallo Eisbaeeer,
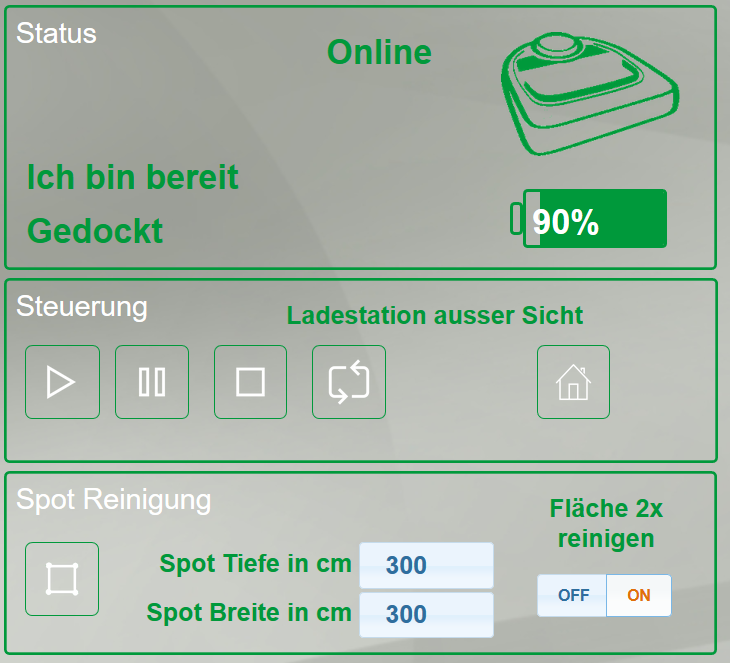
habe gerade Dein VR200-template geladen und in VIS importiert
Anschließend habe die Befehle auf den Namen "Erna" geändert. Ich kann nun Start, Stop und Pause ausführen und der Robi reagiert. Auch die Akkukapazität, Status, Fehler wird mir angezeigt.Leider reagiert der Rest überhaupt nicht "Spot, Eco usw."
Kann mir hier jemand weiterhelfen, da ich in iobroker noch kompletter Anfänger bin.
Danke und Grüße,
Andreas
-
@FischerICT @Holly76
Also die Bilder kannst du nach belieben im VIS Bilder Ordner ablegen (hochladen). Dann in VIS die entsprechenden Buttons anklicken und dein hochgeladenes Bild zuordnen.@FischerICT
Das ist doch schon mal ein Schritt.
Spot, Eco, Home usw. reagiert nur, wenn der VR200 auch den Befehl ausführen kann. Alle bedienbaren Funktionen sind grün hinterlegt. Was "false" ist, geht auch nicht. Schau mal in den Datenpunkten nach.
Das liegt dann z.B. an folgendem:-
VR200 hat seine Basis noch nicht gesehen --> dann geht auch "Home" nicht.
-
VR200 ist nicht auf Stop --> dann geht auch Spot nicht
-
Eco muss zuerst angewählt werden, bevor der VR200 mit Play gestartet wurde. Während der Reinigung wechselt er nicht mehr auf Eco oder Normal. Man muss also vor dem Start Eco anwählen. Bitte auch die README.md dazu lesen, da steht dieser Sachverhalt beschrieben.
Grundsätzlich kannst du davon ausgehen, dass der Adapter voll funktioniert, wenn der VR200 reagiert. Der VR200 hat ein paar Besonderheiten bezüglich "Basis anfahren" usw. Meiner sieht erst nach einer ganzen Weile seine Basis, obwohl er schon ein paar mal daran vorbeigefahren ist.
Spot funktioniert, wenn er auf Stop steht. Dann Spot Reinigung auswählen und dann auf Start. Du kannst noch die Spot Fläche in cm angeben. Standard ist 100cm X 100cm.
Auszug aus der README.md:
Examples
clean in eco mode
check if status.canStart is true
set commands.eco to true
set commands.clean to trueclean a 150cm * 150cm spot
place the VR200 in front of the desired location
check if status.canStart is true
set commands.spotHeight and commands.spotWidth to 150
set commands.cleanSpot to truereturn to base
status.dockHasBeenSeen has to be true
VR200 has to be in paused or stopped state (commands.stop / commands.pause)
set commands.goToBase to trueGrüße Eisbaeeer
-
-
@Flexer sagte in Announce: Vorwerk VR200 Saugroboter Adapter:
Kurze Frage. Funktioniert der Adapter denn auch mit dem VR 300?
Hallo Flexer,
der Adapter funktioniert auch mit dem VR300
Gruß
Andreas -
Hallo Eisbär würdest du dein Neato Vis veröffentlichen ?
Grüße Alex -
Hallo Eisbär würdest du dein Neato Vis veröffentlichen ?
Grüße Alex -
ja das habe ich gefunden allerdings kann ich den neato nicht korrekt steuern habe mal in der Befehlsliste vom Neato Adapter geschaut die meisten Befehle werden auch mit True gesetzt aber irgendwie klappt es nicht vllt. verhält sich der neato doch anders als der VR200
-
ja das habe ich gefunden allerdings kann ich den neato nicht korrekt steuern habe mal in der Befehlsliste vom Neato Adapter geschaut die meisten Befehle werden auch mit True gesetzt aber irgendwie klappt es nicht vllt. verhält sich der neato doch anders als der VR200
@Alexxx2005 Hi. Ähhm, ja? Was genau versuchst du? Mit der VIS vom VR200 auf die Neato Datenpunkte zugreifen? Oder wolltest du den VR200 Adapter für Neato nutzen?
Eigentlich sind die beiden Geräte identisch, zumindest was die Ansteuerung angeht. Aber der Adapter vom VR200 nutzt ein anderes Zertifikat für die Kommunikation zur Cloud. Für Neato funktioniert nur der Neato Adapter und vice versa.
Gruß Eisbaeeer -
@Eisbaeeer said in Announce: Vorwerk VR200 Saugroboter Adapter:
Hi. Ähhm, ja? Was genau versuchst du? Mit der VIS vom VR200 auf die Neato Datenpunkte zugreifen? Oder wolltest du den VR200 Adapter für Neato nutzen?
Eigentlich sind die beiden Geräte identisch, zumindest was die Ansteuerung angeht. Aber der Adapter vom VR200 nutzt ein anderes Zertifikat für die Kommunikation zur Cloud. Für Neato funktioniert nur der Neato Adapter und vice versa.
Gruß EisbaeeerHallo, ja ich nehme die VIS vom VR200 um auf die Neato Datenpunkte zuzugreifen. Im Prinzip heissen die Datenpunkte gleich wie beim VR200.
z.b. batteriestatus : botvac.0.Tubi.status.charge usw. so habe ich alles
geändert, ich kann ich starten , pause und stoppen aber zurück zur Station
funktioniert z.b. nicht der Turbo/Eco ebenfalls nicht. Der Rest habe ich noch
nicht geprüft, ich dachte die VIS wäre von Neato aber war VR200.
Grüße Alex -
@Eisbaeeer said in Announce: Vorwerk VR200 Saugroboter Adapter:
Hi. Ähhm, ja? Was genau versuchst du? Mit der VIS vom VR200 auf die Neato Datenpunkte zugreifen? Oder wolltest du den VR200 Adapter für Neato nutzen?
Eigentlich sind die beiden Geräte identisch, zumindest was die Ansteuerung angeht. Aber der Adapter vom VR200 nutzt ein anderes Zertifikat für die Kommunikation zur Cloud. Für Neato funktioniert nur der Neato Adapter und vice versa.
Gruß EisbaeeerHallo, ja ich nehme die VIS vom VR200 um auf die Neato Datenpunkte zuzugreifen. Im Prinzip heissen die Datenpunkte gleich wie beim VR200.
z.b. batteriestatus : botvac.0.Tubi.status.charge usw. so habe ich alles
geändert, ich kann ich starten , pause und stoppen aber zurück zur Station
funktioniert z.b. nicht der Turbo/Eco ebenfalls nicht. Der Rest habe ich noch
nicht geprüft, ich dachte die VIS wäre von Neato aber war VR200.
Grüße Alex@Alexxx2005 sagte in Announce: Vorwerk VR200 Saugroboter Adapter:
Hallo, ja ich nehme die VIS vom VR200 um auf die Neato Datenpunkte zuzugreifen. Im Prinzip heissen die Datenpunkte gleich wie beim VR200.
z.b. batteriestatus : botvac.0.Tubi.status.charge usw. so habe ich alles
geändert, ich kann ich starten , pause und stoppen aber zurück zur Station
funktioniert z.b. nicht der Turbo/Eco ebenfalls nicht. Der Rest habe ich noch
nicht geprüft, ich dachte die VIS wäre von Neato aber war VR200.
Grüße AlexAh OK. Das sollte aber klappen. Denn die Datenpunkte sind wirklich identisch. Die Basis fährt der Robo aber erst an, wenn er sie auch gesehen hat. Solange der Status auf false ist, fährt er nicht zur Basis zurück. Eco geht nur vor dem Starten des Robos. Während er läuft, lässt sich nicht zwischen Eco und Turbo umschalten.
So wie sich mir das darstellt funktioniert alles so, wie es soll.
Gruß Eisbaeeer -
@Alexxx2005 sagte in Announce: Vorwerk VR200 Saugroboter Adapter:
Hallo, ja ich nehme die VIS vom VR200 um auf die Neato Datenpunkte zuzugreifen. Im Prinzip heissen die Datenpunkte gleich wie beim VR200.
z.b. batteriestatus : botvac.0.Tubi.status.charge usw. so habe ich alles
geändert, ich kann ich starten , pause und stoppen aber zurück zur Station
funktioniert z.b. nicht der Turbo/Eco ebenfalls nicht. Der Rest habe ich noch
nicht geprüft, ich dachte die VIS wäre von Neato aber war VR200.
Grüße AlexAh OK. Das sollte aber klappen. Denn die Datenpunkte sind wirklich identisch. Die Basis fährt der Robo aber erst an, wenn er sie auch gesehen hat. Solange der Status auf false ist, fährt er nicht zur Basis zurück. Eco geht nur vor dem Starten des Robos. Während er läuft, lässt sich nicht zwischen Eco und Turbo umschalten.
So wie sich mir das darstellt funktioniert alles so, wie es soll.
Gruß Eisbaeeer@Eisbaeeer ne sorry klappt leider nicht hab extra den Robi mal gedreht usw. er erkennt die station nicht und wenn ich eco drücke schaltet nichts von turbo auf eco um aber egal muss ja nicht alles ein zu eins umsetzen , ist dir bekannt ob man die MAP noch im VIS einblenden kann, so in den Objekten konnte ich nichts mit MAP oder ähnlichem erkennen. viele grüße alex
-
@Eisbaeeer ne sorry klappt leider nicht hab extra den Robi mal gedreht usw. er erkennt die station nicht und wenn ich eco drücke schaltet nichts von turbo auf eco um aber egal muss ja nicht alles ein zu eins umsetzen , ist dir bekannt ob man die MAP noch im VIS einblenden kann, so in den Objekten konnte ich nichts mit MAP oder ähnlichem erkennen. viele grüße alex
@Alexxx2005 Doch, doch. Das funktioniert schon alles. Hatten wir hier auch schon einige Male. Es ist so, wie es eben die App von Neato realisiert hat.
Return to Base geht nur, wenn du den Robo in Ruhe laufen lässt. Er muss seine Basis alleine finden. Erst dann geht der Status auf true!
Ebenso Eco. Du kannst Eco nicht während der Reinigung umschalten!
Siehe hierGruß
-
Sehr guter Adapter, alles funktioniert wie es soll über Vis. Nun möchte Ich Ihr mit Alexa die Kommandos zuwerfen.
Ich müsste jetzt Sagen "Robbi Start an" (clean=1, stop=0, gotobase=0) zum beginnen, zum stoppen "Robbi Start aus" und
"Robbi Stop an" (clean=0, stop=1, gotobase=0) und um Ihn zur Station zu schicken "Robbi Stop aus" und "GehNachHause an" (clean=0, stop=0, gotobase=1).Hab ich jetzt hier den totalen Denkfehler und sehe den Wald vor lauter Bäumen nicht

Wie habt Ihr das gelöst?,Gruß
-
Sehr guter Adapter, alles funktioniert wie es soll über Vis. Nun möchte Ich Ihr mit Alexa die Kommandos zuwerfen.
Ich müsste jetzt Sagen "Robbi Start an" (clean=1, stop=0, gotobase=0) zum beginnen, zum stoppen "Robbi Start aus" und
"Robbi Stop an" (clean=0, stop=1, gotobase=0) und um Ihn zur Station zu schicken "Robbi Stop aus" und "GehNachHause an" (clean=0, stop=0, gotobase=1).Hab ich jetzt hier den totalen Denkfehler und sehe den Wald vor lauter Bäumen nicht
Wie habt Ihr das gelöst?,Gruß
@SagIchMaSo Das könntest du mit dem Script Adapter lösen. Aber grundsätzlich hast du mal recht, dass man die Statis entsprechend setzen muss. In VIS muss ich auch erst auf Stop drücken, um ihn wieder zur Basis schicken zu können. Also schon mal zwei Befehle.
Ich könnte für solche Fälle noch ein paar Datenpunkte in den Adapter einbauen, die dann direkt die entsprechenden Schritte durchführen. Die Frage ist nur, wo man dann anfängt und wo man aufhört. Starten ist ja easy, da muss man nichts ändern. Da muss nur "clean" auf true gesetzt werden. Stoppen und zur Basis wäre dann ein neuer Datenpunkt.
Gruß Eisbaeeer -
@SagIchMaSo Das könntest du mit dem Script Adapter lösen. Aber grundsätzlich hast du mal recht, dass man die Statis entsprechend setzen muss. In VIS muss ich auch erst auf Stop drücken, um ihn wieder zur Basis schicken zu können. Also schon mal zwei Befehle.
Ich könnte für solche Fälle noch ein paar Datenpunkte in den Adapter einbauen, die dann direkt die entsprechenden Schritte durchführen. Die Frage ist nur, wo man dann anfängt und wo man aufhört. Starten ist ja easy, da muss man nichts ändern. Da muss nur "clean" auf true gesetzt werden. Stoppen und zur Basis wäre dann ein neuer Datenpunkt.
Gruß EisbaeeerIch komme aus der Visual Studio C#/VB ecke, wo kann ich hier bei IoBroker/Vis denn Scripte erstellen und wie? Vermute mal Java. Oder ich versuche zu helfen insoweit das möglich ist. Speziell für Alexa würden die 3 Datenpunkte (Start/Stop/ZurBasis) enorm hilfreich sein. Ich empfinde die Anbindung an Alexa als bedeutenden Mehrwert für IoBroker bzw. den Adapter.
Ich hab den original Skill auch probiert, keine Ahnung welche Drogen die Entwickler bei Vorwerk genommen haben aber deren Lösung ist um längen schlechter ;-)
Gruß
-
Das findest du im Iobroker auf der linken Seite unter Skripte,
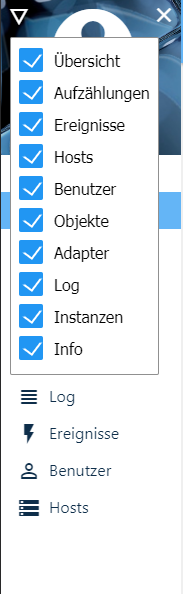
sollte es bei dir Skripte nicht anzeigen musst du auf den
oberen Pfeil klicken und skripte anklicken.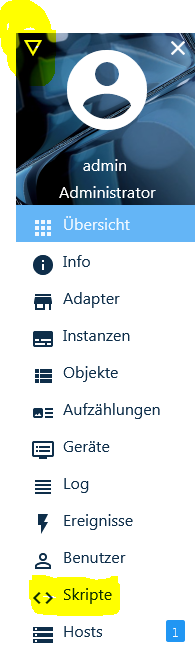
Grüße Alex
-
Das findest du im Iobroker auf der linken Seite unter Skripte,
sollte es bei dir Skripte nicht anzeigen musst du auf den
oberen Pfeil klicken und skripte anklicken.Grüße Alex
Danke.....aber :-)
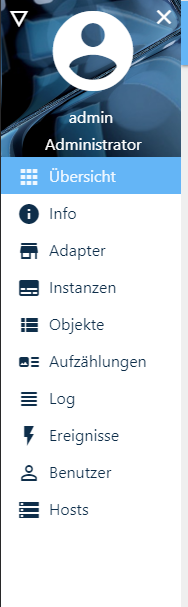
Muss ich das gesondert irgendwo aktivieren? Wird mir auch oben in dem Dropdown nicht angezeigt zur Auswahl.
-
Danke.....aber :-)
Muss ich das gesondert irgendwo aktivieren? Wird mir auch oben in dem Dropdown nicht angezeigt zur Auswahl.
-
@SagIchMaSo Du musst den Script-Adapter erst noch installieren, bzw eine Instanz hinzufügen.
Wenn es dann als Script funktioniert, kann ich dir das in den Adapter einbauen.
Gruß EisbaeeerSo also, ich hab da mal en bisschen was gebaut, der VR200 kann jetzt über Alexa gestartet, gestoppt und zur Basis geschickt werden. Befehle können in der Cloud ja nach Bedarf angepasst werden. Kreativer Beitrag meiner Frau für die Go Home Funktion: Robbi trete Heimweg <an> :-)
Das verteilen der Zustände läuft über ein Script.
Gruß
-
So also, ich hab da mal en bisschen was gebaut, der VR200 kann jetzt über Alexa gestartet, gestoppt und zur Basis geschickt werden. Befehle können in der Cloud ja nach Bedarf angepasst werden. Kreativer Beitrag meiner Frau für die Go Home Funktion: Robbi trete Heimweg <an> :-)
Das verteilen der Zustände läuft über ein Script.
Gruß
-
@SagIchMaSo Hi. Hast Du noch das Script? Dann Bau ich das beim nächsten Update mit ein.
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden423
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge