

Neuer Robonect HX Adapter
-
Ich habe aktuell das Problem , das mit der Beta 5 der Roby wieder unmoviviert zu Piepen anfängt (hatten wir ja schonmal , wenn die Infos abgefragt wurden…)
Dann wäre für mich noch ein Feature cool.... Die Duration des letzten Status wird ja momentan nur in Sekunden ausgegeben... Kann man das nicht gleich im Adapter in einen eigenen Datenpunkt als Zeitangabe übergeben ? Um das schön lesbar im VIS zu machen, muss man schon ein bisschen um die Ecke denken.. (ich kriegs auf jeden Fall nicht sauber hin ..)
-
Tatsächlich, mit setzen des Status "Job" fährt mein Mower los und mäht :-) . Im Status bei Robonect steht dann :

.Ich erwarte, dass er mäht, bis das Akku leer ist und dann zur Ladestation zurück fährt und auf den nächsten Timer wartet. Mehr bräuchte ich nicht und direkt in der GUI von Robonect kann ich das nicht auslösen :-)
[edit] . Klappt leider doch nicht so ganz. Der Mower hat einige Minuten gemäht und ist dann wieder in die Ladestation zurückgefahren. Offensichtlich muss man bei Job doch noch mehr Parameter mitgeben.
[edit 2 ] es gibt doch die Möglichkeit einen Mähauftrag "Job" auch in der Robonect GUI auszuführen, hatte ich bisher übersehen.
-
Der Robbi fährt über den Status JOB für die vorher eingestellte Zeit los. Vorkonfiguriert ist eine Stunde.
Wie schon erwähnt geht es leider nicht den Status in die Iobroker Cloud einzubinden. Wenn man den Status versucht einzubinden erscheint die Meldung
"Wird nicht unterstützt".
-
Auch wenn ich es eigentlich nicht benötige, habe ich mal kurz meinen Mower per Alexa gesteuert.
Allerdings benutze ich ausschließlich für die Alexasteuerung Note-Red und keine Cloud.
Ein bisschen holprig aber es funktioniert:
Befehle:
0 = "Auto",
1 = "Manuell",
2 = "Home",
98 = "End of day",
99 = "Job"
note-red:

Alexa, setzte Rasen auf 99
Mower fährt für eine Stunde mähen "Job"
Alexa , setzte Rasen auf 98
Mower macht Feierabend und fährt in die Ladestation
VG Uwe
-
@HAL:Auch wenn ich es eigentlich nicht benötige, habe ich mal kurz meinen Mower per Alexa gesteuert.
Allerdings benutze ich ausschließlich für die Alexasteuerung Note-Red und keine Cloud.
Ein bisschen holprig aber es funktioniert: `
Könntest du mir sagen wie das mit Note-Red funktioniert ohne Cloud?
-
Schau Dir bitte diesen Thread an, da steht alles drin:
-
Hat sich erledigt. Der Hersteller der Robonect Module für den RI40 hat ein Alexa Skill gebastelt. Es funktioniert damit perfekt.
https://www.amazon.de/Michael-Eckel-Rob … B072PXYSQ9
Unterstützte Befehle:
-
"Alexa, starte Mähroboter" oder "Alexa, frage Mähroboter nach dem Status" fragt den aktuellen Status ab
-
"Alexa, sage Mähroboter dass er den Modus auf Auto/Manuell/Home/Feierabend setzen soll" setzt den Modus auf Auto/Manuell/Home/Feierabend
-
"Alexa, sage Mähroboter dass er Feierabend machen soll" setzt den Modus auf Feierabend
-
"Alexa, sage Mähroboter dass er mähen soll" setzt einen Mähauftrag und macht anschließend Feierabend
-
"Alexa, frage Mähroboter nach Hilfe" schickt eine Liste der Befehle auf die Alexa App
Es funktioniert auch der Befehl : "Alexa, sage Mähroboter mähen."
Viel Spass
-
-
Hier ist noch das Log das ab und zu erscheint:
robonect.0 2018-06-30 10:51:00.409 error Error: read ECONNRESET -
Funktioniert der Adapter mit der neuen 1.0 beta6a ?
Ich habe es jetzt mal über ioBroker versucht und erhalte Fehler im Log.
! ````
host.ubuntu-hd 2018-07-26 19:01:09.940 info Restart adapter system.adapter.robonect.0 because enabled
host.ubuntu-hd 2018-07-26 19:01:09.940 error instance system.adapter.robonect.0 terminated with code 0 (OK)
host.ubuntu-hd 2018-07-26 19:01:09.940 error Caught by controller[0]: at emitNone (events.js:91:20)
host.ubuntu-hd 2018-07-26 19:01:09.940 error Caught by controller[0]: at IncomingMessage.g (events.js:292:16)
host.ubuntu-hd 2018-07-26 19:01:09.940 error Caught by controller[0]: at IncomingMessage. <anonymous>(/opt/iobroker/node_modules/request/request.js:1085:12)
host.ubuntu-hd 2018-07-26 19:01:09.940 error Caught by controller[0]: at Request.emit (events.js:188:7)
host.ubuntu-hd 2018-07-26 19:01:09.939 error Caught by controller[0]: at emitOne (events.js:96:13)
host.ubuntu-hd 2018-07-26 19:01:09.939 error Caught by controller[0]: at Request. <anonymous>(/opt/iobroker/node_modules/request/request.js:1163:10)
host.ubuntu-hd 2018-07-26 19:01:09.939 error Caught by controller[0]: at Request.emit (events.js:191:7)
host.ubuntu-hd 2018-07-26 19:01:09.939 error Caught by controller[0]: at emitTwo (events.js:106:13)
host.ubuntu-hd 2018-07-26 19:01:09.939 error Caught by controller[0]: at Request.self.callback (/opt/iobroker/node_modules/request/request.js:186:22)
host.ubuntu-hd 2018-07-26 19:01:09.939 error Caught by controller[0]: at Request._callback (/opt/iobroker/node_modules/iobroker.robonect/lib/robonect.js:4182:86)
host.ubuntu-hd 2018-07-26 19:01:09.938 error Caught by controller[0]: TypeError: Cannot read property 'enable' of undefined
robonect.0 2018-07-26 19:01:09.907 info cleaned everything up...
robonect.0 2018-07-26 19:01:09.907 error TypeError: Cannot read property 'enable' of undefined at Request._callback (/opt/iobroker/node_modules/iobroker.robonect/lib/robonect.js:4182:86) at Request.self.callback (/opt/iobroker/node_m
robonect.0 2018-07-26 19:01:09.906 error uncaught exception: Cannot read property 'enable' of undefined
robonect.0 2018-07-26 19:01:06.832 info Polling done (Initial)
robonect.0 2018-07-26 19:01:06.830 info Done
robonect.0 2018-07-26 19:01:06.829 info starting. Version 0.0.4 in /opt/iobroker/node_modules/iobroker.robonect, node: v6.14.3
host.ubuntu-hd 2018-07-26 19:01:05.145 info instance system.adapter.robonect.0 started with pid 1332
host.ubuntu-hd 2018-07-26 19:00:35.130 info Restart adapter system.adapter.robonect.0 because enabled
host.ubuntu-hd 2018-07-26 19:00:35.130 error instance system.adapter.robonect.0 terminated with code 0 (OK)
host.ubuntu-hd 2018-07-26 19:00:35.130 error Caught by controller[0]: at emitNone (events.js:91:20)
host.ubuntu-hd 2018-07-26 19:00:35.130 error Caught by controller[0]: at IncomingMessage.g (events.js:292:16)
host.ubuntu-hd 2018-07-26 19:00:35.130 error Caught by controller[0]: at IncomingMessage. <anonymous>(/opt/iobroker/node_modules/request/request.js:1085:12)
host.ubuntu-hd 2018-07-26 19:00:35.129 error Caught by controller[0]: at Request.emit (events.js:188:7)
host.ubuntu-hd 2018-07-26 19:00:35.129 error Caught by controller[0]: at emitOne (events.js:96:13)
host.ubuntu-hd 2018-07-26 19:00:35.129 error Caught by controller[0]: at Request. <anonymous>(/opt/iobroker/node_modules/request/request.js:1163:10)
host.ubuntu-hd 2018-07-26 19:00:35.129 error Caught by controller[0]: at Request.emit (events.js:191:7)
host.ubuntu-hd 2018-07-26 19:00:35.129 error Caught by controller[0]: at emitTwo (events.js:106:13)
host.ubuntu-hd 2018-07-26 19:00:35.129 error Caught by controller[0]: at Request.self.callback (/opt/iobroker/node_modules/request/request.js:186:22)
host.ubuntu-hd 2018-07-26 19:00:35.129 error Caught by controller[0]: at Request._callback (/opt/iobroker/node_modules/iobroker.robonect/lib/robonect.js:4182:86)
host.ubuntu-hd 2018-07-26 19:00:35.128 error Caught by controller[0]: TypeError: Cannot read property 'enable' of undefined</anonymous></anonymous></anonymous></anonymous> -
Darf ich das nochmal hochholen ?
Ich habe aktuell das Problem , das mit der Beta 5 der Roby wieder unmoviviert zu Piepen anfängt (hatten wir ja schonmal , wenn die Infos abgefragt wurden…) `
Aktuell mit der Beta 6 das gleiche…
-
Ich habe jetzt eine funktionierende Verbindung zum Mäher.
Zumindest wird derAdapter in der eingestellten Zeit von 60s immer kurzzeitig grün (sonst rot).
Leider piept der R40Li auch alle 60 Sekunden dann 2 mal kurz, ein Zustand den ich nicht auf Dauer haben kann und will.
Hat das jemand auch ohne Geräusche im Einsatz ?
Adapter erst mal wieder außer Betrieb genommen.
Der "Doppelpiep" des Mähers im Standby-Modus geht ja gar nicht wenn man noch gute Nachbarn will.
(Wie wurde das bei der Homematic-Abfrage gelöst, da hat er auch im Standby-Modes des Mähers nicht gepiept.)
-
Hallo zusammen,
ich nutze seit Jahren HomeMatic, bin zum ioBroker aber erst Anfang des Jahres gekommen. ioBroker hat mich mittlerweile so sehr überzeugt, dass ich alle Programme von HomeMatic nach ioBroker umgezogen habe. Ein einziger Punkt fehlte aber noch und zwar die Steuerung meines Mähroboters. Ich habe einen Gardena R70Li mit eingebautem Robonect HX Modul. Da es bisher keinen funktionierenden Adapter gab, habe ich mich dran gemacht einen Adapter auf Basis des hier im Forum (viewtopic.php?f=23&t=7725) vorgestellten Adapters von StefSign zu machen. Eine Anfrage an StefSign nach einer Zusammenarbeit wurde bisher leider nicht beantwortet.
Worin besteht der Unterschied zum vorherigen Adapter?
-
Unterstützung von Robonect HX Version 1.0 (Beta 2)
-
Unterstützung von Benutzername und Passwort
-
Sämtliche per API abfragbare Werte sind integriert
-
Erweiterungen (GPIO1, GPIO2, OUT1 und OUT2) können geschaltet werden
-
API Abfragen können priorisiert werden (Status = öfter, Info = weniger oft)
Warum gibt es einen Adapter, wenn Robonect HX seit neuestem MQTT unterstützt?
MQTT wird erst seit kurzem unterstützt und ist momentan noch etwas buggy. Der viel wichtigere Punkt ist aber, dass nicht alle per API abfragbaren Werte auch per MQTT übertragen werden.
Wo finde ich den Adapter?
Den Adapter habe ich bei GitHub veröffentlicht: https://github.com/braindead1/ioBroker.robonect
Wie geht es mit dem Adapter weiter?
Der Robonect Adapter ist mein erster Adapter für ioBroker. Bei mir funktioniert er im Testbetrieb ganz gut. Leider ist das Wetter bisher nicht gut genug gewesen, um den Mähroboter wieder täglich laufen zu lassen. Es kann also sein, dass noch ein paar Bugs enthalten sind. Ich würde mich sehr freuen, wenn jemand den Adapter bei sich ausprobieren könnte und mir Feedback gibt. Außerdem wäre es super, wenn ein erfahrener Adapter Entwickler sich den Code mal ansehen könnte in Bezug auf eine saubere Implementierung in den ioBroker.
Viele Grüße,
Markus
@braindead
Vielen Dank für den Adapter - Super Leistung.
Sollte eigentlich der Hersteller von Robonect liefern, aber der bastelt da lieber einen Zugang für Alexa,
weil das wohl populärer ist.Was mir aufgefallen ist bzw. noch fehlt ist "Distance" - die Entfernung bei Mähbeginn.
Was noch besonders wünschenswert wäre, eine Json Antwort wie sie vom Robonect WiFi Modul
unter GET /json?user=abc&pass=xyz&cmd=status ausgegeben wird.
Da steht das Wichtigste drin und so kann man sich mehrere Abfragen sparen.Viel Erfolg
Hans -
-
Danke für diesen Adapter.
Hat jemand für diesen Adapter eine Visu
und würde diese Bereitstellen.
Bin am erstellen aber im Feld Modus und Status bekomme
ich immer eine Zahl und nicht den Text.
Für einen Tip wäre ich dankbar.
Gruß BerniiGruß Berniiiii
-
Danke für diesen Adapter.
Hat jemand für diesen Adapter eine Visu
und würde diese Bereitstellen.
Bin am erstellen aber im Feld Modus und Status bekomme
ich immer eine Zahl und nicht den Text.
Für einen Tip wäre ich dankbar.
Gruß Bernii@berniiiii sagte in Neuer Robonect HX Adapter:
Danke für diesen Adapter.
Hat jemand für diesen Adapter eine Visu
und würde diese Bereitstellen.
Bin am erstellen aber im Feld Modus und Status bekomme
ich immer eine Zahl und nicht den Text.
Für einen Tip wäre ich dankbar.
Gruß BerniiBitte Suche benutzen.
Das hatte ich schon mehrmals gepostet.
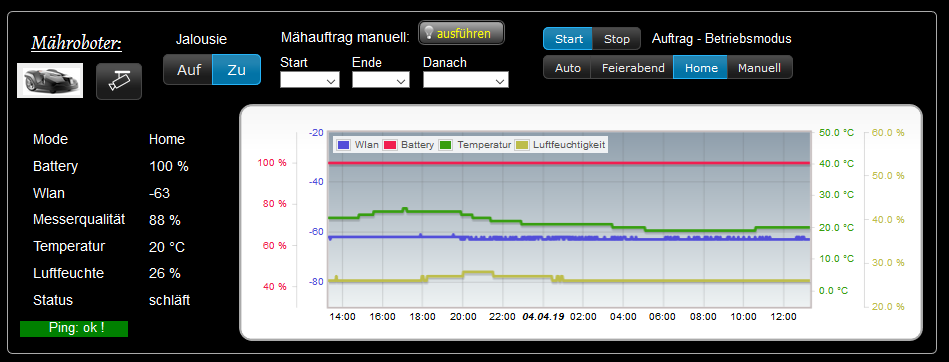
Inkl. Widget wie es geht; und auch VIS Darstellung.aktuell ist es bei mir so:
-
@berniiiii sagte in Neuer Robonect HX Adapter:
Danke für diesen Adapter.
Hat jemand für diesen Adapter eine Visu
und würde diese Bereitstellen.
Bin am erstellen aber im Feld Modus und Status bekomme
ich immer eine Zahl und nicht den Text.
Für einen Tip wäre ich dankbar.
Gruß BerniiBitte Suche benutzen.
Das hatte ich schon mehrmals gepostet.
Inkl. Widget wie es geht; und auch VIS Darstellung.aktuell ist es bei mir so:
@bahnuhr said in Neuer Robonect HX Adapter:
@berniiiii sagte in Neuer Robonect HX Adapter:
Danke für diesen Adapter.
Hat jemand für diesen Adapter eine Visu
und würde diese Bereitstellen.
Bin am erstellen aber im Feld Modus und Status bekomme
ich immer eine Zahl und nicht den Text.
Für einen Tip wäre ich dankbar.
Gruß BerniiBitte Suche benutzen.
Das hatte ich schon mehrmals gepostet.
Inkl. Widget wie es geht; und auch VIS Darstellung.aktuell ist es bei mir so:
Kannst du die Seite (View) hier ggf. zur Verfügung stellen? Würde mich persönlich sehr reitzen das System ähnlich aufzubauen.
Gruß,
Manuel -
Na klar kann ich machen.
Musst halt mal schauen wie du damit zurecht kommst.
Ich benutze den Adapter nicht (weil ich ein Script schon früher hatte).
Falls fragen, dann einfach melden.
mfg
-
Hallo bahnuhr,
danke für das bereitstellen deiner View. Ist es mit dem Adapter überhaupt möglich einen Mähauftrag zu erstellen? Oder wie hast du das umgesetzt?
Habe dazu leider keine genauen Infos gefunden im Adapter.
Gruß,
Manuel@manu96 sagte in Neuer Robonect HX Adapter:
Hallo bahnuhr,
danke für das bereitstellen deiner View. Ist es mit dem Adapter überhaupt möglich einen Mähauftrag zu erstellen? Oder wie hast du das umgesetzt?
Habe dazu leider keine genauen Infos gefunden im Adapter.
Gruß,
ManuelMähauftrag im Adapter: weiß ich nicht (ich nehm ihn ja nicht)
bei mir per script
Ich sende dann einfach ein http Befehl
und dieser muss halt auf deinen Robo passen.mfg
-
@braindead
Vielen Dank für den Adapter - Super Leistung.
Sollte eigentlich der Hersteller von Robonect liefern, aber der bastelt da lieber einen Zugang für Alexa,
weil das wohl populärer ist.Was mir aufgefallen ist bzw. noch fehlt ist "Distance" - die Entfernung bei Mähbeginn.
Was noch besonders wünschenswert wäre, eine Json Antwort wie sie vom Robonect WiFi Modul
unter GET /json?user=abc&pass=xyz&cmd=status ausgegeben wird.
Da steht das Wichtigste drin und so kann man sich mehrere Abfragen sparen.Viel Erfolg
Hans
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden478
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge