NEWS



Announce: Vorwerk VR200 Saugroboter Adapter
-
Hallo Männers,
ich habe eine Interessante Beobachtung gemacht, oder der Knoten sitzt mal wieder bei mir zwischen den Ohren. Wenn der VR200 reinigt und ich ihn mit gotobase heimschicke fährt er zurück aber stellt sich vor die Ladestation. Das selbe wenn er startet ohne ihn zu stoppen.
Woran kann das liegen? Ein Start über die App funktioniert fehlerfrei.
-
Hallo zusammen,
ich habe gerade übers Wochenende einen VR200 zum Testen hier.
Beim Einbinden ist mir gerade folgendes aufgefallen.
lt. LOG liest er die Daten des VR200 aus
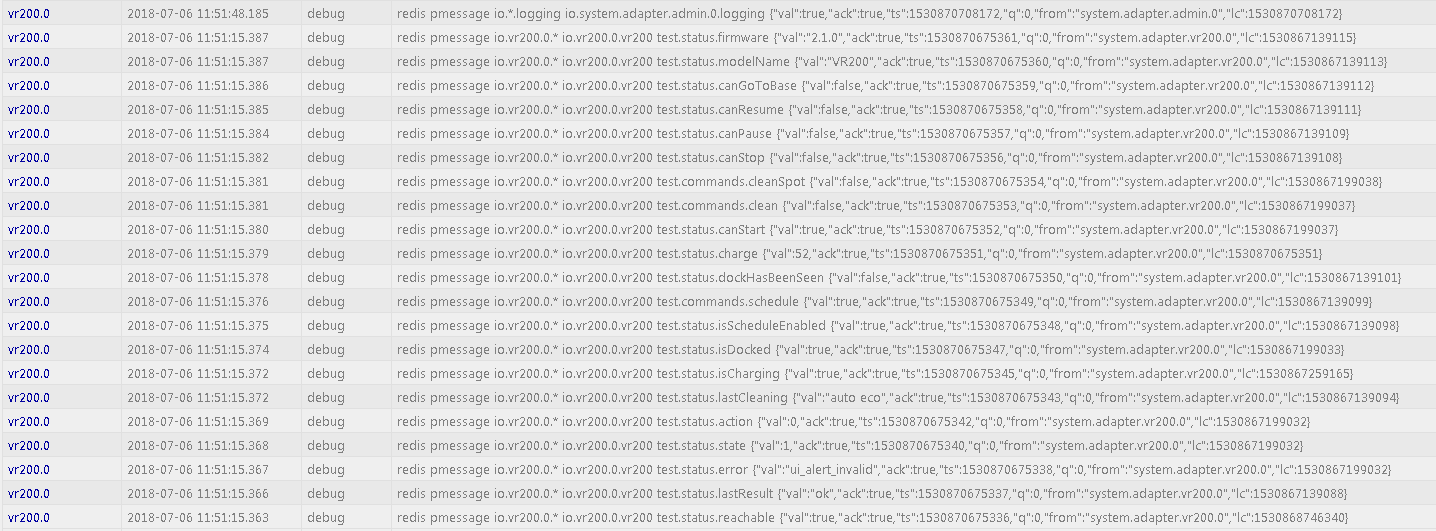
in den Objekten bleibt bei Status jedoch alles leer
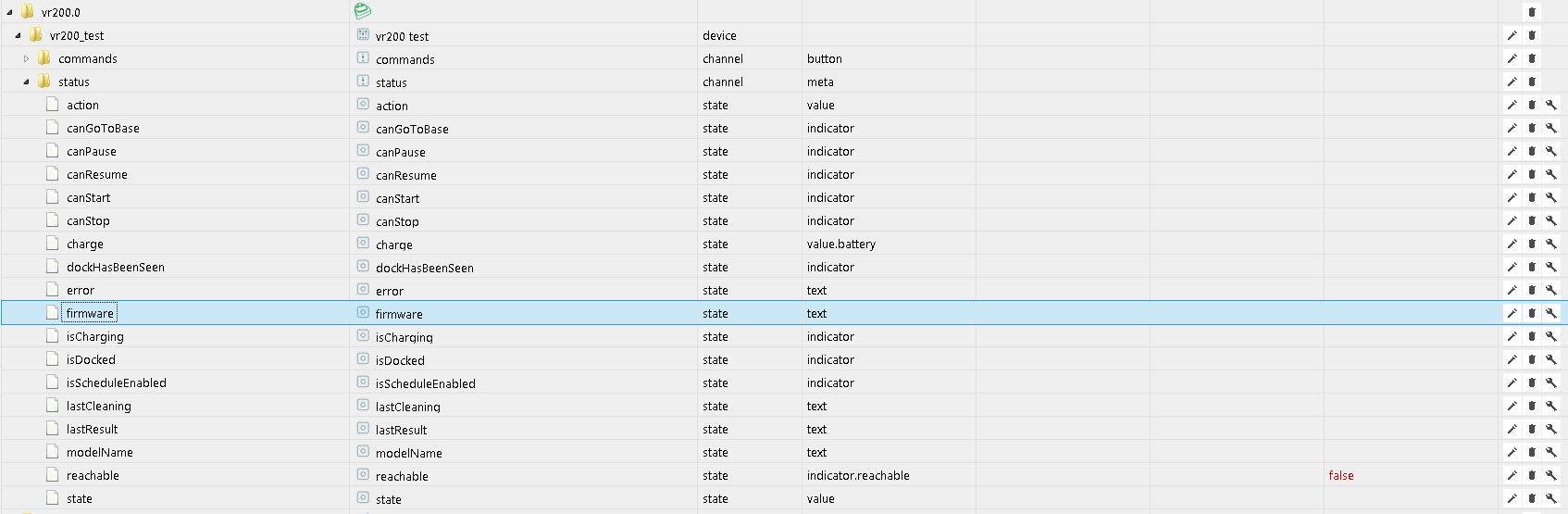
Ist dies u.U. ein Bug oder läuft bei mir hier was falsch?
Wäre Klasse, wenn ich das bis zum Ende des Wochenendes lösen könnte, da ich das Ding am Montag nachmittag wieder abgeben muss.
Gruss
Silvio
-
Hi cybertron
Nur mal so gefragt, du hast nach dem ersten Start den reload Button der Objekte benutzt?
Ich hatte das auch schon, dass die Werte im Browser nicht da waren und erst nach einem Reload sichtbar wurden.
Wie heißt denn dein Robi in der App?
Gruß Eisbaeeeer
-
Hi Eisbaeeeer,
die Frage nach dem Name war eine Idee.
Der Robi hies ursprünglich "VR200 Test".
Ich habe ihnjetzt mal umbenannt und den Adapter noch ein weiters mal neu installiert.(Hatte ich davor aber auch schon mehrere Male versucht)
Mit dem Namen "VR200_OG" funktioniert es jetzt.. :D
Was mir aber auch noch aufgefallen ist, ist die Versionsangabe im Admin.

Hier sieht es noch so aus, als wäre die aktuell verfügbare Version die 0.0.2
Tut der Funktionalität zwar nix, verwirrt aber eventuell diejenigen, die noch nicht so tief in iobroker drin stecken.
Gruss
Silvio
-
Hallo einmal an das ganze Forum,
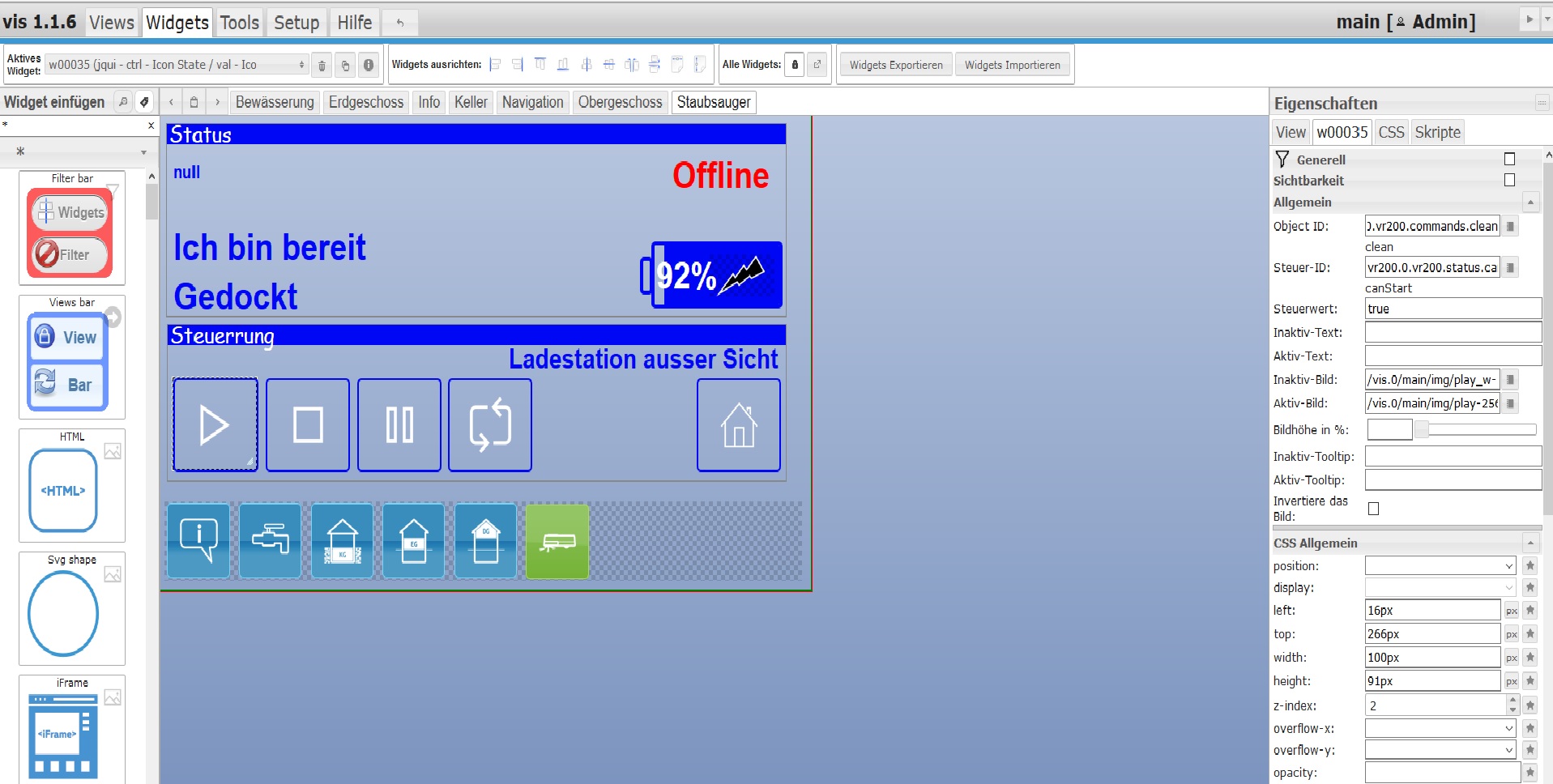
Habe mir das View vom VR200 in mein Vis importiert. Die Zustandsanzeige habe ich auch erfolgreich in mein Vis umgebaut. Leider komme ich mit der Steuerung nicht zurecht.
Vielleicht kann mir da wer helfen
mfg
Stylemaster
P.s. anbei ein paar bilder von den Widget einstellungen und vom Log im IO Broker
-
Hallo,
kann mir jemand ein paar Tipps geben wie ich diesen Adapter in yahka einbinde. Beide Adapter funktionieren und VR200 kann ich mittels VIS steuern (jedenfalls grob ;) ).
Ich scheitere an der Konfiguration von yahka. Mir ist bewusst das dies ehr dem yahka-Beitrag zuzuordnen ist, aber vielleicht hat hier schon jemand dieses Kopplung gelöst.
Gruß und Danke
-
Hallo einmal an das ganze Forum,
Habe mir das View vom VR200 in mein Vis importiert. Die Zustandsanzeige habe ich auch erfolgreich in mein Vis umgebaut. Leider komme ich mit der Steuerung nicht zurecht.
Vielleicht kann mir da wer helfen
mfg
Stylemaster `
Hallo Stylemaster
Bist du hier weiter gekommen?
Es scheint, als ob dein VR200 gar keine Verbindung mit iobroker hat. Hast du den VR200 richtig konfiguriert? Siehst du deinen Robi in der Handy-App?
Wichtig ist auch, keine Leerzeichen oder Sonderzeichen in dem Namen zu verwenden, sonst klappt die Kopplung nicht. Eventuell hast du auch noch eine alte Firmware auf dem VR200?
Das sind erstmal alle Ideen, die mir dazu einfallen.
Gruß Eisbaeeer
-
Hallo,
naja teils teils. Sehe tu ich den vr200 (hat auch den namen) das interresante an der geschichte wenn ich mittels Handy (iobroker.vis) app ihn starte funktioniert er auch. Habe noch ein raspy mit touch display verbaut worauf die vis app über browser gestartet ist da mag er mir nicht starten (verstehe aber nicht warum) hab gerade gesehen das ich noch ein SW update auf 2.1.4 machen kann werde das mal versuchen vielleicht hilft es mir dann weiter
p.s.: meine anderen Lichtschalter und Alexa kann ich darüber ohne probleme steuern (sprich auf dem raspy)
noch wer eine andere Idee?
-
Hallo Eisbaeeer,
ich habe seit kurzem einen VR200 und auch ioBroker im Einsatz.
Nun habe ich den VR Adapter 1.0.0 installiert und dank Deiner Vorlage diesen auch in VIS integriert.Hier habe ich das Problem, dass ich zwar alle Statusmeldungen angezeigt bekomme, aber den VR nicht steuern kann. Ich habe diesen auch schon in "vr200" und "VR200" umbenannt, da dies bei einigen hier wohl geholfen hat. Leider bei mir nicht.
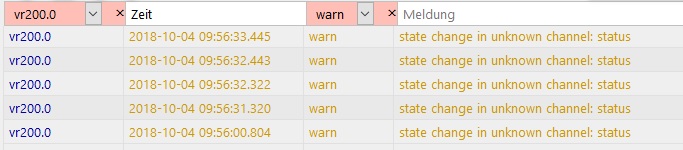
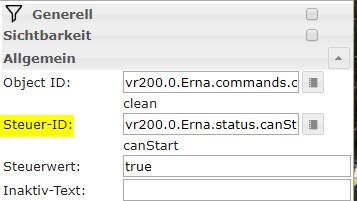
Ich bekomme im LOG auch den Fehler: "state change in unknown channel: status".
Wenn ich aber den Befehl in der Steuer-ID entferne, reagiert der Sauger:
Kannst Du mir da weiterhelfen oder hast Du mir eventuell einen Tipp?
Danke im voraus für die Mühe.
Grüße Andreas
-
Hallo Eisbaeeer,
ich habe seit kurzem einen VR200 und auch ioBroker im Einsatz.
Nun habe ich den VR Adapter 1.0.0 installiert und dank Deiner Vorlage diesen auch in VIS integriert.Hier habe ich das Problem, dass ich zwar alle Statusmeldungen angezeigt bekomme, aber den VR nicht steuern kann. Ich habe diesen auch schon in "vr200" und "VR200" umbenannt, da dies bei einigen hier wohl geholfen hat. Leider bei mir nicht.
Ich bekomme im LOG auch den Fehler: "state change in unknown channel: status".
Wenn ich aber den Befehl in der Steuer-ID entferne, reagiert der Sauger:
Kannst Du mir da weiterhelfen oder hast Du mir eventuell einen Tipp?
Danke im voraus für die Mühe.
Grüße Andreas
@FischerICT sagte in Announce: Vorwerk VR200 Saugroboter Adapter:
Hallo Eisbaeeer,
ich habe seit kurzem einen VR200 und auch ioBroker im Einsatz.
Nun habe ich den VR Adapter 1.0.0 installiert und dank Deiner Vorlage diesen auch in VIS integriert.Hier habe ich das Problem, dass ich zwar alle Statusmeldungen angezeigt bekomme, aber den VR nicht steuern kann. Ich habe diesen auch schon in "vr200" und "VR200" umbenannt, da dies bei einigen hier wohl geholfen hat. Leider bei mir nicht.
Ich bekomme im LOG auch den Fehler: "state change in unknown channel: status".
Wenn ich aber den Befehl in der Steuer-ID entferne, reagiert der Sauger:
Kannst Du mir da weiterhelfen oder hast Du mir eventuell einen Tipp?
Danke im voraus für die Mühe.
Grüße Andreas
Hat den keiner eine Idee oder Lust zu Helfen?
-
@FischerICT sagte in Announce: Vorwerk VR200 Saugroboter Adapter:
Hallo Eisbaeeer,
ich habe seit kurzem einen VR200 und auch ioBroker im Einsatz.
Nun habe ich den VR Adapter 1.0.0 installiert und dank Deiner Vorlage diesen auch in VIS integriert.Hier habe ich das Problem, dass ich zwar alle Statusmeldungen angezeigt bekomme, aber den VR nicht steuern kann. Ich habe diesen auch schon in "vr200" und "VR200" umbenannt, da dies bei einigen hier wohl geholfen hat. Leider bei mir nicht.
Ich bekomme im LOG auch den Fehler: "state change in unknown channel: status".
Wenn ich aber den Befehl in der Steuer-ID entferne, reagiert der Sauger:
Kannst Du mir da weiterhelfen oder hast Du mir eventuell einen Tipp?
Danke im voraus für die Mühe.
Grüße Andreas
Hat den keiner eine Idee oder Lust zu Helfen?
@FischerICT
Meines Wissens sind die Werte in .status. tatsächlich nur Statuswerte, d.h. nur die Info, dass er starten könnte. Gestartet werden muss er, indem der Wert in Deiner Objekt ID auf true gesetzt wird. -
Hallo zusammen
Ich hab mal einen separaten Thread eröffnet. Es wurden schon einige Fragen im Neato Botvac Thread geklärt, doch ich wollte den nicht noch mehr belasten.
Es gibt seit kurzem den ioBroker.vr200 Adapter. Grundsätzlich basiert dieser auf dem Neato Botvac. Vorwerk bezieht diesen von Neato.
Die API wurde von Pmant als node module und Adapter geschrieben und nur wenige Änderungen (URL´s und Zertifikate) haben es ermöglicht, das Modul anzupassen. Diese Anpassung hat freundlicherweise "nicoh88" vorgenommen und das node-module veröffentlicht. Ich habe dann nur noch das iobroker Modul angepasst und veröffentlicht. Danke an Pmant und nicoh88.
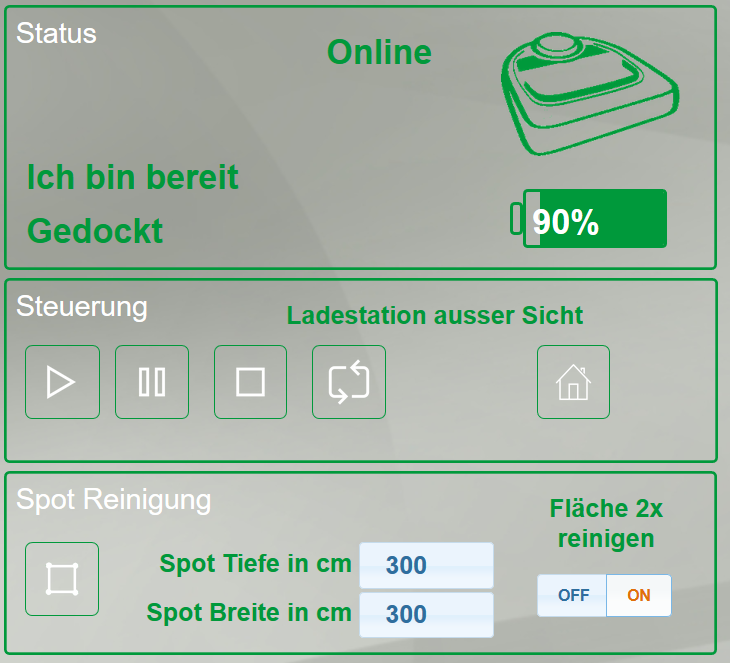
Jetzt zum eingentlichen. Der Adapter sollte bereits in der Liste stehen. Was noch fehlt ist die View. Leider hat noch niemand ein Widget geschrieben, aber ich habe mal eine View erstellt. Alle nötigen Daten sind in der ZIP-Datei.
Der Export ist hier in einer ZIP mit angehängt.
Gruß Eisbaeeer
-
Hi Eisbaeeer,
sorry bin neu hier,
wo finde ich denn deine Zip Datei von der du schreibst hier.vielen lieben Dank im Voraus
-
Hallo,
ich habe mir das zip geladen.
Allerdings komme ich mit dem integrieren nicht klar.Was muss ich tun, damit ich es jetzt genau so angezeigt bekomme wie im Post 1 ?
Wohin müssen die beiden Ordner "ios" und "set" bzw in welches Verzeichniss muss ich die Dateien kopieren ?
Wenn ich den View importiere, bekomme ich die Fehlermeldung:"Cannot render view VR_200. Invalid settings"Sorry für die Fragen, aber so ganz kapiert habe ich das System noch nicht:relieved:
Danke, Holly -
Hallo Eisbaeeer,
habe gerade Dein VR200-template geladen und in VIS importiert
Anschließend habe die Befehle auf den Namen "Erna" geändert. Ich kann nun Start, Stop und Pause ausführen und der Robi reagiert. Auch die Akkukapazität, Status, Fehler wird mir angezeigt.Leider reagiert der Rest überhaupt nicht "Spot, Eco usw."
Kann mir hier jemand weiterhelfen, da ich in iobroker noch kompletter Anfänger bin.
Danke und Grüße,
Andreas
-
@FischerICT @Holly76
Also die Bilder kannst du nach belieben im VIS Bilder Ordner ablegen (hochladen). Dann in VIS die entsprechenden Buttons anklicken und dein hochgeladenes Bild zuordnen.@FischerICT
Das ist doch schon mal ein Schritt.
Spot, Eco, Home usw. reagiert nur, wenn der VR200 auch den Befehl ausführen kann. Alle bedienbaren Funktionen sind grün hinterlegt. Was "false" ist, geht auch nicht. Schau mal in den Datenpunkten nach.
Das liegt dann z.B. an folgendem:-
VR200 hat seine Basis noch nicht gesehen --> dann geht auch "Home" nicht.
-
VR200 ist nicht auf Stop --> dann geht auch Spot nicht
-
Eco muss zuerst angewählt werden, bevor der VR200 mit Play gestartet wurde. Während der Reinigung wechselt er nicht mehr auf Eco oder Normal. Man muss also vor dem Start Eco anwählen. Bitte auch die README.md dazu lesen, da steht dieser Sachverhalt beschrieben.
Grundsätzlich kannst du davon ausgehen, dass der Adapter voll funktioniert, wenn der VR200 reagiert. Der VR200 hat ein paar Besonderheiten bezüglich "Basis anfahren" usw. Meiner sieht erst nach einer ganzen Weile seine Basis, obwohl er schon ein paar mal daran vorbeigefahren ist.
Spot funktioniert, wenn er auf Stop steht. Dann Spot Reinigung auswählen und dann auf Start. Du kannst noch die Spot Fläche in cm angeben. Standard ist 100cm X 100cm.
Auszug aus der README.md:
Examples
clean in eco mode
check if status.canStart is true
set commands.eco to true
set commands.clean to trueclean a 150cm * 150cm spot
place the VR200 in front of the desired location
check if status.canStart is true
set commands.spotHeight and commands.spotWidth to 150
set commands.cleanSpot to truereturn to base
status.dockHasBeenSeen has to be true
VR200 has to be in paused or stopped state (commands.stop / commands.pause)
set commands.goToBase to trueGrüße Eisbaeeer
-
595
Online32.7k
Users82.3k
Topics1.3m
Posts