

Status, Steuerung und Automatisierung Robomow (Rasenmähroboter)
-
Ich habe auch bereits alles zu Hause liegen, nur noch keine Zeit gehabt zu löten :-(
Vielleicht komme ich am Wochenende dazu.
Hast du noch Bilder von der Rückseite der Platine?? Würde mich ja interessieren.
Auf dein Script bin ich nachher gespannt :-) Vielen Dank dafür.
Gruß
-
Ich habe hier eine ganz "normale" Streifenplatine genommen:
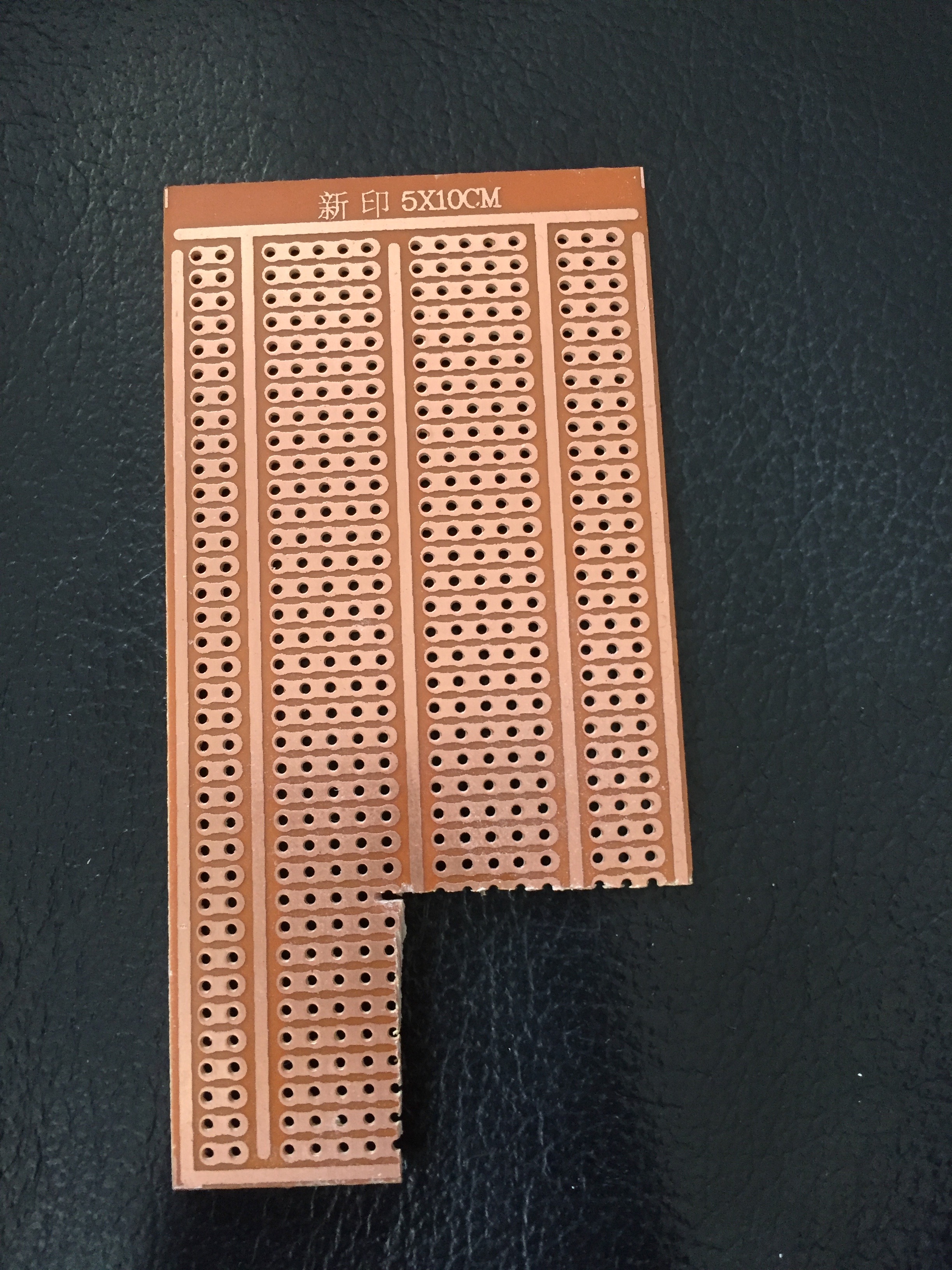
Dort so einen Teil mit 5 löchern in Reihe. Da dann das kabel hier genommen: https://www.reichelt.de/PS-25-8G-WS/3/i … 25%2F8G+WS
Die Steckerleiste aufgelötet, dann das Kabel passend dazu (das ist die zweite Reihe) und dann in der "dritten" Reihe mein Kabel was zur Steuerung geht.
Rückseite ist mit Heißkleber dicht, da sieht man nix mehr :-)
Wichtig war die richtige Reihenfolge der Kabel, da das Reichelt-Kabel eine andere Farbbelegung hat wie das Originalkabel. Ich habe es so:
Original-Kabel Robomow -> Reichelt-Steckerkabel -> mein 8-poliges Kabel -> Funktion
braun (1) -> lila -> braun -> Masse
rot (2) -> blau -> rot -> Stop-Button
orange (3) -> grün -> schwarz -> unbekannt/frei
gelb (4) -> gelb -> gelb -> Mähen mit Kante Button/Links
grün (5) ->orange -> grün -> Mähen ohne Kante/Rechts
blau (6) -> rot -> blau ->Home-Button
lila (7) -> braun -> lila -> OK-Button
grau (8) ->schwarz -> grau -> +26V
Ich habe ein 8-poliges Kabel genommen was nahezu die gleichen Farben hat wie das Robomow Kabel. Nur orange gabs nicht und das war hier schwarz.
Hilft das?!
Ingo F
-
Junge junge junge, da hast du mir echt viel Arbeit erspart ;-)
Jetzt kann ich meine sonoff mit Leistungsmessung auch mal auspacken und zwischen die Ladestation klemmen. Somit können die Teile auch mal direkt im Feld erprobt werden mit espeasy.
Wie hast du das mit dem fensterkontakt gemacht?
Ich glaube ich fange morgen schon mit dem Mäher an. :P
Gruß
-
Ich habe keinen Fensterkontakt, sondern einen Induktionssensor. Ich habe ein Stück Edelstahl von innen mit Panzertape an die Verkleidung geklebt und dann von Aussen den Induktionssensor platziert. Damit reicht (bei meinem) ein Abstand von ca. 1-2cm und ich erkenne die Anwesenheit.
Mit Fensterkontakt geht vllt der optische am besten wenn man was reflektierendes findet. Magnete musst Du zu nah um Kontakt zu bekommen und dafür fährt er dann doch immer leicht unterschiedlich rein.
Das Signal vom Induktionssensor geht dann über nen Arduino zu CuxD in der CCU (noch historisch, baue ich irgendwann mal noch auf ioBroker direkt um)
-
Das Signal vom Induktionssensor geht dann über nen Arduino zu CuxD in der CCU (noch historisch, baue ich irgendwann mal noch auf ioBroker direkt um) `
Schau dir mal Espruino an. Der Puck.js hat Bluetooth, einer der anderen WLAN. Kannste einfach mit JS programmieren. Mit dem Puck könntest du z.B. die Signale per Bluetooth Advertisements an den Raspi senden und dort per Skript in ioBroker einspeisen. Code kann ich dir geben. -
Ich hab eh nen Arduino mit einiger eigener Logik im Gartenhaus (Steuerung Beregnerventile, Bodenfeuchtemessung, Temperaturmessung und all sowas), da ist ein einfacher Kontakt direkt das kleinste Thema :-)
Und Arduino-Programmierung hab ich mir in dem Fall beigebracht weil ich inzwischen drei solche Arduinos hab für verschiedenste Themen.
Das läuft recht stabil und fällt gerade eher unter "Never change a running System" … vllt für später mal, aber in jedem Fall ein Blick wert! Danke!
-
Never change a running System `
Ja ich dachte auch in Hinblick auf deine Überarbeitung ohne CCU. Habe dabei aber aus irgendeinem Grund an einen drahtlosen Sensor im Roboter gedacht, nicht einen fest verkabelten - das ist natürlich wesentlich einfacher.Wenn du in die Verlegenheit kommst, was Drahtloses zu brauchen, Bluetooth ist mit dem Puck ein Kinderspiel.
-
Ich habe mal im ersten Post alles so aktualisiert wie es sich im laufe der zeit noch weiterentwickelt hatte.
v20180101:
-
Allgemein Aktualisierung auf aktuellen Stand mit vielen Optimierungen und Fehlerbehebungen
-
Regenpause-Logik (neuer State und auch neues Skript, siehe Post #1!) eingefügt
-
Optimierungen in der Logik
-
Logik für Zwangspause Rest des aktuellen Tages inkl. Heimholen beim einschalten
-
Minimale Arbeitstemperatur berücksichtigt
-
stopScript Logik hinzugefügt
-
Logging, Heim-Holen wenn unterwegs und Bestätigung für Automatikänderungen eingeführt
-
-
hat da jemand erfahrungen mit einem robomow ms1000?
-
werde am wochenende schauen, dass ich rein komme :-)
-
hallo
jetzt ist es schon länger her, das mit dieses thema interessiert hätte, bin aber nicht dazu gekommen. allerdings naht der winter und ich seh das als projekt für diese zeit.
gibt es irgendwelche neuerungen oder erkenntnisse in dem bereich? sei es was die hardware anbelangt oder software-technisch?
@apollon: hast du vielleicht deine skripte irgendwo im Git abgelegt?
lg chris
-
@apollon: hast du vielleicht deine skripte irgendwo im Git abgelegt? `
ne, aber hier im Thread im allerersten Post liegen Sie?
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
378
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge