

Frage zu Klipper
-
-
@da_Woody @ESP8266 @Jabba_the_Hutt
So, hier könnt ihr euch jetzt austoben! ;)
@Jabba_the_Hutt, nö nö, von mir gibts keine auf den Deckel. Wenn, dann fahr ich mal über den großen Zeh!


-
@jabba_the_hutt pff, wie soll ichs beschreiben... ich kann fahren, aber wenn ich nach home (mit nem bl touch) x nach min fahren will, macht er nur einen kleinen ruck und nicht die z.b. -100. plus fährt er brav. y und z funktionieren...
gruß vom Woody
HAPPINESS is not a DESTINATION, it's a WAY of LIFE! -
@jabba_the_hutt pff, wie soll ichs beschreiben... ich kann fahren, aber wenn ich nach home (mit nem bl touch) x nach min fahren will, macht er nur einen kleinen ruck und nicht die z.b. -100. plus fährt er brav. y und z funktionieren...
@da_woody
Welcher Drucker ist das? Sind da TMC2208 oder 2209 verbaut? UART Modus oder Standalone? -
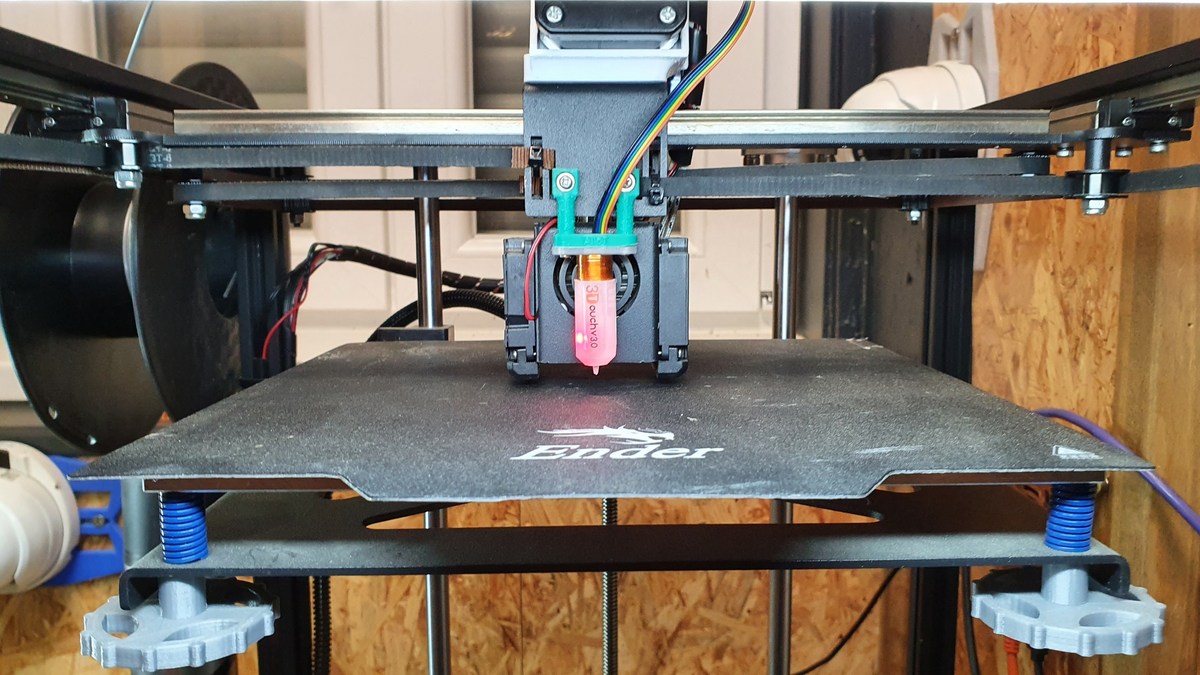
Nachdem das ja auch zum allgemeinen Hilfethema für Klipper werden kann .... hier mal meine ganzen Drucker.
1&2: Ender 3 Pro mit BTT SKR E3 RFF, sensorless homing, Umbau auf Stealthburner und Dragon HF Hotend
3: Tevo Tarantula (den gab es vergangenes Jahr als Aktion um 75€ gg) mit BTT SKR E3 RFF, sensorless homing, auch auf Steahltburner umgerüstet. Hier ist allerdings noch das Volcano mit Titanheatbreak im Einsatzdemnächst: Drucker #4: Voron 2.4 350x350. Hier kommen zwei SKR Pico zum Einsatz.
-
@da_woody
Welcher Drucker ist das? Sind da TMC2208 oder 2209 verbaut? UART Modus oder Standalone?@jabba_the_hutt LOL, auf die fragen hab ich gewartet... :D
is ein sapphire pro, umgebaut nach den stonetime videos bltouch und alles auf 2209er uart.
ich häng dir mal die printer.cfg ran. vllt fällt dir was auf...
cfg.txt
pid und sonstiges ist noch nix getan.mein ender3v2 druckt wie ein prinz in letzter zeit... :) allerdings nicht mit klipper
gruß vom Woody
HAPPINESS is not a DESTINATION, it's a WAY of LIFE! -
@jabba_the_hutt LOL, auf die fragen hab ich gewartet... :D
is ein sapphire pro, umgebaut nach den stonetime videos bltouch und alles auf 2209er uart.
ich häng dir mal die printer.cfg ran. vllt fällt dir was auf...
cfg.txt
pid und sonstiges ist noch nix getan.mein ender3v2 druckt wie ein prinz in letzter zeit... :) allerdings nicht mit klipper
[tmc2209 stepper_x] uart_pin: PA3 run_current: 0.850 hold_current: 0.30 stealthchop_threshold: 0Änder das mal auf:
[tmc2209 stepper_x] uart_pin: PA3 run_current: 0.650 hold_current: 0.30 stealthchop_threshold: 999999Klingt bei dir danach, als irgendeine Rolle auf der X-Achse zu stramm läuft und der Stepper dann einen zu hohen Widerstand erkennt. Wenn das nicht ganz hilft ... geh mit dem run_current sanft hoch bis auf max. 0.750.
-
[tmc2209 stepper_x] uart_pin: PA3 run_current: 0.850 hold_current: 0.30 stealthchop_threshold: 0Änder das mal auf:
[tmc2209 stepper_x] uart_pin: PA3 run_current: 0.650 hold_current: 0.30 stealthchop_threshold: 999999Klingt bei dir danach, als irgendeine Rolle auf der X-Achse zu stramm läuft und der Stepper dann einen zu hohen Widerstand erkennt. Wenn das nicht ganz hilft ... geh mit dem run_current sanft hoch bis auf max. 0.750.
@jabba_the_hutt k, schau ich mir morgen an! könnte sein, das da eine rolle wo klemmt...
hau mich jetzt in die horizontale. thnx mal... war ein langer tag.gruß vom Woody
HAPPINESS is not a DESTINATION, it's a WAY of LIFE! -
@jabba_the_hutt k, schau ich mir morgen an! könnte sein, das da eine rolle wo klemmt...
hau mich jetzt in die horizontale. thnx mal... war ein langer tag.[stepper_x] step_pin: PD5 dir_pin: !PD4 enable_pin: !PD7 microsteps: 16 rotation_distance: 40 endstop_pin: tmc2209_stepper_x:virtual_endstop #endstop_pin: ^PC0 position_endstop: -24 Position_min: -24 position_max: 230 homing_speed: 20 homing_retract_dist: 0 [tmc2209 stepper_x] uart_pin: PD6 #tx_pin: PC10 diag_pin: ^PC0 #uart_address: 0 run_current: 0.580 #hold_current: 0.500 stealthchop_threshold: 999999 driver_SGTHRS: 50So sieht das bei mir aus mit sensorless homing auf der X-Achse. Der Wert
driver_SGTHRS: 50 ist hierbei die "Feinheit" beim Auslösen vom Endanschlag. -
[stepper_x] step_pin: PD5 dir_pin: !PD4 enable_pin: !PD7 microsteps: 16 rotation_distance: 40 endstop_pin: tmc2209_stepper_x:virtual_endstop #endstop_pin: ^PC0 position_endstop: -24 Position_min: -24 position_max: 230 homing_speed: 20 homing_retract_dist: 0 [tmc2209 stepper_x] uart_pin: PD6 #tx_pin: PC10 diag_pin: ^PC0 #uart_address: 0 run_current: 0.580 #hold_current: 0.500 stealthchop_threshold: 999999 driver_SGTHRS: 50So sieht das bei mir aus mit sensorless homing auf der X-Achse. Der Wert
driver_SGTHRS: 50 ist hierbei die "Feinheit" beim Auslösen vom Endanschlag.@jabba_the_hutt hmpf, heute einfach nicht dazu gekommen. hab gerade die werte mal eingetragen, bin allerdings nicht beim drucker. der restart tut mal... :D
was mich da etwas verwirrt, ich hab bei der rotation_distance 32, du 40... andere nemas?
könntest du mal deine komplette printer.cfg anhängen? dann kann ich auch nach anderen ungereimtheiten suchen...gruß vom Woody
HAPPINESS is not a DESTINATION, it's a WAY of LIFE! -
@jabba_the_hutt hmpf, heute einfach nicht dazu gekommen. hab gerade die werte mal eingetragen, bin allerdings nicht beim drucker. der restart tut mal... :D
was mich da etwas verwirrt, ich hab bei der rotation_distance 32, du 40... andere nemas?
könntest du mal deine komplette printer.cfg anhängen? dann kann ich auch nach anderen ungereimtheiten suchen...@da_woody Meine printer.cfg bringt Dir nichts.
Bzgl. rotation_distance ==> https://github.com/Klipper3d/klipper/blob/master/docs/Rotation_Distance.md#rotation-distance
-
@da_woody Meine printer.cfg bringt Dir nichts.
Bzgl. rotation_distance ==> https://github.com/Klipper3d/klipper/blob/master/docs/Rotation_Distance.md#rotation-distance
@jabba_the_hutt oi, das git kenn ich, aber hab das mit der rotation nicht nicht ganz behirnt... :D
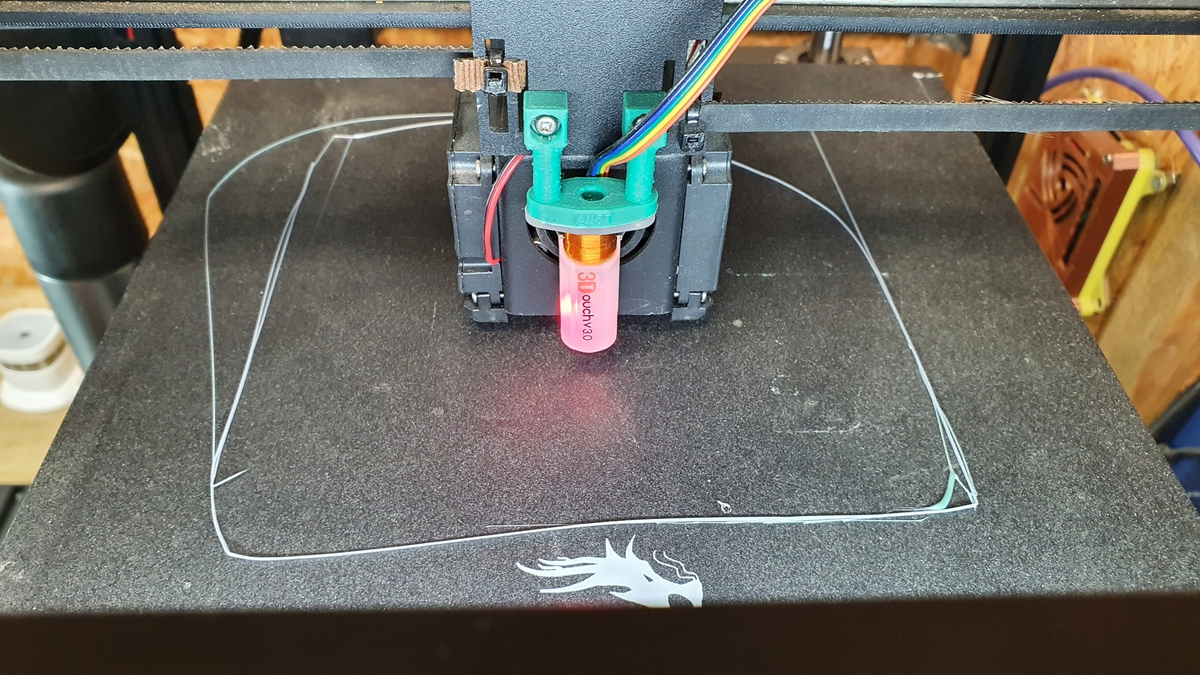
hab jetzt die 40 genommen und plötzlich ist auch das z homing dort, wo es sein sollte!
war da immer zu weit rechts und zu weit vorne mit dem 110x110. x tut auch mal mit -100 usw.
dank mal recht fett! :) mal einen probedruck anreissen...
hat zwar alles nichts mit ioB zu tun, finds aber ok, wenn man sich darüber unterhalten kann. vllt gibts dann auch mal was richtung adapter...gruß vom Woody
HAPPINESS is not a DESTINATION, it's a WAY of LIFE! -
@jabba_the_hutt oi, das git kenn ich, aber hab das mit der rotation nicht nicht ganz behirnt... :D
hab jetzt die 40 genommen und plötzlich ist auch das z homing dort, wo es sein sollte!
war da immer zu weit rechts und zu weit vorne mit dem 110x110. x tut auch mal mit -100 usw.
dank mal recht fett! :) mal einen probedruck anreissen...
hat zwar alles nichts mit ioB zu tun, finds aber ok, wenn man sich darüber unterhalten kann. vllt gibts dann auch mal was richtung adapter...@Jabba_the_Hutt ok, spuckt mal was raus. klar, ohne pit und mash nix gutes, von haftung keine rede... :D muss mich da wieder einlesen.
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
330
Online32.9k
Benutzer83.2k
Themen1.3m
Beiträge