

Neuer Robonect HX Adapter
-
@Bulli-Bultmann eine Frage vorweg, nimmt der Robonect Adpater intern ein ping Kommando her, um initial die Verbindung zu prüfen? Wenn ja weiß ich warum es nicht geht.
Der LXC container ist nicht privilegiert und damit kann nur root pingen. Nachdem ioBroker aber unter einem User läuft, wird das ping dann scheitern.@Bulli-Bultmann Ich glaub das ist das Problem. Ich hab obwohl ich Javascript nicht so fit bin, das hier gefunden initial bevor überhaupt versucht wird auf das Robonect zuzugreifen:
ping.sys.probe(this.robonectIp, async function (isAlive) {
...Wenn ich das richtig verstehe, wird da tatsächlich ein System-Ping an die IP abgesetzt ohne Root zu sein. Das ist jetzt bei unprivilegierten Containern ein Problem. Ich setz den ioBroker mal privilegiert neu auf (muss dazu leider komplett neu installieren). Dann müsste es klappen, bzw. ich könnte auch den Robonect-Adapter mal patchen, weil ich mir die Frage stell ob der ping wirklich sinnvoll ist an der Stelle.
Danke für deine Mühen!
-
@Bulli-Bultmann Ich glaub das ist das Problem. Ich hab obwohl ich Javascript nicht so fit bin, das hier gefunden initial bevor überhaupt versucht wird auf das Robonect zuzugreifen:
ping.sys.probe(this.robonectIp, async function (isAlive) {
...Wenn ich das richtig verstehe, wird da tatsächlich ein System-Ping an die IP abgesetzt ohne Root zu sein. Das ist jetzt bei unprivilegierten Containern ein Problem. Ich setz den ioBroker mal privilegiert neu auf (muss dazu leider komplett neu installieren). Dann müsste es klappen, bzw. ich könnte auch den Robonect-Adapter mal patchen, weil ich mir die Frage stell ob der ping wirklich sinnvoll ist an der Stelle.
Danke für deine Mühen!
Backitup sicherung erstellen.
Sicherung im Netz ablegen.
Neuen Container erstellen privilegiert.
iob installieren
Backitup installieren.
Backup einspielen.Viel Erfolg.
Gruß Bulli.
-
Backitup sicherung erstellen.
Sicherung im Netz ablegen.
Neuen Container erstellen privilegiert.
iob installieren
Backitup installieren.
Backup einspielen.Viel Erfolg.
Gruß Bulli.
@Bulli-Bultmann Zusammenfassung der Aktion:
ping sollte für ioBroker zur Verfügung stehen, sonst klaut man ihm ne Funktionalität, die unter Umständen nützlich sein kann.
D.h. ich hab jetzt eine privilegierten Container gebaut, wo ich den ioBroker wieder reininstalliert hab. Jetzt funktioniert auch das Robonect richtig. -
@Bulli-Bultmann Zusammenfassung der Aktion:
ping sollte für ioBroker zur Verfügung stehen, sonst klaut man ihm ne Funktionalität, die unter Umständen nützlich sein kann.
D.h. ich hab jetzt eine privilegierten Container gebaut, wo ich den ioBroker wieder reininstalliert hab. Jetzt funktioniert auch das Robonect richtig.@mobster80
Top.Habe vor ungefähr einem Jahr mal was dazu gelesen, als der Adapter überarbeitet wurde.
Na denn viel Spaß noch.
Mein Mouwer ist schon eingelagert.Bulli
-
Ich habe gerade das gleiche Problem wie du.
Ich hatte bisher einem unprivilegierten CT und darin iobroker als root installiert.- robonect adapter lief problemlos
kürzlich habe ich iobroker neu installiert in einen unprivilegierten CT als user.
- robonect läuft nicht
gem. deinem Tip hatte ich den CT in einen privilegierten CT umgewandelt
- robonect läuft aber immer noch nicht
als user kann ich den robonect nicht pingen
als root fuktioniert eshat noch jemand einen Tip ????
-
ich hab das Problem jetzt selbst gelöst.
es liegt nicht an privilegierten oder unprivilegierten CT.
das Problem sind die user rechte.
nur root darf den Befehl Ping ausführen.
also "sudo chmod 4755 /bin/ping"
der normale user "iobroker" darf damit auch ping ausführen
---- robonect Adapter ist grün und Verbindung ist hergestellt -------
-
ich hab das Problem jetzt selbst gelöst.
es liegt nicht an privilegierten oder unprivilegierten CT.
das Problem sind die user rechte.
nur root darf den Befehl Ping ausführen.
also "sudo chmod 4755 /bin/ping"
der normale user "iobroker" darf damit auch ping ausführen
---- robonect Adapter ist grün und Verbindung ist hergestellt -------
-
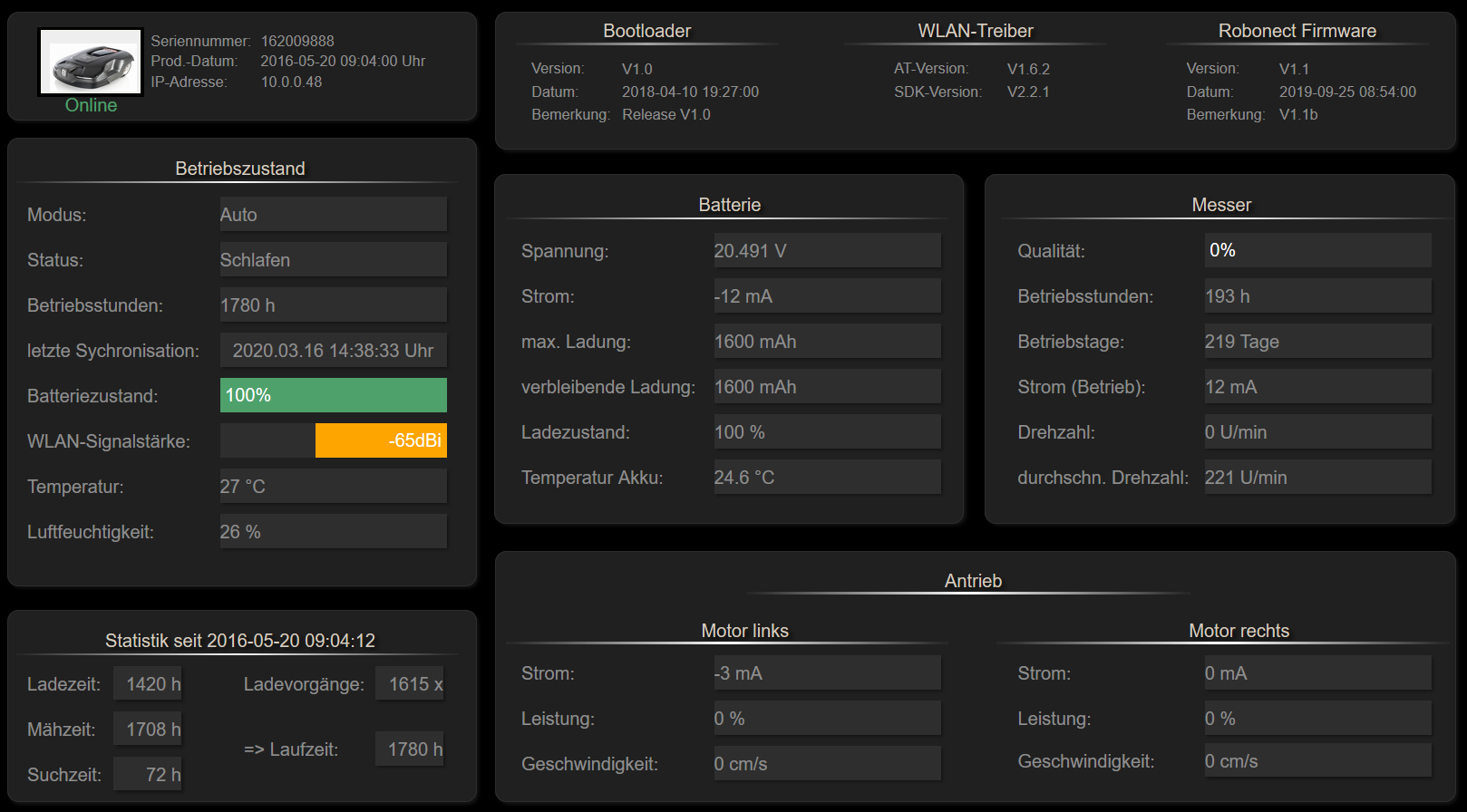
eine Frage hab ich. Unter den Objekten zu den Messern.

Warum ist hier der average größer als current, obwohl der current Wert immer so um die 2800 RPM liegt
Wie wird die berechnet? -
@braindead
bei mir kommt des öfteren "eingesperrt" und es reicht, den Fehler zu quittieren und wieder zu starten, daher die Frage (kann´s aber über das Robonect Online Tool auch erledigen).Hier mal meine bisher geschaffte Vis:
-
@Latzi
hallo,
habe gerade die tolle VIS gesehen
kann dieser view als txt zur Verfügung gestellt werden
danke@markochef
schau mal unter https://forum.iobroker.net/topic/11834/neuer-robonect-hx-adapter/125, da ist´s beschrieben -
Hallo,
mein Mäher läuft nicht jeden Tag und deshalb würde ich gerne den Adapter an den Tagen an denen nicht gemäht wird deaktivieren.
Über den Timer bei den Instanzen kann ich keinen Zeitraum "von-bis" einstellen sondern nur einen in Abständen definierten Start des Adapters. (Falls ich das richtig interpretiere)
Besteht die Möglichkeit Ruhetage in die Einstellungen des Adapters einzubauen?
Gruß
miwi
-
Hallo,
mein Mäher läuft nicht jeden Tag und deshalb würde ich gerne den Adapter an den Tagen an denen nicht gemäht wird deaktivieren.
Über den Timer bei den Instanzen kann ich keinen Zeitraum "von-bis" einstellen sondern nur einen in Abständen definierten Start des Adapters. (Falls ich das richtig interpretiere)
Besteht die Möglichkeit Ruhetage in die Einstellungen des Adapters einzubauen?
Gruß
miwi
Hier ein paar Anregungen, der Trigger dafür kann alles mögliche sein: Cron, Ping, Wetter, etc. :)
Nutze das selbst bei vielen Adaptern, die Instanzen laufen dann nur wenn sie auch benötigt werden.
Proxmox-ioBroker-Redis-HA Doku: https://forum.iobroker.net/topic/47478/dokumentation-einer-proxmox-iobroker-redis-ha-umgebung
-
Hier ein paar Anregungen, der Trigger dafür kann alles mögliche sein: Cron, Ping, Wetter, etc. :)
Nutze das selbst bei vielen Adaptern, die Instanzen laufen dann nur wenn sie auch benötigt werden.
-
Hallo zusammen, ich würde gernen den Timer Töglich um 0 Uhr neu setzen Start Sonnenaufgang + 30 Minuten Ende Sonnenuntergang - 30 Minuten.
Wie kann ich das bewerkstelligen?Hallo zusammen, ich würde gernen über ein Skript den Timer von meinem Rasenmäher mit Robonect Modul setzen
Wenn ich die URI im Browser aufrufe klappt es wie gewünscht. Jetzt habe ich ein JS erstellt und bekomme folgenden Fehler.Request error: Error: Parse Error: Expected HTTP/Wer kann mir helfen.
schedule("0 0 4 * * *", function () { var request = require('request'); var sonnenaufgang = "shuttercontrol.0.info.Sunrise"; var sonnenuntergang = "shuttercontrol.0.info.Sunset"; request('http://ip-vom-mäher/xml?cmd=timer&timer=1&start=06:00&end=22:00&enable=1', function (error, response) { }); }); -
Hallo zusammen, ich würde gernen über ein Skript den Timer von meinem Rasenmäher mit Robonect Modul setzen
Wenn ich die URI im Browser aufrufe klappt es wie gewünscht. Jetzt habe ich ein JS erstellt und bekomme folgenden Fehler.Request error: Error: Parse Error: Expected HTTP/Wer kann mir helfen.
schedule("0 0 4 * * *", function () { var request = require('request'); var sonnenaufgang = "shuttercontrol.0.info.Sunrise"; var sonnenuntergang = "shuttercontrol.0.info.Sunset"; request('http://ip-vom-mäher/xml?cmd=timer&timer=1&start=06:00&end=22:00&enable=1', function (error, response) { }); });Hi, Ich versuche verzweifelt die Timer per VIS (fancyswitch) zu aktivieren und zu deaktivieren. Leider klappt schon das deaktivieren nicht richtig.
Wenn ich mir das Objekt robonect.0.timer.0.enabled anschaue wird das bei betätigen des switch auf false gesetzt, damit hotte ich den timer deaktvieren zu können. Leider wird es nach einiger Zeit jedoch automatisch wieder auf "true" gesetzt. Weshalb ist mir unklar.
Ähnliches passiert wenn ich den robonect.0.status.mode z.B. von Manuell auf "Auto" setze. Das Objekt geht zunächst auf Auto, wechselt aber nach ca 1 Sekunde zurück auf "Manuell".
Hab ich was Generelles übersehen? -
Hi, Ich versuche verzweifelt die Timer per VIS (fancyswitch) zu aktivieren und zu deaktivieren. Leider klappt schon das deaktivieren nicht richtig.
Wenn ich mir das Objekt robonect.0.timer.0.enabled anschaue wird das bei betätigen des switch auf false gesetzt, damit hotte ich den timer deaktvieren zu können. Leider wird es nach einiger Zeit jedoch automatisch wieder auf "true" gesetzt. Weshalb ist mir unklar.
Ähnliches passiert wenn ich den robonect.0.status.mode z.B. von Manuell auf "Auto" setze. Das Objekt geht zunächst auf Auto, wechselt aber nach ca 1 Sekunde zurück auf "Manuell".
Hab ich was Generelles übersehen?@aiouh sagte in Neuer Robonect HX Adapter:
robonect.0.timer.0.enabled
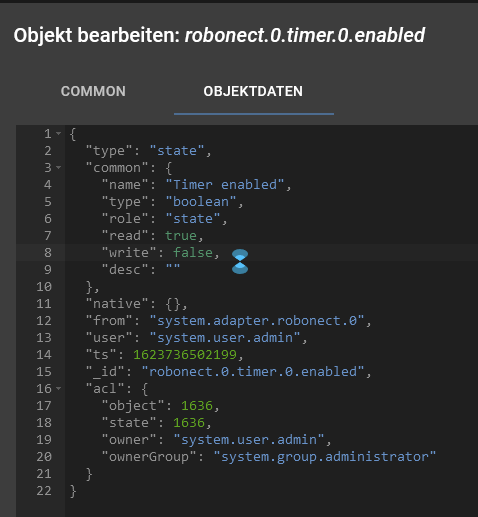
-> Der Adapter kann diese DPs aktuell nicht schreiben / an Robonect senden. Er liest sie nur aus.
-
@aiouh sagte in Neuer Robonect HX Adapter:
robonect.0.timer.0.enabled
-> Der Adapter kann diese DPs aktuell nicht schreiben / an Robonect senden. Er liest sie nur aus.
-
Hallo,
ich bitte um Entschuldigung, wenn ich mich hier mal einklinke. Habe eine Frage zu Robonect. Es gibt dort unter Kommunikation den Punkt Pushservice. Leider ist die Doku dazu recht dürftig. Habe daher versucht, mal einen eigenen Pushserver mit Gotify aufzusetzen. Der läuft jetzt in einer eigenen VM unter Debian.Meine Testconfig für den Pushservice:
Ich kann auch die Meldung sehen, leider wird das in der zugehörigen App nicht angezeigt.
Hat das vielleicht jemand mit einem anderen Pushservice am Laufen?
-
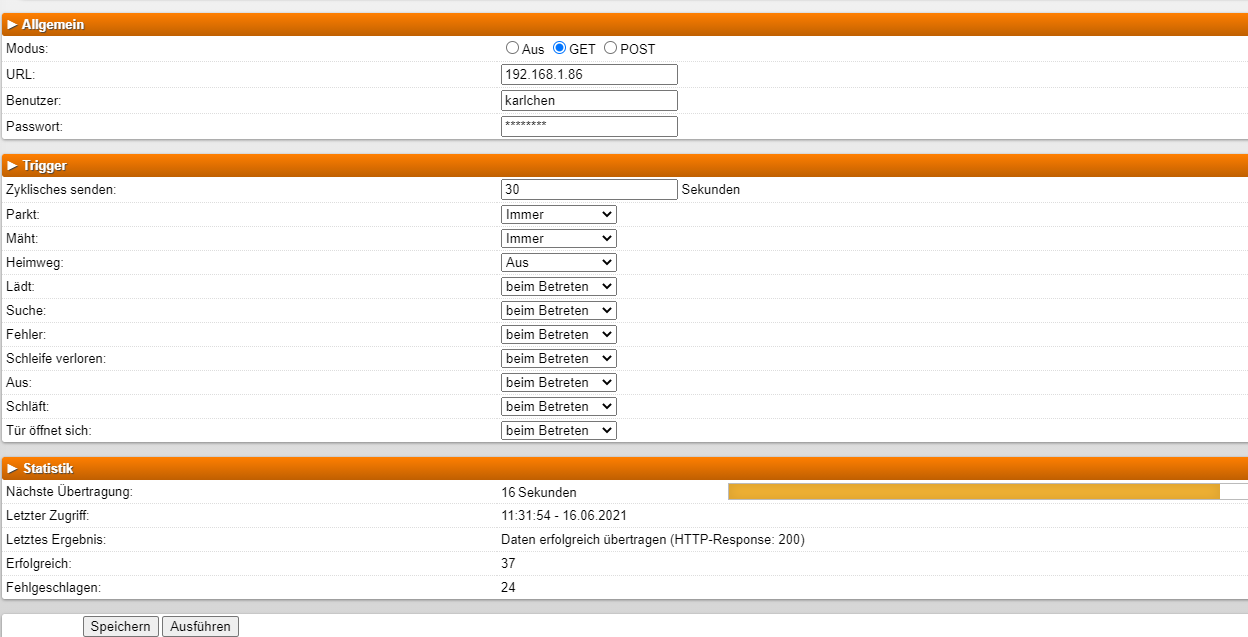
Hallo zusammen, ich würde gernen über ein Skript den Timer von meinem Rasenmäher mit Robonect Modul setzen
Wenn ich die URI im Browser aufrufe klappt es wie gewünscht. Jetzt habe ich ein JS erstellt und bekomme folgenden Fehler.Request error: Error: Parse Error: Expected HTTP/Wer kann mir helfen.
schedule("0 0 4 * * *", function () { var request = require('request'); var sonnenaufgang = "shuttercontrol.0.info.Sunrise"; var sonnenuntergang = "shuttercontrol.0.info.Sunset"; request('http://ip-vom-mäher/xml?cmd=timer&timer=1&start=06:00&end=22:00&enable=1', function (error, response) { }); });@malz1902 sagte in Neuer Robonect HX Adapter:
request('http://ip-vom-mäher/xml?cmd=timer&timer=1&start=06:00&end=22:00&enable=1', function (error, response) { });
Benutzer und Passwort fehlt.
Und zum Schluss fehlt "save"richtig ist:
request('http://192.168.xxx.xx/json?user=xxx&pass=xxx&cmd=timer&timer=1&start=06:00&end=15:00&mo=1&tu=1&enable=1&save=1', function (error, response, body) { if (error) { log('Error: request Fehler!',"error"); } });
Wenn ich helfen konnte, dann Daumen hoch (Pfeil nach oben)!
Danke.
gute Forenbeiträge: https://forum.iobroker.net/topic/51555/hinweise-f%C3%BCr-gute-forenbeitr%C3%A4ge
ScreenToGif :https://www.screentogif.com/downloads.html
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden426
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge