

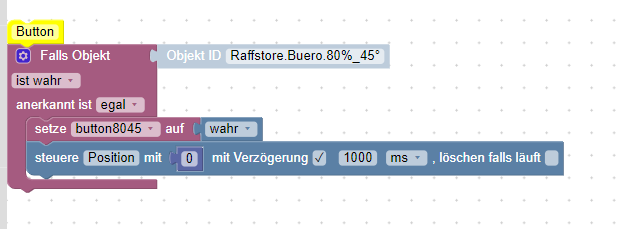
Ausführung für z.B. 1 Sekunde
-
@LaBamba sagte:
die fahrtrichtung muss immer von oben sein sonst sind die winkel unterschiedlich
Vielleicht so in der Reihenfolge Open --> Close --> Pause ?
@paul53 said in Ausführung für z.B. 1 Sekunde:
@LaBamba sagte:
die fahrtrichtung muss immer von oben sein sonst sind die winkel unterschiedlich
Vielleicht so in der Reihenfolge Open --> Close --> Pause ?
Ich habe es jetzt mal so ausprobiert.
Fahrt nach unten: Nach dem Herunterfahren in die Position 80% drehen sich die Lamellen nicht. Der Fahrbefehl ist nochmal 600 ms in Fahrtrichtung unten und nicht 600 ms gegen die Fahrtrichtung (also oben) um den Winkel einzustellen!
Fahrt nach oben: Nach dem Hochfahren in die Position 80% drehen sich die Lamellen nicht. Der Fahrbefehl ist nochmal 600 ms in Fahrtrichtung oben und nicht 600 ms gegen die Fahrtrichtung für die Lamelleneinstellung(also oben)! Anschließend wird im Sekundentakt immer wieder anscheinend 600ms nach oben gefahren mit einer Pause von 1 Sekunde dazwischen. -
@paul53 said in Ausführung für z.B. 1 Sekunde:
@LaBamba sagte:
die fahrtrichtung muss immer von oben sein sonst sind die winkel unterschiedlich
Vielleicht so in der Reihenfolge Open --> Close --> Pause ?
Ich habe es jetzt mal so ausprobiert.
Fahrt nach unten: Nach dem Herunterfahren in die Position 80% drehen sich die Lamellen nicht. Der Fahrbefehl ist nochmal 600 ms in Fahrtrichtung unten und nicht 600 ms gegen die Fahrtrichtung (also oben) um den Winkel einzustellen!
Fahrt nach oben: Nach dem Hochfahren in die Position 80% drehen sich die Lamellen nicht. Der Fahrbefehl ist nochmal 600 ms in Fahrtrichtung oben und nicht 600 ms gegen die Fahrtrichtung für die Lamelleneinstellung(also oben)! Anschließend wird im Sekundentakt immer wieder anscheinend 600ms nach oben gefahren mit einer Pause von 1 Sekunde dazwischen.@LaBamba sagte:
Ich habe es jetzt mal so ausprobiert.
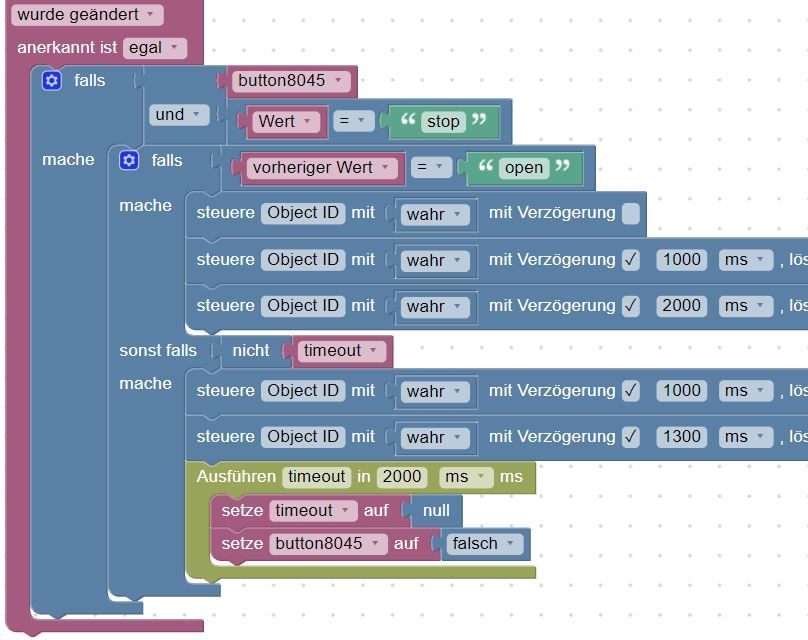
So funktioniert es wohl nicht.
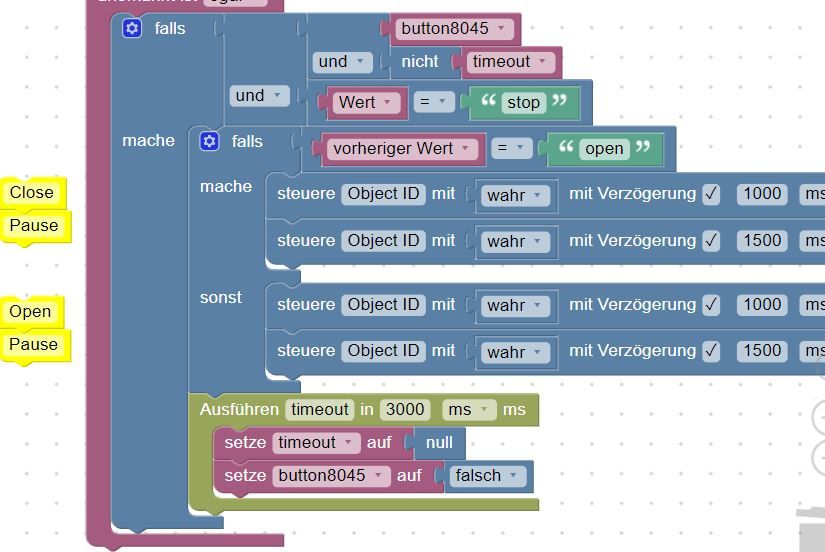
Beim Öffnen: vorheriger Wert = "open":
- Open: weiterfahren
- Close: zurückfahren
- Pause: anhalten
Danach oder falls schließt:
- Open: zurück
- Pause: x00 ms nach zurück = Drehen
-
@LaBamba sagte:
Ich habe es jetzt mal so ausprobiert.
So funktioniert es wohl nicht.
Beim Öffnen: vorheriger Wert = "open":
- Open: weiterfahren
- Close: zurückfahren
- Pause: anhalten
Danach oder falls schließt:
- Open: zurück
- Pause: x00 ms nach zurück = Drehen
-
@LaBamba sagte:
Ich habe es jetzt mal so ausprobiert.
So funktioniert es wohl nicht.
Beim Öffnen: vorheriger Wert = "open":
- Open: weiterfahren
- Close: zurückfahren
- Pause: anhalten
Danach oder falls schließt:
- Open: zurück
- Pause: x00 ms nach zurück = Drehen
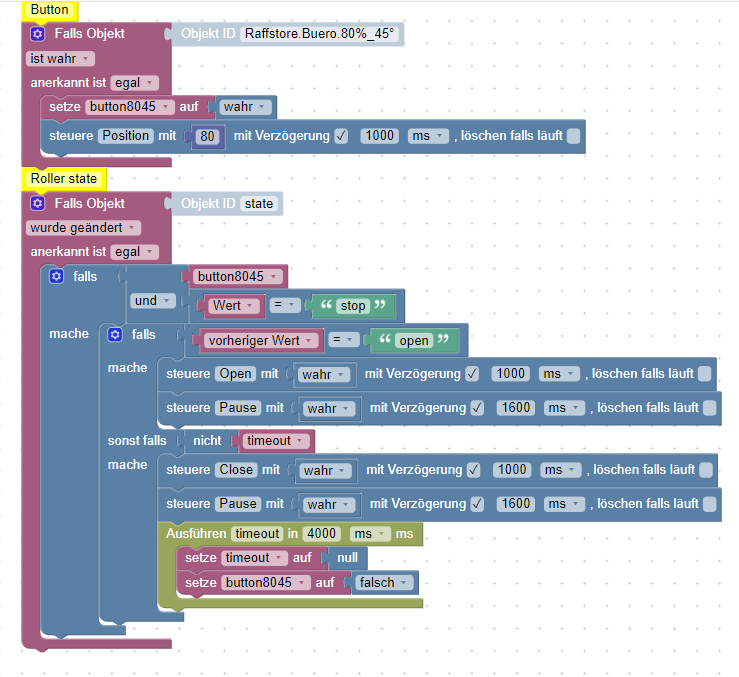
@paul53
Leider hat dein Skript nicht nach oben funktioniert. Beim nach oben fahren hat er die Raffstores gar nicht gedreht und ist drei kurze Rucker nach oben weitergefahren. Meine voriger Wert oben lässt den Raffstore nochmal anfahren. Zudem braucht man die Pause sonst werden die Werte zu schnell abgerufen.
So jetzt habe ich das Skript mal eingegeben. Nach unten funktioniert es super!
Nach oben fährt er auf 80% und fährt anschließend nochmal ca. 0,5 Sekunden nach oben, und dreht dann den Winkel.
Die nochmaligen 0,5 Sekunden nach oben verstehe ich nicht. Diese werden ja auch nicht gebraucht. -
@paul53
Leider hat dein Skript nicht nach oben funktioniert. Beim nach oben fahren hat er die Raffstores gar nicht gedreht und ist drei kurze Rucker nach oben weitergefahren. Meine voriger Wert oben lässt den Raffstore nochmal anfahren. Zudem braucht man die Pause sonst werden die Werte zu schnell abgerufen.
So jetzt habe ich das Skript mal eingegeben. Nach unten funktioniert es super!
Nach oben fährt er auf 80% und fährt anschließend nochmal ca. 0,5 Sekunden nach oben, und dreht dann den Winkel.
Die nochmaligen 0,5 Sekunden nach oben verstehe ich nicht. Diese werden ja auch nicht gebraucht.@LaBamba sagte:
Die nochmaligen 0,5 Sekunden nach oben verstehe ich nicht. Diese werden ja auch nicht gebraucht.
Dann lass sie weg. Ich habe keine solchen Aktoren, kann also nicht testen, wie sie auf welche zeitlichen Abläufe reagieren.
Du hattest geschrieben, dass man den Winkel nur drehen kann, nachdem nach unten gefahren wurde. Das habe ich versucht umzusetzen. Ist es wirklich so, dass nach Aufwärtsfahrt der Winkel nicht gedreht werden kann ? -
@LaBamba sagte:
Die nochmaligen 0,5 Sekunden nach oben verstehe ich nicht. Diese werden ja auch nicht gebraucht.
Dann lass sie weg. Ich habe keine solchen Aktoren, kann also nicht testen, wie sie auf welche zeitlichen Abläufe reagieren.
Du hattest geschrieben, dass man den Winkel nur drehen kann, nachdem nach unten gefahren wurde. Das habe ich versucht umzusetzen. Ist es wirklich so, dass nach Aufwärtsfahrt der Winkel nicht gedreht werden kann ?@paul53
Dann haben wir uns falsch verstanden. Ich hätte es so umgesetzt da die Zeiten dann immer gleich sind für den drehwinkel.
Grundsätzlich funktioniert es ja.
Jedoch eine interessante Entdeckung habe ich noch gemacht. Wenn ich von 0% geschlossen nach 70% 45 Grad fahren will, bricht er bei 50% ab und spielt total verrückt.
Ist hier irgendeine Zeitliche Begrenzung für den ersten befehl der Position drin. Scheint nur vorzukommen wenn die Fahrstrecke größer 50% -
@paul53
Dann haben wir uns falsch verstanden. Ich hätte es so umgesetzt da die Zeiten dann immer gleich sind für den drehwinkel.
Grundsätzlich funktioniert es ja.
Jedoch eine interessante Entdeckung habe ich noch gemacht. Wenn ich von 0% geschlossen nach 70% 45 Grad fahren will, bricht er bei 50% ab und spielt total verrückt.
Ist hier irgendeine Zeitliche Begrenzung für den ersten befehl der Position drin. Scheint nur vorzukommen wenn die Fahrstrecke größer 50%@LaBamba sagte:
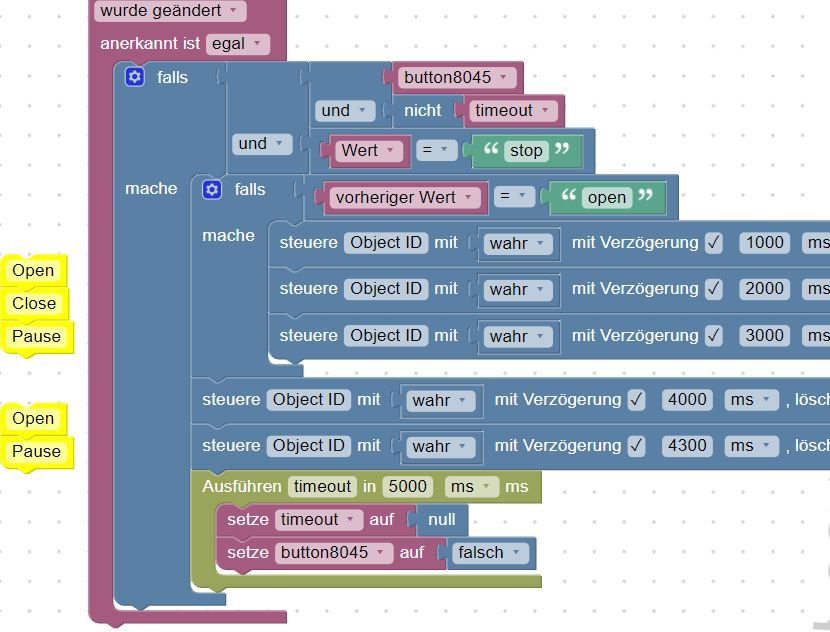
Dann haben wir uns falsch verstanden. Ich hätte es so umgesetzt da die Zeiten dann immer gleich sind für den drehwinkel.
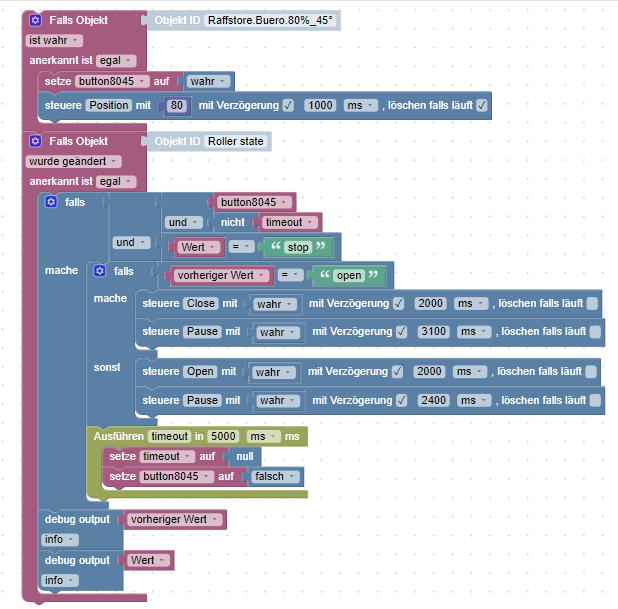
Dann versuche es mal so, wobei die Zeitdifferenzen (zurück --> Pause) dann wahrscheinlich je nach Richtung unterschiedlich sind.
-
@LaBamba sagte:
Dann haben wir uns falsch verstanden. Ich hätte es so umgesetzt da die Zeiten dann immer gleich sind für den drehwinkel.
Dann versuche es mal so, wobei die Zeitdifferenzen (zurück --> Pause) dann wahrscheinlich je nach Richtung unterschiedlich sind.
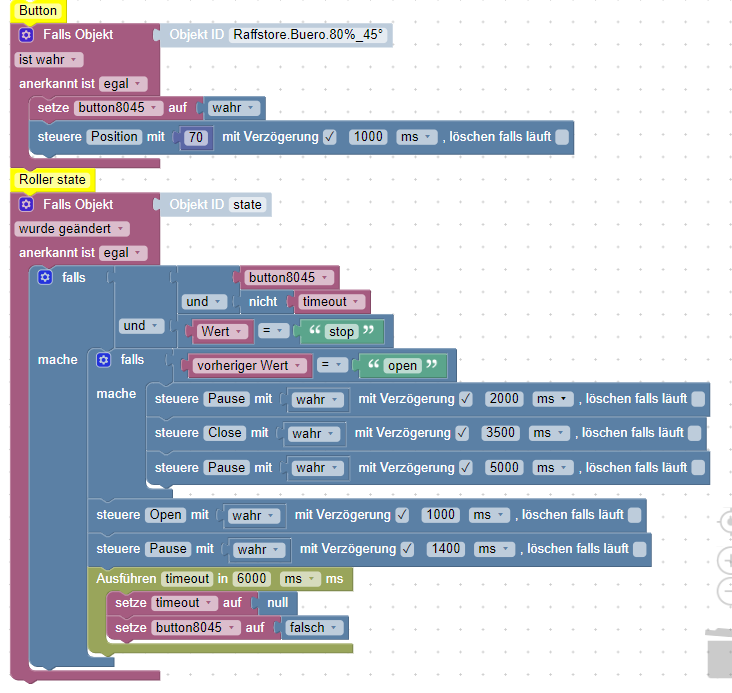
@paul53
Funktioniert besser!
Jedoch habe ich immer noch das Problem, dass bei Fahrstrecken über 50 % abgebrochen wird und das System verrückt spielt.
Ich habe eine Vermutung woran das liegt.
In der Position der Shelly wird direkt bei auslösen des Befehl als Position 70 geschrieben.
Da ich weiß dass es mit http befehlen geht, wäre dies vielleicht einen Versuch wert.
Kann ich die blaue Position mit einem HTTP Befehl realisieren? oder ist das im Skript nicht möglich?Wenn ich direkt in den Objekten Position 100 für die Shelly eintrage dann fährt er ohne Probleme von 0 nach 100.
-
@paul53
Funktioniert besser!
Jedoch habe ich immer noch das Problem, dass bei Fahrstrecken über 50 % abgebrochen wird und das System verrückt spielt.
Ich habe eine Vermutung woran das liegt.
In der Position der Shelly wird direkt bei auslösen des Befehl als Position 70 geschrieben.
Da ich weiß dass es mit http befehlen geht, wäre dies vielleicht einen Versuch wert.
Kann ich die blaue Position mit einem HTTP Befehl realisieren? oder ist das im Skript nicht möglich?Wenn ich direkt in den Objekten Position 100 für die Shelly eintrage dann fährt er ohne Probleme von 0 nach 100.
@LaBamba said in Ausführung für z.B. 1 Sekunde:
@paul53
Funktioniert besser!
Jedoch habe ich immer noch das Problem, dass bei Fahrstrecken über 50 % abgebrochen wird und das System verrückt spielt.
Ich habe eine Vermutung woran das liegt.
In der Position der Shelly wird direkt bei auslösen des Befehl als Position 70 geschrieben.
Da ich weiß dass es mit http befehlen geht, wäre dies vielleicht einen Versuch wert.
Kann ich die blaue Position mit einem HTTP Befehl realisieren?Oder kann dies an einer timeout liegen?
-
@LaBamba said in Ausführung für z.B. 1 Sekunde:
@paul53
Funktioniert besser!
Jedoch habe ich immer noch das Problem, dass bei Fahrstrecken über 50 % abgebrochen wird und das System verrückt spielt.
Ich habe eine Vermutung woran das liegt.
In der Position der Shelly wird direkt bei auslösen des Befehl als Position 70 geschrieben.
Da ich weiß dass es mit http befehlen geht, wäre dies vielleicht einen Versuch wert.
Kann ich die blaue Position mit einem HTTP Befehl realisieren?Oder kann dies an einer timeout liegen?
-
@LaBamba sagte:
dass bei Fahrstrecken über 50 % abgebrochen wird und das System verrückt spielt.
Wird dann zwischendurch gestoppt ? Ein Log (Debug-Block) würde Auskunft geben.
-
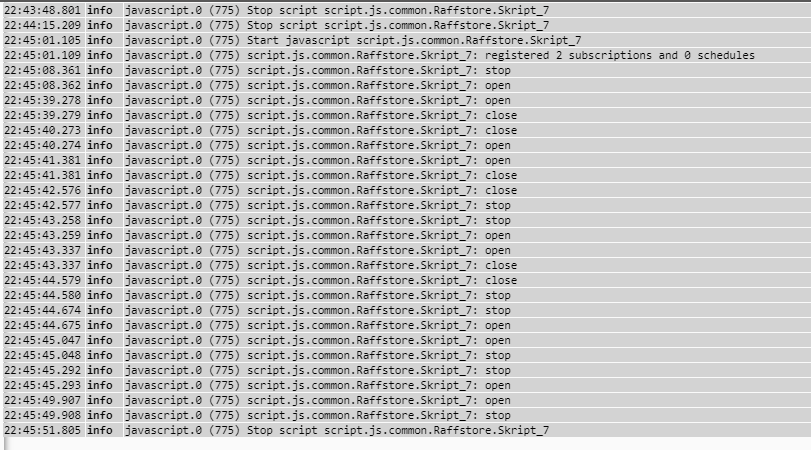
@LaBamba
Zu Anfang wechseln sich "open" und "close" in ca. 1 s Abstand ohne "stop" dazwischen ab. Das kann eigentlich nicht aus dem Script kommen, denn so kurze Zeitabstände sind dort nicht enthalten. -
@LaBamba
Zu Anfang wechseln sich "open" und "close" in ca. 1 s Abstand ohne "stop" dazwischen ab. Das kann eigentlich nicht aus dem Script kommen, denn so kurze Zeitabstände sind dort nicht enthalten.@paul53
Sorry, die letzte Woche war Stress pur.
Ich konnte jetzt ein wenig das Skript testen. Zuvor hatte ich die Shelly für den Raffstore nochmals neu kalibriert,
Erst hatte ich die letzte Variante getestet.
von 100 % auf 80% und dann der Winkel hat super funktioniert.
von 0 % auf 80% und dann der Winkel, fängt das System bei ca. 48-50% das spinnen an.Folglich habe ich mir gedacht, ich überprüfe dies mit unseren einfachen Skript.
von 100 % auf 80% und dann der Winkel hat super funktioniert.
von 100 % auf 0% und dann der Winkel, fängt das System bei ca. 48-50% das spinnen an.
Das hatte ich damals auch nicht getestet.Somit scheint es aus meiner Sicht hier irgendeine zeitliche Begrenzung vorzuliegen.

Ändere ich den Wert bei Position, von 100% auf 0% fährt der Raffstore zu. Genauso funktioniert es von 0% auf 100% andersrum.
Es springt immer genau nach 48% von close auf open und bei 52% von open auf close. Folglich scheint es zeitabhängig zu sein.
Weiter zur Fehlersuche
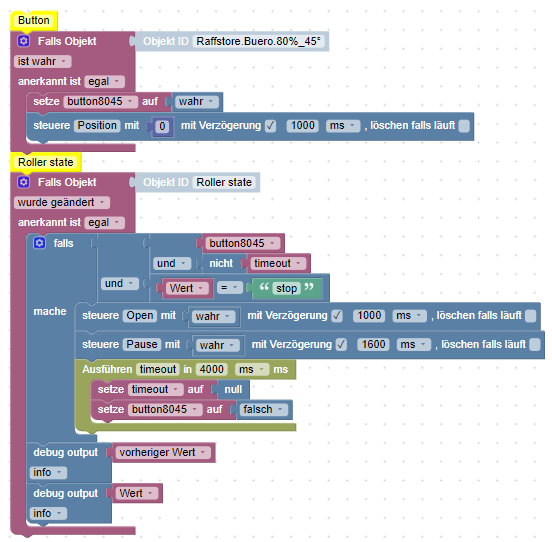
Ich habe jetzt nur den oben Teil des Skriptes getestet. Hier scheint der Fehler zu sein. Denn auch nur mit diesem Teil wird die Fahrt bei 48% oder 52% abgebrochen.
Kann es sein, das der Button nach einer gewissen Zeit wechselt? -
@paul53
Sorry, die letzte Woche war Stress pur.
Ich konnte jetzt ein wenig das Skript testen. Zuvor hatte ich die Shelly für den Raffstore nochmals neu kalibriert,
Erst hatte ich die letzte Variante getestet.
von 100 % auf 80% und dann der Winkel hat super funktioniert.
von 0 % auf 80% und dann der Winkel, fängt das System bei ca. 48-50% das spinnen an.Folglich habe ich mir gedacht, ich überprüfe dies mit unseren einfachen Skript.
von 100 % auf 80% und dann der Winkel hat super funktioniert.
von 100 % auf 0% und dann der Winkel, fängt das System bei ca. 48-50% das spinnen an.
Das hatte ich damals auch nicht getestet.Somit scheint es aus meiner Sicht hier irgendeine zeitliche Begrenzung vorzuliegen.
Ändere ich den Wert bei Position, von 100% auf 0% fährt der Raffstore zu. Genauso funktioniert es von 0% auf 100% andersrum.
Es springt immer genau nach 48% von close auf open und bei 52% von open auf close. Folglich scheint es zeitabhängig zu sein.
Weiter zur Fehlersuche
Ich habe jetzt nur den oben Teil des Skriptes getestet. Hier scheint der Fehler zu sein. Denn auch nur mit diesem Teil wird die Fahrt bei 48% oder 52% abgebrochen.
Kann es sein, das der Button nach einer gewissen Zeit wechselt?@LaBamba
Hallo,
da ich vor der gleichen Aufgabe stehe wollte ich mal bei dir nachfragen ob dein Skript jetzt fehlerfrei läuft.
Würdest du es evtl auch zur Verfügung stellen?Gruß Stephan
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
211
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge