- ioBroker Community Home
- Deutsch
- ioBroker Allgemein
- [Frage] Xiaomi Vacuum cleaner


[Frage] Xiaomi Vacuum cleaner
-
@Brati Ja, der Roboter wird geflasht und gerootet, aber das ist denke ich nicht das Problem.
Ich habe es hinbekommen über meinen ioBroker einen PUT Befehl an den Roboter zu senden um die Zonen Reinigung zu starten.
curl -X PUT -H 'Content-Type: application/json' -d '[25639,22893,26539,23672,1]' http://IP-Roboter/api/start_cleaning_zoneNun habe ich aber folgendes Problem, obwohl ich ihm im Befehl die gleichen Koordinaten übergebe wie sie auch auf dem Roboter unter der entsprechenden Zone gespeichert sind, macht er nichts....Bzw fährt nur ein halben Meter nach vorne um direkt wieder an die Station zu fahren.
Starte ich die Zonen Reinigung jedoch über das Valetudo Webinterface funktioniert alles problemlos.
Es muss doch irgendwie machbar sein das ich dem Roboter sagen kann er soll eine bestimmte Zone reinigen ohne das Webinterface aufzurufen.
Ich würde das gerne in meine VIS mit einbinden damich alles über mein Tablet bedienen kann.
Hat sich noch keiner mit Valetudo befasst und hat evtl. einen Tipp oder eine Idee?
@Leviathan09
Bist du hiermit weiter gekommen?Ich have Valetudo installiert und starte die Zonenreinigung über den Adapter mittels der koordinaten.
Der Robbi fährt eine Ehrenrunde und dann wieder nach Hause. Die Zone wird in der WebGUI auch
richtig angezeigt. Wenn ich die selben Koordinaten über die WebGUI starte, funktioniert es. Nur "entfernt"
eben nicht. Daher bin ich nun auf der Suche nach einen Valetudo API Call.Siehe auch: https://forum.iobroker.net/topic/4537/frage-xiaomi-vacuum-cleaner/2159
VG!
-
Mein Gen1 lädt irgendwie keine map mehr. Kann mich am Xiaomi server anmelden und der Sauger wird auch gefunden aber die map wird nicht mehr geladen.
EDIT: Betritt den mihome-vacuum adapter. Hab mal im richtigen Bereich gepostet.
-
@Leviathan09
Bist du hiermit weiter gekommen?Ich have Valetudo installiert und starte die Zonenreinigung über den Adapter mittels der koordinaten.
Der Robbi fährt eine Ehrenrunde und dann wieder nach Hause. Die Zone wird in der WebGUI auch
richtig angezeigt. Wenn ich die selben Koordinaten über die WebGUI starte, funktioniert es. Nur "entfernt"
eben nicht. Daher bin ich nun auf der Suche nach einen Valetudo API Call.Siehe auch: https://forum.iobroker.net/topic/4537/frage-xiaomi-vacuum-cleaner/2159
VG!
@ntsa86 das Problem hatte ich auch. Valetudu zeigt die y-Koordinaten in die falsche Richtung an.
Valetudo x1,y1,x2,y2 muss zu x1,51000-y2,x2,51000-y1 werden.Also die y Werte von 51000 abziehen und y1/y2 austauschen, so das y1 immer der niedrigere Wert ist.
Raspberrymatic, Homematic & Homematic IP Aktoren, ioBroker auf NUC i3, Nuki, Harmony Hub, Digitalstrom, Diverse Sonoff (Tasmota) und Shellies
-
@ntsa86 nein, wurde es nicht. Ich löse das Problem in dem ich nur noch Zonenreinigungen anstosse. Auch für eine Komplettreinigung!
Das funktioniert sehr gut und in Verbindung mit einer VIS auch gut steuerbar.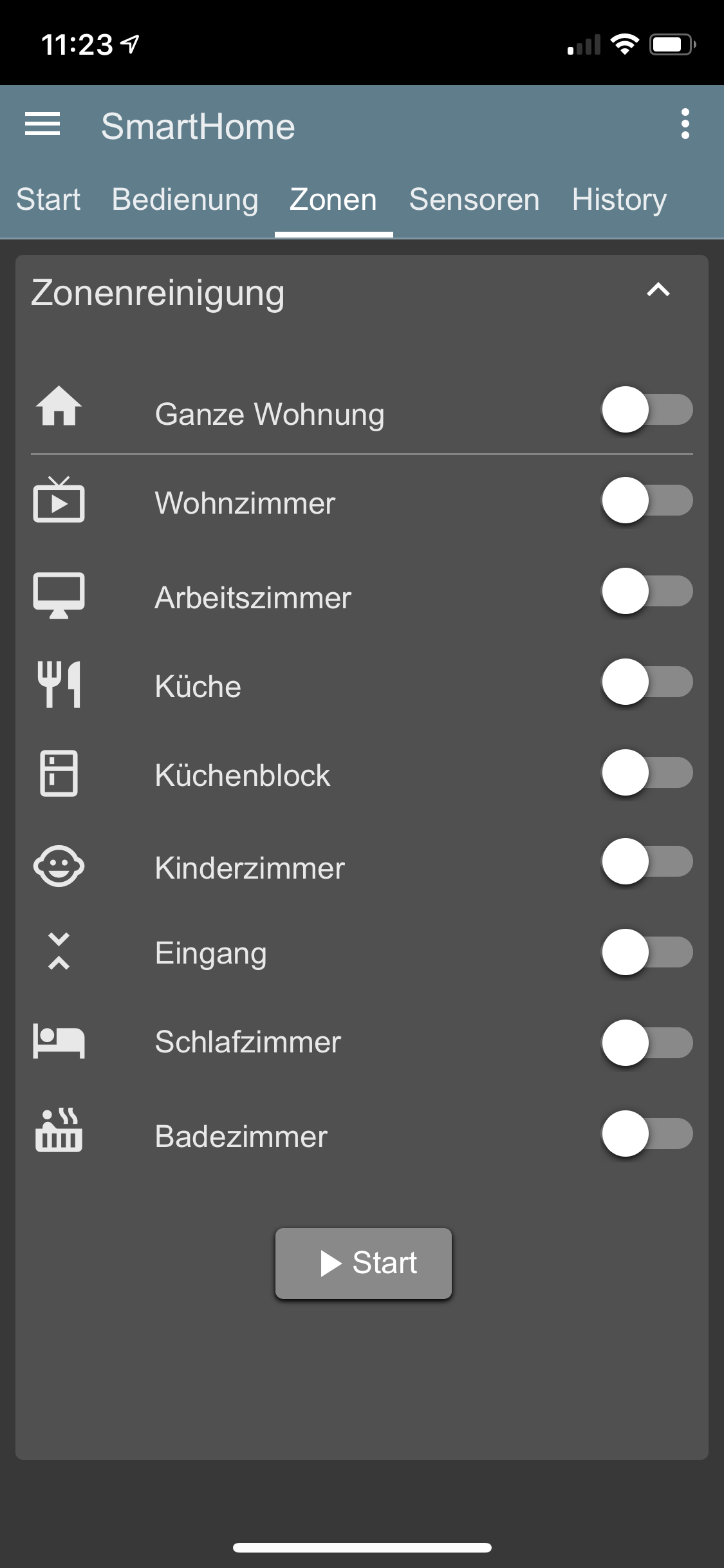
-
@ntsa86 nein, wurde es nicht. Ich löse das Problem in dem ich nur noch Zonenreinigungen anstosse. Auch für eine Komplettreinigung!
Das funktioniert sehr gut und in Verbindung mit einer VIS auch gut steuerbar.@der-eine sagte in [Frage] Xiaomi Vacuum cleaner:
@ntsa86 nein, wurde es nicht. Ich löse das Problem in dem ich nur noch Zonenreinigungen anstosse. Auch für eine Komplettreinigung!
Das funktioniert sehr gut und in Verbindung mit einer VIS auch gut steuerbar.Was ist das für eine coole VIS?
-
Könntest du vlt dein Skript hier posten? Würde es gerne so wie du umsetzen.
Danke und Gruß,
Seppel@seppel786 klar

<xml xmlns="http://www.w3.org/1999/xhtml"> <variables> <variable type="" id="H5jM!d-6fer30oMoMTOL">Wohnzimmer</variable> <variable type="" id="-M/PPIWr7NY[r%Jw1vXb">Arbeitszimmer</variable> <variable type="" id=":%U|iH-0aK@J*xqmm2$s">Kueche</variable> <variable type="" id="qlPh|Kcns,Le0OjrSr~Q">Kuechenblock</variable> <variable type="" id="TWx.F5)_#a0_W/gb6CbH">Kinderzimmer</variable> <variable type="" id="%D}S:Ibzy1[a1-6)Yk}K">Schlafzimmer</variable> <variable type="" id="![*U^yoiQy}#OpB-KNZZ">Badezimmer1</variable> <variable type="" id="W5^D4IEYa#}p]qmSx3tw">Badezimmer2</variable> <variable type="" id="pS)E,EGzvESC,L}rBk/X">Eingang</variable> <variable type="" id="?338$LOCRmXqk%RE}N95">Zone</variable> <variable type="undefined" id="timeout4">timeout4</variable> <variable type="undefined" id="timeout">timeout</variable> <variable type="undefined" id="timeout2">timeout2</variable> <variable type="undefined" id="timeout3">timeout3</variable> </variables> <block type="variables_set" id="%oE/KUz@)En!^j{~$d-9" x="-1038" y="-1362"> <field name="VAR" id="H5jM!d-6fer30oMoMTOL" variabletype="">Wohnzimmer</field> <value name="VALUE"> <block type="text" id="Eg-alu,H4WSal,1P[?qe"> <field name="TEXT">[18190,27121,21540,32571,1],</field> </block> </value> <next> <block type="variables_set" id="gQ$iEL?YpEgmPAT$2^Uw"> <field name="VAR" id="-M/PPIWr7NY[r%Jw1vXb" variabletype="">Arbeitszimmer</field> <value name="VALUE"> <block type="text" id="oI2l*9_~qVjEOhn@i=Se"> <field name="TEXT">[19549,24651,21999,26801,1],</field> </block> </value> <next> <block type="variables_set" id="kKkRwrSMU.Z~iSW8^@%"> <field name="VAR" id=":%U|iH-0aK@J*xqmm2$s" variabletype="">Kueche</field> <value name="VALUE"> <block type="text" id="tHGu}ud|Eg2pTbQfId[;"> <field name="TEXT">[21973,25137,25673,28787,1],</field> </block> </value> <next> <block type="variables_set" id="Kbh`mAowWKN8Q+,w=+Ws"> <field name="VAR" id="qlPh|Kcns,Le0OjrSr~Q" variabletype="">Kuechenblock</field> <value name="VALUE"> <block type="text" id="@~f97r;QUO-?:G^OvMUs"> <field name="TEXT">[22395,25132,25545,26382,1],</field> </block> </value> <next> <block type="variables_set" id="y,ZY}6:X2v=aKFrS@d/3"> <field name="VAR" id="TWx.F5)_#a0_W/gb6CbH" variabletype="">Kinderzimmer</field> <value name="VALUE"> <block type="text" id="RAjw@mt+(M}NB9%q[2M#"> <field name="TEXT">[26124,26337,30324,27787,1],</field> </block> </value> <next> <block type="variables_set" id="F33[^H/7@s[mB!qvTc6"> <field name="VAR" id="%D}S:Ibzy1[a1-6)Yk}K" variabletype="">Schlafzimmer</field> <value name="VALUE"> <block type="text" id="5X#Jsw{5.KC;X@cxTBXB"> <field name="TEXT">[26433,29138,29983,30638,1],</field> </block> </value> <next> <block type="variables_set" id="RImUWh7f5JSa?aZjNtAr"> <field name="VAR" id="![*U^yoiQy}#OpB-KNZZ" variabletype="">Badezimmer1</field> <value name="VALUE"> <block type="text" id="z=Ek=|Z+De!+k?r^j9!"> <field name="TEXT">[23887,31211,25037,32411,1],</field> </block> </value> <next> <block type="variables_set" id="7qBj+3{HkC,O5~:5%{y!"> <field name="VAR" id="W5^D4IEYa#}p]qmSx3tw" variabletype="">Badezimmer2</field> <value name="VALUE"> <block type="text" id="tWwo;1^rj?{#6RhMN:3N"> <field name="TEXT">[22872,29403,25222,31153,1],</field> </block> </value> <next> <block type="variables_set" id="ZP1(0{)xe77z-e/:5+oA"> <field name="VAR" id="pS)E,EGzvESC,L}rBk/X" variabletype="">Eingang</field> <value name="VALUE"> <block type="text" id="G2jNrNEQ~^71RKWaEMkw"> <field name="TEXT">[25295,26623,26545,33023,1],</field> </block> </value> <next> <block type="on_ext" id="9%cGN%K[S:G}-wS$A|Bu"> <mutation items="3"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="W%LzaIj?%a$/0/Dhe*$1"> <field name="oid">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </shadow> </value> <value name="OID1"> <shadow type="field_oid" id="l:SF_dE*=N4XW]ArE*sD"> <field name="oid">Eigene_Datenpunkte.0.Staubsauger.Start.Zonenreinigung</field> </shadow> </value> <value name="OID2"> <shadow type="field_oid" id=",T6#Bq}B]^R)8WFz:Yv,"> <field name="oid">mihome-vacuum.0.info.state</field> </shadow> </value> <statement name="STATEMENT"> <block type="comment" id="5kjL#rX*Rl[8}t#.${!/"> <field name="COMMENT">Ganze Wohnung</field> <next> <block type="controls_if" id="jb:KM_s)2j8xp?Z%^TRP"> <value name="IF0"> <block type="logic_compare" id="p6A^J)j13Wt9GwjxUOjM"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id=")1gV4BAawM[{:Oj]a8?L"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="hpYz!0H`tW*Lrg;tS,[T"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> <statement name="DO0"> <block type="variables_set" id="Ym|AFVzY#e3R-}f`R}4;"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> <value name="VALUE"> <block type="text_join" id="kQZt^uCb=9XRDFy|L.fy"> <mutation items="5"></mutation> <value name="ADD0"> <block type="variables_get" id=".8^[-Dsd#=qP]4c3uIK@"> <field name="VAR" id="H5jM!d-6fer30oMoMTOL" variabletype="">Wohnzimmer</field> </block> </value> <value name="ADD1"> <block type="variables_get" id="US8G{za9xEH5nZg8X]PO"> <field name="VAR" id="-M/PPIWr7NY[r%Jw1vXb" variabletype="">Arbeitszimmer</field> </block> </value> <value name="ADD2"> <block type="variables_get" id="L0rr%p~Ol]~=TXM;E|]l"> <field name="VAR" id=":%U|iH-0aK@J*xqmm2$s" variabletype="">Kueche</field> </block> </value> <value name="ADD3"> <block type="variables_get" id=";EBlY#-lyW,BPV^%SZ)S"> <field name="VAR" id="TWx.F5)_#a0_W/gb6CbH" variabletype="">Kinderzimmer</field> </block> </value> <value name="ADD4"> <block type="variables_get" id="YkPmb)#c+xo^S5Tt*YQ$"> <field name="VAR" id="%D}S:Ibzy1[a1-6)Yk}K" variabletype="">Schlafzimmer</field> </block> </value> </block> </value> <next> <block type="timeouts_cleartimeout" id="zh@}ABz[+;/}gvI/Kw`b"> <field name="NAME">timeout4</field> <next> <block type="timeouts_settimeout" id="#tsJk0`/]~#g#-3yq:rs"> <field name="NAME">timeout4</field> <field name="DELAY">60</field> <field name="UNIT">min</field> <statement name="STATEMENT"> <block type="controls_if" id="CSBz`9fg*lsZcF_GXg7+"> <value name="IF0"> <block type="logic_compare" id="fEG7Z^p!wP8K7tj7/sr8"> <field name="OP">NEQ</field> <value name="A"> <block type="get_value" id="lGSHj@5Q*}e=`En.t.lj"> <field name="ATTR">val</field> <field name="OID">mihome-vacuum.0.info.state</field> </block> </value> <value name="B"> <block type="math_number" id="PW]6-]JoIOVB,DLj8#bx"> <field name="NUM">8</field> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="~nB:rxVzUvX8QpmlO]5t"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.pause</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="G(7d!Xng8#aMV]OHanzb"> <field name="BOOL">TRUE</field> </block> </value> </block> </statement> </block> </statement> <next> <block type="control" id="-ZB_LlS~QC-q{c^:}e$H"> <mutation delay_input="true"></mutation> <field name="OID">mihome-vacuum.0.control.zoneClean</field> <field name="WITH_DELAY">TRUE</field> <field name="DELAY_MS">2000</field> <field name="UNIT">ms</field> <field name="CLEAR_RUNNING">FALSE</field> <value name="VALUE"> <block type="text_getSubstring" id="SoSk(7CqUhz`ZyLGzQqq"> <mutation at1="false" at2="true"></mutation> <field name="WHERE1">FIRST</field> <field name="WHERE2">FROM_END</field> <value name="STRING"> <block type="variables_get" id="3n4R/lu:muWx+8H!/CBL"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> </block> </value> <value name="AT2"> <block type="math_number" id="cW%h]Kj1]K5|wsAeyxUJ"> <field name="NUM">2</field> </block> </value> </block> </value> </block> </next> </block> </next> </block> </next> </block> </statement> <next> <block type="controls_if" id="_![^=ag,PI?f4M`f4]%L"> <value name="IF0"> <block type="logic_operation" id=")Mse50nCFm}LN+ACgs(D"> <field name="OP">AND</field> <value name="A"> <block type="logic_compare" id="IB?J{(4i[MyXizL3?1-V"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="y5#Y:xO.720)ZouQJ__0"> <field name="ATTR">val</field> <field name="OID">mihome-vacuum.0.info.state</field> </block> </value> <value name="B"> <block type="math_number" id="B}X[*vc9qqa:|~nk8[k)"> <field name="NUM">6</field> </block> </value> </block> </value> <value name="B"> <block type="logic_compare" id="|Aqyn-?`=Qc)t+mRa,4{"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="o/C;twO{!UnuU?1Z1Euj"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="#t*pyH.@+xDow#IveEUa"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="N%]!(6:oYcTcGN;fx3]!"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.pause</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="VNVr.jFS#Z|R@!FtAzEA"> <field name="BOOL">TRUE</field> </block> </value> <next> <block type="variables_set" id="oo%SmC!8sb7OaZZ[,GbZ"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> <value name="VALUE"> <block type="text_join" id="A.fG#U%z@Q}i|p%a=6;U"> <mutation items="3"></mutation> <value name="ADD0"> <block type="variables_get" id="sBA9mE0d:a+0k(`SM-)."> <field name="VAR" id="![*U^yoiQy}#OpB-KNZZ" variabletype="">Badezimmer1</field> </block> </value> <value name="ADD1"> <block type="variables_get" id="b%WHc33pnf+e=w|dnPY?"> <field name="VAR" id="W5^D4IEYa#}p]qmSx3tw" variabletype="">Badezimmer2</field> </block> </value> <value name="ADD2"> <block type="variables_get" id="S|{E4[92t3T(p(Tba(lQ"> <field name="VAR" id="pS)E,EGzvESC,L}rBk/X" variabletype="">Eingang</field> </block> </value> </block> </value> <next> <block type="control" id="X5=x+qn*E$l2f6b55unk"> <mutation delay_input="true"></mutation> <field name="OID">mihome-vacuum.0.control.zoneClean</field> <field name="WITH_DELAY">TRUE</field> <field name="DELAY_MS">2000</field> <field name="UNIT">ms</field> <field name="CLEAR_RUNNING">FALSE</field> <value name="VALUE"> <block type="text_getSubstring" id="VT%v(ZET.r5+Rt`f69%3"> <mutation at1="false" at2="true"></mutation> <field name="WHERE1">FIRST</field> <field name="WHERE2">FROM_END</field> <value name="STRING"> <block type="variables_get" id="#^Ve?i?l1KOM!k#ay@`o"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> </block> </value> <value name="AT2"> <block type="math_number" id="OG(yUHq4kg_FW4Rhxla%"> <field name="NUM">2</field> </block> </value> </block> </value> <next> <block type="timeouts_settimeout" id="96x:qn{s)q!Q@*BY#Cbd"> <field name="NAME">timeout2</field> <field name="DELAY">2000</field> <field name="UNIT">ms</field> <statement name="STATEMENT"> <block type="control" id="!F:nw$HUz,5W,s)7wpe?"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="?stB%E^p^TktGM(2/iT5"> <field name="BOOL">FALSE</field> </block> </value> </block> </statement> </block> </next> </block> </next> </block> </next> </block> </statement> <next> <block type="comment" id="GIls=|^jng,VyA|G`v5@"> <field name="COMMENT">Zonenreinigung</field> <next> <block type="controls_if" id="v,w,lxZA{`U5jH%sZ9_+"> <value name="IF0"> <block type="logic_compare" id="6!u-k;8g{}iZ@]7a:q},"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="fXTWVtjZ~Mu.=MBRia!V"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Zonenreinigung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="BnMgWHPrSq]gels9RJCi"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> <statement name="DO0"> <block type="variables_set" id="e/X`JuuUzE-2Q2WGR@3%"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> <value name="VALUE"> <block type="text_join" id="v)Ty`_}=vh}T)lohOva8"> <mutation items="9"></mutation> <value name="ADD0"> <block type="logic_ternary" id="y33mza~;IB5bwI+BdTx0"> <value name="IF"> <block type="get_value" id="i/xE_.D~T[.VN|R7h2*9"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Wohnzimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="*_@O}iU(+E%5DLs!FhAh"> <field name="VAR" id="H5jM!d-6fer30oMoMTOL" variabletype="">Wohnzimmer</field> </block> </value> </block> </value> <value name="ADD1"> <block type="logic_ternary" id="^lQ617?`OzvT~,R3I3A-"> <value name="IF"> <block type="get_value" id="]40PB|y@ymL)yDb%~wK4"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Arbeitszimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="M8yASo)b*]Ni!m*m:t|("> <field name="VAR" id="-M/PPIWr7NY[r%Jw1vXb" variabletype="">Arbeitszimmer</field> </block> </value> </block> </value> <value name="ADD2"> <block type="logic_ternary" id="c~jGl7ubHD*hHe7eB:cE"> <value name="IF"> <block type="get_value" id="Tc(%d+khX_!ggfH]=ZHY"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kueche</field> </block> </value> <value name="THEN"> <block type="variables_get" id="_+~P}9ZEK6EHUO9m`//6"> <field name="VAR" id=":%U|iH-0aK@J*xqmm2$s" variabletype="">Kueche</field> </block> </value> </block> </value> <value name="ADD3"> <block type="logic_ternary" id="8!H8{A]F9/7{C:a5p@+d"> <value name="IF"> <block type="get_value" id="fWW.d.#7^CWllQ(Wj)qo"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kuechenblock</field> </block> </value> <value name="THEN"> <block type="variables_get" id="ExT1my.vc6/i[f!or8nc"> <field name="VAR" id="qlPh|Kcns,Le0OjrSr~Q" variabletype="">Kuechenblock</field> </block> </value> </block> </value> <value name="ADD4"> <block type="logic_ternary" id="::uCup#-8NBu=T8?NS[a"> <value name="IF"> <block type="get_value" id="4zavc5=]*D)hyugS6%Mv"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kinderzimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="Mn1JBI8WIpTj+?E{qy;N"> <field name="VAR" id="TWx.F5)_#a0_W/gb6CbH" variabletype="">Kinderzimmer</field> </block> </value> </block> </value> <value name="ADD5"> <block type="logic_ternary" id="!+nVJSywWsdz(M.xXPK!"> <value name="IF"> <block type="get_value" id="9a_^QM$y]nmI%rtC,m=5"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Schlafzimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="PC*FG7mqGLSw)n2Ht@_}"> <field name="VAR" id="%D}S:Ibzy1[a1-6)Yk}K" variabletype="">Schlafzimmer</field> </block> </value> </block> </value> <value name="ADD6"> <block type="logic_ternary" id="PBGf*kP_JHi7SiKSEn;Q"> <value name="IF"> <block type="get_value" id="4Nu}@=#]R#svmapS]Chi"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer1</field> </block> </value> <value name="THEN"> <block type="variables_get" id="NeLB6-52iOmm@{eO,h2n"> <field name="VAR" id="![*U^yoiQy}#OpB-KNZZ" variabletype="">Badezimmer1</field> </block> </value> </block> </value> <value name="ADD7"> <block type="logic_ternary" id="Irqm{s-P:3nzxa0wC+!("> <value name="IF"> <block type="get_value" id="?*1pGQy-YhGI(k8~oqHo"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> </block> </value> <value name="THEN"> <block type="variables_get" id="BE]6ZGB705-gz3Oh)br4"> <field name="VAR" id="W5^D4IEYa#}p]qmSx3tw" variabletype="">Badezimmer2</field> </block> </value> </block> </value> <value name="ADD8"> <block type="logic_ternary" id="]_|$2G.(sXz]K=Q4?-W%"> <value name="IF"> <block type="get_value" id="hIU0QPCNqz)Rc5CJOTq~"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Eingang</field> </block> </value> <value name="THEN"> <block type="variables_get" id="72qhPGm2_V$ug~O::8`s"> <field name="VAR" id="pS)E,EGzvESC,L}rBk/X" variabletype="">Eingang</field> </block> </value> </block> </value> </block> </value> <next> <block type="control" id="-TH|!h,pr~qYQRQ1z^+B"> <mutation delay_input="true"></mutation> <field name="OID">mihome-vacuum.0.control.zoneClean</field> <field name="WITH_DELAY">TRUE</field> <field name="DELAY_MS">2000</field> <field name="UNIT">ms</field> <field name="CLEAR_RUNNING">FALSE</field> <value name="VALUE"> <block type="text_getSubstring" id="4?4~VI.8}ICa=S+3_/cp"> <mutation at1="false" at2="true"></mutation> <field name="WHERE1">FIRST</field> <field name="WHERE2">FROM_END</field> <value name="STRING"> <block type="variables_get" id="+J6J)VMD)*SLgSS|mA[L"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> </block> </value> <value name="AT2"> <block type="math_number" id="lMW#3.1_0w^EeJ:nH-,}"> <field name="NUM">2</field> </block> </value> </block> </value> <next> <block type="timeouts_settimeout" id="g3ANAKnHZhK%{lywco;G"> <field name="NAME">timeout3</field> <field name="DELAY">2000</field> <field name="UNIT">ms</field> <statement name="STATEMENT"> <block type="procedures_callnoreturn" id="bl|_D]BU;m;![b|CE=tD"> <mutation name="State_reset"></mutation> <next> <block type="control" id="5Ffm~QQzNj[*LR~3vW/C"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Zonenreinigung</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="oBUibo;ny}etEM(qw4f,"> <field name="BOOL">FALSE</field> </block> </value> </block> </next> </block> </statement> </block> </next> </block> </next> </block> </statement> </block> </next> </block> </next> </block> </next> </block> </next> </block> </statement> <next> <block type="comment" id="4SL7A$BJWd8aSJIV4NC_"> <field name="COMMENT">Mülleimer</field> <next> <block type="on_ext" id="k/RM8fOgR]I|]*u+2[zC"> <mutation items="1"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="XUr@Yx.}}pK`gCj5PAn*"> <field name="oid">default</field> </shadow> <block type="field_oid" id="_ytw!lj%eq}{yz}=6lYS"> <field name="oid">mihome-vacuum.0.info.state</field> </block> </value> <statement name="STATEMENT"> <block type="controls_if" id="GV=@:(rB=!y~MV:**O2l"> <value name="IF0"> <block type="logic_operation" id="FUH]1anMDJ,/Y-M@AE8G" inline="false"> <field name="OP">AND</field> <value name="A"> <block type="logic_compare" id="enK-TSGXHSaF9ZcuSnBK"> <field name="OP">EQ</field> <value name="A"> <block type="on_source" id="1EA|hPYjL~GgA~@9|a,+"> <field name="ATTR">state.val</field> </block> </value> <value name="B"> <block type="math_number" id="9q[rY?t!I0+pMR=){A;]"> <field name="NUM">6</field> </block> </value> </block> </value> <value name="B"> <block type="logic_operation" id="47Xd]5yDkd{9X$x^wZuQ" inline="false"> <field name="OP">AND</field> <value name="A"> <block type="logic_compare" id="??/L@.%:q0VmNU?r^25h"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="r!0tYv3LA]OJ^d[[tV7b"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="WYmV2|@--*C=YimRx]$-"> <field name="BOOL">FALSE</field> </block> </value> </block> </value> <value name="B"> <block type="logic_compare" id="pxxy7cXZ*yD+YRjDv8_4"> <field name="OP">GTE</field> <value name="A"> <block type="get_value" id=":;tIfb,z6,%TYs!F7g)W"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Info.Staubbehaelter</field> </block> </value> <value name="B"> <block type="math_number" id="iycLg1#2$5dof4VrE9Z_"> <field name="NUM">90</field> </block> </value> </block> </value> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="ytm=n77c~p?jRQwZ1G9f"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.pause</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="zVlQ?7+A@Ws5L%4DWqFW"> <field name="BOOL">TRUE</field> </block> </value> <next> <block type="control" id="h/aiY0=nVAS@MZZ]9JvT"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.goTo</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="text" id="^=$;?Ee4zo[e%E-jT[=S"> <field name="TEXT">24900,25500</field> </block> </value> <next> <block type="timeouts_settimeout" id="~Z[.EjoHlP@Cuzckh[:E"> <field name="NAME">timeout</field> <field name="DELAY">2000</field> <field name="UNIT">ms</field> <statement name="STATEMENT"> <block type="control" id="}._cRm]pDhpi5xKA/mW`"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Info.Staubbehaelter</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="math_number" id="KGx$@%M46^%`OSzs0+Mt"> <field name="NUM">0</field> </block> </value> </block> </statement> </block> </next> </block> </next> </block> </statement> </block> </statement> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> <block type="procedures_defnoreturn" id="/=xI^u`R$@J)r[w+txx*" collapsed="true" x="-262" y="-1362"> <field name="NAME">State_reset</field> <comment pinned="false" h="80" w="160">Beschreibe diese Funktion …</comment> <statement name="STACK"> <block type="control" id="0xyak8u^:zS{FR`B$$oP"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Wohnzimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="_,@$OI_U[Nw*dhZv0I!#"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="kCx9Z*57e-O_3jOOSmxl"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Arbeitszimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="|O5B+nNx{@)k:R%#,Xuj"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="tcMzai^]4V!=_)jZ2hT*"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kueche</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="*UWSlp(#oDuvYe+V5Xix"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="2aR:H_YSn?LdN68`gai6"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kuechenblock</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="5tXVFxwCEX+;^:G/-avO"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="1M96,p=+T9/cLKxy*wv~"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kinderzimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="ea7-A:UM::aoN7548ug)"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="1dw,h.nRHH4a[0xNhV(t"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Schlafzimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="Sxe;ZrEH8oU^m*7bu/V5"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="o-DfI7uJ.!xhKE0M2L/L"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer1</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="~6eAjO7%G-n8}z#JKey%"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="}8a_(a_ipwmY:!1XbMZb"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="FZ}yKw*JQYpMv/?aJ?2{"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="-@bExkz=rlBa-A+y|TV4"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Eingang</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="{6H!0LpXcuI2)J9*,Qf)"> <field name="BOOL">FALSE</field> </block> </value> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </statement> </block> <block type="comment" id="Gw2WBZOOt_*1`l7pbMxd" x="-262" y="-1337"> <field name="COMMENT">Bad zweigeteilt</field> <next> <block type="on_ext" id="+dL/1oJfy}3$%agDgy,/" collapsed="true"> <mutation items="1"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="=mXzU`}Iv4(VG-(c`~C]"> <field name="oid">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer1</field> </shadow> </value> <statement name="STATEMENT"> <block type="controls_if" id="j}@-/3tA?Ux_4);`5;Y)"> <mutation else="1"></mutation> <value name="IF0"> <block type="logic_compare" id="phRG-|uQ###cZU5f-ZAu"> <field name="OP">EQ</field> <value name="A"> <block type="on_source" id="dGunY:ecMVCrNExqbUUk"> <field name="ATTR">state.val</field> </block> </value> <value name="B"> <block type="logic_boolean" id="28d=DevcP(q8!P.+8)DC"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="7FT?iiFQp)RhmJU)bK]z"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="LadKXJjTc:!*x%PV58+H"> <field name="BOOL">TRUE</field> </block> </value> </block> </statement> <statement name="ELSE"> <block type="control" id="DJWA+Ty0xX|gZE[55o5]"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="MtNAtd-fN_rC.P:+-n4K"> <field name="BOOL">FALSE</field> </block> </value> </block> </statement> </block> </statement> </block> </next> </block> </xml> -
@der-eine sagte in [Frage] Xiaomi Vacuum cleaner:
@ntsa86 nein, wurde es nicht. Ich löse das Problem in dem ich nur noch Zonenreinigungen anstosse. Auch für eine Komplettreinigung!
Das funktioniert sehr gut und in Verbindung mit einer VIS auch gut steuerbar.Was ist das für eine coole VIS?
-
@seppel786 klar
<xml xmlns="http://www.w3.org/1999/xhtml"> <variables> <variable type="" id="H5jM!d-6fer30oMoMTOL">Wohnzimmer</variable> <variable type="" id="-M/PPIWr7NY[r%Jw1vXb">Arbeitszimmer</variable> <variable type="" id=":%U|iH-0aK@J*xqmm2$s">Kueche</variable> <variable type="" id="qlPh|Kcns,Le0OjrSr~Q">Kuechenblock</variable> <variable type="" id="TWx.F5)_#a0_W/gb6CbH">Kinderzimmer</variable> <variable type="" id="%D}S:Ibzy1[a1-6)Yk}K">Schlafzimmer</variable> <variable type="" id="![*U^yoiQy}#OpB-KNZZ">Badezimmer1</variable> <variable type="" id="W5^D4IEYa#}p]qmSx3tw">Badezimmer2</variable> <variable type="" id="pS)E,EGzvESC,L}rBk/X">Eingang</variable> <variable type="" id="?338$LOCRmXqk%RE}N95">Zone</variable> <variable type="undefined" id="timeout4">timeout4</variable> <variable type="undefined" id="timeout">timeout</variable> <variable type="undefined" id="timeout2">timeout2</variable> <variable type="undefined" id="timeout3">timeout3</variable> </variables> <block type="variables_set" id="%oE/KUz@)En!^j{~$d-9" x="-1038" y="-1362"> <field name="VAR" id="H5jM!d-6fer30oMoMTOL" variabletype="">Wohnzimmer</field> <value name="VALUE"> <block type="text" id="Eg-alu,H4WSal,1P[?qe"> <field name="TEXT">[18190,27121,21540,32571,1],</field> </block> </value> <next> <block type="variables_set" id="gQ$iEL?YpEgmPAT$2^Uw"> <field name="VAR" id="-M/PPIWr7NY[r%Jw1vXb" variabletype="">Arbeitszimmer</field> <value name="VALUE"> <block type="text" id="oI2l*9_~qVjEOhn@i=Se"> <field name="TEXT">[19549,24651,21999,26801,1],</field> </block> </value> <next> <block type="variables_set" id="kKkRwrSMU.Z~iSW8^@%"> <field name="VAR" id=":%U|iH-0aK@J*xqmm2$s" variabletype="">Kueche</field> <value name="VALUE"> <block type="text" id="tHGu}ud|Eg2pTbQfId[;"> <field name="TEXT">[21973,25137,25673,28787,1],</field> </block> </value> <next> <block type="variables_set" id="Kbh`mAowWKN8Q+,w=+Ws"> <field name="VAR" id="qlPh|Kcns,Le0OjrSr~Q" variabletype="">Kuechenblock</field> <value name="VALUE"> <block type="text" id="@~f97r;QUO-?:G^OvMUs"> <field name="TEXT">[22395,25132,25545,26382,1],</field> </block> </value> <next> <block type="variables_set" id="y,ZY}6:X2v=aKFrS@d/3"> <field name="VAR" id="TWx.F5)_#a0_W/gb6CbH" variabletype="">Kinderzimmer</field> <value name="VALUE"> <block type="text" id="RAjw@mt+(M}NB9%q[2M#"> <field name="TEXT">[26124,26337,30324,27787,1],</field> </block> </value> <next> <block type="variables_set" id="F33[^H/7@s[mB!qvTc6"> <field name="VAR" id="%D}S:Ibzy1[a1-6)Yk}K" variabletype="">Schlafzimmer</field> <value name="VALUE"> <block type="text" id="5X#Jsw{5.KC;X@cxTBXB"> <field name="TEXT">[26433,29138,29983,30638,1],</field> </block> </value> <next> <block type="variables_set" id="RImUWh7f5JSa?aZjNtAr"> <field name="VAR" id="![*U^yoiQy}#OpB-KNZZ" variabletype="">Badezimmer1</field> <value name="VALUE"> <block type="text" id="z=Ek=|Z+De!+k?r^j9!"> <field name="TEXT">[23887,31211,25037,32411,1],</field> </block> </value> <next> <block type="variables_set" id="7qBj+3{HkC,O5~:5%{y!"> <field name="VAR" id="W5^D4IEYa#}p]qmSx3tw" variabletype="">Badezimmer2</field> <value name="VALUE"> <block type="text" id="tWwo;1^rj?{#6RhMN:3N"> <field name="TEXT">[22872,29403,25222,31153,1],</field> </block> </value> <next> <block type="variables_set" id="ZP1(0{)xe77z-e/:5+oA"> <field name="VAR" id="pS)E,EGzvESC,L}rBk/X" variabletype="">Eingang</field> <value name="VALUE"> <block type="text" id="G2jNrNEQ~^71RKWaEMkw"> <field name="TEXT">[25295,26623,26545,33023,1],</field> </block> </value> <next> <block type="on_ext" id="9%cGN%K[S:G}-wS$A|Bu"> <mutation items="3"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="W%LzaIj?%a$/0/Dhe*$1"> <field name="oid">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </shadow> </value> <value name="OID1"> <shadow type="field_oid" id="l:SF_dE*=N4XW]ArE*sD"> <field name="oid">Eigene_Datenpunkte.0.Staubsauger.Start.Zonenreinigung</field> </shadow> </value> <value name="OID2"> <shadow type="field_oid" id=",T6#Bq}B]^R)8WFz:Yv,"> <field name="oid">mihome-vacuum.0.info.state</field> </shadow> </value> <statement name="STATEMENT"> <block type="comment" id="5kjL#rX*Rl[8}t#.${!/"> <field name="COMMENT">Ganze Wohnung</field> <next> <block type="controls_if" id="jb:KM_s)2j8xp?Z%^TRP"> <value name="IF0"> <block type="logic_compare" id="p6A^J)j13Wt9GwjxUOjM"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id=")1gV4BAawM[{:Oj]a8?L"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="hpYz!0H`tW*Lrg;tS,[T"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> <statement name="DO0"> <block type="variables_set" id="Ym|AFVzY#e3R-}f`R}4;"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> <value name="VALUE"> <block type="text_join" id="kQZt^uCb=9XRDFy|L.fy"> <mutation items="5"></mutation> <value name="ADD0"> <block type="variables_get" id=".8^[-Dsd#=qP]4c3uIK@"> <field name="VAR" id="H5jM!d-6fer30oMoMTOL" variabletype="">Wohnzimmer</field> </block> </value> <value name="ADD1"> <block type="variables_get" id="US8G{za9xEH5nZg8X]PO"> <field name="VAR" id="-M/PPIWr7NY[r%Jw1vXb" variabletype="">Arbeitszimmer</field> </block> </value> <value name="ADD2"> <block type="variables_get" id="L0rr%p~Ol]~=TXM;E|]l"> <field name="VAR" id=":%U|iH-0aK@J*xqmm2$s" variabletype="">Kueche</field> </block> </value> <value name="ADD3"> <block type="variables_get" id=";EBlY#-lyW,BPV^%SZ)S"> <field name="VAR" id="TWx.F5)_#a0_W/gb6CbH" variabletype="">Kinderzimmer</field> </block> </value> <value name="ADD4"> <block type="variables_get" id="YkPmb)#c+xo^S5Tt*YQ$"> <field name="VAR" id="%D}S:Ibzy1[a1-6)Yk}K" variabletype="">Schlafzimmer</field> </block> </value> </block> </value> <next> <block type="timeouts_cleartimeout" id="zh@}ABz[+;/}gvI/Kw`b"> <field name="NAME">timeout4</field> <next> <block type="timeouts_settimeout" id="#tsJk0`/]~#g#-3yq:rs"> <field name="NAME">timeout4</field> <field name="DELAY">60</field> <field name="UNIT">min</field> <statement name="STATEMENT"> <block type="controls_if" id="CSBz`9fg*lsZcF_GXg7+"> <value name="IF0"> <block type="logic_compare" id="fEG7Z^p!wP8K7tj7/sr8"> <field name="OP">NEQ</field> <value name="A"> <block type="get_value" id="lGSHj@5Q*}e=`En.t.lj"> <field name="ATTR">val</field> <field name="OID">mihome-vacuum.0.info.state</field> </block> </value> <value name="B"> <block type="math_number" id="PW]6-]JoIOVB,DLj8#bx"> <field name="NUM">8</field> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="~nB:rxVzUvX8QpmlO]5t"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.pause</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="G(7d!Xng8#aMV]OHanzb"> <field name="BOOL">TRUE</field> </block> </value> </block> </statement> </block> </statement> <next> <block type="control" id="-ZB_LlS~QC-q{c^:}e$H"> <mutation delay_input="true"></mutation> <field name="OID">mihome-vacuum.0.control.zoneClean</field> <field name="WITH_DELAY">TRUE</field> <field name="DELAY_MS">2000</field> <field name="UNIT">ms</field> <field name="CLEAR_RUNNING">FALSE</field> <value name="VALUE"> <block type="text_getSubstring" id="SoSk(7CqUhz`ZyLGzQqq"> <mutation at1="false" at2="true"></mutation> <field name="WHERE1">FIRST</field> <field name="WHERE2">FROM_END</field> <value name="STRING"> <block type="variables_get" id="3n4R/lu:muWx+8H!/CBL"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> </block> </value> <value name="AT2"> <block type="math_number" id="cW%h]Kj1]K5|wsAeyxUJ"> <field name="NUM">2</field> </block> </value> </block> </value> </block> </next> </block> </next> </block> </next> </block> </statement> <next> <block type="controls_if" id="_![^=ag,PI?f4M`f4]%L"> <value name="IF0"> <block type="logic_operation" id=")Mse50nCFm}LN+ACgs(D"> <field name="OP">AND</field> <value name="A"> <block type="logic_compare" id="IB?J{(4i[MyXizL3?1-V"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="y5#Y:xO.720)ZouQJ__0"> <field name="ATTR">val</field> <field name="OID">mihome-vacuum.0.info.state</field> </block> </value> <value name="B"> <block type="math_number" id="B}X[*vc9qqa:|~nk8[k)"> <field name="NUM">6</field> </block> </value> </block> </value> <value name="B"> <block type="logic_compare" id="|Aqyn-?`=Qc)t+mRa,4{"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="o/C;twO{!UnuU?1Z1Euj"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="#t*pyH.@+xDow#IveEUa"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="N%]!(6:oYcTcGN;fx3]!"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.pause</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="VNVr.jFS#Z|R@!FtAzEA"> <field name="BOOL">TRUE</field> </block> </value> <next> <block type="variables_set" id="oo%SmC!8sb7OaZZ[,GbZ"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> <value name="VALUE"> <block type="text_join" id="A.fG#U%z@Q}i|p%a=6;U"> <mutation items="3"></mutation> <value name="ADD0"> <block type="variables_get" id="sBA9mE0d:a+0k(`SM-)."> <field name="VAR" id="![*U^yoiQy}#OpB-KNZZ" variabletype="">Badezimmer1</field> </block> </value> <value name="ADD1"> <block type="variables_get" id="b%WHc33pnf+e=w|dnPY?"> <field name="VAR" id="W5^D4IEYa#}p]qmSx3tw" variabletype="">Badezimmer2</field> </block> </value> <value name="ADD2"> <block type="variables_get" id="S|{E4[92t3T(p(Tba(lQ"> <field name="VAR" id="pS)E,EGzvESC,L}rBk/X" variabletype="">Eingang</field> </block> </value> </block> </value> <next> <block type="control" id="X5=x+qn*E$l2f6b55unk"> <mutation delay_input="true"></mutation> <field name="OID">mihome-vacuum.0.control.zoneClean</field> <field name="WITH_DELAY">TRUE</field> <field name="DELAY_MS">2000</field> <field name="UNIT">ms</field> <field name="CLEAR_RUNNING">FALSE</field> <value name="VALUE"> <block type="text_getSubstring" id="VT%v(ZET.r5+Rt`f69%3"> <mutation at1="false" at2="true"></mutation> <field name="WHERE1">FIRST</field> <field name="WHERE2">FROM_END</field> <value name="STRING"> <block type="variables_get" id="#^Ve?i?l1KOM!k#ay@`o"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> </block> </value> <value name="AT2"> <block type="math_number" id="OG(yUHq4kg_FW4Rhxla%"> <field name="NUM">2</field> </block> </value> </block> </value> <next> <block type="timeouts_settimeout" id="96x:qn{s)q!Q@*BY#Cbd"> <field name="NAME">timeout2</field> <field name="DELAY">2000</field> <field name="UNIT">ms</field> <statement name="STATEMENT"> <block type="control" id="!F:nw$HUz,5W,s)7wpe?"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="?stB%E^p^TktGM(2/iT5"> <field name="BOOL">FALSE</field> </block> </value> </block> </statement> </block> </next> </block> </next> </block> </next> </block> </statement> <next> <block type="comment" id="GIls=|^jng,VyA|G`v5@"> <field name="COMMENT">Zonenreinigung</field> <next> <block type="controls_if" id="v,w,lxZA{`U5jH%sZ9_+"> <value name="IF0"> <block type="logic_compare" id="6!u-k;8g{}iZ@]7a:q},"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="fXTWVtjZ~Mu.=MBRia!V"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Zonenreinigung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="BnMgWHPrSq]gels9RJCi"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> <statement name="DO0"> <block type="variables_set" id="e/X`JuuUzE-2Q2WGR@3%"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> <value name="VALUE"> <block type="text_join" id="v)Ty`_}=vh}T)lohOva8"> <mutation items="9"></mutation> <value name="ADD0"> <block type="logic_ternary" id="y33mza~;IB5bwI+BdTx0"> <value name="IF"> <block type="get_value" id="i/xE_.D~T[.VN|R7h2*9"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Wohnzimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="*_@O}iU(+E%5DLs!FhAh"> <field name="VAR" id="H5jM!d-6fer30oMoMTOL" variabletype="">Wohnzimmer</field> </block> </value> </block> </value> <value name="ADD1"> <block type="logic_ternary" id="^lQ617?`OzvT~,R3I3A-"> <value name="IF"> <block type="get_value" id="]40PB|y@ymL)yDb%~wK4"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Arbeitszimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="M8yASo)b*]Ni!m*m:t|("> <field name="VAR" id="-M/PPIWr7NY[r%Jw1vXb" variabletype="">Arbeitszimmer</field> </block> </value> </block> </value> <value name="ADD2"> <block type="logic_ternary" id="c~jGl7ubHD*hHe7eB:cE"> <value name="IF"> <block type="get_value" id="Tc(%d+khX_!ggfH]=ZHY"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kueche</field> </block> </value> <value name="THEN"> <block type="variables_get" id="_+~P}9ZEK6EHUO9m`//6"> <field name="VAR" id=":%U|iH-0aK@J*xqmm2$s" variabletype="">Kueche</field> </block> </value> </block> </value> <value name="ADD3"> <block type="logic_ternary" id="8!H8{A]F9/7{C:a5p@+d"> <value name="IF"> <block type="get_value" id="fWW.d.#7^CWllQ(Wj)qo"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kuechenblock</field> </block> </value> <value name="THEN"> <block type="variables_get" id="ExT1my.vc6/i[f!or8nc"> <field name="VAR" id="qlPh|Kcns,Le0OjrSr~Q" variabletype="">Kuechenblock</field> </block> </value> </block> </value> <value name="ADD4"> <block type="logic_ternary" id="::uCup#-8NBu=T8?NS[a"> <value name="IF"> <block type="get_value" id="4zavc5=]*D)hyugS6%Mv"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kinderzimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="Mn1JBI8WIpTj+?E{qy;N"> <field name="VAR" id="TWx.F5)_#a0_W/gb6CbH" variabletype="">Kinderzimmer</field> </block> </value> </block> </value> <value name="ADD5"> <block type="logic_ternary" id="!+nVJSywWsdz(M.xXPK!"> <value name="IF"> <block type="get_value" id="9a_^QM$y]nmI%rtC,m=5"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Schlafzimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="PC*FG7mqGLSw)n2Ht@_}"> <field name="VAR" id="%D}S:Ibzy1[a1-6)Yk}K" variabletype="">Schlafzimmer</field> </block> </value> </block> </value> <value name="ADD6"> <block type="logic_ternary" id="PBGf*kP_JHi7SiKSEn;Q"> <value name="IF"> <block type="get_value" id="4Nu}@=#]R#svmapS]Chi"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer1</field> </block> </value> <value name="THEN"> <block type="variables_get" id="NeLB6-52iOmm@{eO,h2n"> <field name="VAR" id="![*U^yoiQy}#OpB-KNZZ" variabletype="">Badezimmer1</field> </block> </value> </block> </value> <value name="ADD7"> <block type="logic_ternary" id="Irqm{s-P:3nzxa0wC+!("> <value name="IF"> <block type="get_value" id="?*1pGQy-YhGI(k8~oqHo"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> </block> </value> <value name="THEN"> <block type="variables_get" id="BE]6ZGB705-gz3Oh)br4"> <field name="VAR" id="W5^D4IEYa#}p]qmSx3tw" variabletype="">Badezimmer2</field> </block> </value> </block> </value> <value name="ADD8"> <block type="logic_ternary" id="]_|$2G.(sXz]K=Q4?-W%"> <value name="IF"> <block type="get_value" id="hIU0QPCNqz)Rc5CJOTq~"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Eingang</field> </block> </value> <value name="THEN"> <block type="variables_get" id="72qhPGm2_V$ug~O::8`s"> <field name="VAR" id="pS)E,EGzvESC,L}rBk/X" variabletype="">Eingang</field> </block> </value> </block> </value> </block> </value> <next> <block type="control" id="-TH|!h,pr~qYQRQ1z^+B"> <mutation delay_input="true"></mutation> <field name="OID">mihome-vacuum.0.control.zoneClean</field> <field name="WITH_DELAY">TRUE</field> <field name="DELAY_MS">2000</field> <field name="UNIT">ms</field> <field name="CLEAR_RUNNING">FALSE</field> <value name="VALUE"> <block type="text_getSubstring" id="4?4~VI.8}ICa=S+3_/cp"> <mutation at1="false" at2="true"></mutation> <field name="WHERE1">FIRST</field> <field name="WHERE2">FROM_END</field> <value name="STRING"> <block type="variables_get" id="+J6J)VMD)*SLgSS|mA[L"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> </block> </value> <value name="AT2"> <block type="math_number" id="lMW#3.1_0w^EeJ:nH-,}"> <field name="NUM">2</field> </block> </value> </block> </value> <next> <block type="timeouts_settimeout" id="g3ANAKnHZhK%{lywco;G"> <field name="NAME">timeout3</field> <field name="DELAY">2000</field> <field name="UNIT">ms</field> <statement name="STATEMENT"> <block type="procedures_callnoreturn" id="bl|_D]BU;m;![b|CE=tD"> <mutation name="State_reset"></mutation> <next> <block type="control" id="5Ffm~QQzNj[*LR~3vW/C"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Zonenreinigung</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="oBUibo;ny}etEM(qw4f,"> <field name="BOOL">FALSE</field> </block> </value> </block> </next> </block> </statement> </block> </next> </block> </next> </block> </statement> </block> </next> </block> </next> </block> </next> </block> </next> </block> </statement> <next> <block type="comment" id="4SL7A$BJWd8aSJIV4NC_"> <field name="COMMENT">Mülleimer</field> <next> <block type="on_ext" id="k/RM8fOgR]I|]*u+2[zC"> <mutation items="1"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="XUr@Yx.}}pK`gCj5PAn*"> <field name="oid">default</field> </shadow> <block type="field_oid" id="_ytw!lj%eq}{yz}=6lYS"> <field name="oid">mihome-vacuum.0.info.state</field> </block> </value> <statement name="STATEMENT"> <block type="controls_if" id="GV=@:(rB=!y~MV:**O2l"> <value name="IF0"> <block type="logic_operation" id="FUH]1anMDJ,/Y-M@AE8G" inline="false"> <field name="OP">AND</field> <value name="A"> <block type="logic_compare" id="enK-TSGXHSaF9ZcuSnBK"> <field name="OP">EQ</field> <value name="A"> <block type="on_source" id="1EA|hPYjL~GgA~@9|a,+"> <field name="ATTR">state.val</field> </block> </value> <value name="B"> <block type="math_number" id="9q[rY?t!I0+pMR=){A;]"> <field name="NUM">6</field> </block> </value> </block> </value> <value name="B"> <block type="logic_operation" id="47Xd]5yDkd{9X$x^wZuQ" inline="false"> <field name="OP">AND</field> <value name="A"> <block type="logic_compare" id="??/L@.%:q0VmNU?r^25h"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="r!0tYv3LA]OJ^d[[tV7b"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="WYmV2|@--*C=YimRx]$-"> <field name="BOOL">FALSE</field> </block> </value> </block> </value> <value name="B"> <block type="logic_compare" id="pxxy7cXZ*yD+YRjDv8_4"> <field name="OP">GTE</field> <value name="A"> <block type="get_value" id=":;tIfb,z6,%TYs!F7g)W"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Info.Staubbehaelter</field> </block> </value> <value name="B"> <block type="math_number" id="iycLg1#2$5dof4VrE9Z_"> <field name="NUM">90</field> </block> </value> </block> </value> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="ytm=n77c~p?jRQwZ1G9f"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.pause</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="zVlQ?7+A@Ws5L%4DWqFW"> <field name="BOOL">TRUE</field> </block> </value> <next> <block type="control" id="h/aiY0=nVAS@MZZ]9JvT"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.goTo</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="text" id="^=$;?Ee4zo[e%E-jT[=S"> <field name="TEXT">24900,25500</field> </block> </value> <next> <block type="timeouts_settimeout" id="~Z[.EjoHlP@Cuzckh[:E"> <field name="NAME">timeout</field> <field name="DELAY">2000</field> <field name="UNIT">ms</field> <statement name="STATEMENT"> <block type="control" id="}._cRm]pDhpi5xKA/mW`"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Info.Staubbehaelter</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="math_number" id="KGx$@%M46^%`OSzs0+Mt"> <field name="NUM">0</field> </block> </value> </block> </statement> </block> </next> </block> </next> </block> </statement> </block> </statement> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> <block type="procedures_defnoreturn" id="/=xI^u`R$@J)r[w+txx*" collapsed="true" x="-262" y="-1362"> <field name="NAME">State_reset</field> <comment pinned="false" h="80" w="160">Beschreibe diese Funktion …</comment> <statement name="STACK"> <block type="control" id="0xyak8u^:zS{FR`B$$oP"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Wohnzimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="_,@$OI_U[Nw*dhZv0I!#"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="kCx9Z*57e-O_3jOOSmxl"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Arbeitszimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="|O5B+nNx{@)k:R%#,Xuj"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="tcMzai^]4V!=_)jZ2hT*"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kueche</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="*UWSlp(#oDuvYe+V5Xix"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="2aR:H_YSn?LdN68`gai6"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kuechenblock</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="5tXVFxwCEX+;^:G/-avO"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="1M96,p=+T9/cLKxy*wv~"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kinderzimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="ea7-A:UM::aoN7548ug)"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="1dw,h.nRHH4a[0xNhV(t"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Schlafzimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="Sxe;ZrEH8oU^m*7bu/V5"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="o-DfI7uJ.!xhKE0M2L/L"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer1</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="~6eAjO7%G-n8}z#JKey%"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="}8a_(a_ipwmY:!1XbMZb"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="FZ}yKw*JQYpMv/?aJ?2{"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="-@bExkz=rlBa-A+y|TV4"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Eingang</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="{6H!0LpXcuI2)J9*,Qf)"> <field name="BOOL">FALSE</field> </block> </value> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </statement> </block> <block type="comment" id="Gw2WBZOOt_*1`l7pbMxd" x="-262" y="-1337"> <field name="COMMENT">Bad zweigeteilt</field> <next> <block type="on_ext" id="+dL/1oJfy}3$%agDgy,/" collapsed="true"> <mutation items="1"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="=mXzU`}Iv4(VG-(c`~C]"> <field name="oid">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer1</field> </shadow> </value> <statement name="STATEMENT"> <block type="controls_if" id="j}@-/3tA?Ux_4);`5;Y)"> <mutation else="1"></mutation> <value name="IF0"> <block type="logic_compare" id="phRG-|uQ###cZU5f-ZAu"> <field name="OP">EQ</field> <value name="A"> <block type="on_source" id="dGunY:ecMVCrNExqbUUk"> <field name="ATTR">state.val</field> </block> </value> <value name="B"> <block type="logic_boolean" id="28d=DevcP(q8!P.+8)DC"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="7FT?iiFQp)RhmJU)bK]z"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="LadKXJjTc:!*x%PV58+H"> <field name="BOOL">TRUE</field> </block> </value> </block> </statement> <statement name="ELSE"> <block type="control" id="DJWA+Ty0xX|gZE[55o5]"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="MtNAtd-fN_rC.P:+-n4K"> <field name="BOOL">FALSE</field> </block> </value> </block> </statement> </block> </statement> </block> </next> </block> </xml> -
@seppel786 klar
<xml xmlns="http://www.w3.org/1999/xhtml"> <variables> <variable type="" id="H5jM!d-6fer30oMoMTOL">Wohnzimmer</variable> <variable type="" id="-M/PPIWr7NY[r%Jw1vXb">Arbeitszimmer</variable> <variable type="" id=":%U|iH-0aK@J*xqmm2$s">Kueche</variable> <variable type="" id="qlPh|Kcns,Le0OjrSr~Q">Kuechenblock</variable> <variable type="" id="TWx.F5)_#a0_W/gb6CbH">Kinderzimmer</variable> <variable type="" id="%D}S:Ibzy1[a1-6)Yk}K">Schlafzimmer</variable> <variable type="" id="![*U^yoiQy}#OpB-KNZZ">Badezimmer1</variable> <variable type="" id="W5^D4IEYa#}p]qmSx3tw">Badezimmer2</variable> <variable type="" id="pS)E,EGzvESC,L}rBk/X">Eingang</variable> <variable type="" id="?338$LOCRmXqk%RE}N95">Zone</variable> <variable type="undefined" id="timeout4">timeout4</variable> <variable type="undefined" id="timeout">timeout</variable> <variable type="undefined" id="timeout2">timeout2</variable> <variable type="undefined" id="timeout3">timeout3</variable> </variables> <block type="variables_set" id="%oE/KUz@)En!^j{~$d-9" x="-1038" y="-1362"> <field name="VAR" id="H5jM!d-6fer30oMoMTOL" variabletype="">Wohnzimmer</field> <value name="VALUE"> <block type="text" id="Eg-alu,H4WSal,1P[?qe"> <field name="TEXT">[18190,27121,21540,32571,1],</field> </block> </value> <next> <block type="variables_set" id="gQ$iEL?YpEgmPAT$2^Uw"> <field name="VAR" id="-M/PPIWr7NY[r%Jw1vXb" variabletype="">Arbeitszimmer</field> <value name="VALUE"> <block type="text" id="oI2l*9_~qVjEOhn@i=Se"> <field name="TEXT">[19549,24651,21999,26801,1],</field> </block> </value> <next> <block type="variables_set" id="kKkRwrSMU.Z~iSW8^@%"> <field name="VAR" id=":%U|iH-0aK@J*xqmm2$s" variabletype="">Kueche</field> <value name="VALUE"> <block type="text" id="tHGu}ud|Eg2pTbQfId[;"> <field name="TEXT">[21973,25137,25673,28787,1],</field> </block> </value> <next> <block type="variables_set" id="Kbh`mAowWKN8Q+,w=+Ws"> <field name="VAR" id="qlPh|Kcns,Le0OjrSr~Q" variabletype="">Kuechenblock</field> <value name="VALUE"> <block type="text" id="@~f97r;QUO-?:G^OvMUs"> <field name="TEXT">[22395,25132,25545,26382,1],</field> </block> </value> <next> <block type="variables_set" id="y,ZY}6:X2v=aKFrS@d/3"> <field name="VAR" id="TWx.F5)_#a0_W/gb6CbH" variabletype="">Kinderzimmer</field> <value name="VALUE"> <block type="text" id="RAjw@mt+(M}NB9%q[2M#"> <field name="TEXT">[26124,26337,30324,27787,1],</field> </block> </value> <next> <block type="variables_set" id="F33[^H/7@s[mB!qvTc6"> <field name="VAR" id="%D}S:Ibzy1[a1-6)Yk}K" variabletype="">Schlafzimmer</field> <value name="VALUE"> <block type="text" id="5X#Jsw{5.KC;X@cxTBXB"> <field name="TEXT">[26433,29138,29983,30638,1],</field> </block> </value> <next> <block type="variables_set" id="RImUWh7f5JSa?aZjNtAr"> <field name="VAR" id="![*U^yoiQy}#OpB-KNZZ" variabletype="">Badezimmer1</field> <value name="VALUE"> <block type="text" id="z=Ek=|Z+De!+k?r^j9!"> <field name="TEXT">[23887,31211,25037,32411,1],</field> </block> </value> <next> <block type="variables_set" id="7qBj+3{HkC,O5~:5%{y!"> <field name="VAR" id="W5^D4IEYa#}p]qmSx3tw" variabletype="">Badezimmer2</field> <value name="VALUE"> <block type="text" id="tWwo;1^rj?{#6RhMN:3N"> <field name="TEXT">[22872,29403,25222,31153,1],</field> </block> </value> <next> <block type="variables_set" id="ZP1(0{)xe77z-e/:5+oA"> <field name="VAR" id="pS)E,EGzvESC,L}rBk/X" variabletype="">Eingang</field> <value name="VALUE"> <block type="text" id="G2jNrNEQ~^71RKWaEMkw"> <field name="TEXT">[25295,26623,26545,33023,1],</field> </block> </value> <next> <block type="on_ext" id="9%cGN%K[S:G}-wS$A|Bu"> <mutation items="3"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="W%LzaIj?%a$/0/Dhe*$1"> <field name="oid">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </shadow> </value> <value name="OID1"> <shadow type="field_oid" id="l:SF_dE*=N4XW]ArE*sD"> <field name="oid">Eigene_Datenpunkte.0.Staubsauger.Start.Zonenreinigung</field> </shadow> </value> <value name="OID2"> <shadow type="field_oid" id=",T6#Bq}B]^R)8WFz:Yv,"> <field name="oid">mihome-vacuum.0.info.state</field> </shadow> </value> <statement name="STATEMENT"> <block type="comment" id="5kjL#rX*Rl[8}t#.${!/"> <field name="COMMENT">Ganze Wohnung</field> <next> <block type="controls_if" id="jb:KM_s)2j8xp?Z%^TRP"> <value name="IF0"> <block type="logic_compare" id="p6A^J)j13Wt9GwjxUOjM"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id=")1gV4BAawM[{:Oj]a8?L"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="hpYz!0H`tW*Lrg;tS,[T"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> <statement name="DO0"> <block type="variables_set" id="Ym|AFVzY#e3R-}f`R}4;"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> <value name="VALUE"> <block type="text_join" id="kQZt^uCb=9XRDFy|L.fy"> <mutation items="5"></mutation> <value name="ADD0"> <block type="variables_get" id=".8^[-Dsd#=qP]4c3uIK@"> <field name="VAR" id="H5jM!d-6fer30oMoMTOL" variabletype="">Wohnzimmer</field> </block> </value> <value name="ADD1"> <block type="variables_get" id="US8G{za9xEH5nZg8X]PO"> <field name="VAR" id="-M/PPIWr7NY[r%Jw1vXb" variabletype="">Arbeitszimmer</field> </block> </value> <value name="ADD2"> <block type="variables_get" id="L0rr%p~Ol]~=TXM;E|]l"> <field name="VAR" id=":%U|iH-0aK@J*xqmm2$s" variabletype="">Kueche</field> </block> </value> <value name="ADD3"> <block type="variables_get" id=";EBlY#-lyW,BPV^%SZ)S"> <field name="VAR" id="TWx.F5)_#a0_W/gb6CbH" variabletype="">Kinderzimmer</field> </block> </value> <value name="ADD4"> <block type="variables_get" id="YkPmb)#c+xo^S5Tt*YQ$"> <field name="VAR" id="%D}S:Ibzy1[a1-6)Yk}K" variabletype="">Schlafzimmer</field> </block> </value> </block> </value> <next> <block type="timeouts_cleartimeout" id="zh@}ABz[+;/}gvI/Kw`b"> <field name="NAME">timeout4</field> <next> <block type="timeouts_settimeout" id="#tsJk0`/]~#g#-3yq:rs"> <field name="NAME">timeout4</field> <field name="DELAY">60</field> <field name="UNIT">min</field> <statement name="STATEMENT"> <block type="controls_if" id="CSBz`9fg*lsZcF_GXg7+"> <value name="IF0"> <block type="logic_compare" id="fEG7Z^p!wP8K7tj7/sr8"> <field name="OP">NEQ</field> <value name="A"> <block type="get_value" id="lGSHj@5Q*}e=`En.t.lj"> <field name="ATTR">val</field> <field name="OID">mihome-vacuum.0.info.state</field> </block> </value> <value name="B"> <block type="math_number" id="PW]6-]JoIOVB,DLj8#bx"> <field name="NUM">8</field> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="~nB:rxVzUvX8QpmlO]5t"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.pause</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="G(7d!Xng8#aMV]OHanzb"> <field name="BOOL">TRUE</field> </block> </value> </block> </statement> </block> </statement> <next> <block type="control" id="-ZB_LlS~QC-q{c^:}e$H"> <mutation delay_input="true"></mutation> <field name="OID">mihome-vacuum.0.control.zoneClean</field> <field name="WITH_DELAY">TRUE</field> <field name="DELAY_MS">2000</field> <field name="UNIT">ms</field> <field name="CLEAR_RUNNING">FALSE</field> <value name="VALUE"> <block type="text_getSubstring" id="SoSk(7CqUhz`ZyLGzQqq"> <mutation at1="false" at2="true"></mutation> <field name="WHERE1">FIRST</field> <field name="WHERE2">FROM_END</field> <value name="STRING"> <block type="variables_get" id="3n4R/lu:muWx+8H!/CBL"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> </block> </value> <value name="AT2"> <block type="math_number" id="cW%h]Kj1]K5|wsAeyxUJ"> <field name="NUM">2</field> </block> </value> </block> </value> </block> </next> </block> </next> </block> </next> </block> </statement> <next> <block type="controls_if" id="_![^=ag,PI?f4M`f4]%L"> <value name="IF0"> <block type="logic_operation" id=")Mse50nCFm}LN+ACgs(D"> <field name="OP">AND</field> <value name="A"> <block type="logic_compare" id="IB?J{(4i[MyXizL3?1-V"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="y5#Y:xO.720)ZouQJ__0"> <field name="ATTR">val</field> <field name="OID">mihome-vacuum.0.info.state</field> </block> </value> <value name="B"> <block type="math_number" id="B}X[*vc9qqa:|~nk8[k)"> <field name="NUM">6</field> </block> </value> </block> </value> <value name="B"> <block type="logic_compare" id="|Aqyn-?`=Qc)t+mRa,4{"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="o/C;twO{!UnuU?1Z1Euj"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="#t*pyH.@+xDow#IveEUa"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="N%]!(6:oYcTcGN;fx3]!"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.pause</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="VNVr.jFS#Z|R@!FtAzEA"> <field name="BOOL">TRUE</field> </block> </value> <next> <block type="variables_set" id="oo%SmC!8sb7OaZZ[,GbZ"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> <value name="VALUE"> <block type="text_join" id="A.fG#U%z@Q}i|p%a=6;U"> <mutation items="3"></mutation> <value name="ADD0"> <block type="variables_get" id="sBA9mE0d:a+0k(`SM-)."> <field name="VAR" id="![*U^yoiQy}#OpB-KNZZ" variabletype="">Badezimmer1</field> </block> </value> <value name="ADD1"> <block type="variables_get" id="b%WHc33pnf+e=w|dnPY?"> <field name="VAR" id="W5^D4IEYa#}p]qmSx3tw" variabletype="">Badezimmer2</field> </block> </value> <value name="ADD2"> <block type="variables_get" id="S|{E4[92t3T(p(Tba(lQ"> <field name="VAR" id="pS)E,EGzvESC,L}rBk/X" variabletype="">Eingang</field> </block> </value> </block> </value> <next> <block type="control" id="X5=x+qn*E$l2f6b55unk"> <mutation delay_input="true"></mutation> <field name="OID">mihome-vacuum.0.control.zoneClean</field> <field name="WITH_DELAY">TRUE</field> <field name="DELAY_MS">2000</field> <field name="UNIT">ms</field> <field name="CLEAR_RUNNING">FALSE</field> <value name="VALUE"> <block type="text_getSubstring" id="VT%v(ZET.r5+Rt`f69%3"> <mutation at1="false" at2="true"></mutation> <field name="WHERE1">FIRST</field> <field name="WHERE2">FROM_END</field> <value name="STRING"> <block type="variables_get" id="#^Ve?i?l1KOM!k#ay@`o"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> </block> </value> <value name="AT2"> <block type="math_number" id="OG(yUHq4kg_FW4Rhxla%"> <field name="NUM">2</field> </block> </value> </block> </value> <next> <block type="timeouts_settimeout" id="96x:qn{s)q!Q@*BY#Cbd"> <field name="NAME">timeout2</field> <field name="DELAY">2000</field> <field name="UNIT">ms</field> <statement name="STATEMENT"> <block type="control" id="!F:nw$HUz,5W,s)7wpe?"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="?stB%E^p^TktGM(2/iT5"> <field name="BOOL">FALSE</field> </block> </value> </block> </statement> </block> </next> </block> </next> </block> </next> </block> </statement> <next> <block type="comment" id="GIls=|^jng,VyA|G`v5@"> <field name="COMMENT">Zonenreinigung</field> <next> <block type="controls_if" id="v,w,lxZA{`U5jH%sZ9_+"> <value name="IF0"> <block type="logic_compare" id="6!u-k;8g{}iZ@]7a:q},"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="fXTWVtjZ~Mu.=MBRia!V"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Zonenreinigung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="BnMgWHPrSq]gels9RJCi"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> <statement name="DO0"> <block type="variables_set" id="e/X`JuuUzE-2Q2WGR@3%"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> <value name="VALUE"> <block type="text_join" id="v)Ty`_}=vh}T)lohOva8"> <mutation items="9"></mutation> <value name="ADD0"> <block type="logic_ternary" id="y33mza~;IB5bwI+BdTx0"> <value name="IF"> <block type="get_value" id="i/xE_.D~T[.VN|R7h2*9"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Wohnzimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="*_@O}iU(+E%5DLs!FhAh"> <field name="VAR" id="H5jM!d-6fer30oMoMTOL" variabletype="">Wohnzimmer</field> </block> </value> </block> </value> <value name="ADD1"> <block type="logic_ternary" id="^lQ617?`OzvT~,R3I3A-"> <value name="IF"> <block type="get_value" id="]40PB|y@ymL)yDb%~wK4"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Arbeitszimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="M8yASo)b*]Ni!m*m:t|("> <field name="VAR" id="-M/PPIWr7NY[r%Jw1vXb" variabletype="">Arbeitszimmer</field> </block> </value> </block> </value> <value name="ADD2"> <block type="logic_ternary" id="c~jGl7ubHD*hHe7eB:cE"> <value name="IF"> <block type="get_value" id="Tc(%d+khX_!ggfH]=ZHY"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kueche</field> </block> </value> <value name="THEN"> <block type="variables_get" id="_+~P}9ZEK6EHUO9m`//6"> <field name="VAR" id=":%U|iH-0aK@J*xqmm2$s" variabletype="">Kueche</field> </block> </value> </block> </value> <value name="ADD3"> <block type="logic_ternary" id="8!H8{A]F9/7{C:a5p@+d"> <value name="IF"> <block type="get_value" id="fWW.d.#7^CWllQ(Wj)qo"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kuechenblock</field> </block> </value> <value name="THEN"> <block type="variables_get" id="ExT1my.vc6/i[f!or8nc"> <field name="VAR" id="qlPh|Kcns,Le0OjrSr~Q" variabletype="">Kuechenblock</field> </block> </value> </block> </value> <value name="ADD4"> <block type="logic_ternary" id="::uCup#-8NBu=T8?NS[a"> <value name="IF"> <block type="get_value" id="4zavc5=]*D)hyugS6%Mv"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kinderzimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="Mn1JBI8WIpTj+?E{qy;N"> <field name="VAR" id="TWx.F5)_#a0_W/gb6CbH" variabletype="">Kinderzimmer</field> </block> </value> </block> </value> <value name="ADD5"> <block type="logic_ternary" id="!+nVJSywWsdz(M.xXPK!"> <value name="IF"> <block type="get_value" id="9a_^QM$y]nmI%rtC,m=5"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Schlafzimmer</field> </block> </value> <value name="THEN"> <block type="variables_get" id="PC*FG7mqGLSw)n2Ht@_}"> <field name="VAR" id="%D}S:Ibzy1[a1-6)Yk}K" variabletype="">Schlafzimmer</field> </block> </value> </block> </value> <value name="ADD6"> <block type="logic_ternary" id="PBGf*kP_JHi7SiKSEn;Q"> <value name="IF"> <block type="get_value" id="4Nu}@=#]R#svmapS]Chi"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer1</field> </block> </value> <value name="THEN"> <block type="variables_get" id="NeLB6-52iOmm@{eO,h2n"> <field name="VAR" id="![*U^yoiQy}#OpB-KNZZ" variabletype="">Badezimmer1</field> </block> </value> </block> </value> <value name="ADD7"> <block type="logic_ternary" id="Irqm{s-P:3nzxa0wC+!("> <value name="IF"> <block type="get_value" id="?*1pGQy-YhGI(k8~oqHo"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> </block> </value> <value name="THEN"> <block type="variables_get" id="BE]6ZGB705-gz3Oh)br4"> <field name="VAR" id="W5^D4IEYa#}p]qmSx3tw" variabletype="">Badezimmer2</field> </block> </value> </block> </value> <value name="ADD8"> <block type="logic_ternary" id="]_|$2G.(sXz]K=Q4?-W%"> <value name="IF"> <block type="get_value" id="hIU0QPCNqz)Rc5CJOTq~"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Eingang</field> </block> </value> <value name="THEN"> <block type="variables_get" id="72qhPGm2_V$ug~O::8`s"> <field name="VAR" id="pS)E,EGzvESC,L}rBk/X" variabletype="">Eingang</field> </block> </value> </block> </value> </block> </value> <next> <block type="control" id="-TH|!h,pr~qYQRQ1z^+B"> <mutation delay_input="true"></mutation> <field name="OID">mihome-vacuum.0.control.zoneClean</field> <field name="WITH_DELAY">TRUE</field> <field name="DELAY_MS">2000</field> <field name="UNIT">ms</field> <field name="CLEAR_RUNNING">FALSE</field> <value name="VALUE"> <block type="text_getSubstring" id="4?4~VI.8}ICa=S+3_/cp"> <mutation at1="false" at2="true"></mutation> <field name="WHERE1">FIRST</field> <field name="WHERE2">FROM_END</field> <value name="STRING"> <block type="variables_get" id="+J6J)VMD)*SLgSS|mA[L"> <field name="VAR" id="?338$LOCRmXqk%RE}N95" variabletype="">Zone</field> </block> </value> <value name="AT2"> <block type="math_number" id="lMW#3.1_0w^EeJ:nH-,}"> <field name="NUM">2</field> </block> </value> </block> </value> <next> <block type="timeouts_settimeout" id="g3ANAKnHZhK%{lywco;G"> <field name="NAME">timeout3</field> <field name="DELAY">2000</field> <field name="UNIT">ms</field> <statement name="STATEMENT"> <block type="procedures_callnoreturn" id="bl|_D]BU;m;![b|CE=tD"> <mutation name="State_reset"></mutation> <next> <block type="control" id="5Ffm~QQzNj[*LR~3vW/C"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Zonenreinigung</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="oBUibo;ny}etEM(qw4f,"> <field name="BOOL">FALSE</field> </block> </value> </block> </next> </block> </statement> </block> </next> </block> </next> </block> </statement> </block> </next> </block> </next> </block> </next> </block> </next> </block> </statement> <next> <block type="comment" id="4SL7A$BJWd8aSJIV4NC_"> <field name="COMMENT">Mülleimer</field> <next> <block type="on_ext" id="k/RM8fOgR]I|]*u+2[zC"> <mutation items="1"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="XUr@Yx.}}pK`gCj5PAn*"> <field name="oid">default</field> </shadow> <block type="field_oid" id="_ytw!lj%eq}{yz}=6lYS"> <field name="oid">mihome-vacuum.0.info.state</field> </block> </value> <statement name="STATEMENT"> <block type="controls_if" id="GV=@:(rB=!y~MV:**O2l"> <value name="IF0"> <block type="logic_operation" id="FUH]1anMDJ,/Y-M@AE8G" inline="false"> <field name="OP">AND</field> <value name="A"> <block type="logic_compare" id="enK-TSGXHSaF9ZcuSnBK"> <field name="OP">EQ</field> <value name="A"> <block type="on_source" id="1EA|hPYjL~GgA~@9|a,+"> <field name="ATTR">state.val</field> </block> </value> <value name="B"> <block type="math_number" id="9q[rY?t!I0+pMR=){A;]"> <field name="NUM">6</field> </block> </value> </block> </value> <value name="B"> <block type="logic_operation" id="47Xd]5yDkd{9X$x^wZuQ" inline="false"> <field name="OP">AND</field> <value name="A"> <block type="logic_compare" id="??/L@.%:q0VmNU?r^25h"> <field name="OP">EQ</field> <value name="A"> <block type="get_value" id="r!0tYv3LA]OJ^d[[tV7b"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Start.Wohnung</field> </block> </value> <value name="B"> <block type="logic_boolean" id="WYmV2|@--*C=YimRx]$-"> <field name="BOOL">FALSE</field> </block> </value> </block> </value> <value name="B"> <block type="logic_compare" id="pxxy7cXZ*yD+YRjDv8_4"> <field name="OP">GTE</field> <value name="A"> <block type="get_value" id=":;tIfb,z6,%TYs!F7g)W"> <field name="ATTR">val</field> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Info.Staubbehaelter</field> </block> </value> <value name="B"> <block type="math_number" id="iycLg1#2$5dof4VrE9Z_"> <field name="NUM">90</field> </block> </value> </block> </value> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="ytm=n77c~p?jRQwZ1G9f"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.pause</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="zVlQ?7+A@Ws5L%4DWqFW"> <field name="BOOL">TRUE</field> </block> </value> <next> <block type="control" id="h/aiY0=nVAS@MZZ]9JvT"> <mutation delay_input="false"></mutation> <field name="OID">mihome-vacuum.0.control.goTo</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="text" id="^=$;?Ee4zo[e%E-jT[=S"> <field name="TEXT">24900,25500</field> </block> </value> <next> <block type="timeouts_settimeout" id="~Z[.EjoHlP@Cuzckh[:E"> <field name="NAME">timeout</field> <field name="DELAY">2000</field> <field name="UNIT">ms</field> <statement name="STATEMENT"> <block type="control" id="}._cRm]pDhpi5xKA/mW`"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Info.Staubbehaelter</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="math_number" id="KGx$@%M46^%`OSzs0+Mt"> <field name="NUM">0</field> </block> </value> </block> </statement> </block> </next> </block> </next> </block> </statement> </block> </statement> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> <block type="procedures_defnoreturn" id="/=xI^u`R$@J)r[w+txx*" collapsed="true" x="-262" y="-1362"> <field name="NAME">State_reset</field> <comment pinned="false" h="80" w="160">Beschreibe diese Funktion …</comment> <statement name="STACK"> <block type="control" id="0xyak8u^:zS{FR`B$$oP"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Wohnzimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="_,@$OI_U[Nw*dhZv0I!#"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="kCx9Z*57e-O_3jOOSmxl"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Arbeitszimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="|O5B+nNx{@)k:R%#,Xuj"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="tcMzai^]4V!=_)jZ2hT*"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kueche</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="*UWSlp(#oDuvYe+V5Xix"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="2aR:H_YSn?LdN68`gai6"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kuechenblock</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="5tXVFxwCEX+;^:G/-avO"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="1M96,p=+T9/cLKxy*wv~"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Kinderzimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="ea7-A:UM::aoN7548ug)"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="1dw,h.nRHH4a[0xNhV(t"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Schlafzimmer</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="Sxe;ZrEH8oU^m*7bu/V5"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="o-DfI7uJ.!xhKE0M2L/L"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer1</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="~6eAjO7%G-n8}z#JKey%"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="}8a_(a_ipwmY:!1XbMZb"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="FZ}yKw*JQYpMv/?aJ?2{"> <field name="BOOL">FALSE</field> </block> </value> <next> <block type="control" id="-@bExkz=rlBa-A+y|TV4"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Eingang</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="{6H!0LpXcuI2)J9*,Qf)"> <field name="BOOL">FALSE</field> </block> </value> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </next> </block> </statement> </block> <block type="comment" id="Gw2WBZOOt_*1`l7pbMxd" x="-262" y="-1337"> <field name="COMMENT">Bad zweigeteilt</field> <next> <block type="on_ext" id="+dL/1oJfy}3$%agDgy,/" collapsed="true"> <mutation items="1"></mutation> <field name="CONDITION">ne</field> <field name="ACK_CONDITION"></field> <value name="OID0"> <shadow type="field_oid" id="=mXzU`}Iv4(VG-(c`~C]"> <field name="oid">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer1</field> </shadow> </value> <statement name="STATEMENT"> <block type="controls_if" id="j}@-/3tA?Ux_4);`5;Y)"> <mutation else="1"></mutation> <value name="IF0"> <block type="logic_compare" id="phRG-|uQ###cZU5f-ZAu"> <field name="OP">EQ</field> <value name="A"> <block type="on_source" id="dGunY:ecMVCrNExqbUUk"> <field name="ATTR">state.val</field> </block> </value> <value name="B"> <block type="logic_boolean" id="28d=DevcP(q8!P.+8)DC"> <field name="BOOL">TRUE</field> </block> </value> </block> </value> <statement name="DO0"> <block type="control" id="7FT?iiFQp)RhmJU)bK]z"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="LadKXJjTc:!*x%PV58+H"> <field name="BOOL">TRUE</field> </block> </value> </block> </statement> <statement name="ELSE"> <block type="control" id="DJWA+Ty0xX|gZE[55o5]"> <mutation delay_input="false"></mutation> <field name="OID">Eigene_Datenpunkte.0.Staubsauger.Zonen.Badezimmer2</field> <field name="WITH_DELAY">FALSE</field> <value name="VALUE"> <block type="logic_boolean" id="MtNAtd-fN_rC.P:+-n4K"> <field name="BOOL">FALSE</field> </block> </value> </block> </statement> </block> </statement> </block> </next> </block> </xml> -
@seppel786 da wird geprüft, ob der Roboter nach 60 min immer noch läuft. Wenn ja hängt er irgendwo und soll stehen bleiben. Das hab ich hin und wieder wenn er am Eck vom Teppich hängen bleibt. Leider ist mit der Zonenreinigung die Intelligenz beim Teufel...
-
Edit: Beitrag im neuen Vacuum Adapter 2.0 gepostet (verschoben)
https://forum.iobroker.net/post/445731HM&HMIP über 100 Geräte + IoBroker auf DS918+ uvm.
-
@seppel786 der Richtigkeit halber sollte der timeout4 gestoppt werden wenn der Status 8 ist.
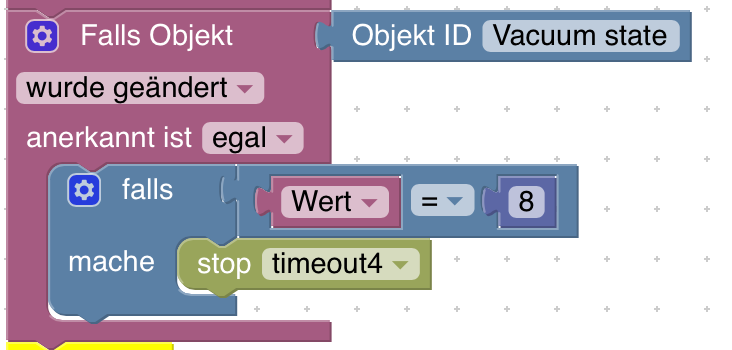
-
All vacuum cleaners operate based on air flowing from the opening at the cleaning head or tool, through the best and most powerful canister vacuum and the bag and/or filter system and then out the exhaust port.
-
Wie habt ihr das gelöst, dass es eine Rückmeldung gibt, dass der Roboter fertig ist mit der Reinigung? Ich sehe keinen Datenpunkt dazu
-
Wie habt ihr das gelöst, dass es eine Rückmeldung gibt, dass der Roboter fertig ist mit der Reinigung? Ich sehe keinen Datenpunkt dazu
@JohnnyBahama mit was willst Du darauf reagieren? Willst wissen wann er fertig ist und das in der Vis anzeigen oder andere Aktion starten?
-
Wie habt ihr das gelöst, dass es eine Rückmeldung gibt, dass der Roboter fertig ist mit der Reinigung? Ich sehe keinen Datenpunkt dazu
//-------- Klasse zur wiederholten Ausgabe von Warnungen auf den Lautsprechern ----- function sleep(ms) { return new Promise(resolve => setTimeout(resolve, ms)); } class Repeat_Warning { constructor() { this.text = ""; this.duration = 0; this.repeat = true; this.first_duration = 0; } start(text,duration,first_duration) { this.text = text; this.duration = duration * 60000; this.repeat = true; if (first_duration != undefined) this.first_duration = first_duration* 60000; (async () => { if (this.first_duration != 0) await sleep(this.first_duration); while (this.repeat) { setState("speechout",JSON.stringify({text:this.text,device:"ALL",vol:70})); await sleep(this.duration); } })(); } stop() { this.repeat = false; } } /* ---------------------------- Status Meldungen ---------------------------------- Ausgabe von Telegram und Sprachnachricht, wenn Staubsauger Reinigung abge- schlossen hat. "states": { "0": "Unknown", "1": "Initiating", "2": "Sleeping", "3": "Waiting", "4": "?", "5": "Cleaning", "6": "Back to home", "7": "Manuell mode", "8": "Charging", "9": "Charging Error", "10": "Pause", "11": "Spot Cleaning", "12": "In Error", "13": "Shutting down", "14": "Updating", "15": "Docking", "16": "Going to Spot", "17": "Zone cleaning", "18": "Room cleaning" } */ var vacuum_states = { "0": "hat einen unbekannten Status", "1": "wird initialisiert", "2": "schäft", "3": "wartet", "4": "?", "5": "reinigt", "6": "geht zur Docking Station", "7": "ist im manuellen Modus", "8": "wird geladen", "9": "hat einen Ladefehler", "10": "hat Pause", "11": "führt Punkt Reinigung durch", "12": "hat einen Fehlerzustand", "13": "wird heruntergefahren", "14": "wird upgedatet", "15": "verbindet sich mit der Docking Station", "16": "geht zum Zielpunkt", "17": "reinigt den ausgewählten Bereich", "18": "reinigt den Raum" }; var sauger_path = "javascript.0.sauger."; var sauger_status = sauger_path + "status"; createState(sauger_status,''); on({id:"mihome-vacuum.0.info.state", change: 'ne'}, function(obj) { var state = getState("mihome-vacuum.0.info.state").val; if ((state >= 0) && (state <= 18)) { setState(sauger_status,vacuum_states[state]); setState("speechout",JSON.stringify({text:"Staubsauger " + vacuum_states[state] + '!',device:"HausohneKZ",vol:70})); } }); //------------------------- Fehler beim Reinigen ---------------------------------- //Einmalige Benachrichtung per Telegram und wiederholte Ausgabe von Sprach- //nachricht, dass Staubsauger einen Fehler hat /* "states": { "0": "No error", "1": "Laser distance sensor error", "2": "Collision sensor error", "3": "Wheels on top of void, move robot", "4": "Clean hovering sensors, move robot", "5": "Clean main brush", "6": "Clean side brush", "7": "Main wheel stuck?", "8": "Device stuck, clean area", "9": "Dust collector missing", "10": "Clean filter", "11": "Stuck in magnetic barrier", "12": "Low battery", "13": "Charging fault", "14": "Battery fault", "15": "Wall sensors dirty, wipe them", "16": "Place me on flat surface", "17": "Side brushes problem, reboot me", "18": "Suction fan problem", "19": "Unpowered charging station" } */ var vacuum_error_states = { "0": "Es liegt kein Fehler vor.", "1": "Laserabstandsmessung hat einen Fehler.", "2": "Der Kollisionssensor hat einen Fehler.", "3": "Die Räder sind auf der Spitze eines Hindernisses.", "4": "Die Sensoren zur Stufenerkennung sind unsauber.", "5": "Die Hauptbürste muss gereinigt werden.", "6": "Die Seitenbürste muss gereinigt werden.", "7": "Das Hauptantriebsrad ist verklemmt.", "8": "Der Staubsauger ist verklemmt.", "9": "Der Staubbehälter fehlt.", "10": "Der Filter muss gereinigt werden.", "11": "Ein magnetisches Hindernis hat blockiert.", "12": "Der Akku hat keine Ladung.", "13": "Das Laden ist fehlerhaft.", "14": "Der Akku hat einen Fehler.", "15": "Die Wandsensoren sind schmutzig und müssen gereinigt werden.", "16": "Der Untergrund ist zu steil.", "17": "Die Seitebürste hat ein Problem. Staubsauger neustarten!", "18": "Der Saugventilator hat ein Problem.", "19": "Die Ladestation hat keinen Strom." }; var sauger_error = sauger_path + "error"; createState(sauger_error,''); var Saugerladen_Fehler = new Repeat_Warning(); on({id:"mihome-vacuum.0.info.error", change: 'ne'}, function(obj) { var state = getState("mihome-vacuum.0.info.error").val; if ((state >= 1) && (state <= 19)) { setState(sauger_error,vacuum_error_states[state]); Saugerladen_Fehler.start("Staubsaugerfehler: " + vacuum_error_states[state] + '!',15); } else if (state == 0) { Saugerladen_Fehler.stop(); setState(sauger_error,vacuum_error_states[state]); } }); //------------------------- Verschleißteile melden ---------------------------------- //Einmalige Benachrichtung per Telegram bei verschleiß var sauger_wearout = "javascript.0.sauger.wearout"; createState(sauger_wearout,''); function wearout(id,text) { if (getState(id).val < 5) { setState("speechout",JSON.stringify({text:text,device:"HausohneKZ",vol:70})); setState('Botschaft', text); setState(sauger_wearout, text); } else setState(sauger_wearout, "OK"); } on({id:"mihome-vacuum.0.consumable.filter", change: 'ne'}, function(obj) { wearout("mihome-vacuum.0.consumable.filter","Der Filter ist verschlissen!"); }); on({id:"mihome-vacuum.0.consumable.main_brush", change: 'ne'}, function(obj) { wearout("mihome-vacuum.0.consumable.main_brush","Die Hauptbürste ist verschlissen!"); }); on({id:"mihome-vacuum.0.consumable.sensors", change: 'ne'}, function(obj) { wearout("mihome-vacuum.0.consumable.sensors","Die Sensoren müssen gereinigt werden!"); }); on({id:"mihome-vacuum.0.consumable.side_brush", change: 'ne'}, function(obj) { wearout("mihome-vacuum.0.consumable.side_brush","Die Seitenbürste ist verschlissen!"); }); //----------------------- Warnung Saubsauger zu lange online ----------------------- var Sauger_lange_an = new Repeat_Warning(); on({ id: "mihome-vacuum.0.info.connection", change: 'gt' }, function (obj) { Sauger_lange_an.start("Der Staubsauger sollte abgeschaltet werden!",30,5*60) setState(sauger_status,'online'); }); on({ id: "mihome-vacuum.0.info.connection", change: 'lt' }, function (obj) { Sauger_lange_an.stop(); Saugerladen_zu_ende_warning.stop(); setState(sauger_path + "Putzdatum",new Date().toISOString().slice(0,10)); past(); setState(sauger_status,'offline'); }); //------------------------- Laden abgeschlossen ---------------------------------- var Saugerladen_zu_ende_warning = new Repeat_Warning(); on({id:"mihome-vacuum.0.info.battery", change: 'ne'}, function(obj) { if (getState("mihome-vacuum.0.info.battery").val === 100) Saugerladen_zu_ende_warning.start("Der Staubsauger ist aufgeladen und kann abgeschaltet werden!",30); }); //------------------------- Putzdatum und vergangene Zeit aktualisieren ---------- createState(sauger_path + "Putzdatum",'2020-05-01'); createState(sauger_path + "Putzdatum_formatiert",'am 01.05.2020 (vor 1 Tagen)'); function past() { var last_date = getState(sauger_path + "Putzdatum").val; var last_date_format = last_date.slice(0,10).split("-"); var last_date_german = last_date_format[2] + "." + last_date_format[1] + "." + last_date_format[0]; var vergangen = Math.floor((new Date().getTime() - new Date(last_date).getTime())/(24*60*60*1000)); setState(sauger_path + "Putzdatum_formatiert",last_date_german + " vor " + vergangen + " Tagen"); } past(); on({time: {hour: 10, minute: 0}}, function(obj){past()});HW:NUC (16 GB Ram)
OS: Debian Bullseye, Promox V7, node v16.x npm 8.19.3 -
@JohnnyBahama mit was willst Du darauf reagieren? Willst wissen wann er fertig ist und das in der Vis anzeigen oder andere Aktion starten?
@der-eine Ich habe mir ein zyklisches blockly gebaut, indem der Sauger nur läuft wenn keiner zu Hause ist und mehr als 48Std nach der letzten komplett Reinigung vergangen sind. Jetzt kann es vorkommen, dass jemand während der Reinigung nach Hause kommt und dadurch der Sauger seinen Dienst unterbricht, indem er wieder zur Station geschickt wird mit GoHome Datenpunkt. Nachteil, er kann nicht mehr losgeschickt werden, um dort weiter zu machen, wo er aufgehört hat.
Leider hat sich der selbsterstellte Datenpunkt ´Wohnung gereinigt` wegen dem Startskript schon auf true gesetzt, also fährt er kein zweites Mal raus bis wieder alle Bedingungen erfüllt sind. Was dazu führt, das er erst wieder in zwei tagen fährt. Daher würde ich den Datenpunkt Wohnung gereingt vom Roboter haben wollen, um eine Prüfsumme zu haben.Momentan probiere ich rum und glaube ich könnte es umgehen, wenn ich ihn erst an eine Koordinate schicke und dann auf Pause setze. Aber auch hier müsste ich dann wissen, wann er fertig ist, um die nächste Startzeit zu bekommen.
-
//-------- Klasse zur wiederholten Ausgabe von Warnungen auf den Lautsprechern ----- function sleep(ms) { return new Promise(resolve => setTimeout(resolve, ms)); } class Repeat_Warning { constructor() { this.text = ""; this.duration = 0; this.repeat = true; this.first_duration = 0; } start(text,duration,first_duration) { this.text = text; this.duration = duration * 60000; this.repeat = true; if (first_duration != undefined) this.first_duration = first_duration* 60000; (async () => { if (this.first_duration != 0) await sleep(this.first_duration); while (this.repeat) { setState("speechout",JSON.stringify({text:this.text,device:"ALL",vol:70})); await sleep(this.duration); } })(); } stop() { this.repeat = false; } } /* ---------------------------- Status Meldungen ---------------------------------- Ausgabe von Telegram und Sprachnachricht, wenn Staubsauger Reinigung abge- schlossen hat. "states": { "0": "Unknown", "1": "Initiating", "2": "Sleeping", "3": "Waiting", "4": "?", "5": "Cleaning", "6": "Back to home", "7": "Manuell mode", "8": "Charging", "9": "Charging Error", "10": "Pause", "11": "Spot Cleaning", "12": "In Error", "13": "Shutting down", "14": "Updating", "15": "Docking", "16": "Going to Spot", "17": "Zone cleaning", "18": "Room cleaning" } */ var vacuum_states = { "0": "hat einen unbekannten Status", "1": "wird initialisiert", "2": "schäft", "3": "wartet", "4": "?", "5": "reinigt", "6": "geht zur Docking Station", "7": "ist im manuellen Modus", "8": "wird geladen", "9": "hat einen Ladefehler", "10": "hat Pause", "11": "führt Punkt Reinigung durch", "12": "hat einen Fehlerzustand", "13": "wird heruntergefahren", "14": "wird upgedatet", "15": "verbindet sich mit der Docking Station", "16": "geht zum Zielpunkt", "17": "reinigt den ausgewählten Bereich", "18": "reinigt den Raum" }; var sauger_path = "javascript.0.sauger."; var sauger_status = sauger_path + "status"; createState(sauger_status,''); on({id:"mihome-vacuum.0.info.state", change: 'ne'}, function(obj) { var state = getState("mihome-vacuum.0.info.state").val; if ((state >= 0) && (state <= 18)) { setState(sauger_status,vacuum_states[state]); setState("speechout",JSON.stringify({text:"Staubsauger " + vacuum_states[state] + '!',device:"HausohneKZ",vol:70})); } }); //------------------------- Fehler beim Reinigen ---------------------------------- //Einmalige Benachrichtung per Telegram und wiederholte Ausgabe von Sprach- //nachricht, dass Staubsauger einen Fehler hat /* "states": { "0": "No error", "1": "Laser distance sensor error", "2": "Collision sensor error", "3": "Wheels on top of void, move robot", "4": "Clean hovering sensors, move robot", "5": "Clean main brush", "6": "Clean side brush", "7": "Main wheel stuck?", "8": "Device stuck, clean area", "9": "Dust collector missing", "10": "Clean filter", "11": "Stuck in magnetic barrier", "12": "Low battery", "13": "Charging fault", "14": "Battery fault", "15": "Wall sensors dirty, wipe them", "16": "Place me on flat surface", "17": "Side brushes problem, reboot me", "18": "Suction fan problem", "19": "Unpowered charging station" } */ var vacuum_error_states = { "0": "Es liegt kein Fehler vor.", "1": "Laserabstandsmessung hat einen Fehler.", "2": "Der Kollisionssensor hat einen Fehler.", "3": "Die Räder sind auf der Spitze eines Hindernisses.", "4": "Die Sensoren zur Stufenerkennung sind unsauber.", "5": "Die Hauptbürste muss gereinigt werden.", "6": "Die Seitenbürste muss gereinigt werden.", "7": "Das Hauptantriebsrad ist verklemmt.", "8": "Der Staubsauger ist verklemmt.", "9": "Der Staubbehälter fehlt.", "10": "Der Filter muss gereinigt werden.", "11": "Ein magnetisches Hindernis hat blockiert.", "12": "Der Akku hat keine Ladung.", "13": "Das Laden ist fehlerhaft.", "14": "Der Akku hat einen Fehler.", "15": "Die Wandsensoren sind schmutzig und müssen gereinigt werden.", "16": "Der Untergrund ist zu steil.", "17": "Die Seitebürste hat ein Problem. Staubsauger neustarten!", "18": "Der Saugventilator hat ein Problem.", "19": "Die Ladestation hat keinen Strom." }; var sauger_error = sauger_path + "error"; createState(sauger_error,''); var Saugerladen_Fehler = new Repeat_Warning(); on({id:"mihome-vacuum.0.info.error", change: 'ne'}, function(obj) { var state = getState("mihome-vacuum.0.info.error").val; if ((state >= 1) && (state <= 19)) { setState(sauger_error,vacuum_error_states[state]); Saugerladen_Fehler.start("Staubsaugerfehler: " + vacuum_error_states[state] + '!',15); } else if (state == 0) { Saugerladen_Fehler.stop(); setState(sauger_error,vacuum_error_states[state]); } }); //------------------------- Verschleißteile melden ---------------------------------- //Einmalige Benachrichtung per Telegram bei verschleiß var sauger_wearout = "javascript.0.sauger.wearout"; createState(sauger_wearout,''); function wearout(id,text) { if (getState(id).val < 5) { setState("speechout",JSON.stringify({text:text,device:"HausohneKZ",vol:70})); setState('Botschaft', text); setState(sauger_wearout, text); } else setState(sauger_wearout, "OK"); } on({id:"mihome-vacuum.0.consumable.filter", change: 'ne'}, function(obj) { wearout("mihome-vacuum.0.consumable.filter","Der Filter ist verschlissen!"); }); on({id:"mihome-vacuum.0.consumable.main_brush", change: 'ne'}, function(obj) { wearout("mihome-vacuum.0.consumable.main_brush","Die Hauptbürste ist verschlissen!"); }); on({id:"mihome-vacuum.0.consumable.sensors", change: 'ne'}, function(obj) { wearout("mihome-vacuum.0.consumable.sensors","Die Sensoren müssen gereinigt werden!"); }); on({id:"mihome-vacuum.0.consumable.side_brush", change: 'ne'}, function(obj) { wearout("mihome-vacuum.0.consumable.side_brush","Die Seitenbürste ist verschlissen!"); }); //----------------------- Warnung Saubsauger zu lange online ----------------------- var Sauger_lange_an = new Repeat_Warning(); on({ id: "mihome-vacuum.0.info.connection", change: 'gt' }, function (obj) { Sauger_lange_an.start("Der Staubsauger sollte abgeschaltet werden!",30,5*60) setState(sauger_status,'online'); }); on({ id: "mihome-vacuum.0.info.connection", change: 'lt' }, function (obj) { Sauger_lange_an.stop(); Saugerladen_zu_ende_warning.stop(); setState(sauger_path + "Putzdatum",new Date().toISOString().slice(0,10)); past(); setState(sauger_status,'offline'); }); //------------------------- Laden abgeschlossen ---------------------------------- var Saugerladen_zu_ende_warning = new Repeat_Warning(); on({id:"mihome-vacuum.0.info.battery", change: 'ne'}, function(obj) { if (getState("mihome-vacuum.0.info.battery").val === 100) Saugerladen_zu_ende_warning.start("Der Staubsauger ist aufgeladen und kann abgeschaltet werden!",30); }); //------------------------- Putzdatum und vergangene Zeit aktualisieren ---------- createState(sauger_path + "Putzdatum",'2020-05-01'); createState(sauger_path + "Putzdatum_formatiert",'am 01.05.2020 (vor 1 Tagen)'); function past() { var last_date = getState(sauger_path + "Putzdatum").val; var last_date_format = last_date.slice(0,10).split("-"); var last_date_german = last_date_format[2] + "." + last_date_format[1] + "." + last_date_format[0]; var vergangen = Math.floor((new Date().getTime() - new Date(last_date).getTime())/(24*60*60*1000)); setState(sauger_path + "Putzdatum_formatiert",last_date_german + " vor " + vergangen + " Tagen"); } past(); on({time: {hour: 10, minute: 0}}, function(obj){past()});@Marty56 Bin in Java nicht so fit, aber ich versuch mich mal reinzufuchsen. Danke dir.
Edit: Ich habe mir das mal angeschaut, sehe aber auch dort keinen Punkt indem der Roboter die Meldung sendet: Reinigung abgeschlossen.
-
@Marty56 Bin in Java nicht so fit, aber ich versuch mich mal reinzufuchsen. Danke dir.
Edit: Ich habe mir das mal angeschaut, sehe aber auch dort keinen Punkt indem der Roboter die Meldung sendet: Reinigung abgeschlossen.
@JohnnyBahama Stimmt!
Der Staubsauger sagt nur, dass er wieder im Standby oder auch an der Dockingstation ist, wenn er mit der Reinigung fertig ist.Man müsste sich also eine kleine Statemachine programmieren, die erst bemerkt, dass der Staubsauger reinigt (das wird ja auch signalisiert) und wenn dann die Meldung kommt, dass Staubsauger in Standby oder an der Dockingstation ist, könnte "Wohnung gereinigt" ausgeben.
HW:NUC (16 GB Ram)
OS: Debian Bullseye, Promox V7, node v16.x npm 8.19.3 -
@der-eine Ich habe mir ein zyklisches blockly gebaut, indem der Sauger nur läuft wenn keiner zu Hause ist und mehr als 48Std nach der letzten komplett Reinigung vergangen sind. Jetzt kann es vorkommen, dass jemand während der Reinigung nach Hause kommt und dadurch der Sauger seinen Dienst unterbricht, indem er wieder zur Station geschickt wird mit GoHome Datenpunkt. Nachteil, er kann nicht mehr losgeschickt werden, um dort weiter zu machen, wo er aufgehört hat.
Leider hat sich der selbsterstellte Datenpunkt ´Wohnung gereinigt` wegen dem Startskript schon auf true gesetzt, also fährt er kein zweites Mal raus bis wieder alle Bedingungen erfüllt sind. Was dazu führt, das er erst wieder in zwei tagen fährt. Daher würde ich den Datenpunkt Wohnung gereingt vom Roboter haben wollen, um eine Prüfsumme zu haben.Momentan probiere ich rum und glaube ich könnte es umgehen, wenn ich ihn erst an eine Koordinate schicke und dann auf Pause setze. Aber auch hier müsste ich dann wissen, wann er fertig ist, um die nächste Startzeit zu bekommen.
@JohnnyBahama um festzustellen ob die ganze Wohnung gereinigt wurde, habe ich die gereinigten qm2 angeschaut. Wenn die über wert x waren, dann wurde die ganze Wohnung gereinigt wenn nicht dann war es nur eine Zonenreinigung. Dieser Wert wird ja pro fahrt generiert.
Edit: Unter dem Punkt Info -> Cleaned Area
dieser wird vor der nächsten Reinigung auf 0 gesetzt.

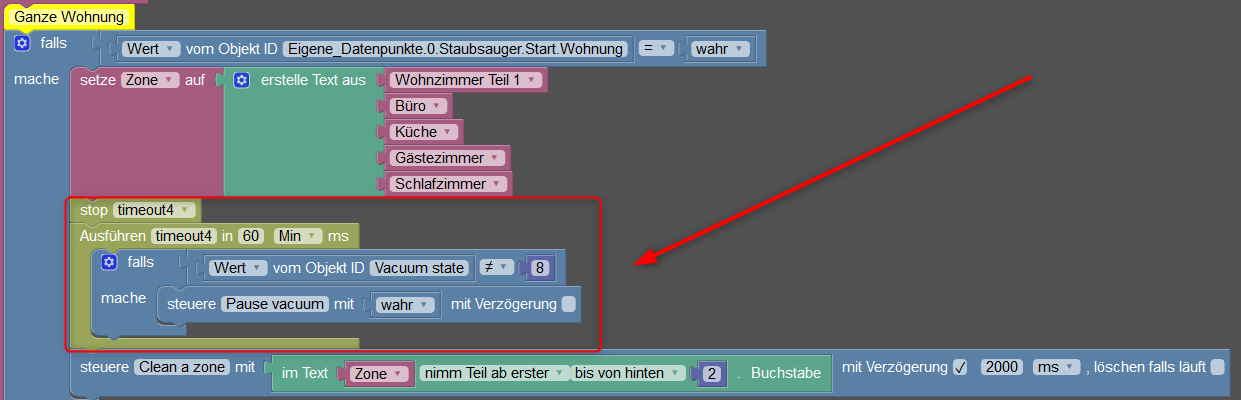
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden366
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge