

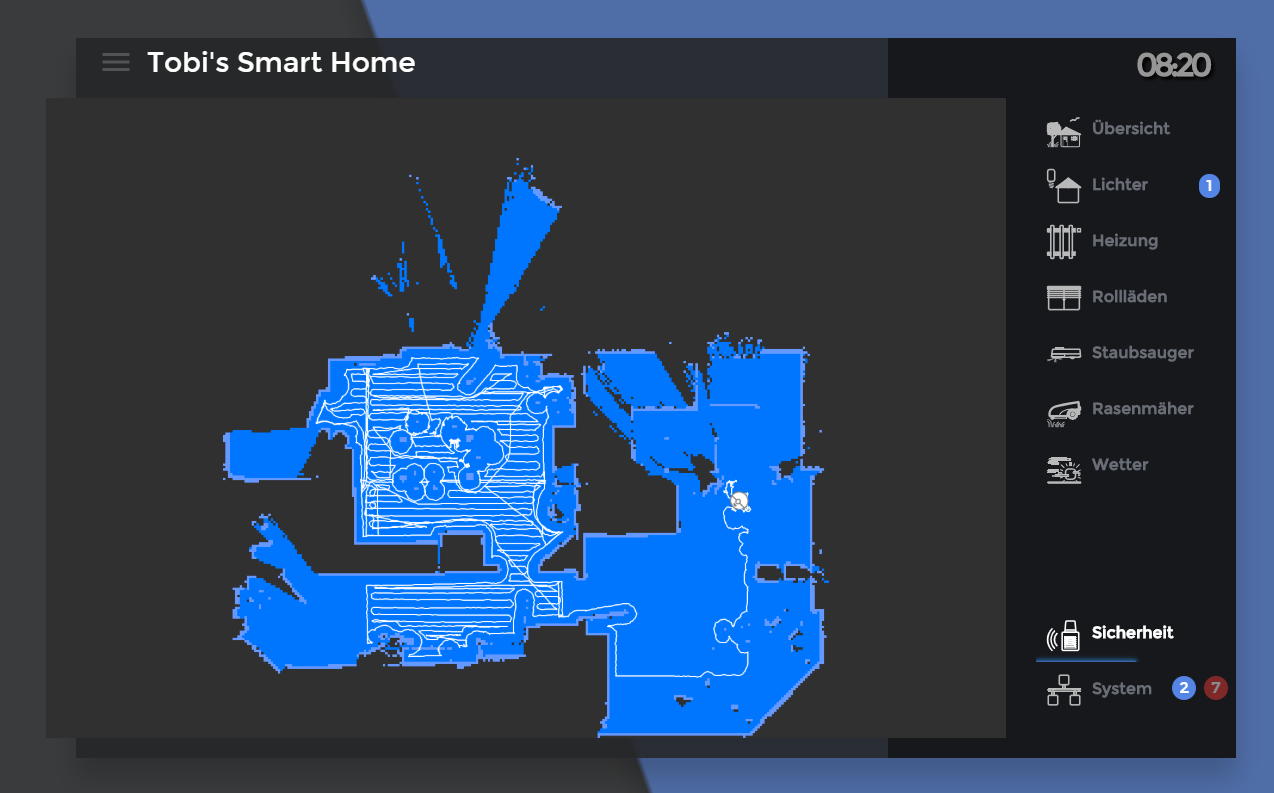
Xiaomi Vacuum (Rockrobo) Saugkarte Live Map

-
@Leviathan09 das hast du falsch, es ist anders rum. Mei meinem Script wird die Karte Erstellung zu iobroker ausgelagert. Wie es beim anderen ist, weiß ich gerade nicht.
@Meistertr dann ist ja alles super

Danke -
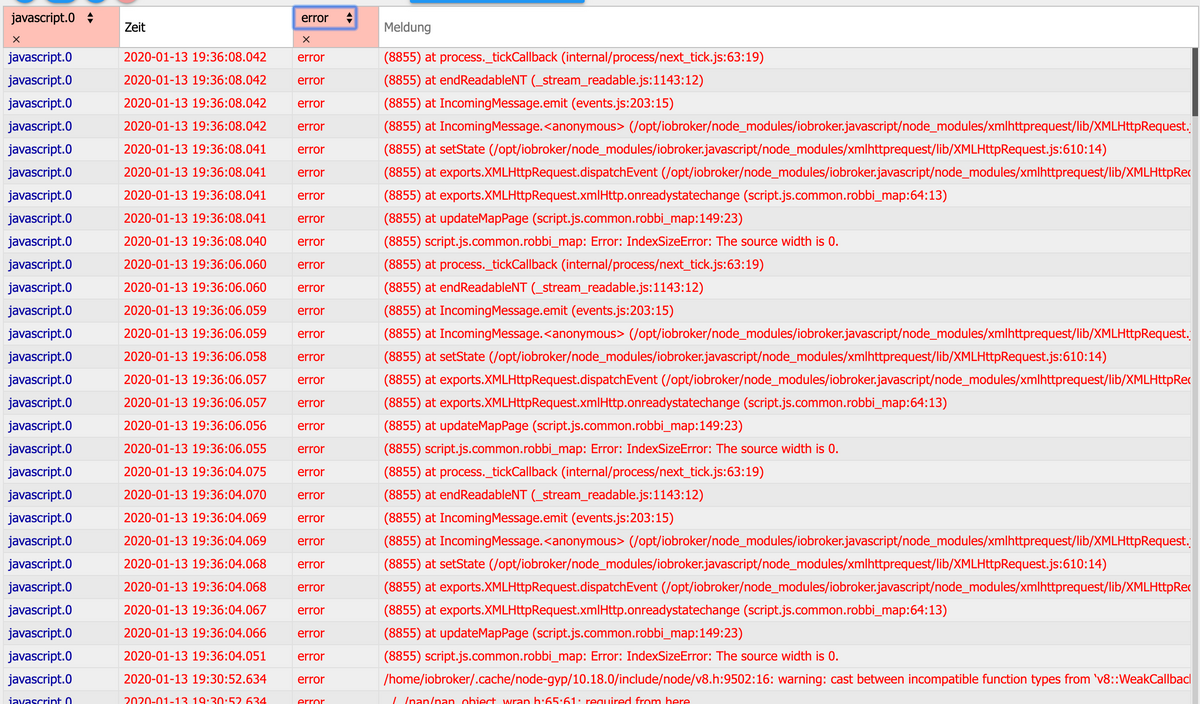
Hi zusammen und vielen Dank für die tolle Arbeit. Bei mir funktioniert die Karte, jedoch bekomme ich im Log extrem viele Errors (siehe Screenshot). Hat jemand eine Idee warum?
-
Hallo Zusammen,
ich bin nun auch ein stolzer xiaomi S6 Besitzer :-) Hab Ihn soweit auch schon im IoBroker drin.
Nur mit der Map in Vis tue ich mir noch sehr schwer, weis überhaupt nicht wo ich da ansetzen soll? Geht das mit dem S6 überhaupt?
Das was in der Anleitung vom Adapter steht mag nicht funktionieren. Und im Netz finde ich nur unterschiedlichste dinge die ich noch per Git installieren soll.
Hat jemand ein brauchbares Tutorial dafür oder kann mir jemand wenigstens mal die grobe Richtung vorgeben damit ich weiß wo ich ansetzen kann?Danke :-)
-
Ist das etwas das für die Zukunft "Kriegsentscheidend" ist?
mihome-vacuum.0 2020-05-01 08:28:39.903 warn (8912) This object will not be created in future versions. Please report this to the developer. mihome-vacuum.0 2020-05-01 08:28:39.901 warn (8912) Object mihome-vacuum.0.info.dnd is invalid: obj.common.type has an invalid value (switch) but has to be one of number, string, boolean, array, object, mixed, file, json -
Auch ich habe ein Script am laufen, das mir nach Beendigung des Saugvorgangs meiner 2 S50 via Alexa und Telegram eine Vollzugsmeldung mit Saugzeitlänge, qm und dem Akkustand sendet. In Telegram hängt er noch eine Map an. Das hat am Anfang gut funktioniert.
In letzter Zeit wundere ich mich warum die Karten immer gleich aussehen obwohl ich unterschiedliche Räume sauge. Die angezeigten Stateswerte passen.
Wenn ich mir das "mihome-vacuum.admin" Verzeichnis anschaue wird mir einiges klar. Hier wird scheinbar schon ewig nichts mehr reingeschrieben.
Hat sich irgendetwas geändert`? Wo bekomme ich die aktuellen Maps her?
Den Screenshot habe ich heute (07.05,) gemacht. Wie man sehen kann wurden die Dateien im Verzeichnis schon ewig nicht mehr aktualisiert.
Weiss jemand Rat?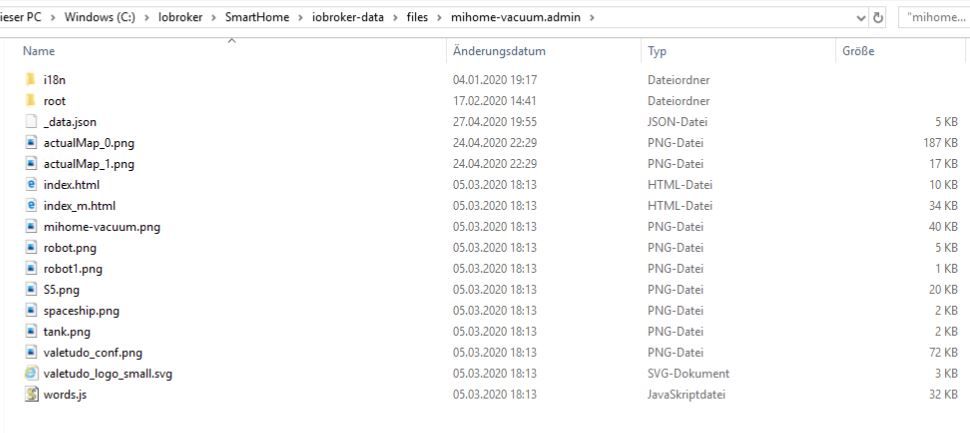
-
Auch ich habe ein Script am laufen, das mir nach Beendigung des Saugvorgangs meiner 2 S50 via Alexa und Telegram eine Vollzugsmeldung mit Saugzeitlänge, qm und dem Akkustand sendet. In Telegram hängt er noch eine Map an. Das hat am Anfang gut funktioniert.
In letzter Zeit wundere ich mich warum die Karten immer gleich aussehen obwohl ich unterschiedliche Räume sauge. Die angezeigten Stateswerte passen.
Wenn ich mir das "mihome-vacuum.admin" Verzeichnis anschaue wird mir einiges klar. Hier wird scheinbar schon ewig nichts mehr reingeschrieben.
Hat sich irgendetwas geändert`? Wo bekomme ich die aktuellen Maps her?
Den Screenshot habe ich heute (07.05,) gemacht. Wie man sehen kann wurden die Dateien im Verzeichnis schon ewig nicht mehr aktualisiert.
Weiss jemand Rat?@DocGame Bei mir liegt die Karte schon immer hier:
/opt/iobroker/iobroker-data/files/mihome-vacuum.admin/actualMap_0.pngIch croppe das PNG sogar und archiviere es dadurch gleich weg. Das archivierte sende ich mir dann und habe so in Telegram und Email keinen unnötigen Weißraum um das Bild.
convert /opt/iobroker/iobroker-data/files/mihome-vacuum.admin/actualMap_0.png -crop 1240x830+350+406 +repage /opt/iobroker_user_data/vacuum/%date%_%room%.png -
@DocGame Bei mir liegt die Karte schon immer hier:
/opt/iobroker/iobroker-data/files/mihome-vacuum.admin/actualMap_0.pngIch croppe das PNG sogar und archiviere es dadurch gleich weg. Das archivierte sende ich mir dann und habe so in Telegram und Email keinen unnötigen Weißraum um das Bild.
convert /opt/iobroker/iobroker-data/files/mihome-vacuum.admin/actualMap_0.png -crop 1240x830+350+406 +repage /opt/iobroker_user_data/vacuum/%date%_%room%.png@Diginix der Pfad ist ja der gleiche (bei mir eben ein Win10 System). Irgendwie speichert der Adapter aber scheinbar keine Werte mehr rein.
Wüste nicht wo man da was einstellen kann. Hat sich bei einem Adapterupdate mal was an dem vorgehen geändert?
Neustart(Adapter und gesamtes System) bringt nichts.... -
@Diginix der Pfad ist ja der gleiche (bei mir eben ein Win10 System). Irgendwie speichert der Adapter aber scheinbar keine Werte mehr rein.
Wüste nicht wo man da was einstellen kann. Hat sich bei einem Adapterupdate mal was an dem vorgehen geändert?
Neustart(Adapter und gesamtes System) bringt nichts....@DocGame Die einzige Anpassung die @Meistertr in der Vergangenheit eingebaut hat, ist die "_0" für die Instanz im Dateinamen des PNG. vorher hieß das Bild nur actualMap.png. Wer aber mehrere Sauger mit mehreren Instanzen betreibt, hatte dann nur die Karte des ersten.
Aber am Pfad selbst hat sich nie etwas geändert. Wenn dort bei dir keine Bilddatei liegt, dann passt da was nicht. -
@DocGame Bei mir liegt die Karte schon immer hier:
/opt/iobroker/iobroker-data/files/mihome-vacuum.admin/actualMap_0.pngIch croppe das PNG sogar und archiviere es dadurch gleich weg. Das archivierte sende ich mir dann und habe so in Telegram und Email keinen unnötigen Weißraum um das Bild.
convert /opt/iobroker/iobroker-data/files/mihome-vacuum.admin/actualMap_0.png -crop 1240x830+350+406 +repage /opt/iobroker_user_data/vacuum/%date%_%room%.png@Diginix Wie mache ich das über Blockly/Script und wie greife ich darauf zu, um die Telegram Nachricht zu bauen? Oder hast Du ein Script auf OS Level, das beides erledigt?
Intel NUC - ioBroker in Proxmox-VM, Zigbee TCP CC2652P2, MG4 Trophy (e-Auto)
-
@Diginix Wie mache ich das über Blockly/Script und wie greife ich darauf zu, um die Telegram Nachricht zu bauen? Oder hast Du ein Script auf OS Level, das beides erledigt?
@oranggila Was genau meinst du? Für Telegram gibt es ein extra sendto Block.
-
@oranggila Was genau meinst du? Für Telegram gibt es ein extra sendto Block.
@Diginix Aber der convert ist doch ein linux Befehl, wie mache ich den in blockly oder JavaScript mit %date% und %raum%, damit ich es danach per sendto Telegram verschicken kann?
Intel NUC - ioBroker in Proxmox-VM, Zigbee TCP CC2652P2, MG4 Trophy (e-Auto)
-
@Diginix Aber der convert ist doch ein linux Befehl, wie mache ich den in blockly oder JavaScript mit %date% und %raum%, damit ich es danach per sendto Telegram verschicken kann?
@oranggila Achso, deswegen fragte ich ja. Aus deiner Frage war kein Bezug zu einem Post von mir zu erkennen.
So sieht das Blockly dazu bei mir aus.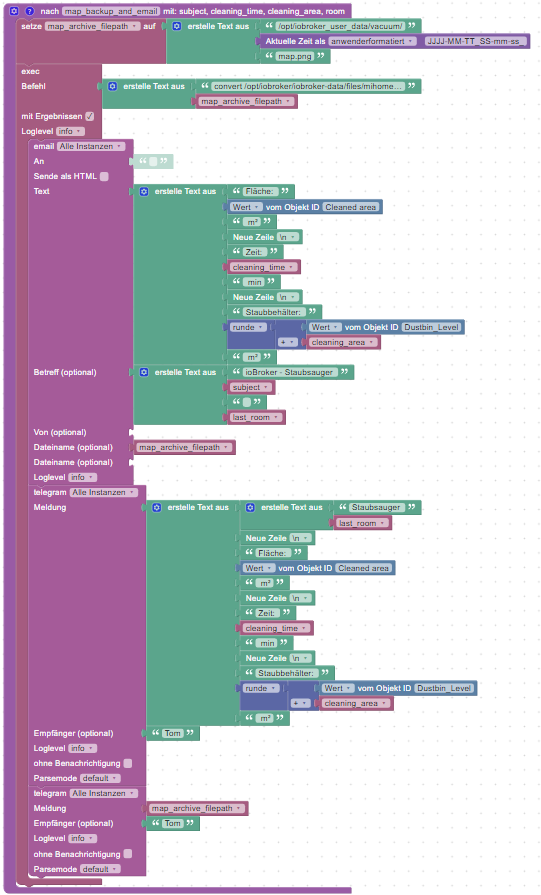
-
@oranggila Achso, deswegen fragte ich ja. Aus deiner Frage war kein Bezug zu einem Post von mir zu erkennen.
So sieht das Blockly dazu bei mir aus. -
@oranggila Kann ich machen, aber eine Funktion, bei deren Aufruf auch Variablen übergeben werden müssen ist immer recht individuell. Die wird bei dir also so nur in Teilen funktionieren.
Was verhindert das schnelle selbst zusammen klicken so wie du es wirklich brauchst? -
@oranggila Kann ich machen, aber eine Funktion, bei deren Aufruf auch Variablen übergeben werden müssen ist immer recht individuell. Die wird bei dir also so nur in Teilen funktionieren.
Was verhindert das schnelle selbst zusammen klicken so wie du es wirklich brauchst? -
-
Du hattest dieses klasse Javascript erstellt, mit dem ich bei meinem gerootetem Robbi die Karte per Telegramm schicken lassen konnte.
createState('vis.RockroboMap', ''); var fs = require("fs"); const { createCanvas, Canvas } = require('canvas') const { Image } = require('canvas') const request = require('request'); const XMLHttpRequest = require("xmlhttprequest").XMLHttpRequest; //________________________________________________________________________________________________________________________________________________ // Farben änder const COLOR_FLOOR = "#23465e"; const COLOR_WALLS = "#2b2e30"; const COLOR_PATH = "white"; //________________________________________________________________________________________________________________________________________________ //Robot Image const rocky = "data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAACAAAAAfCAMAAAHGjw8oAAAAAXNSR0IArs4c6QAAAARnQU1BAACxjwv8YQUAAADbUExURQAAAICAgICAgICAgICAgICAgHx8fH19fX19fYCAgIGBgX5+foCAgH5+foCAgH9/f39/f35+foCAgH9/f39/f4CAgH5+foGBgYCAgICAgIGBgX9/f39/f35+foCAgH9/f39/f4CAgIODg4eHh4mJiZCQkJycnJ2dnZ6enqCgoKSkpKenp62trbGxsbKysry8vL29vcLCwsXFxcbGxsvLy87OztPT09XV1d/f3+Tk5Ojo6Ozs7O3t7e7u7vHx8fLy8vPz8/X19fb29vf39/j4+Pn5+f39/f7+/v///9yECocAAAAgdFJOUwAGChgcKCkzOT5PVWZnlJmfsLq7wcrS1Nre4OXz+vr7ZhJmqwAAAAlwSFlzAAAXEQAAFxEByibzPwAAAcpJREFUKFNlkolaWkEMhYPggliBFiwWhGOx3AqCsggI4lZt8/5P5ElmuEX5P5hMMjeZJBMRafCvUKnbIqpcioci96owTQWqP0QKC54nImUAyr9k7VD1me4YvibHlJKpVUzQhR+dmdTRSDUvdHh8NK8nhqUVch7cITmXA3rtYDmH+3OL4XI1T+BhJUcXczQxOBXJuve0/daeUr5A6g9muJzo5NI2kPKtyRSGBStKQZ5RC1hENWn6NSRTrDUqLD/lsNKoFTNRETlGMn9dDoGdoDcT1fHPi7EuUDD9dMBw4+6vMQVyInnPXDsdW+8tjWfbYTbzg/OstcagzSlb0+wL/6k+1KPhCrj6YFhzS5eXuHcYNF4bsGtDYhFLTOSMqTsx9e3iyKfynb1SK+RqtEq70RzZPwEGKwv7G0OK1QA42Y+HIgct9P3WWG9ItI/mQTgvoeuWAMdlTRclO/+Km2jwlhDvinGNbyJH6EWV84AJ1wl8JowejqTqTmv+0GqDmVLlg/wLX5Mp2rO3WRs2Zs5fznAVd1EzRh10OONr7hhhM4ctevhiVVxHdYsbq+JzHzaIfdjs5CZ9tGInSfoWEXuL7//fwtn9+Jp7wSryDjBFqnOGeuUxAAAAAElFTkSuQmCC"; const charger = "data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAABgAAAAYCAMAAADXqc3KAAAAdVBMVEUAAAA44Yo44Yo44Yo44Yo44Yo44Yo44Yo44Yp26q844Yr///9767Kv89DG9t2g8Md26q5C44/5/vvz/fjY+ei19NNV5ZtJ45T2/fmY78KP7r1v6atq6Kjs/PPi+u7e+uvM9+Gb8MSS7r+H7bhm6KVh56JZ5p3ZkKITAAAACnRSTlMABTr188xpJ4aepd0A4wAAANZJREFUKM9VklmCgzAMQwkQYCSmLKWl2+zL/Y9YcIUL7wvkJHIUJyKkVcyy+JIGCZILGF//QLEqlTmMdsBEXi56igfH/QVGqvXSu49+1KftCbn+dtxB5LOPfNGQNRaKaQNkTJ46OMGczZg8wJB/9TB+J3nFkyqJMp44vBrnWYhJJmOn/5uVzAotV/zACnbUtTbOpHcQzVx8kxw6mavdpYP90dsNcE5k6xd8RoIb2Xgk6xAbfm5C9NiHtxGiXD/U2P96UJunrS/LOeV2GG4wfBi241P5+NwBnAEUFx9FUdUAAAAASUVORK5CYII="; //last map let last_map; var canvasimg = new Canvas(); var ctximg = canvasimg.getContext('2d'); var res = {}; var img = new Image(); // Create a new Image img.src = rocky const img_charger = new Image(); img_charger.src = charger; const robotIp = "rockrobo"; // IP of the robot const robotState = "mihome-vacuum.0.info.state" // e.g : "mihome-vacuum.0.info.state" httpGetAsync("http://" + robotIp + "/api/map/latest", updateMapPage); // get actuel map data from Valetudo function httpGetAsync(theUrl, callback) { var xmlHttp = new XMLHttpRequest(); var jdata = {}; xmlHttp.onreadystatechange = function () { //console.log(JSON.stringify(xmlHttp)); if (xmlHttp.readyState == 4 && xmlHttp.status == 200) { try { jdata = JSON.parse(xmlHttp.responseText) //console.log(JSON.stringify(jdata)); } catch (err) {} callback(jdata); } } xmlHttp.open("GET", theUrl, true); // true for asynchronous xmlHttp.send(null); } function updateMapPage(res) { var canvas = createCanvas(); var ctx = canvas.getContext('2d'); let mapImageData; var map; canvas.height = 1024 * 4 //res.image.dimensions.height; canvas.width = 1024 * 4 //res.image.dimensions.width; // Male Boden if (res.image.pixels.floor && res.image.pixels.floor.length !== 0) { ctx.fillStyle = COLOR_FLOOR; res.image.pixels.floor.forEach(function (coord) { ctx.fillRect(coord[0] * 4 + res.image.position.left * 4, coord[1] * 4 + res.image.position.top * 4, 4, 4); }); } // Male Wände if (res.image.pixels.obstacle_strong && res.image.pixels.obstacle_strong.length !== 0) { ctx.fillStyle = COLOR_WALLS; res.image.pixels.obstacle_strong.forEach(function (coord) { ctx.fillRect(coord[0] * 4 + res.image.position.left * 4, coord[1] * 4 + res.image.position.top * 4, 4, 4); }); } // Male den Pfad if (res.path.points && res.path.points.length !== 0) { ctx.fillStyle = COLOR_PATH; let first = true; let cold1, cold2; res.path.points.forEach(function (coord) { if (first) { ctx.fillRect(coord[0] / 12.5, coord[1] / 50, 2, 2); cold1 = coord[0] / 12.5; cold2 = coord[1] / 12.5; } else { ctx.beginPath(); ctx.lineWidth = 1; ctx.strokeStyle = "#FFFFFF"; ctx.moveTo(cold1, cold2); ctx.lineTo(coord[0] / 12.5, coord[1] / 12.5); ctx.stroke(); cold1 = coord[0] / 12.5 cold2 = coord[1] / 12.5 } first = false }); } // Zeichne Roboter ctx.beginPath(); if (res.robot){ if (res.path.current_angle && typeof res.robot[0] !== "undefined" && typeof res.robot[1] !== "undefined") { canvasimg = rotateRobo(img, res.path.current_angle); ctx.drawImage(canvasimg, res.robot[0] / 12.5 - 15, res.robot[1] / 12.5 - 15, img.width, img.height); } else { ctx.drawImage(img, res.robot[0] / 12.5 - 15, res.robot[1] / 12.5 - 15, img.width, img.height); } } // Zeichne Ladestation wenn vorhanden if (res.charger){ if (typeof res.charger[0] !== "undefined" && typeof res.charger[1] !== "undefined") { ctx.beginPath(); ctx.drawImage(img_charger, res.charger[0] / 12.5 - 15, res.charger[1] / 12.5 - 15); } } // crop image let canvas_final = createCanvas(); let ctx_final = canvas_final.getContext('2d'); var trimmed = ctx.getImageData(res.image.position.left * 4, res.image.position.top * 4, res.image.dimensions.width * 4, res.image.dimensions.height * 4); canvas_final.height = res.image.dimensions.height * 4; canvas_final.width = res.image.dimensions.width * 4; ctx_final.putImageData(trimmed, 0, 0); map = canvas_final.toDataURL(); last_map= canvas_final; setState("javascript.0.vis.RockroboMap", '<img src="' + canvas_final.toDataURL() + '" /style="width: auto ;height: 100%;">'); //log('<img src="' + canvas_final.toDataURL() + '" />'); } function send(canvas){ var buf = canvas.toBuffer(); fs.writeFile("/opt/iobroker/vac_map.png", buf, (err) => { if (err) throw err; log('The file has been saved!'); }); setTimeout(function(){ // sendTo('telegram.0', '/opt/iobroker/vac_map.png'); sendTo('telegram.0', {text: '/opt/iobroker/vac_map.png', caption: 'Fertig mit saugen!'}); }, 3000); } function rotateRobo(img, angle) { var canvasimg = createCanvas(img.width, img.height); var ctximg = canvasimg.getContext('2d'); const offset = 90; ctximg.clearRect(0, 0, img.width, img.height); ctximg.translate(img.width / 2, img.width / 2); ctximg.rotate((angle + offset) * Math.PI / 180); ctximg.translate(-img.width / 2, -img.width / 2); ctximg.drawImage(img, 0, 0); return canvasimg; } schedule("*/2 * * * * *", function () { var robyState = getState(robotState).val; if (robyState === 5 || robyState === 11 || robyState === 17) httpGetAsync("http://" + robotIp + "/api/map/latest", updateMapPage); }); subscribe({ id: 'mihome-vacuum.0.info.state'/*Vacuum state*/, change: "ne" }, function (obj) { if(obj.newState.val === 8 && obj.oldState.val !== 8){ send(last_map); } });Nachdem Robbi das 4te Mal nun das rooting verloren hat, hab ich da keinen Bock mehr drauf. Der Adapter gibt die Karte ja jetzt auch aus der Cloud her.
Allerdings funktioniert das Script nicht mehr. Wie muss ich das abändern, damit die Karte wieder per Telegramm kommt?Robbi ist nicht mehr gerootet
ASROCK Deskmini Intel I3 8100 16GB mit Proxmox VM ioBroker VM DIYHue| CCU piVCCU + FHEM auf Raspberry | Maria DB mit Grafana und Prometheus auf Tinker Board
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden438
Online33.0k
Benutzer83.3k
Themen1.3m
Beiträge