

Adapter mihome-vacuum anpassungen
-
@xbow42 sagte in Adapter mihome-vacuum anpassungen:
@nathan1312 sagte in Adapter mihome-vacuum anpassungen:
... Oder hab ich einfach was über übersehen?
würde sagen ja. Wenn du eigene Komandos sendest kannst du die Anzahl(count) der Staugvorgänge mit senden.
Bsp: [X1, y1, x2, x2, count]
https://github.com/iobroker-community-adapters/ioBroker.mihome-vacuum/blob/master/README.md#commands-of-the-s50Ja, das weiß ich. Aber meine Frage bezog sich explizit auf die RAUMreinigung und nicht auf die KOORDINATENreinigung. Bei der RAUMreinigung habe ich diese Funktion noch nicht gefunden...
@nathan1312 anders wie bei der zonenreinigjng gibt es keinen Count Parameter. Das bedeutet, dass du die raumreinigung immer mehrfach anstoßen musst.
-
Mich würde mal interessieren warum man einen Raum zweimal hintereinander saugt.
..:: So long! Tom ::..
NUC7i3 (Ubuntu Proxmox VM) | Echo Dots 2+3. Gen | Xiaomi Sensoren | Mi Robot 1S | Yeelight | Sonoff | Shelly | H801 RGB | Gosund SP1 | NodeMCU+ESP32 | Kostal Plenticore PV+BYD | openWB
-
Weil, aus eigener Erfahrung, der Robbi nicht immer alles mitsaugt beim 1. Mal .
Synology DS218+ & 2 x Fujitsu Esprimo (VM/Container) + FritzBox7590 + 2 AVM 3000 Repeater & Homematic & HUE & Osram & Xiaomi, NPM 10.9.7, Nodejs 22.22.2 ,JS Controller 7.0.7 ,Admin 7.8.24
-
Weil, aus eigener Erfahrung, der Robbi nicht immer alles mitsaugt beim 1. Mal .
@haselchen Also Flächen ungesaugt bleiben oder die Saugkraft nicht reicht um alles was dennoch überfahren wird einzusammeln?
Mein 1S hat eine geniale Navigation, da bleibt kein Zentimeter ungesaugt. Und liegen geblieben ist auch noch nichts. Habe aber nur Laminat, kein Teppicht, was das etwas begünstigt.
Daher frage ich auch, weil den Bedarf nach Doppelrunde hatte ich noch nie. Mein Sauger fährt auch nur 1-2mal die Woche die ca. 80qm freie Bodenfläche. Bei manchen geschieht das ja täglich...:: So long! Tom ::..
NUC7i3 (Ubuntu Proxmox VM) | Echo Dots 2+3. Gen | Xiaomi Sensoren | Mi Robot 1S | Yeelight | Sonoff | Shelly | H801 RGB | Gosund SP1 | NodeMCU+ESP32 | Kostal Plenticore PV+BYD | openWB
-
@haselchen Also Flächen ungesaugt bleiben oder die Saugkraft nicht reicht um alles was dennoch überfahren wird einzusammeln?
Mein 1S hat eine geniale Navigation, da bleibt kein Zentimeter ungesaugt. Und liegen geblieben ist auch noch nichts. Habe aber nur Laminat, kein Teppicht, was das etwas begünstigt.
Daher frage ich auch, weil den Bedarf nach Doppelrunde hatte ich noch nie. Mein Sauger fährt auch nur 1-2mal die Woche die ca. 80qm freie Bodenfläche. Bei manchen geschieht das ja täglich.Hab den S50 2.Gen. und bei dem passiert es leider , dass Krümel oder dergleichen beim 1.Durchfahren liegenbleiben.
Aber finde ich halb so wild. Das Wohnzimmer (das betrifft es meistens) ist von ihm in ca.10min gesaugt.
Diese 10min mehr oder weniger stören echt nicht. -
Hab den S50 2.Gen. und bei dem passiert es leider , dass Krümel oder dergleichen beim 1.Durchfahren liegenbleiben.
Aber finde ich halb so wild. Das Wohnzimmer (das betrifft es meistens) ist von ihm in ca.10min gesaugt.
Diese 10min mehr oder weniger stören echt nicht.hallo,
ich bin thomas, 57 j. 'jung' und habe über das 'saugroboter-forum' zu euch gefunden.
seit 01.04.20 sind meine frau und ich im besitz eines Xiaomi S5 und ich hatte mich schon vorher viel eingelesen, sodass die wahl auf eine altern. firmware (valetudo re) fiel, da wir ein haus mit zwei etagen haben und die stock-firmware ja bekanntlich keine mehretagenkartenspeicherung kann.
nun zu meinem problem:
vorhanden sind der s5, ein raspberry pi 4 (4 gb) m. ubuntu 18.04.4 lts (64-bit) an board, 2x alexa dot 3. generation, iobroker und die 'hoffentlich' vollständigen adapter:
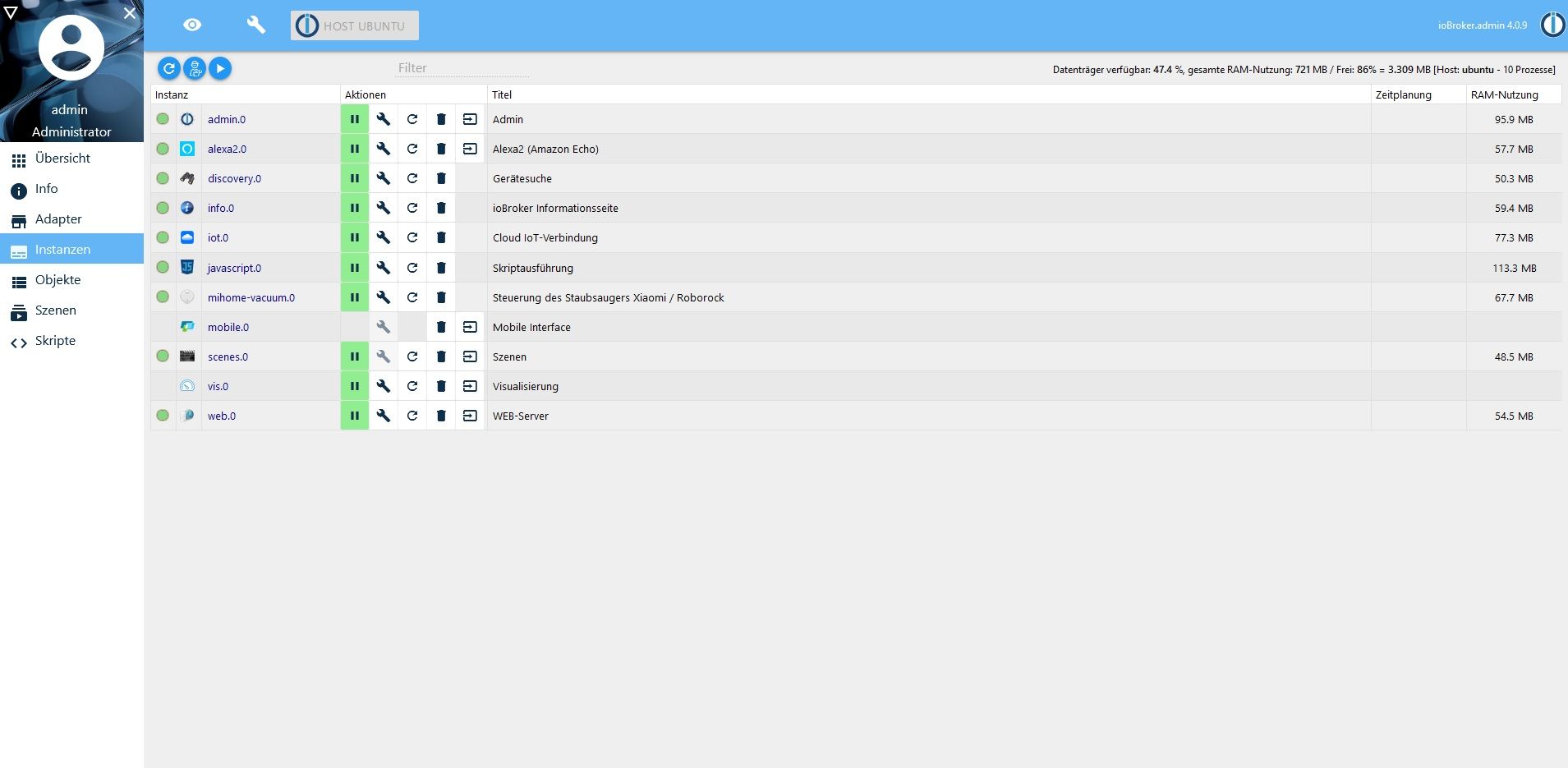
als mihome-adapter hab ich mir den neuesten aus dem git installiert.
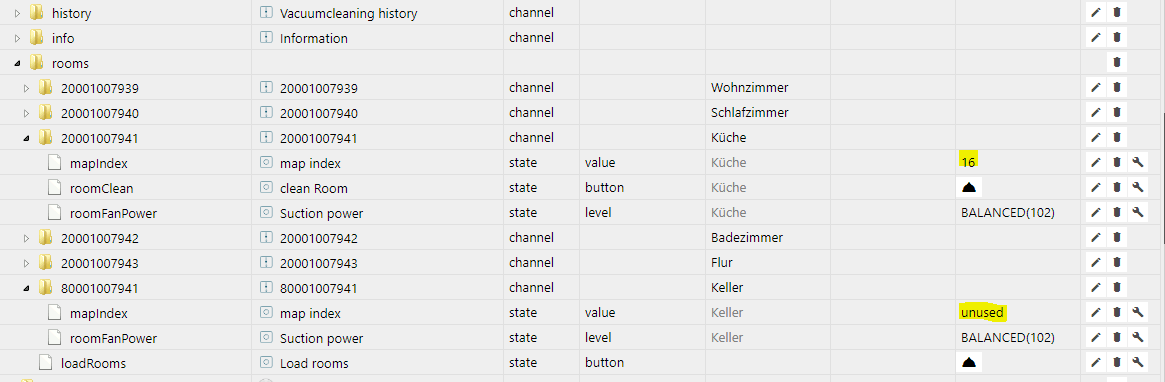
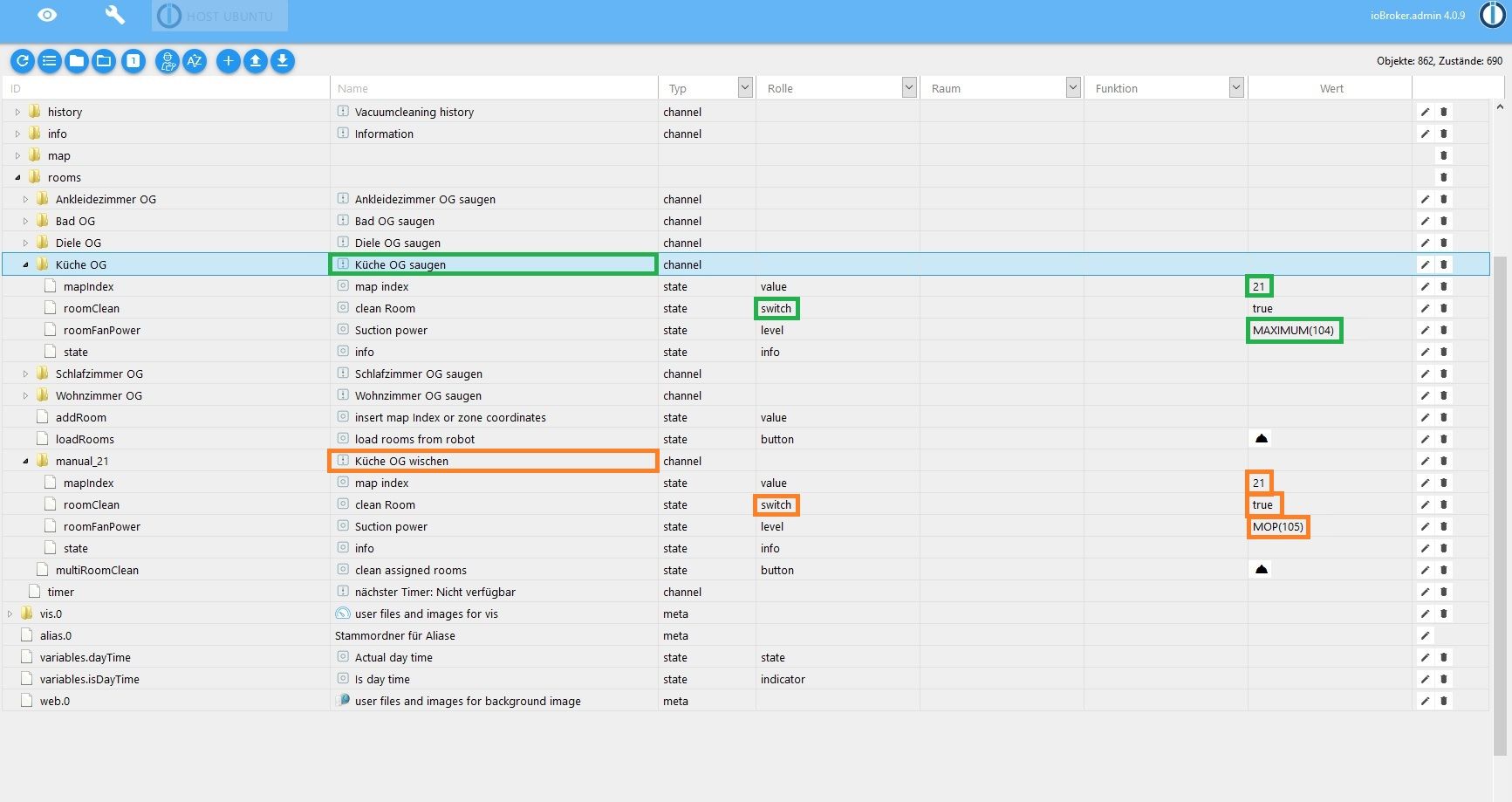
ich denke, es ist alles soweit aktuell und folgende objekte werden mir angezeigt:
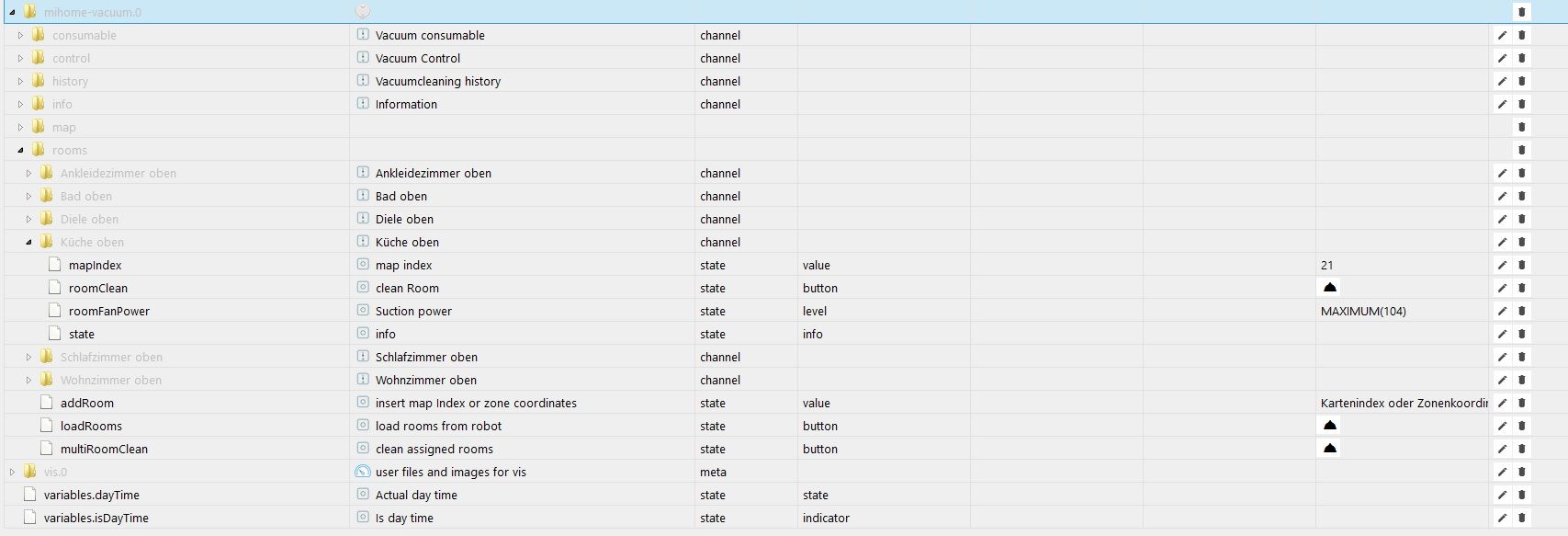
wie man sieht, werden alle von mir erstellten räume erkannt. sobald ich z.b. auf den button 'roomclean' der 'küche oben' klicken, wird auch nur die küche gesaugt.
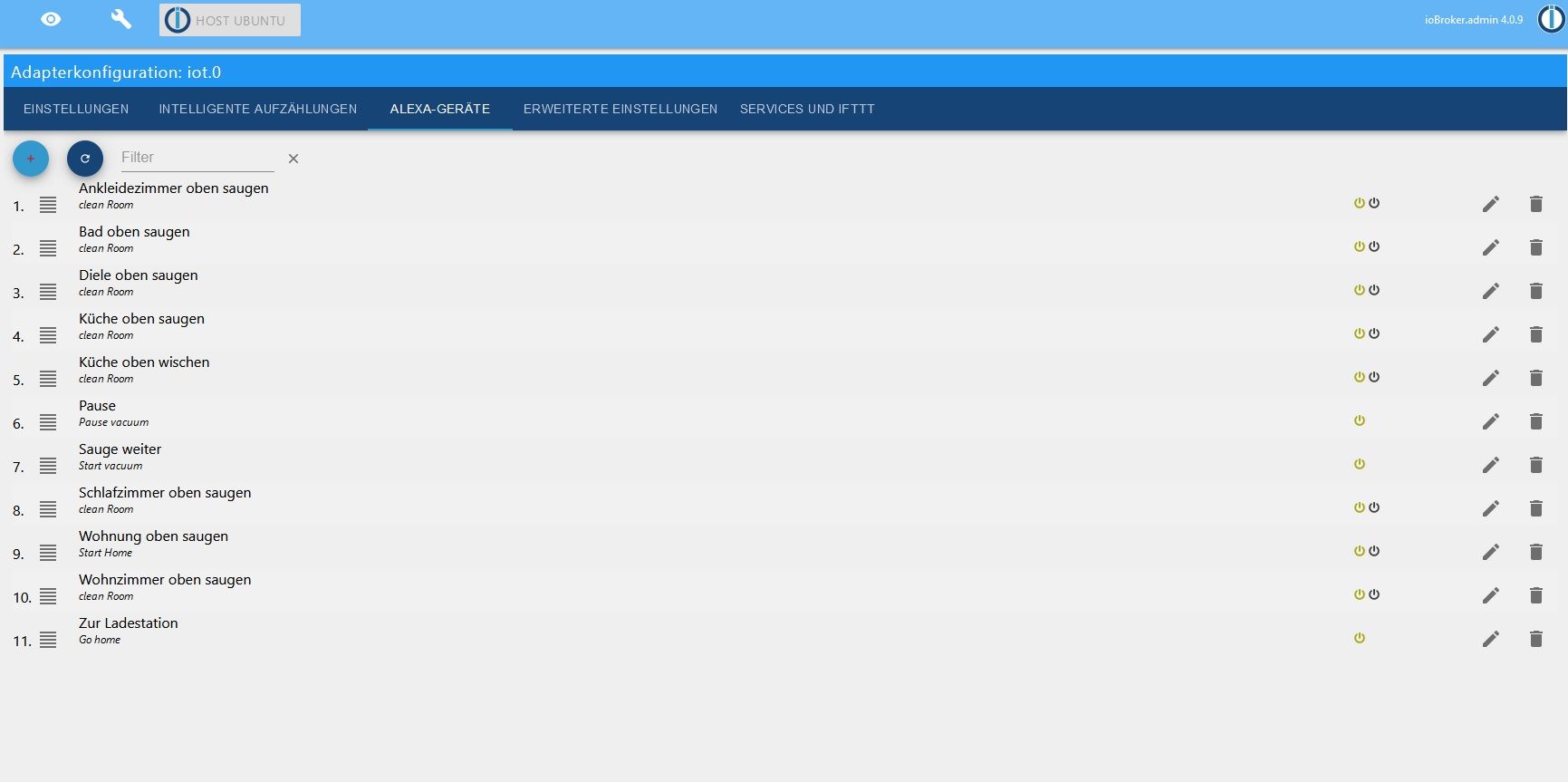
mein ziel ist es, das ganze auch über sprachkommandos an 'alexa' zu geben, was aber leider nicht funzt!
gehe ich auf die instanz 'iot.0' und will iobroker eine neue objekt-id geben, so wird diese nicht ünernommen und es kommt folgen fehlermeldung:
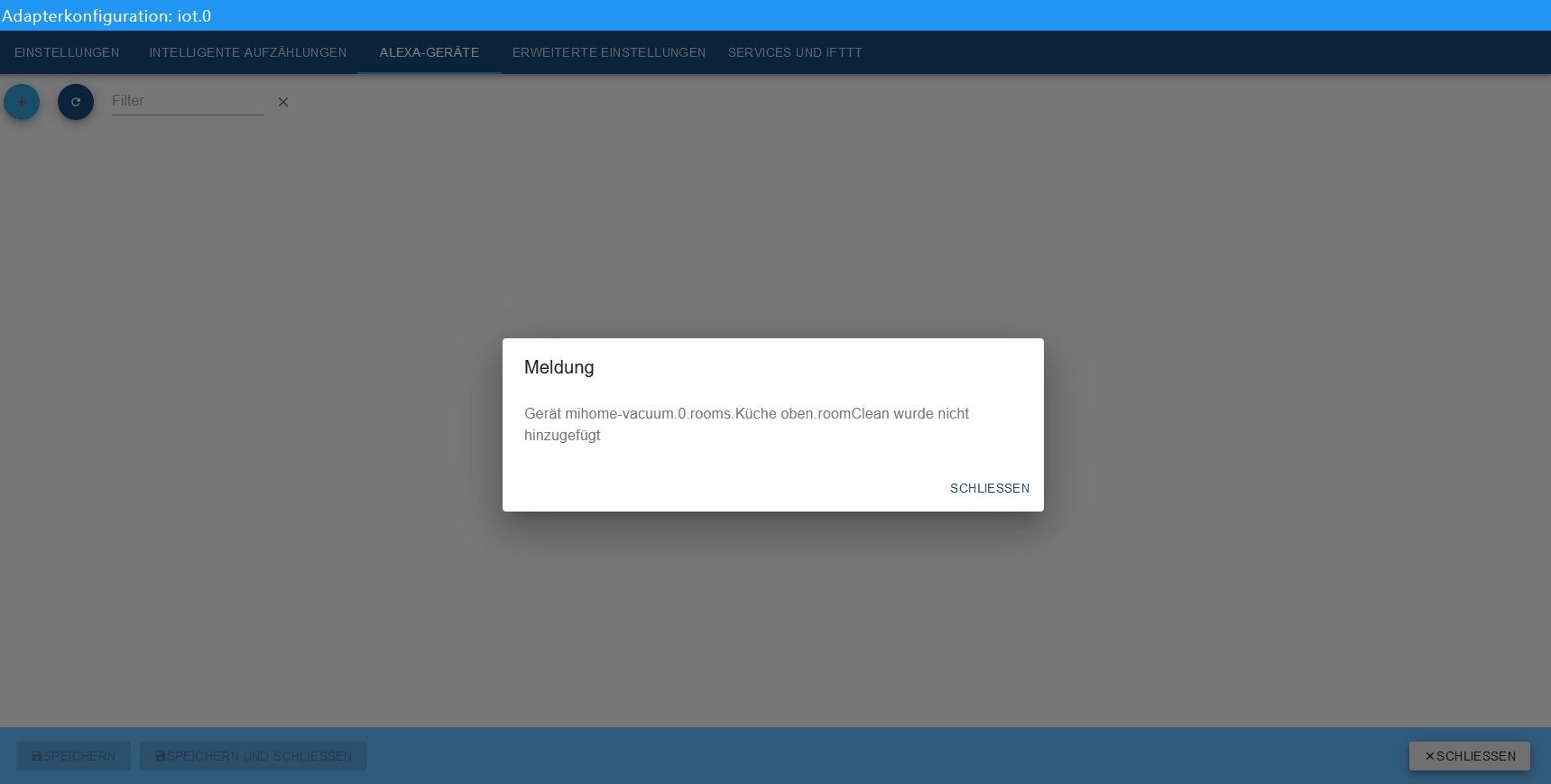
evtl. könnt ihr mir ein wenig auf die sprünge helfen, wo mein fehler liegt!?
danke im voraus und gruß,
tommi
-
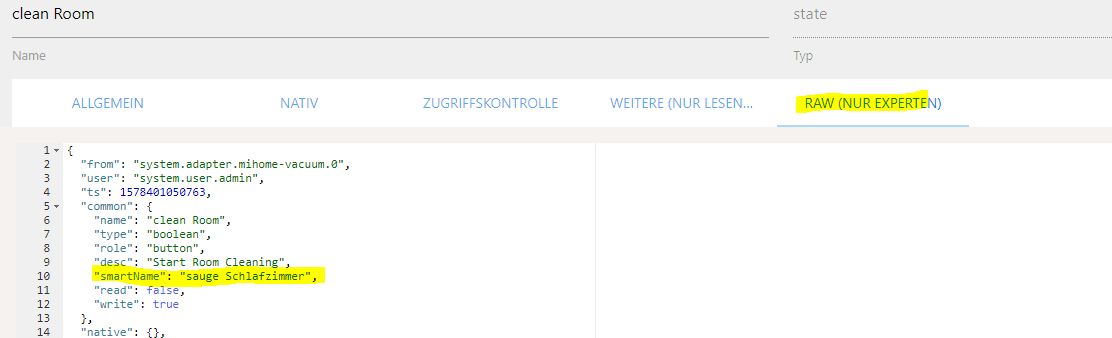
Definiere mal die ioBroker Räume an den datenpunkten. Ggf. Gehe mal auf den datenpunkt bearbeiten, dann RAW und dann unter Common den smartname hinzufügen, kann leider gerade kein Beispiel hinzufügen
-
Definiere mal die ioBroker Räume an den datenpunkten. Ggf. Gehe mal auf den datenpunkt bearbeiten, dann RAW und dann unter Common den smartname hinzufügen, kann leider gerade kein Beispiel hinzufügen
hi,
vielen lieben dank für deine antwort.
leider weiss ich nicht genau, wo ich das eintragen soll:
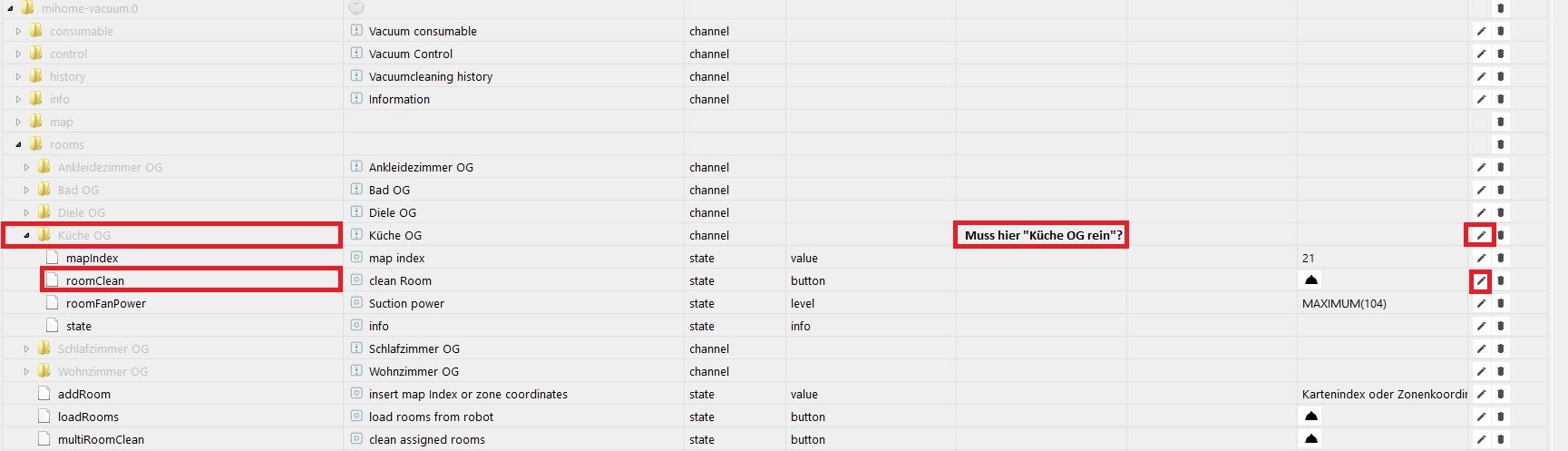
ist der datenpunkt der ordner 'Küche OG', oder die unterdatei 'roomClean'?
ich hatte es bei beiden probiert, jedoch erzielte das keine änderung.
als nächstes dann noch die frage, ob in der spalte 'Raum' der Raumname 'Küche OG' eingetragen werden muss?
wenn ja, ist mir das über den bleistift in der spalte zum editieren nicht möglich. es öffnet sich ein fenster 'aufzählungen für bearbeiten map index' und unten rechts sind zwei buttonfelder 'setzen' und 'schliessen', aber ich kann nirgends einen klick machen und etwas eintragen.
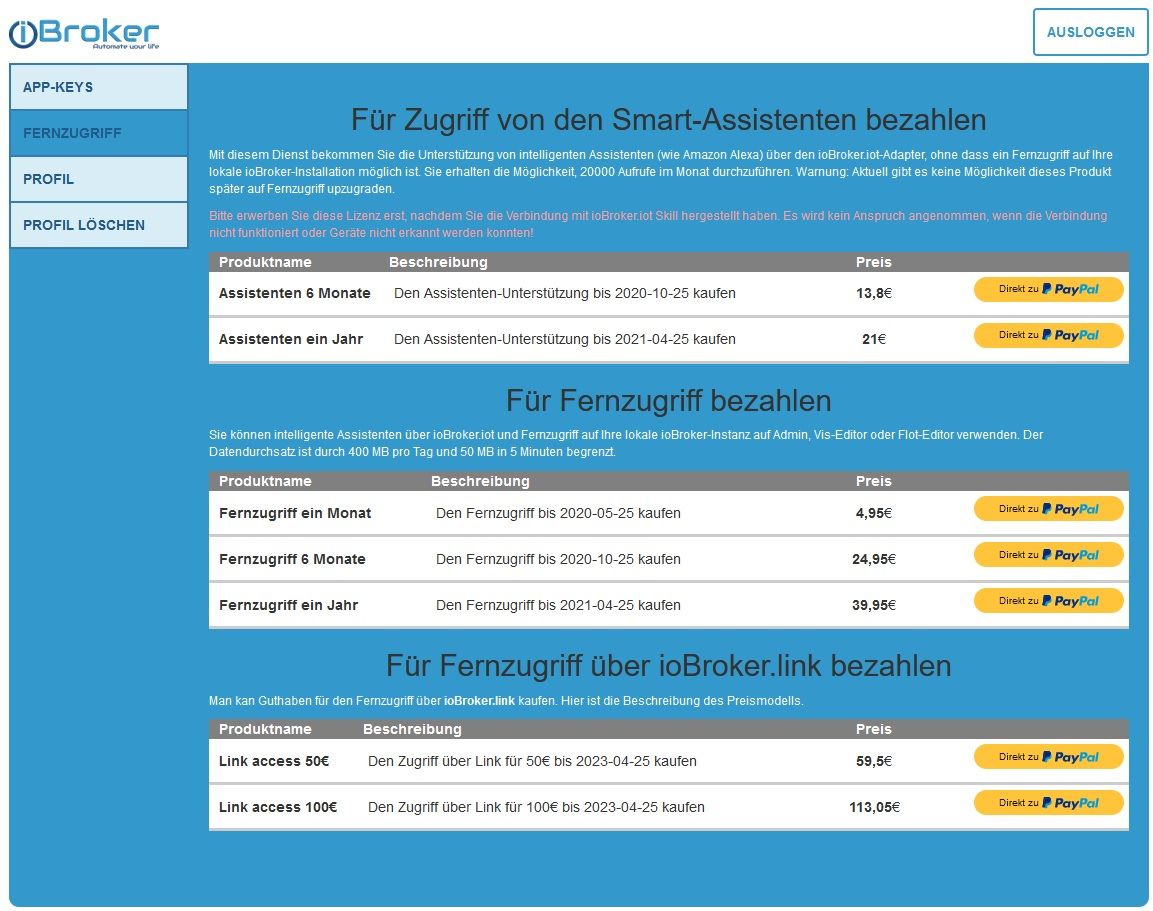
kann es sein, dass ich alles nicht ausführen kann, da ich 'nur' eine normale lizenz des iobroker.pro habe? wenn ja, was muss ich kaufen, um einfach nur wenige befehle absetzen zu können?
und als letztes die frage, ob beide echo-dots erkannt worden sind?
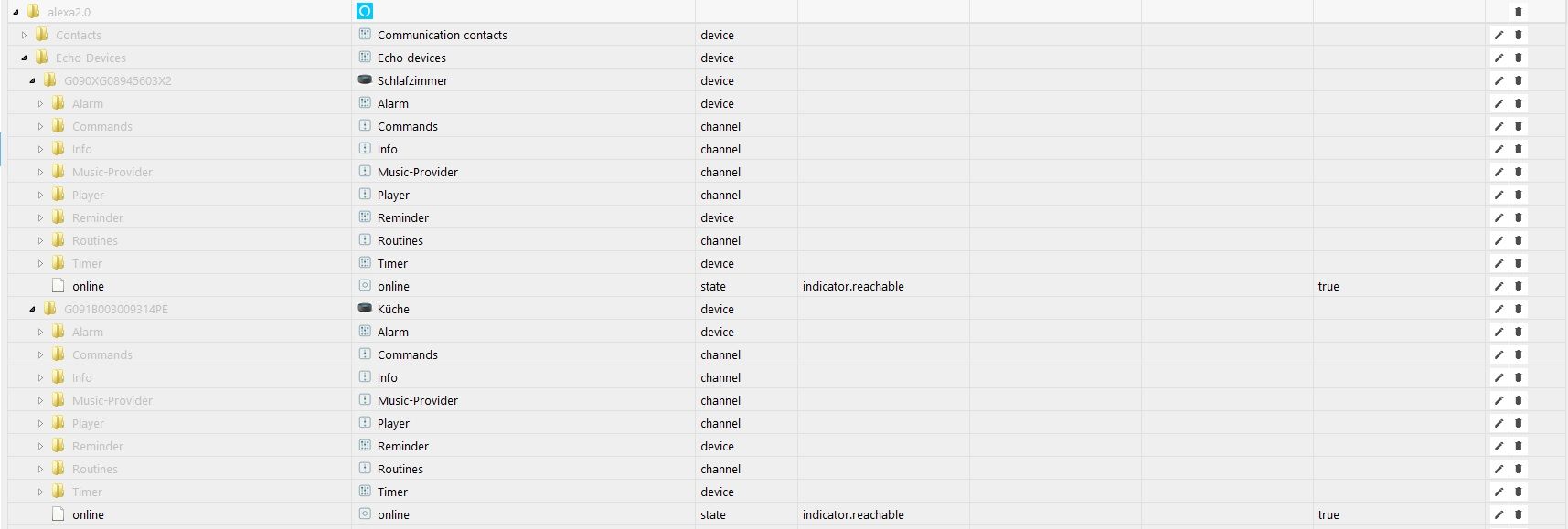
müsste doch aber so sein, da sie als 'online' gekennzeichnet sind, oder?
oh man, sorry für die vielen fragen und meine unwissenheit und danke im voraus für eine evtl. 'aufklärung'.
gruß,
tommi
-
hi,
vielen lieben dank für deine antwort.
leider weiss ich nicht genau, wo ich das eintragen soll:
ist der datenpunkt der ordner 'Küche OG', oder die unterdatei 'roomClean'?
ich hatte es bei beiden probiert, jedoch erzielte das keine änderung.
als nächstes dann noch die frage, ob in der spalte 'Raum' der Raumname 'Küche OG' eingetragen werden muss?
wenn ja, ist mir das über den bleistift in der spalte zum editieren nicht möglich. es öffnet sich ein fenster 'aufzählungen für bearbeiten map index' und unten rechts sind zwei buttonfelder 'setzen' und 'schliessen', aber ich kann nirgends einen klick machen und etwas eintragen.
kann es sein, dass ich alles nicht ausführen kann, da ich 'nur' eine normale lizenz des iobroker.pro habe? wenn ja, was muss ich kaufen, um einfach nur wenige befehle absetzen zu können?
und als letztes die frage, ob beide echo-dots erkannt worden sind?
müsste doch aber so sein, da sie als 'online' gekennzeichnet sind, oder?
oh man, sorry für die vielen fragen und meine unwissenheit und danke im voraus für eine evtl. 'aufklärung'.
gruß,
tommi
hi,
also, zu aller erst: ich habe es jetzt alles selbst hinbekommen!
ich weiss nicht, ob es nur so bei mir ist, jedenfalls war die 'lösung' recht simpel, nachdem ich mir mal die programmierung angeschaut habe:
als ich auf 'objekte' gegangen bin und mir die übernommenen 'rooms' angeschaut habe, ist mir erst nichts aufgefallen, bis mir der einfall kam, dass ein 'button' ja ein 'direkt auszuführender befehl' ist.
mit meinem laienhaften javascript-wissen wurde mir dann aber bewusst, dass ich per sprache ja kein button drücken, sondern einen schalter auslösen muss. also habe ich bei den datenpunkten 'roomClean' in den einzelnen räumen die rolle von 'button' auf 'switch' gestellt.
nun in die instanz 'iot.0' gegangen, das '+' gedrückt, den datenpunkt hinzugefügt und gespeichert und siehe da, keine fehlermeldung mehr, sondern brav den datenpunkt übernommen.
da die 'saugeinstellungen' ja in den objekten gemacht werden, habe ich mir am beispiel 'küche oben' diese nochmals manuell angelegt und ihr demenstprechend den 'wischmodus' und einen anderen namen vergeben. ebenso habe ich noch den 'wert' auf 'true' gesetzt. auch das funktioniert einwandfrei.
und so sieht das jetzt bei mir aus:
ob das alles einfacher geht, weiss ich nicht, aber es funzt! ;-)
danke nochmals an @dirkhe und gruß,
tommi
-
hi,
also, zu aller erst: ich habe es jetzt alles selbst hinbekommen!
ich weiss nicht, ob es nur so bei mir ist, jedenfalls war die 'lösung' recht simpel, nachdem ich mir mal die programmierung angeschaut habe:
als ich auf 'objekte' gegangen bin und mir die übernommenen 'rooms' angeschaut habe, ist mir erst nichts aufgefallen, bis mir der einfall kam, dass ein 'button' ja ein 'direkt auszuführender befehl' ist.
mit meinem laienhaften javascript-wissen wurde mir dann aber bewusst, dass ich per sprache ja kein button drücken, sondern einen schalter auslösen muss. also habe ich bei den datenpunkten 'roomClean' in den einzelnen räumen die rolle von 'button' auf 'switch' gestellt.
nun in die instanz 'iot.0' gegangen, das '+' gedrückt, den datenpunkt hinzugefügt und gespeichert und siehe da, keine fehlermeldung mehr, sondern brav den datenpunkt übernommen.
da die 'saugeinstellungen' ja in den objekten gemacht werden, habe ich mir am beispiel 'küche oben' diese nochmals manuell angelegt und ihr demenstprechend den 'wischmodus' und einen anderen namen vergeben. ebenso habe ich noch den 'wert' auf 'true' gesetzt. auch das funktioniert einwandfrei.
und so sieht das jetzt bei mir aus:
ob das alles einfacher geht, weiss ich nicht, aber es funzt! ;-)
danke nochmals an @dirkhe und gruß,
tommi
@thomas4golf Es ist aber kein switch, sundern ein button. Denn du drückst ja einmal und die Aktion geht los und es wird sofort wieder auf false gesetzt. Ein Switch wärees, wenn du etwas einschaltest und das solange eingeschaltet ist, bis du es wieder aus machst...
Den Raum trägt man hierein
 neben der MArkierung auf den Bleistift drücken. Wenn da keine Auswahl ist, muss du ganz links unter OBjekte im Punkt aufzählungen definieren.
neben der MArkierung auf den Bleistift drücken. Wenn da keine Auswahl ist, muss du ganz links unter OBjekte im Punkt aufzählungen definieren.
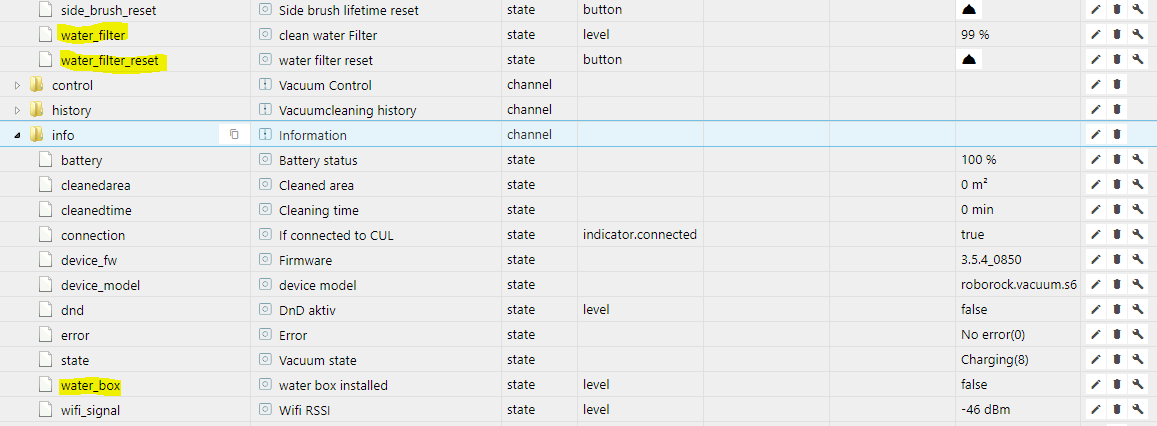
Manuell editieren oder hinzufügen kannst du den smartname, wenn du beieinem DP ganz rechts auf den Bleistift klickst und dann unter RAW:
-
@thomas4golf Es ist aber kein switch, sundern ein button. Denn du drückst ja einmal und die Aktion geht los und es wird sofort wieder auf false gesetzt. Ein Switch wärees, wenn du etwas einschaltest und das solange eingeschaltet ist, bis du es wieder aus machst...
Den Raum trägt man hierein
neben der MArkierung auf den Bleistift drücken. Wenn da keine Auswahl ist, muss du ganz links unter OBjekte im Punkt aufzählungen definieren.
Manuell editieren oder hinzufügen kannst du den smartname, wenn du beieinem DP ganz rechts auf den Bleistift klickst und dann unter RAW:
hey,
ich dödel! natürlich muss es ein button sein! wahrscheinlich wäre sonst der robbi nie zum saugende gekommen!
wollte zwar erst morgen früh das ganze in angriff nehmen, aber es hat mir keine ruhe gelassen.
ok, alles wieder zurück auf anfang, deinen anweisungen gefolgt und es läuft!
vielen lieben dank und noch ein schönes we,
tommi
-
Hallo,
weiß niemand was?
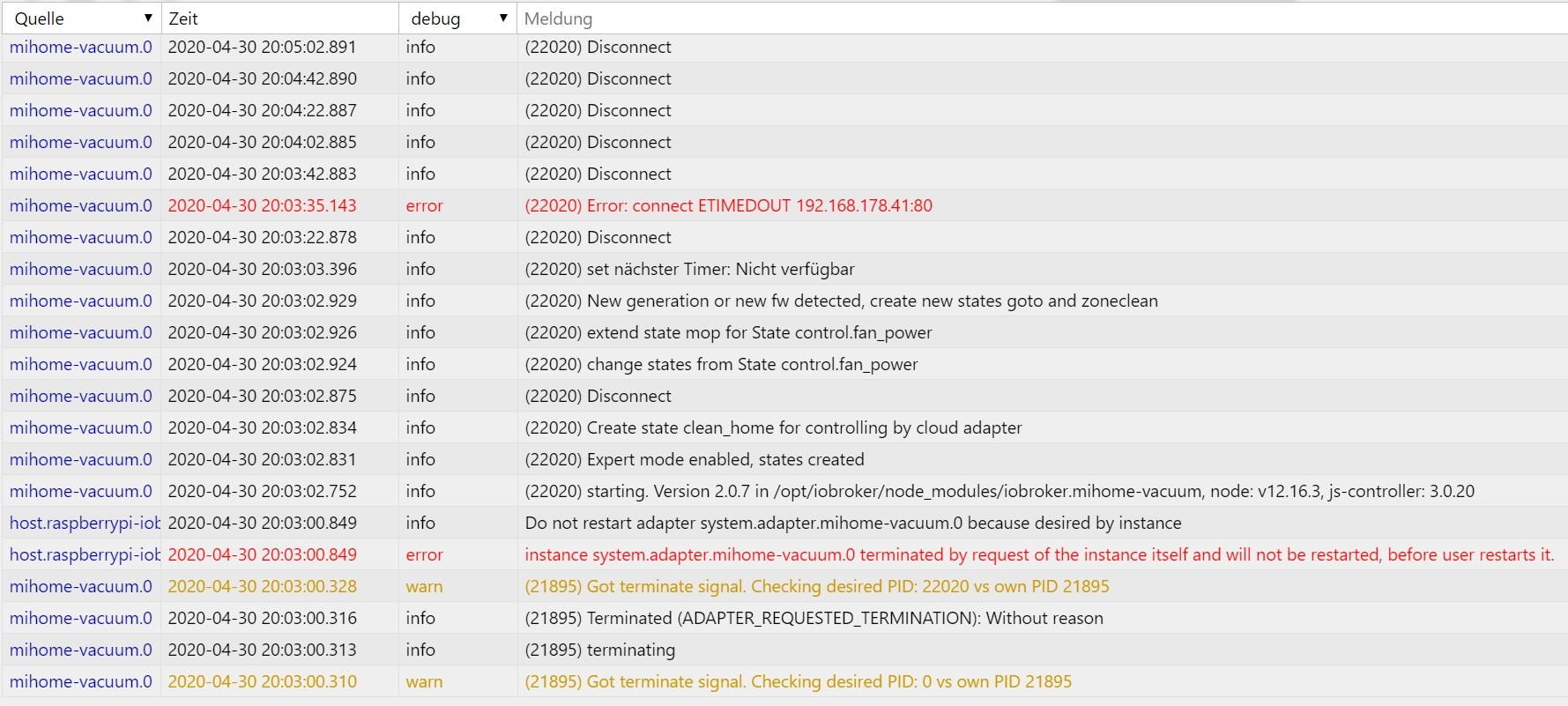
Ist halt immer wieder das gleiche, siehe Bild.
Adapter immer gelb, "Vebunden mit mihome-vacuum: falsch" die anderen beiden sind grün "wahr"
Muss den Roboter dann immer manuell neustarten...
Was ist da los bzw. was kann das sein und was kann ich da tun?
-
Hallo,
weiß niemand was?
Ist halt immer wieder das gleiche, siehe Bild.
Adapter immer gelb, "Vebunden mit mihome-vacuum: falsch" die anderen beiden sind grün "wahr"
Muss den Roboter dann immer manuell neustarten...
Was ist da los bzw. was kann das sein und was kann ich da tun?
@BlackRed
hi,
ich vermute, du hast entweder eine schlechte wlan-verbindung, oder im adapter sind deine zugangsdaten nicht korrekt, oder du hast einen falschen oder inkorrekten token eingetragen!
also: überprüfe in der fritzbox (im MESH) als erstes, wie stark deine verbindung zum robo ist. ist sie über 54mbits/s reicht das. dann schaue, ob du im connect zum mi-account die richtigen angaben gemacht hast (benutzername und passwort). danach stelle den richtigen server ein und klicke auf "get devices". jetzt sollte darunter dein robo erscheinen, sowohl welchen robo du hast, dahinter der token und dann deine ip. sollte das alles korrekt ausgelesen werden, kopiere den token darunter in die manuell settings. darunter wiederum deine ip-adresse. und jetzt habe ich etwas anders gemacht, als wie in den tutorials angegeben: wenn du nur einen robo hast trage in 'port des roboters: 54321' ein und auch in den eigenen port.
viel erfolg,
tommi
-
@BlackRed
hi,
ich vermute, du hast entweder eine schlechte wlan-verbindung, oder im adapter sind deine zugangsdaten nicht korrekt, oder du hast einen falschen oder inkorrekten token eingetragen!
also: überprüfe in der fritzbox (im MESH) als erstes, wie stark deine verbindung zum robo ist. ist sie über 54mbits/s reicht das. dann schaue, ob du im connect zum mi-account die richtigen angaben gemacht hast (benutzername und passwort). danach stelle den richtigen server ein und klicke auf "get devices". jetzt sollte darunter dein robo erscheinen, sowohl welchen robo du hast, dahinter der token und dann deine ip. sollte das alles korrekt ausgelesen werden, kopiere den token darunter in die manuell settings. darunter wiederum deine ip-adresse. und jetzt habe ich etwas anders gemacht, als wie in den tutorials angegeben: wenn du nur einen robo hast trage in 'port des roboters: 54321' ein und auch in den eigenen port.
viel erfolg,
tommi
@thomas4golf sagte in Adapter mihome-vacuum anpassungen:
@BlackRed
hi,
ich vermute, du hast entweder eine schlechte wlan-verbindung, oder im adapter sind deine zugangsdaten nicht korrekt, oder du hast einen falschen oder inkorrekten token eingetragen!
also: überprüfe in der fritzbox (im MESH) als erstes, wie stark deine verbindung zum robo ist. ist sie über 54mbits/s reicht das. dann schaue, ob du im connect zum mi-account die richtigen angaben gemacht hast (benutzername und passwort). danach stelle den richtigen server ein und klicke auf "get devices". jetzt sollte darunter dein robo erscheinen, sowohl welchen robo du hast, dahinter der token und dann deine ip. sollte das alles korrekt ausgelesen werden, kopiere den token darunter in die manuell settings. darunter wiederum deine ip-adresse. und jetzt habe ich etwas anders gemacht, als wie in den tutorials angegeben: wenn du nur einen robo hast trage in 'port des roboters: 54321' ein und auch in den eigenen port.
viel erfolg,
tommi
Hallo,
Danke. Ich habe auf dem Roborock Valetudo RE installiert, somit keine Zugangsdaten.
Token ist richtig.
Zum Roborock 2,4 GHz→72 Mbit/s
IP: 192.168.178.41 (ohne Probleme erreichbar übers Internet)
Eigener Port war 53421, habe ich geändert zu 54321.
Es hat sich aber nichts verändert...
-
@thomas4golf sagte in Adapter mihome-vacuum anpassungen:
@BlackRed
hi,
ich vermute, du hast entweder eine schlechte wlan-verbindung, oder im adapter sind deine zugangsdaten nicht korrekt, oder du hast einen falschen oder inkorrekten token eingetragen!
also: überprüfe in der fritzbox (im MESH) als erstes, wie stark deine verbindung zum robo ist. ist sie über 54mbits/s reicht das. dann schaue, ob du im connect zum mi-account die richtigen angaben gemacht hast (benutzername und passwort). danach stelle den richtigen server ein und klicke auf "get devices". jetzt sollte darunter dein robo erscheinen, sowohl welchen robo du hast, dahinter der token und dann deine ip. sollte das alles korrekt ausgelesen werden, kopiere den token darunter in die manuell settings. darunter wiederum deine ip-adresse. und jetzt habe ich etwas anders gemacht, als wie in den tutorials angegeben: wenn du nur einen robo hast trage in 'port des roboters: 54321' ein und auch in den eigenen port.
viel erfolg,
tommi
Hallo,
Danke. Ich habe auf dem Roborock Valetudo RE installiert, somit keine Zugangsdaten.
Token ist richtig.
Zum Roborock 2,4 GHz→72 Mbit/s
IP: 192.168.178.41 (ohne Probleme erreichbar übers Internet)
Eigener Port war 53421, habe ich geändert zu 54321.
Es hat sich aber nichts verändert...
moin,
@BlackRed sagte in Adapter mihome-vacuum anpassungen:
Ich habe auf dem Roborock Valetudo RE installiert, somit keine Zugangsdaten
und das ist dein problem! ;-)
du musst ein aktives konto auf der mi-seite haben, um eine verbindung erstmal herstellen zu können.
also, korrekte vorgehensweise wäre:
1.) roborock auf werkseinstellung setzen
2.) mihome-app öffnen und den roborock ordnungsgemäß ins netzwerk bringen
3.) token auslesen
4.) in der mihome-app abmelden (roborock aber nicht löschen, sondern drin lassen)
5.) valetudo re installieren und in den einstellungen bei wlan deine netzwerkverbindung zur fritzbox neu angeben (token geht nicht verloren)
6.) nun im iobroker, wie oben angegeben, vorgehenich habe selbstverständlich auch 'valetudo re 0.9.4' drauf, aber eben ein aktives konto! ;-)
versuchs mal, auch wenn es viel arbeit ist.
viel erfolg und gruß,
tommi
-
hey,
ich dödel! natürlich muss es ein button sein! wahrscheinlich wäre sonst der robbi nie zum saugende gekommen!
wollte zwar erst morgen früh das ganze in angriff nehmen, aber es hat mir keine ruhe gelassen.
ok, alles wieder zurück auf anfang, deinen anweisungen gefolgt und es läuft!
vielen lieben dank und noch ein schönes we,
tommi
@thomas4golf Ich habe nun bei meinen Räumen den zB
"smartname": "Roomcleaning Diehle",
hinzugefügt. Aber im iot Adapter und unter hinzufügen zu den Alexa Geräten funktioniert nicht bzw. taucht nicht auf. Hast du noch etwas anderes gemacht?BG Dark
-
Hallo,
habe auch seit paar Tagen den Xiaomi Mi Robot Vaccum-Mop P Model STYTJ02YM.
Ich habe den Token ausgelesen und alles nach Anleitung gemacht und sehe auch die Datenpunkte und das die Verbindung true ist.
Auch die FW wird angezeigt aber sonst geht nichts.Ich bekomme auch eine Meldung das anscheinend eine neue FW erkannt wird und ich das dem Entwickler melden soll.
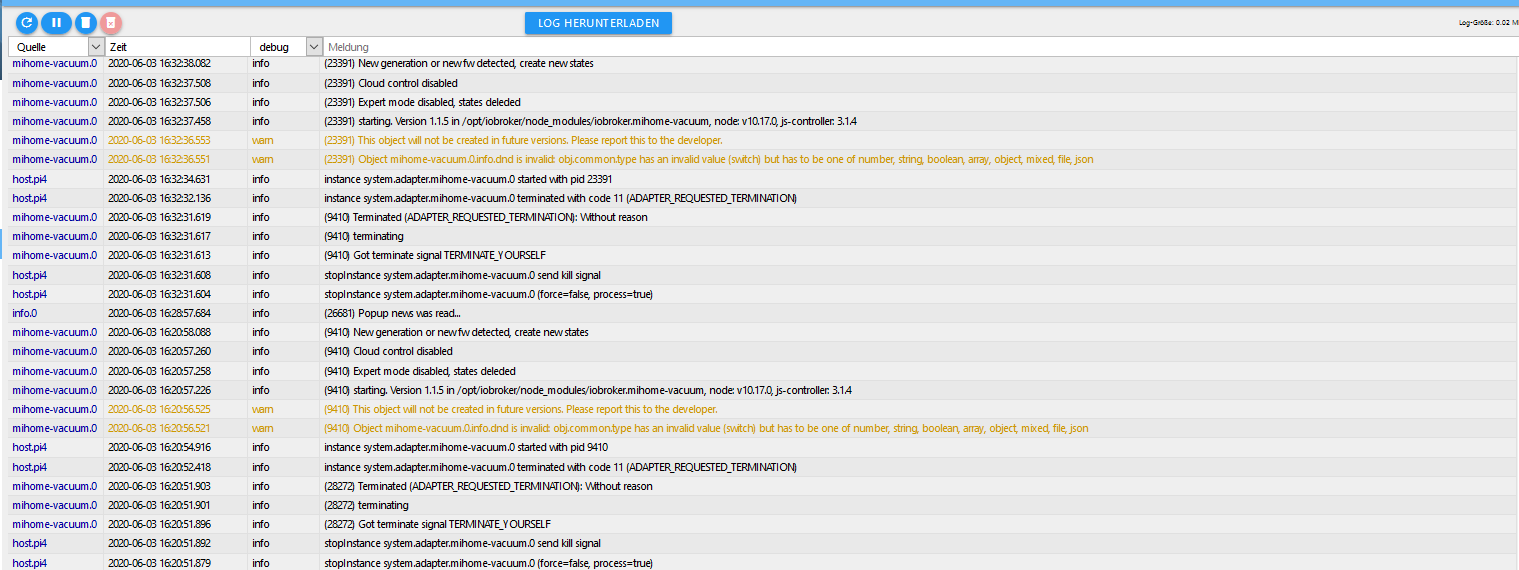

Sollte das bei GIT als neues Issue angelegt werden oder reicht es hier?
Danke euch schon mal für die Hilfe.
LG
Martin
-
Dann helf ich mal weil es hier anscheiend zu Irritationen führt bei Geräten wo in der Xiaomi Home App "noch" kein Raumname hinterlegt werden kann weil der Button fehlt - in meinem Fall Roborock S50.
Grundvorraussetzung ist natürlich die neuste Firmware über die VloleVac Android App.. das die Karte in der App nicht mehr funzt stört mich nicht, brauche das nur um auf die Firmware 3.5.7_002008 zu kommen ( Kann man in der Xiaomi App gegenprüfen: Einstellungen / Firmware aktualisieren )
Als erstes muss natürlich in der App die Zone bearbeitet werden und in Räume geteilt werden, jeder Raum hat am ende eine andere Farbe auf der Karte.. so weit so gut.
Nun wählen wir in IoBroker Objekte - mihome-vacuum.0 und klappen den Ordner Control auf. Für uns die nun Wichtige Zeile ist "X_Send_Command" inder spalte Wert Drücken wir auf das leere Feld und anschliessend auf den Stift.
Es Öffnet sich ein neues Fenster indem wir nur folgendes eintragen:app_segment_clean;[17]
unten bestätigen wir unsere Eingabe mit Setzen und der Sauger fährt los. Ich beobachte bei dieser Prozedur die Karte in der Xiaomi App um herauszufinden wo der Sauger hin möchte, der Raum wo der Sauger hin fährt bleibt bunt, alles andere wird auf der Karte ausgegraut. Die Zahl 17 ist zumindest bei mir schonmal ein Raum den der Sauger anfährt.Sollte er bei euch nicht los fahren, probiert ihr einfach andere Zahlen durch.. Ich habe bei 10 angefangen und bei 15 fuhr er das erste mal aus seiner Station.
Haben wir alle Räume über die Indexzahl ausfindig gemacht tragen wir sie nur noch im Ordner Rooms Zeile addRoom spalte Wert "Map Index" <- mit dem Stift bearbeiten und den Index den wir vorher gefunden haben als Zahl einfügen... nun entsteht ein neuer Ordner unter Rooms mit dem Namen der Indexzahl und darin befindlichen Datenpunkten für Saugstärke usw... Die prozedur mit add Room machen wr so lange bis alle Raumordner angelegt wurden.
@chillbreak Hallo!
Ich habe nun auch die Indexermittlung gemacht, habe aber auch den ganzen Channel rooms nicht ! Ich nutze die akt. Version 1.1.5. Ist bei der Installtion was schief gegangen? Kann man den Step nachträglich noc einmal laufn lassen?Gruss
Frank -
Hallo,
habe auch seit paar Tagen den Xiaomi Mi Robot Vaccum-Mop P Model STYTJ02YM.
Ich habe den Token ausgelesen und alles nach Anleitung gemacht und sehe auch die Datenpunkte und das die Verbindung true ist.
Auch die FW wird angezeigt aber sonst geht nichts.Ich bekomme auch eine Meldung das anscheinend eine neue FW erkannt wird und ich das dem Entwickler melden soll.
Sollte das bei GIT als neues Issue angelegt werden oder reicht es hier?
Danke euch schon mal für die Hilfe.
LG
Martin
@Matdos Du hast eine alte Version, das ist längst gefixt und auch nur eine Warnung
-
@chillbreak Hallo!
Ich habe nun auch die Indexermittlung gemacht, habe aber auch den ganzen Channel rooms nicht ! Ich nutze die akt. Version 1.1.5. Ist bei der Installtion was schief gegangen? Kann man den Step nachträglich noc einmal laufn lassen?Gruss
Frank@dpcFan Das ist noch nicht in der stable Version, wenn du das nutzten willst, musst du min. latest oder die git Version nehmen
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
243
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge