


Test DreameHome: 3D-Visualisierung und Alexa-Steuerung
-
Version 0.1.0
Release-Datum: 30.03.2025Neuigkeiten:
-
Erweiterte Flexibilität bei der Reinigungssteuerung:
Der Adapter ermöglicht es jetzt, für jedes Zimmer individuell festzulegen, ob der Dreame-Saugroboter nur saugt, wischt oder eine Kombination aus beiden ausführt. Dies geht über die standardmäßigen Einschränkungen des Dreame-Roboters hinaus, der normalerweise nur einen Reinigungsmodus für alle Räume akzeptiert. -
Unterstützung für alternative Zimmer- und Reinigungsbezeichner:
Die Zimmernamen und Reinigungsarten sind jetzt flexibler. Begriffe wie "Wohnzimmer wischen nass" oder "Stube wischen intensiv" werden automatisch als gleichwertig behandelt, sodass du verschiedene Begriffe verwenden kannst, um den gleichen Reinigungsmodus zu aktivieren. -
Automatische Zuordnung von Räumen und Befehlen:
Der Adapter übersetzt alternative Bezeichner für Räume (z. B. "Wohnzimmer", "Stube", "salon") in die akzeptierten Standardbezeichner, was eine nahtlose und benutzerfreundliche Steuerung ermöglicht. Ebenso werden verschiedene Formulierungen für das Saugen oder Wischen (z. B. "staubsaugen" oder "sweeping") korrekt erkannt und dem richtigen Reinigungsmodus zugeordnet.
Beispiele für neue Befehle:
- "Wohnzimmer wischen Nass" = "Stube wischen Intensiv"
- "Schlafzimmer staubsaugen Kraftvoll" = "Hauptschlafzimmer saugen Intensiv" = "masterzimmer saugen Stark"
- "Küche saugen und wischen Nass und Ultra" = "Kochnische saugen und wischen Durchnässt und Voll"
Verbesserungen:
-
Vermeidung von doppelten oder widersprüchlichen Befehlen:
Das System prüft automatisch, ob für ein und dasselbe Zimmer widersprüchliche Reinigungsmodi oder wiederholte Befehle innerhalb eines kurzen Zeitraums gesendet wurden, um unerwünschte Doppelaktionen zu vermeiden. -
Bessere Steuerung bei aktiven Reinigungsprozessen:
Sollte ein Reinigungsprozess bereits laufen, erkennt der Adapter dies und fragt den Benutzer, ob der laufende Prozess gestoppt und ein neuer gestartet werden soll. Dies sorgt für eine flüssige Benutzererfahrung und verhindert gleichzeitige Reinigungsvorgänge.
Szenario 1: Mehrere Räume mit gemischten Modi und Wiederholungen
-
Befehl: „Wohnzimmer saugen hoch und Küche saugen mittel und Küche wischen niedrig 2 mal“
-
Erklärung:
- „Wohnzimmer saugen hoch“: Der Roboter startet im Wohnzimmer mit dem Saugmodus auf hoher Stufe.
- „Küche saugen mittel“: In der Küche wird der Saugmodus auf mittlerer Stufe eingestellt.
- „Küche wischen niedrig 2 mal“: In der Küche wird der Wischmodus auf niedriger Stufe eingestellt, und der Wischvorgang wird zweimal wiederholt.
Aktion: Der Roboter wird zuerst das Wohnzimmer reinigen (Saugen hoch), dann die Küche (Saugen mittel), und danach den Wischmodus auf niedrig in der Küche zweimal ausführen.
Szenario 2: Zwei Räume mit einem Modus (nur Saugen oder Wischen)
-
Befehl: „Flur saugen hoch und Bad wischen intensiv“
-
Erklärung:
- „Flur saugen hoch“: Der Roboter wird im Flur mit dem höchsten Saugmodus arbeiten.
- „Bad wischen intensiv“: Das Bad wird mit dem höchsten Wischmodus (Intensiv) gewischt.
Aktion: Der Roboter startet mit dem Saugen im Flur auf hoher Stufe und geht danach ins Bad, um dort intensiv zu wischen.
Szenario 3: Benutzerabbruch bei fehlenden Modi
-
Befehl: „Wohnzimmer saugen und Küche wischen“
-
Erklärung:
- Der Befehl fehlt für das „Saugen“ im Küchenbereich, was eine unvollständige Anweisung darstellt.
Aktion: Da in der Küche der Saugmodus nicht angegeben wurde und eine Lücke im Befehl erkannt wird, fordert Alexa den Benutzer auf, den fehlenden Modus zu korrigieren.
Antwort von Alexa: „Für folgende Räume fehlen Angaben: Wohnzimmer: Sauglevel und Küche: Wischlevel. Bitte definiere die fehlenden Werte.“
Szenario 4: Unterschiedliche Reinigungsmodi mit Raum- und Modus-Synonymen
-
Befehl: „Stube saugen intensiv und Küche wischen nach saugen niedrig und kraftvoll und Bad wischen intensiv“
-
Erklärung:
- Der Benutzer verwendet das Synonym „Stube“ anstelle von „Wohnzimmer“. Da Dreamehome diese Flexibilität unterstützt, wird „Stube“ als „Wohnzimmer“ erkannt und der Modus „Saugen intensiv“ wird zugeordnet.
- Die Küche wird mit „Saugen niedrig danach Wischen stark“ und das Bad mit „Wischen intensiv“ gereinigt.
Aktion: Der Roboter wird die folgenden Schritte ausführen:
- Stube (Wohnzimmer) saugen intensiv
- Küche wischen niedrig nach saugen stark
- Bad wischen intensiv
Szenario 5: Wiederholte Reinigung eines Raumes
-
Befehl: „Wohnzimmer saugen hoch 3 mal und Bad wischen intensiv 2 mal“
-
Erklärung:
- Der Roboter soll das Wohnzimmer dreimal mit dem Saugmodus „hoch“ und das Bad zweimal mit dem Wischmodus „intensiv“ reinigen.
Aktion: Der Roboter startet die Reinigung im Wohnzimmer mit hohem Saugmodus und wiederholt den Vorgang dreimal. Danach geht er ins Bad, um zweimal mit dem intensiven Wischmodus zu reinigen.
Szenario 6: Beenden der Reinigung, wenn ein Abbruchbefehl gegeben wird
-
Befehl: „"reinigung abbrechen", "reinigung stoppen", "stop reinigung", "roboter aus", "reinigung bitte abbrechen", "reinigung beenden", "reinigung unterbrechen", "reinigung anhalten", "saugvorgang stoppen", "staubsauger aus", "roboter abschalten", "staubsaugen beenden", "putzen stoppen", "staubsaugen stoppen", "staubsaugen deaktivieren", "bodenreinigung stoppen", "staubsauger ausschalten", "sauger aus", "roboter deaktivieren", "dreame stoppen", "dreame aus", "dreame reinigen beenden"“
-
Erklärung:
- Ein Benutzer kann jederzeit den Befehl „Stopp Reinigung“ geben, um den laufenden Vorgang zu beenden.
Aktion: Wenn der Befehl zum Stoppen der Reinigung kommt, wird der Roboter sofort gestoppt und zur Ladestation zurückgeschickt. Falls der Roboter gerade aktiv reinigt, wird der Vorgang abgebrochen.
Antwort von Alexa: „Die Reinigung wurde gestoppt und der Roboter fährt zur Ladestation.“
DANKE dass du an einem Adapter für ioBroker arbeitest.
Bitte ergänze deinen Adapter um die standardmäßig vom adapter creator auch angelegten Github based tests aus. Minimales Testing sollten auch Dapetr haben die (zunächst) nur via Github zum Testen angeboten werden.
Beim ersten Blick in dein repo fällt auf:
- github based tests (workflow test-and-release) fehlt
- README Changelog bitte in die übliche Form bringen (schau bei anderen Adaptern rein) damit das Release Scritp dir die Arbeit des erstellens einer sauberen Release abnehmen kann
Wenn der Adapter für User testbar / verwendbar ist, veranlass dann bitte ein Review und eine Aufnehme in die Repositories.
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
-
DANKE dass du an einem Adapter für ioBroker arbeitest.
Bitte ergänze deinen Adapter um die standardmäßig vom adapter creator auch angelegten Github based tests aus. Minimales Testing sollten auch Dapetr haben die (zunächst) nur via Github zum Testen angeboten werden.
Beim ersten Blick in dein repo fällt auf:
- github based tests (workflow test-and-release) fehlt
- README Changelog bitte in die übliche Form bringen (schau bei anderen Adaptern rein) damit das Release Scritp dir die Arbeit des erstellens einer sauberen Release abnehmen kann
Wenn der Adapter für User testbar / verwendbar ist, veranlass dann bitte ein Review und eine Aufnehme in die Repositories.
Update 0.1.2 (06.04.2025)
Neue Funktionen und Verbesserungen:
-
Komponentensteuerung und Statusmeldungen:
-Unterstützung für die Steuerung und Statusprüfung der folgenden Komponenten hinzugefügt:- Hauptbürste, Seitenbürste, Filter, Wischbezug, Silberionen, Reinigungsmittel, Reinwassertank, Schmutzwassertank
-
Rücksetzen einzelner oder aller Komponenten möglich.
-
Statusberichte für Komponenten wie verbleibende Zeit (z. B. verbleibende Wischpad-Zeit, verbleibende Hauptbürsten-Zeit)
-
Flexible Befehlserkennung:
-
Befehle wie Entleeren (Leeren, Automatisches Entleeren, Behälter reinigen usw.) und Wischmoppreinigung (Waschen, Automatisches Waschen, Wischmopp reinigen usw.) werden jetzt erkannt und lösen die entsprechenden Aktionen aus.
-
Unterstützung für das Zurücksetzen einzelner oder aller Komponenten mit Befehlen wie „Hauptbürste zurücksetzen“, „Alle zurücksetzen“ usw.
-
Komponentenspezifische Statusabfragen über flexible Synonyme wie „Hauptbürstenstatus prüfen“ oder „Wischpad prüfen“.
-
-
Verbesserte Befehlsflexibilität:
-
Dynamische Befehlsanalyse: Der Befehlsparser erkennt jetzt verschiedene Synonyme für Roboterbefehle (Roboter, Staubsauger, Dreame usw.), Entleeren (Leeren, automatisches Entleeren usw.), Waschen (Waschen, Wischmoppreinigung usw.) und Zurücksetzen von Komponenten (Hauptbürste zurücksetzen, Alles zurücksetzen usw.).
-
Sprachspezifische Synonyme: Befehle werden dynamisch basierend auf der Sprache (EN/DE) zugeordnet, wodurch eine präzise Erkennung unabhängig von der Formulierung gewährleistet wird.
-
🇺🇸 Example Scenarios (Voice Commands)
To make your voice command work, always say a word like 'robot', 'dreame', 'vacuum', 'vacuum cleaner'
Scenario 1: General Status Check
"Alexa, check robot status."
📌 The system will provide a complete status report of your Dreame robot, including:
- Battery level
- Current room (if cleaning)
- Status and remaining life of components like the mop pad, main brush, side brush, filter, water tanks, detergent, silver ion unit, and sensors
Scenario 2: Clean the Mop
"Alexa, clean the mop."
📌 The robot will return to the station and start the mop cleaning process. This ensures that the mop pad is rinsed and ready for further cleaning.
Scenario 3: Reset a Single Component
"Alexa, reset filter."
📌 The system detects that you're referring to the filter and resets its usage timer. This is useful after you've cleaned or replaced it.
Scenario 4: Empty the Dustbin
"Alexa, empty the dustbin."
📌 The robot will go to the station and start the auto-empty process, removing dust and debris from the bin automatically.
Scenario 5: Reset All Components
"Alexa, reset all components."
📌 This command will reset the usage time of all components (brushes, filter, mop pad, detergent, silver ion, sensors, etc.) at once נperfect after a full service or replacement.
🇩🇪 Beispiel-Szenarien (Sprachbefehle)
Damit dein Sprachbefehl funktioniert, sag immer ein Wort wie 'roboter', 'dreame', 'staubsauger', 'saugroboter'
Szenario 1: Allgemeiner Statusbericht
„Alexa, Roboterstatus prüfen.“
📌 Das System gibt einen vollständigen Statusbericht deines Dreame Saugroboters aus, inklusive:
- Batteriestand
- Aktueller Raum (falls Reinigung läuft)
- Zustand und verbleibende Lebensdauer aller Komponenten wie Mopp-Pad, Hauptbürste, Seitenbürste, Filter, Wassertanks, Reinigungsmittel, Silberioneneinheit und Sensoren
Szenario 2: Mopp reinigen
„Alexa, Roboter Mopp reinigen.“
📌 Der Roboter kehrt zur Station zurück und startet die Mopp-Reinigung. Das Mopp-Pad wird dabei gespült und für die nächste Reinigung vorbereitet.
Szenario 3: Einzelne Komponente zurücksetzen
„Alexa, Roboter Filter zurücksetzen.“
📌 Das System erkennt, dass du den Filter meinst, und setzt die Nutzungsanzeige zurück – ideal nach einer Reinigung oder einem Austausch.
Szenario 4: Staubbehälter entleeren
„Alexa, Roboter Staubbehälter leeren.“
📌 Der Roboter fährt zur Station und startet den Auto-Entleerungsvorgang. Der Staubbehälter wird automatisch geleert.
Szenario 5: Alle Komponenten zurücksetzen
„Alexa, Roboter alle komponenten zurücksetzen.“
📌 Mit diesem Befehl setzt das System die Nutzungszeit aller Komponenten (Bürsten, Filter, Mopp-Pad, Reinigungsmittel, Silberionen, Sensoren usw.) gleichzeitig zurück – ideal nach einer Wartung oder einem Kompletttausch.
-
Update 0.1.2 (06.04.2025)
Neue Funktionen und Verbesserungen:
-
Komponentensteuerung und Statusmeldungen:
-Unterstützung für die Steuerung und Statusprüfung der folgenden Komponenten hinzugefügt:- Hauptbürste, Seitenbürste, Filter, Wischbezug, Silberionen, Reinigungsmittel, Reinwassertank, Schmutzwassertank
-
Rücksetzen einzelner oder aller Komponenten möglich.
-
Statusberichte für Komponenten wie verbleibende Zeit (z. B. verbleibende Wischpad-Zeit, verbleibende Hauptbürsten-Zeit)
-
Flexible Befehlserkennung:
-
Befehle wie Entleeren (Leeren, Automatisches Entleeren, Behälter reinigen usw.) und Wischmoppreinigung (Waschen, Automatisches Waschen, Wischmopp reinigen usw.) werden jetzt erkannt und lösen die entsprechenden Aktionen aus.
-
Unterstützung für das Zurücksetzen einzelner oder aller Komponenten mit Befehlen wie „Hauptbürste zurücksetzen“, „Alle zurücksetzen“ usw.
-
Komponentenspezifische Statusabfragen über flexible Synonyme wie „Hauptbürstenstatus prüfen“ oder „Wischpad prüfen“.
-
-
Verbesserte Befehlsflexibilität:
-
Dynamische Befehlsanalyse: Der Befehlsparser erkennt jetzt verschiedene Synonyme für Roboterbefehle (Roboter, Staubsauger, Dreame usw.), Entleeren (Leeren, automatisches Entleeren usw.), Waschen (Waschen, Wischmoppreinigung usw.) und Zurücksetzen von Komponenten (Hauptbürste zurücksetzen, Alles zurücksetzen usw.).
-
Sprachspezifische Synonyme: Befehle werden dynamisch basierend auf der Sprache (EN/DE) zugeordnet, wodurch eine präzise Erkennung unabhängig von der Formulierung gewährleistet wird.
-
🇺🇸 Example Scenarios (Voice Commands)
To make your voice command work, always say a word like 'robot', 'dreame', 'vacuum', 'vacuum cleaner'
Scenario 1: General Status Check
"Alexa, check robot status."
📌 The system will provide a complete status report of your Dreame robot, including:
- Battery level
- Current room (if cleaning)
- Status and remaining life of components like the mop pad, main brush, side brush, filter, water tanks, detergent, silver ion unit, and sensors
Scenario 2: Clean the Mop
"Alexa, clean the mop."
📌 The robot will return to the station and start the mop cleaning process. This ensures that the mop pad is rinsed and ready for further cleaning.
Scenario 3: Reset a Single Component
"Alexa, reset filter."
📌 The system detects that you're referring to the filter and resets its usage timer. This is useful after you've cleaned or replaced it.
Scenario 4: Empty the Dustbin
"Alexa, empty the dustbin."
📌 The robot will go to the station and start the auto-empty process, removing dust and debris from the bin automatically.
Scenario 5: Reset All Components
"Alexa, reset all components."
📌 This command will reset the usage time of all components (brushes, filter, mop pad, detergent, silver ion, sensors, etc.) at once נperfect after a full service or replacement.
🇩🇪 Beispiel-Szenarien (Sprachbefehle)
Damit dein Sprachbefehl funktioniert, sag immer ein Wort wie 'roboter', 'dreame', 'staubsauger', 'saugroboter'
Szenario 1: Allgemeiner Statusbericht
„Alexa, Roboterstatus prüfen.“
📌 Das System gibt einen vollständigen Statusbericht deines Dreame Saugroboters aus, inklusive:
- Batteriestand
- Aktueller Raum (falls Reinigung läuft)
- Zustand und verbleibende Lebensdauer aller Komponenten wie Mopp-Pad, Hauptbürste, Seitenbürste, Filter, Wassertanks, Reinigungsmittel, Silberioneneinheit und Sensoren
Szenario 2: Mopp reinigen
„Alexa, Roboter Mopp reinigen.“
📌 Der Roboter kehrt zur Station zurück und startet die Mopp-Reinigung. Das Mopp-Pad wird dabei gespült und für die nächste Reinigung vorbereitet.
Szenario 3: Einzelne Komponente zurücksetzen
„Alexa, Roboter Filter zurücksetzen.“
📌 Das System erkennt, dass du den Filter meinst, und setzt die Nutzungsanzeige zurück – ideal nach einer Reinigung oder einem Austausch.
Szenario 4: Staubbehälter entleeren
„Alexa, Roboter Staubbehälter leeren.“
📌 Der Roboter fährt zur Station und startet den Auto-Entleerungsvorgang. Der Staubbehälter wird automatisch geleert.
Szenario 5: Alle Komponenten zurücksetzen
„Alexa, Roboter alle komponenten zurücksetzen.“
📌 Mit diesem Befehl setzt das System die Nutzungszeit aller Komponenten (Bürsten, Filter, Mopp-Pad, Reinigungsmittel, Silberionen, Sensoren usw.) gleichzeitig zurück – ideal nach einer Wartung oder einem Kompletttausch.
Ich habe auf das Feedback der Closed-Beta-Tester reagiert und wichtige Probleme behoben.
-
Die Reinigung startet jetzt wie gewünscht per Alexa-Sprachbefehl. Befehle wie "saugen", "wischen" oder "moppen" funktionieren nun zuverlässig – auch für bestimmte Räume oder mit unterschiedlichen Reinigungsmodi in verschiedenen Räumen.
-
Das Zurücksetzen der Komponenten per Sprachbefehl funktioniert jetzt ebenfalls. Alle Komponenten wie Filter, Bürsten, Sensoren usw. lassen sich per Alexa zurücksetzen. Alexa gibt dabei eine klare Rückmeldung, ob etwas zurückgesetzt wurde oder ob ein Reset nötig ist.
Danach habe ich mich mit der gesamten Steuerlogik beschäftigt. Auch hier funktioniert jetzt alles wie gewünscht
– inklusive Sprachrückmeldungen von Alexa.Jetzt habe ich mit der Entwicklung einer komplett neuen interaktiven Karte für Dreamehome begonnen. Sie wird unabhängig von der Originalkarte sein und bietet deutlich mehr Funktionen:
– Anzeige aller Räume, Teppiche und virtuellen Grenzen
– Darstellung des Reinigungspfads in Echtzeit
– Steuerung direkt über Buttons und Slider auf der Karte
– Animationen und Effekte für aktive Räume
– Volle Kontrolle, nicht nur AnzeigeDer Code ist noch nicht veröffentlicht, aber ich arbeite daran.
Ein kurzes Video zur Vorschau – damit ihr sehen könnt, wie weit ich schon bin. Es ist jetzt schon deutlich weiter als die originale Kartenfunktion.
https://youtube.com/shorts/eH6rYprOAOA
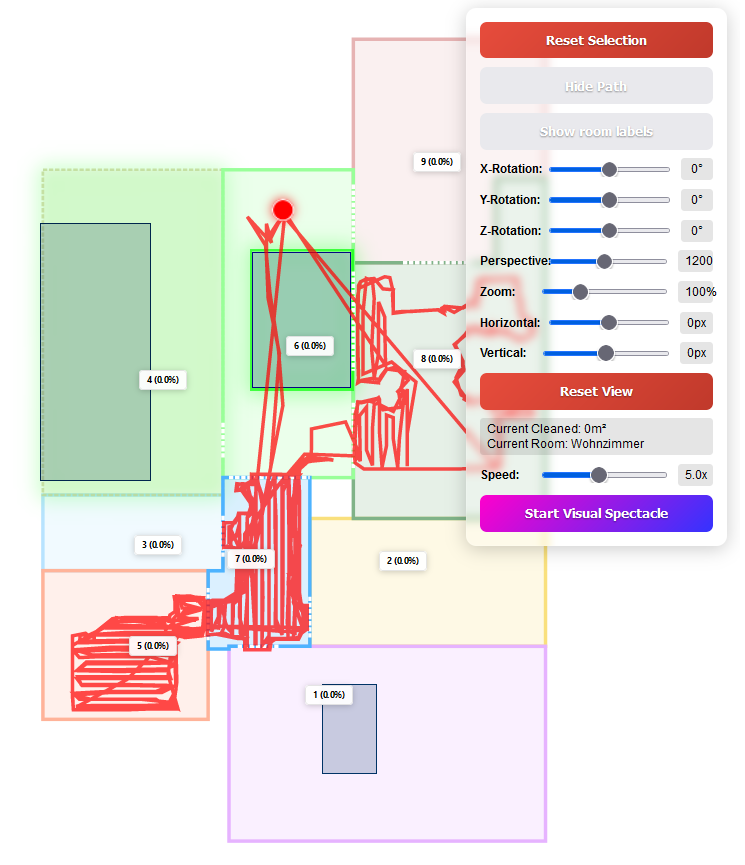
Dreamehome Map – Neue Karte in Arbeit
Noch nicht veröffentlicht – aber schon viel weiter als die Original-Version. -
-
Ich habe auf das Feedback der Closed-Beta-Tester reagiert und wichtige Probleme behoben.
-
Die Reinigung startet jetzt wie gewünscht per Alexa-Sprachbefehl. Befehle wie "saugen", "wischen" oder "moppen" funktionieren nun zuverlässig – auch für bestimmte Räume oder mit unterschiedlichen Reinigungsmodi in verschiedenen Räumen.
-
Das Zurücksetzen der Komponenten per Sprachbefehl funktioniert jetzt ebenfalls. Alle Komponenten wie Filter, Bürsten, Sensoren usw. lassen sich per Alexa zurücksetzen. Alexa gibt dabei eine klare Rückmeldung, ob etwas zurückgesetzt wurde oder ob ein Reset nötig ist.
Danach habe ich mich mit der gesamten Steuerlogik beschäftigt. Auch hier funktioniert jetzt alles wie gewünscht
– inklusive Sprachrückmeldungen von Alexa.Jetzt habe ich mit der Entwicklung einer komplett neuen interaktiven Karte für Dreamehome begonnen. Sie wird unabhängig von der Originalkarte sein und bietet deutlich mehr Funktionen:
– Anzeige aller Räume, Teppiche und virtuellen Grenzen
– Darstellung des Reinigungspfads in Echtzeit
– Steuerung direkt über Buttons und Slider auf der Karte
– Animationen und Effekte für aktive Räume
– Volle Kontrolle, nicht nur AnzeigeDer Code ist noch nicht veröffentlicht, aber ich arbeite daran.
Ein kurzes Video zur Vorschau – damit ihr sehen könnt, wie weit ich schon bin. Es ist jetzt schon deutlich weiter als die originale Kartenfunktion.
https://youtube.com/shorts/eH6rYprOAOA
Dreamehome Map – Neue Karte in Arbeit
Noch nicht veröffentlicht – aber schon viel weiter als die Original-Version.0.1.4 ist Online ;)
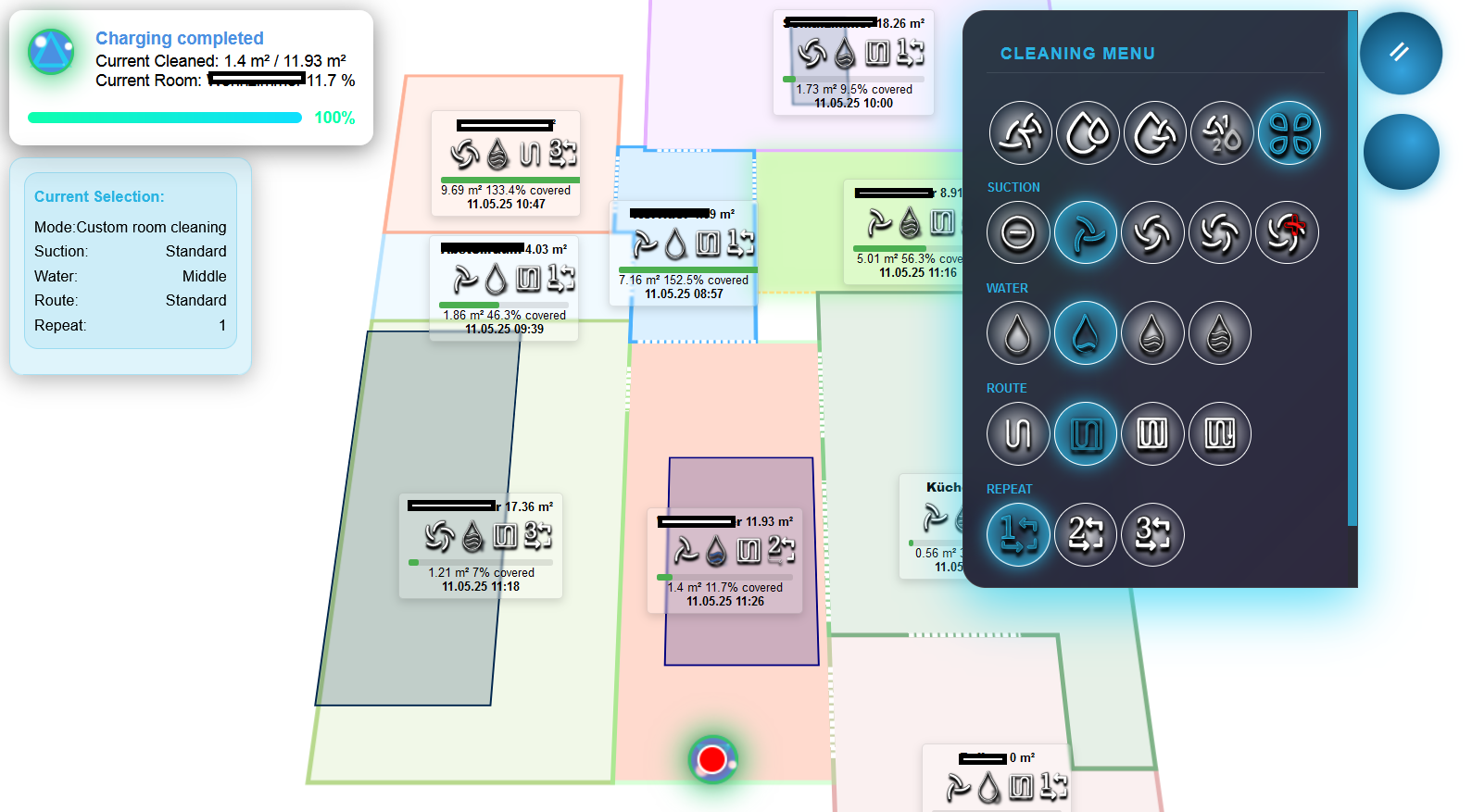
interaktive KarteHauptfunktionen:
-
Datenvorbereitung:
- Lädt die Roboter-Positionshistorie
- Ermittelt den Adapter-Pfad für die Zustandsspeicherung
- Verarbeitet die Positionsdaten in ein geeignetes Format
-
Kartenerstellung:
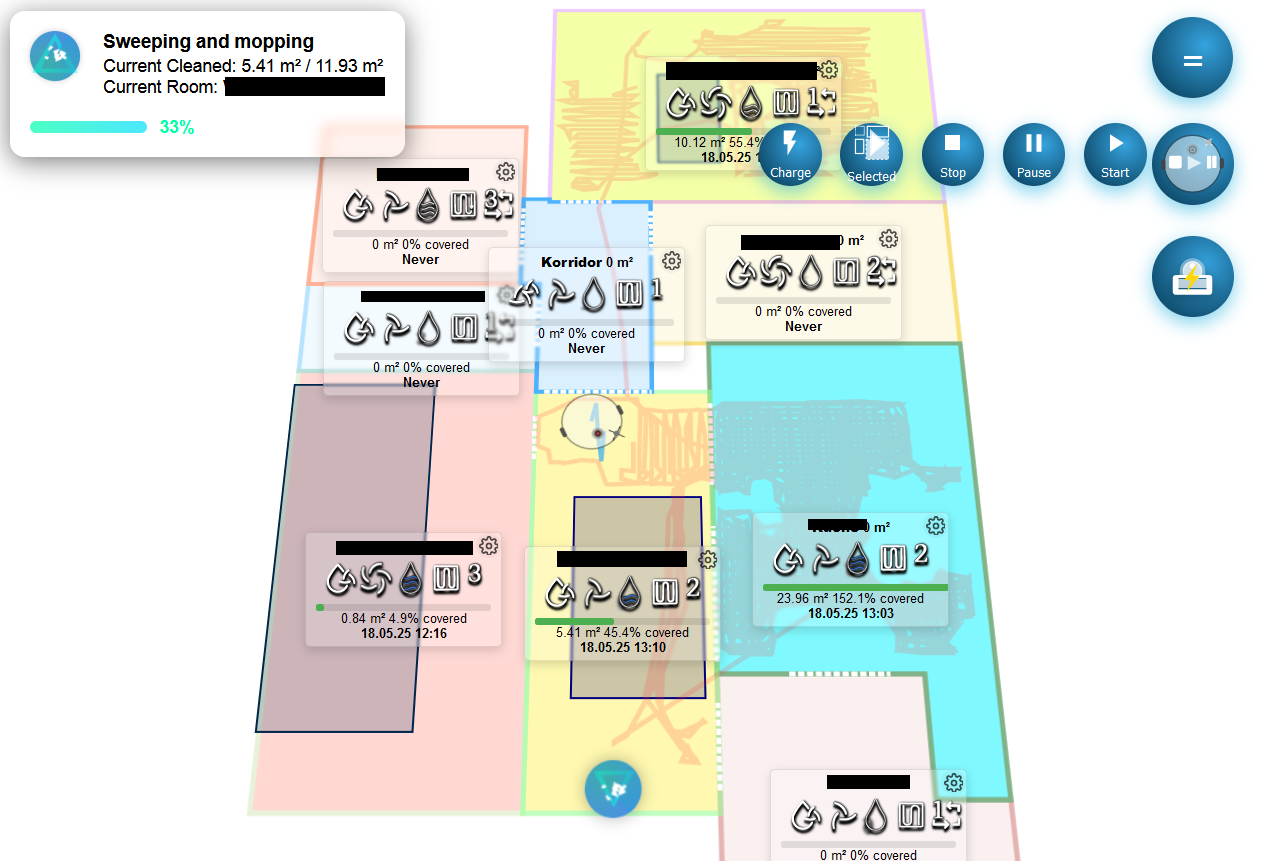
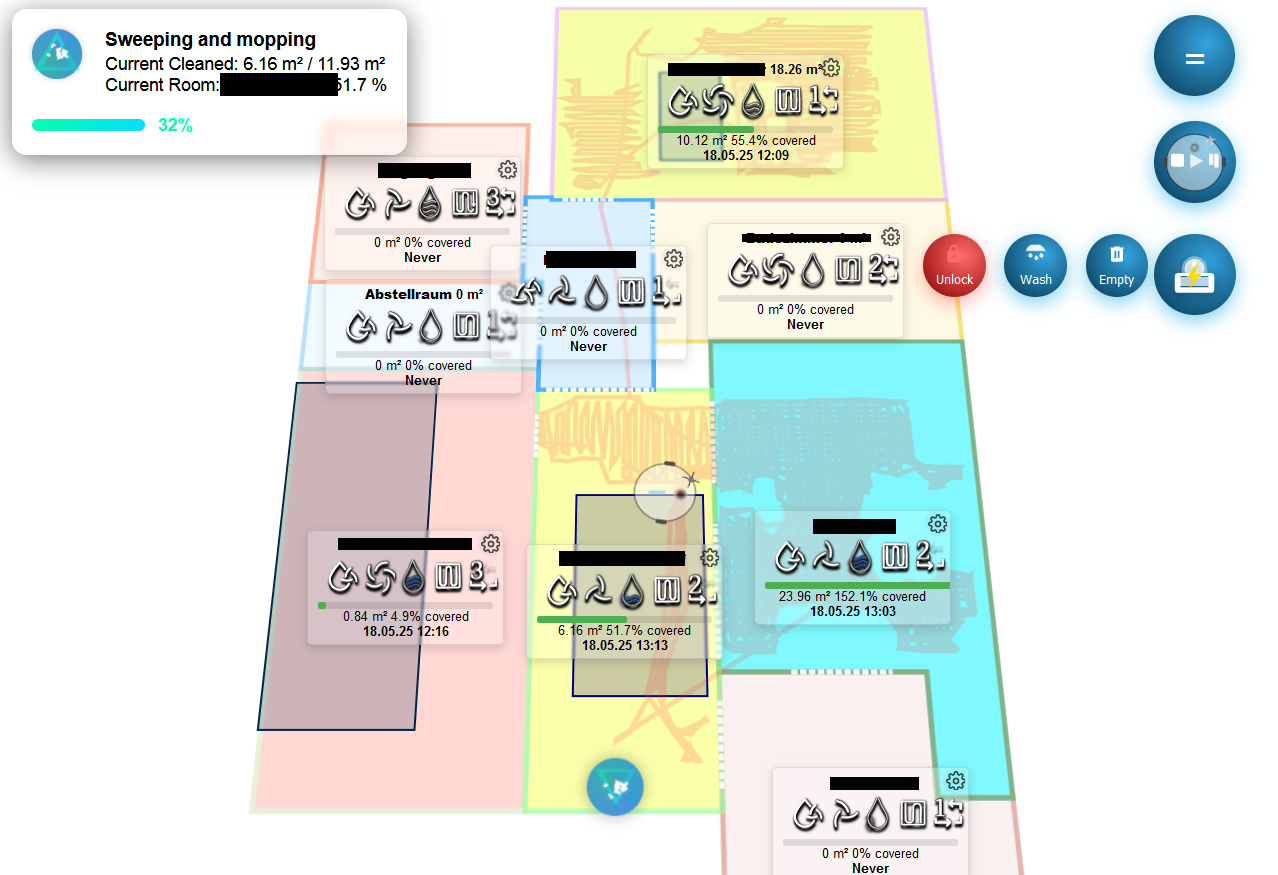
- Erstellt ein HTML-Dokument
- Zeichnet die Karte basierend auf den Roboter-Kartendaten (Räume, Wände, Türen, Ladestation)
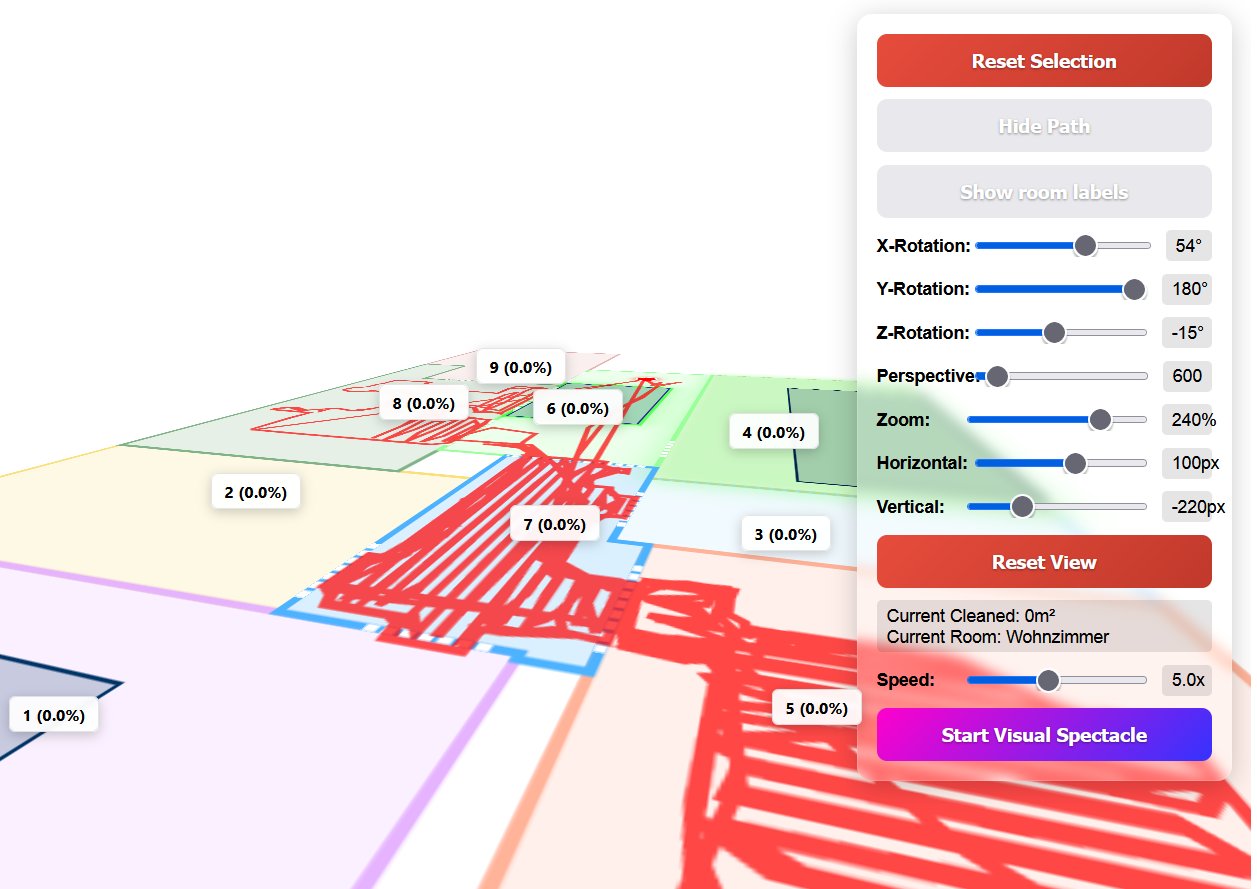
- Implementiert eine 3D-ansicht mit Rotations- und Zoomfunktionen
-
Interaktive Features:
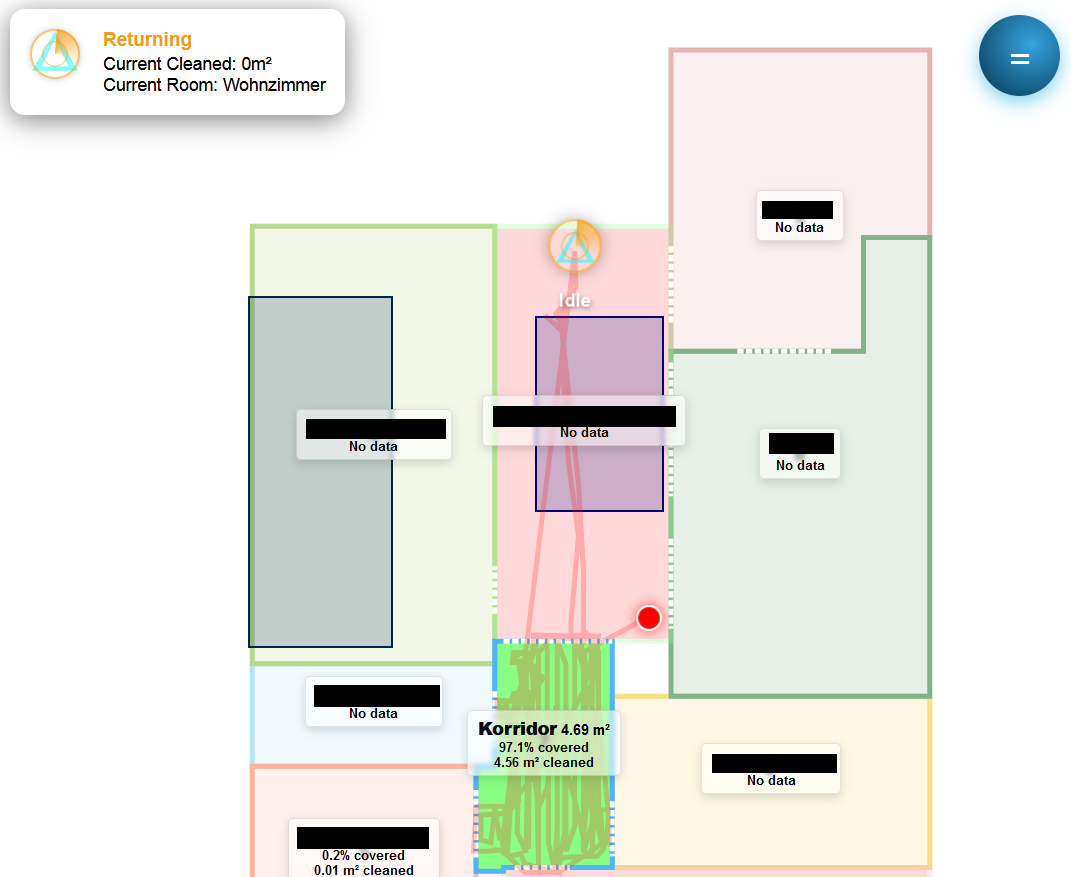
- Echtzeit-Positionsverfolgung des Roboters
- Auswahl von Räumen und Teppichen durch Klick (Die Auswahl funktioniert bereits, der Befehl zur Reinigung wird in der nächsten Version verfügbar sein).
- Anzeige von Reinigungsfortschritt und Raumdaten
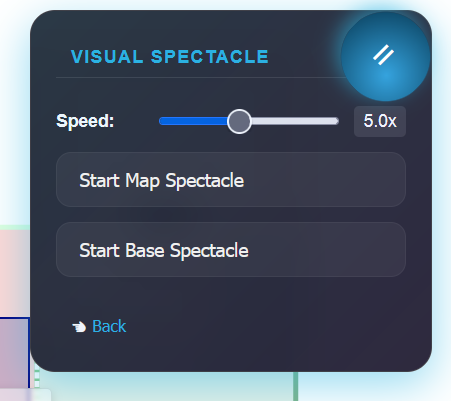
- Spektakuläre Animationsmodi ("Map Spectacle")
- Statusanimationen für die Ladestation
-
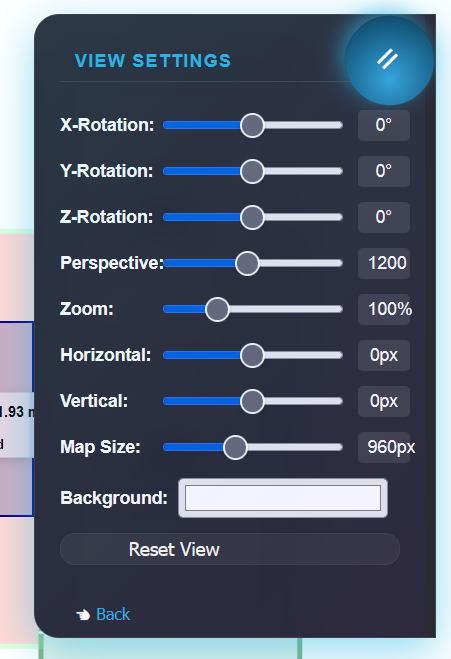
Benutzeroberfläche:
- Modernes Menüsystem mit Animationen
- Einstellungen für Kartenrotation, Perspektive und Zoom
- Anzeige von Roboterstatus und Reinigungsdaten
Technische Details:
- Die Karte wird als HTML-Canvas mit SVG-Elementen gerendert
- Verwendet WebSocket für Echtzeit-Updates der Roboterposition
- Implementiert eine ausgeklügelte 3D-Transformation mit CSS
Datenfluss:
- Roboterpositionsdaten werden vom Adapter abgerufen
- Die Karte wird skaliert und transformiert, um in den Canvas zu passen
- Interaktionen werden über Farbcodierung und Klickerkennung verarbeitet
- Statusupdates werden über WebSocket empfangen und visualisiert
Besondere Highlights:
- Die Ladestation zeigt unterschiedliche Animationen für verschiedene Status (Laden, Fehler, Reinigen etc. | 23 Animationen)
- Räume ändern Farbe basierend auf Reinigungsfortschritt
- Die "Map Spectacle"-Animation erzeugt dramatische Kamerafahrten um die Karte
- Das Menüsystem hat automatisches Timeout
Diese Methode erstellt im Wesentlichen eine komplette, interaktive Visualisierung der Roboterumgebung mit vielen Details und Animationen, die in Echtzeit auf Roboterstatusänderungen reagiert.
Um die Karte anzuzeigen, erstelle ein HTML-Widget in der Größe 1024x1024 oder nach Bedarf und packe den folgenden Code hinein: {dreamehome.0.XXXXXX.vis.vishtml1}
Dabei ist XXXXXX die Nummer deines Roboters. -
-
0.1.4 ist Online ;)
interaktive KarteHauptfunktionen:
-
Datenvorbereitung:
- Lädt die Roboter-Positionshistorie
- Ermittelt den Adapter-Pfad für die Zustandsspeicherung
- Verarbeitet die Positionsdaten in ein geeignetes Format
-
Kartenerstellung:
- Erstellt ein HTML-Dokument
- Zeichnet die Karte basierend auf den Roboter-Kartendaten (Räume, Wände, Türen, Ladestation)
- Implementiert eine 3D-ansicht mit Rotations- und Zoomfunktionen
-
Interaktive Features:
- Echtzeit-Positionsverfolgung des Roboters
- Auswahl von Räumen und Teppichen durch Klick (Die Auswahl funktioniert bereits, der Befehl zur Reinigung wird in der nächsten Version verfügbar sein).
- Anzeige von Reinigungsfortschritt und Raumdaten
- Spektakuläre Animationsmodi ("Map Spectacle")
- Statusanimationen für die Ladestation
-
Benutzeroberfläche:
- Modernes Menüsystem mit Animationen
- Einstellungen für Kartenrotation, Perspektive und Zoom
- Anzeige von Roboterstatus und Reinigungsdaten
Technische Details:
- Die Karte wird als HTML-Canvas mit SVG-Elementen gerendert
- Verwendet WebSocket für Echtzeit-Updates der Roboterposition
- Implementiert eine ausgeklügelte 3D-Transformation mit CSS
Datenfluss:
- Roboterpositionsdaten werden vom Adapter abgerufen
- Die Karte wird skaliert und transformiert, um in den Canvas zu passen
- Interaktionen werden über Farbcodierung und Klickerkennung verarbeitet
- Statusupdates werden über WebSocket empfangen und visualisiert
Besondere Highlights:
- Die Ladestation zeigt unterschiedliche Animationen für verschiedene Status (Laden, Fehler, Reinigen etc. | 23 Animationen)
- Räume ändern Farbe basierend auf Reinigungsfortschritt
- Die "Map Spectacle"-Animation erzeugt dramatische Kamerafahrten um die Karte
- Das Menüsystem hat automatisches Timeout
Diese Methode erstellt im Wesentlichen eine komplette, interaktive Visualisierung der Roboterumgebung mit vielen Details und Animationen, die in Echtzeit auf Roboterstatusänderungen reagiert.
Um die Karte anzuzeigen, erstelle ein HTML-Widget in der Größe 1024x1024 oder nach Bedarf und packe den folgenden Code hinein: {dreamehome.0.XXXXXX.vis.vishtml1}
Dabei ist XXXXXX die Nummer deines Roboters. -
-
„You go!“
Unter GitHub ist noch kein Update – und das hat seinen Grund.Was schon funktioniert? Lasst euch überraschen!
Genau deshalb habe ich es noch nicht hochgeladen.Manches muss reifen, manches soll wirken – und manches verdient einfach einen großen Auftritt.
Bleibt dran! ;)
⬇️ Download main.js
Gefixt wird nur, was kommuniziert wird.
Edit!
Zur Performance und zum Ressourcenverbrauch:
Mich interessiert vor allem der Ressourcenverbrauch, da in der Grafik viele Manipulationen stattfinden. Ich habe daher fast alles entfernt, was unnötig Leistung zieht.Unter VIS läuft es bei mir sehr flüssig, und auch im ioBroker liegt die Speicherauslastung während der „Reinigung“ bei maximal 128 MB.
Ich kann aber nur für mein Setup sprechen:
Ich nutze einen Raspberry Pi 5 mit 16 GB RAM, und das angebundene Tablet ist von mittlerer Qualität.Die Performance kann je nach System natürlich unterschiedlich ausfallen.
-
„You go!“
Unter GitHub ist noch kein Update – und das hat seinen Grund.Was schon funktioniert? Lasst euch überraschen!
Genau deshalb habe ich es noch nicht hochgeladen.Manches muss reifen, manches soll wirken – und manches verdient einfach einen großen Auftritt.
Bleibt dran! ;)
⬇️ Download main.js
Gefixt wird nur, was kommuniziert wird.
Edit!
Zur Performance und zum Ressourcenverbrauch:
Mich interessiert vor allem der Ressourcenverbrauch, da in der Grafik viele Manipulationen stattfinden. Ich habe daher fast alles entfernt, was unnötig Leistung zieht.Unter VIS läuft es bei mir sehr flüssig, und auch im ioBroker liegt die Speicherauslastung während der „Reinigung“ bei maximal 128 MB.
Ich kann aber nur für mein Setup sprechen:
Ich nutze einen Raspberry Pi 5 mit 16 GB RAM, und das angebundene Tablet ist von mittlerer Qualität.Die Performance kann je nach System natürlich unterschiedlich ausfallen.
V 0.1.5 Online
Neue Funktionen
Dynamische VIS-Objekte & Kartenerstellung
Integration dynamischer Visualisierungsobjekte für eine flexible und anpassbare Anzeige.Aktions-Dropdown-Menü
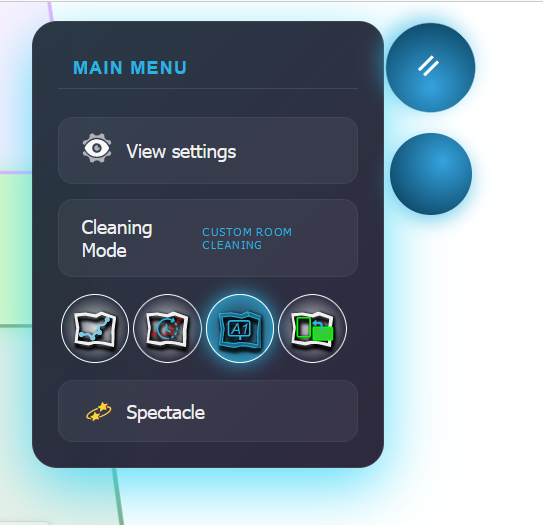
Neue Steuerungsoptionen verfügbar: Pause, Reinigen, Laden, Stopp.Allgemeines Reinigungsmenü (derzeit deaktiviert)
Vorbereitete Funktion zur Einleitung einer Komplettreinigung über ein zentrales Steuerungsmenü.Neue Funktions-Buttons in der Kartenansicht
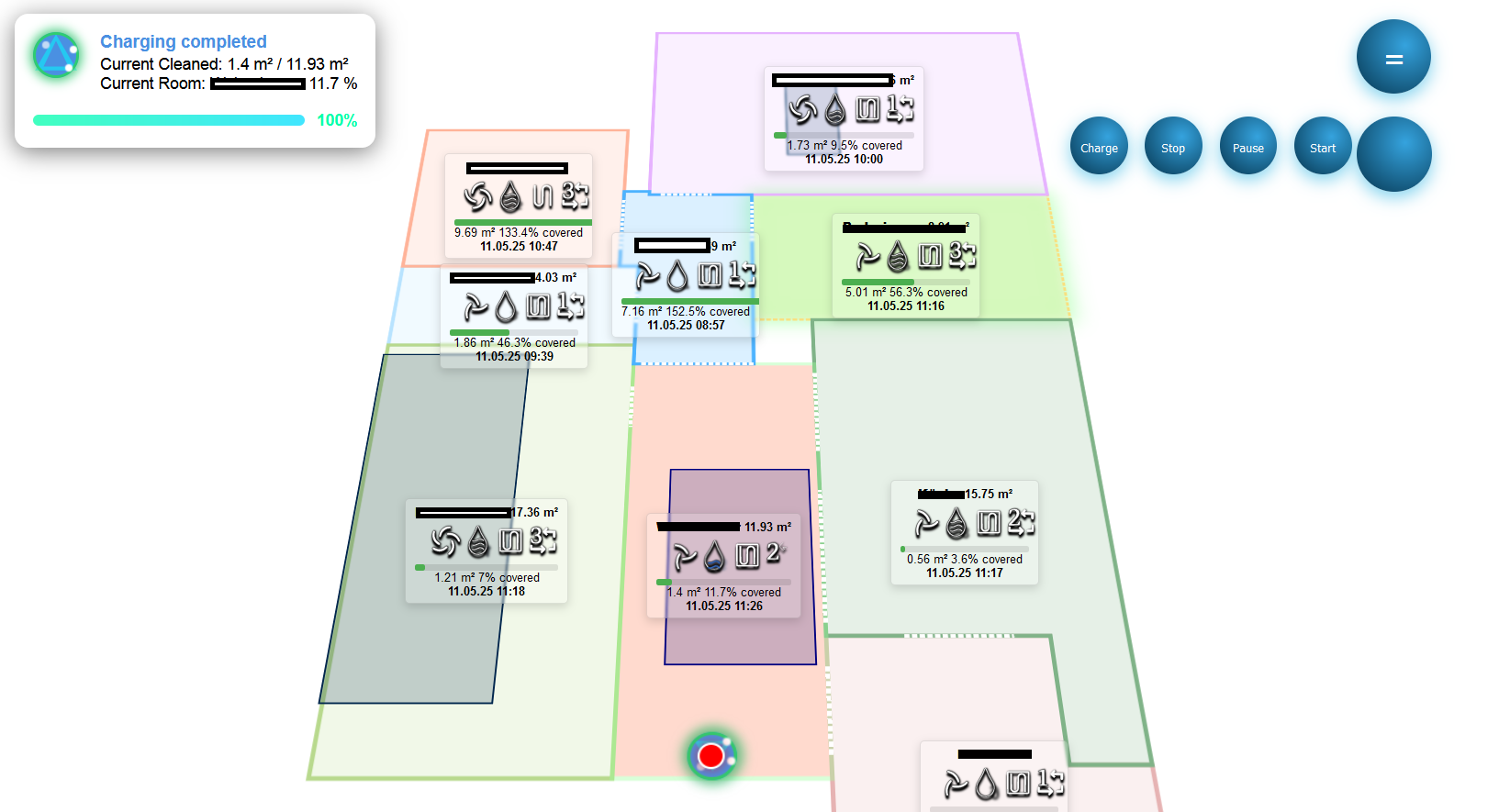
Hinzugefügte Aktionen: Tastensperre, Roboter entleeren, Mopp waschen, Start, Pause, Reinigen, Laden, Auswahl reinigen.Ein- und ausblendbare Reinigungs- & Verlaufspfade
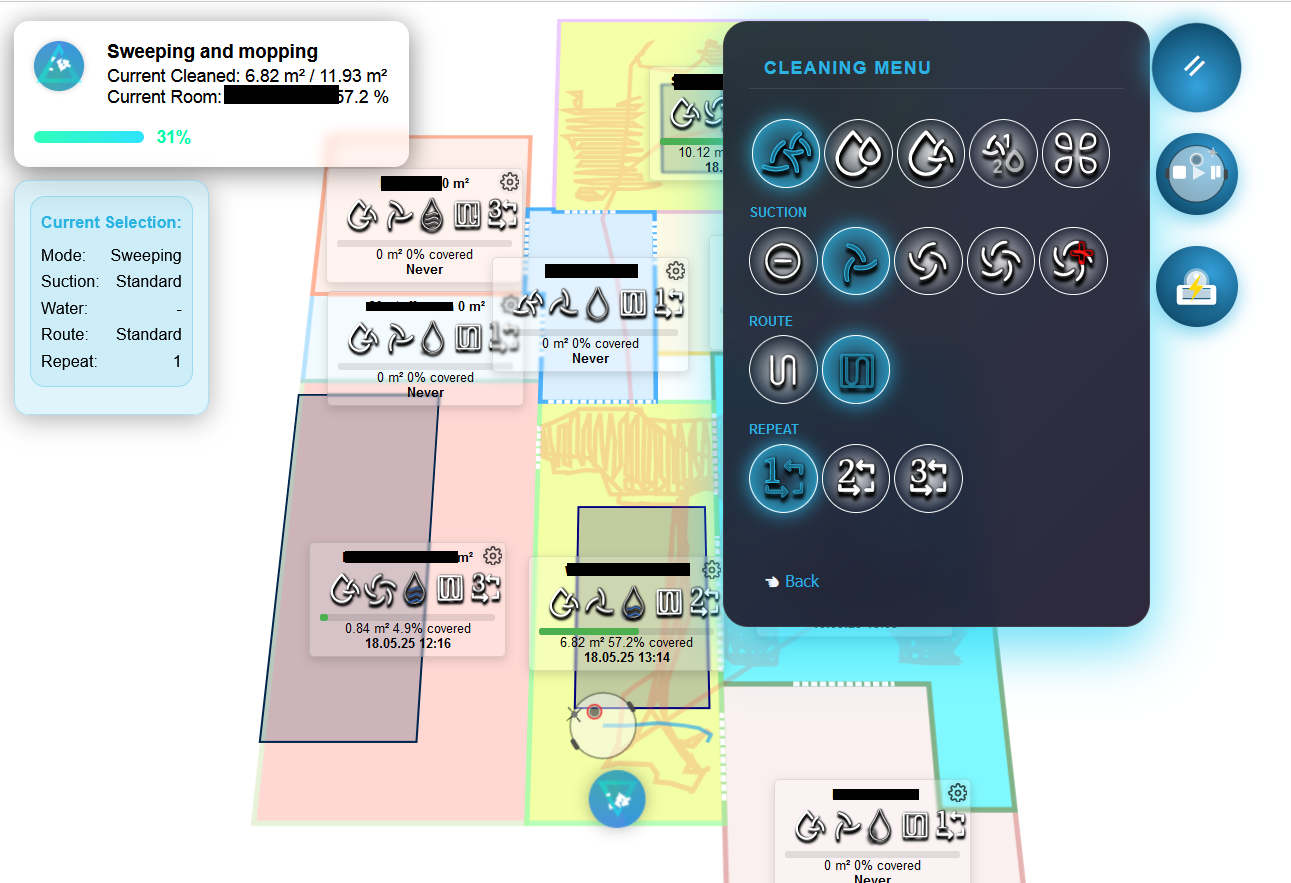
Aktueller Reinigungsverlauf und Historie können individuell ein- oder ausgeblendet werden.Radialmenü pro Raum
Jeder Raum verfügt nun über ein eigenes Radialmenü zur individuellen Konfiguration: Saugkraft, Wasserstand, Wiederholen, Reinigungsmodus, Route.Animierte Symbole für aktive Reinigung
Räume, die aktuell gereinigt werden, werden mit animierten Symbolen hervorgehoben.Realistische Robotersymbole
Standardsymbole wurden durch detaillierte und realistische Roboterdarstellungen ersetzt.
Verbesserungen
Effizienterer Code
Optimierte Algorithmen reduzieren den Speicher- und CPU-Verbrauch erheblich.Speichern & Wiederherstellen der 3D-Kartenrotation
Aktuelle Kameraposition, -rotation sowie ausgewählte Räume und Teppiche werden gespeichert und nach einem Neustart des Adapters oder Neuladen der Seite korrekt wiederhergestellt.Verbesserter Reinigungsstatus
- Probleme beim Laden des Reinigungsstatus wurden behoben, sodass die Historie nun korrekt mit Daten gefüllt wird.
- Der Fortschritt laufender Reinigungsaufträge wird jetzt korrekt und in Echtzeit angezeigt.
Neue Logik zum Starten der Reinigung
Es gibt jetzt drei Möglichkeiten, eine Reinigung zu starten:
-
Komplettreinigung per Kartenklick
Auf Reinigen in der Karte klicken: Allgemeine Reinigungseinstellungen aus der App werden übernommen und die Reinigung startet sofort. -
Gezielte Raumreinigung
- Einzelne Räume per Klick auswählen (blinken grün).
- Dann Auswahl reinigen drücken – nur die ausgewählten Räume werden gereinigt.
- Raumspezifische Einstellungen (Saugkraft, Wasserstand, Wiederholen, Reinigungsmodus, Route) können über das Zahnrad-Symbol im jeweiligen Raumlabel angepasst werden.
-
Auswahl reinigen ohne Auswahl
Wird Auswahl reinigen gedrückt, ohne zuvor Räume ausgewählt zu haben, werden alle Räume gemäß der individuellen Einstellungen in den Raumlabels gereinigt.
Viel Spaß ;)
Exzellenz erkennt man leise. -
V 0.1.5 Online
Neue Funktionen
Dynamische VIS-Objekte & Kartenerstellung
Integration dynamischer Visualisierungsobjekte für eine flexible und anpassbare Anzeige.Aktions-Dropdown-Menü
Neue Steuerungsoptionen verfügbar: Pause, Reinigen, Laden, Stopp.Allgemeines Reinigungsmenü (derzeit deaktiviert)
Vorbereitete Funktion zur Einleitung einer Komplettreinigung über ein zentrales Steuerungsmenü.Neue Funktions-Buttons in der Kartenansicht
Hinzugefügte Aktionen: Tastensperre, Roboter entleeren, Mopp waschen, Start, Pause, Reinigen, Laden, Auswahl reinigen.Ein- und ausblendbare Reinigungs- & Verlaufspfade
Aktueller Reinigungsverlauf und Historie können individuell ein- oder ausgeblendet werden.Radialmenü pro Raum
Jeder Raum verfügt nun über ein eigenes Radialmenü zur individuellen Konfiguration: Saugkraft, Wasserstand, Wiederholen, Reinigungsmodus, Route.Animierte Symbole für aktive Reinigung
Räume, die aktuell gereinigt werden, werden mit animierten Symbolen hervorgehoben.Realistische Robotersymbole
Standardsymbole wurden durch detaillierte und realistische Roboterdarstellungen ersetzt.
Verbesserungen
Effizienterer Code
Optimierte Algorithmen reduzieren den Speicher- und CPU-Verbrauch erheblich.Speichern & Wiederherstellen der 3D-Kartenrotation
Aktuelle Kameraposition, -rotation sowie ausgewählte Räume und Teppiche werden gespeichert und nach einem Neustart des Adapters oder Neuladen der Seite korrekt wiederhergestellt.Verbesserter Reinigungsstatus
- Probleme beim Laden des Reinigungsstatus wurden behoben, sodass die Historie nun korrekt mit Daten gefüllt wird.
- Der Fortschritt laufender Reinigungsaufträge wird jetzt korrekt und in Echtzeit angezeigt.
Neue Logik zum Starten der Reinigung
Es gibt jetzt drei Möglichkeiten, eine Reinigung zu starten:
-
Komplettreinigung per Kartenklick
Auf Reinigen in der Karte klicken: Allgemeine Reinigungseinstellungen aus der App werden übernommen und die Reinigung startet sofort. -
Gezielte Raumreinigung
- Einzelne Räume per Klick auswählen (blinken grün).
- Dann Auswahl reinigen drücken – nur die ausgewählten Räume werden gereinigt.
- Raumspezifische Einstellungen (Saugkraft, Wasserstand, Wiederholen, Reinigungsmodus, Route) können über das Zahnrad-Symbol im jeweiligen Raumlabel angepasst werden.
-
Auswahl reinigen ohne Auswahl
Wird Auswahl reinigen gedrückt, ohne zuvor Räume ausgewählt zu haben, werden alle Räume gemäß der individuellen Einstellungen in den Raumlabels gereinigt.
Viel Spaß ;)
Exzellenz erkennt man leise. -
Ich setze noch eine drauf – läuft.
Der Farbwert eines Elements wird basierend auf einem Prozentwert (0-100%) in der HSL-Skala berechnet, wobei der Farbton von rot (0°) bis blau (240°) reicht. ;)
@wawyo Hi, ich habe deinen Adapter erst neulich gefunden, davor hab ich den Dreame Adapter genutzt. Der unterschied ist ja gigantisch. Endlich sehe ich alle werte für mein Model. Tolle Arbeit!
Eine Frage habe ich allerdings, ich möchte die Werte auch mit Tastenfunktionen auf meinem NSPanel nutzen. Wie kann ich Custom Start Befehle ausführen, zb. Reinige Wohnzimmer nur Saugen.
Gibt es dafür eine Möglichkeit? Der Adapter parst ja auch die Alexa eingaben.
-
@wawyo Hi, ich habe deinen Adapter erst neulich gefunden, davor hab ich den Dreame Adapter genutzt. Der unterschied ist ja gigantisch. Endlich sehe ich alle werte für mein Model. Tolle Arbeit!
Eine Frage habe ich allerdings, ich möchte die Werte auch mit Tastenfunktionen auf meinem NSPanel nutzen. Wie kann ich Custom Start Befehle ausführen, zb. Reinige Wohnzimmer nur Saugen.
Gibt es dafür eine Möglichkeit? Der Adapter parst ja auch die Alexa eingaben.
@max_yeah vielen Dank für dein tolles Feedback – freut mich sehr, dass der Adapter für dein Modell so gut funktioniert! 😊
Deinen Wunsch nach Custom-Startbefehlen (z. B. „Reinige Wohnzimmer nur Saugen“) nehme ich gerne für die nächste Version auf – das ist definitiv sinnvoll, gerade für NSPanel-Nutzer.
Aktuell ist Version v0.1.7 nur über GitHub verfügbar, nicht über npm. Du kannst sie also direkt von dort installieren, falls du die neuesten Funktionen testen möchtest.
-
Aktuelle Test Version 2.0.0 Veröffentlichungsdatum 08.04.2026 Github Link https://github.com/spayrosam/ioBroker.dreamehome 



Um die Karte anzuzeigen, erstelle ein HTML-Widget in der Größe 1024x1024 oder nach Bedarf und packe den folgenden Code hinein:
{dreamehome.0.XXXXXX.vis.vishtml1}Dabei ist XXXXXX die Nummer deines Roboters.
📋 Inhaltsverzeichnis
- [Features]
- [Unterstützte Modelle]
- [Installation]
- [Konfiguration]
- [Sprachsteuerung]
- [VIS-Widgets]
- [Lernsystem]
- [Wasserverbrauchs-Tracking]
- [Fehlerbehebung]
✨ Features
🔌 Cloud-Integration
- Vollständige Anbindung an die Dreame-Cloud
- Automatisches Token-Management mit Refresh
- MQTT-Echtzeitkommunikation mit dem Roboter
🗺️ Interaktive Karten (VIS)
- 3D-Kartenansicht mit Rotation, Zoom und Perspektive
- Klickbare Räume und Teppiche zur Auswahl
- Live-Roboter-Position mit Animation
- Reinigungspfad mit farbiger Raumzuordnung
- Anzeige von Wänden, Türen und Möbeln
- Reinigungs-Historie als Overlay mit Pfad-Vorschau
- Komponenten-Status (Bürsten, Filter, etc.) mit Fortschrittsbalken
🎤 Sprachsteuerung
- Alexa-Integration: Natürliche Sprachbefehle
- Telegram-Support: Steuerung per Chat
- Mehrsprachig (Deutsch/Englisch)
🧠 Lernendes System
- Analysiert Reinigungsmuster pro Raum
- Lernt bevorzugte Einstellungen (Saugstufe, Wassermenge)
- Kann fehlende Sprachbefehle automatisch ergänzen
- Gibt Empfehlungen mit Konfidenz-Werten
💧 Wasserverbrauchs-Tracking
- Für Modelle mit Wassertank und Waschstation
- Berechnet Verbrauch pro m² (ml/m²)
- Lernt aus historischen Daten (KI-gestützt)
- Separate Verfolgung von Reinigungsmittel (Detergent)
- Warnungen bei niedrigem Füllstand
🧹 Umfassende Steuerung
- Start/Pause/Stop/Charging
- Raumweise Reinigung mit individuellen Einstellungen
- Teppichreinigung mit Intensitätsstufen
- Esstisch-Zonen (automatische Erkennung)
- Auto-Empty und Mop-Washing
- Komponenten-Reset (Bürsten, Filter, Sensoren)
📊 Status & Monitoring
- Alle Roboter-Status (Saugstufe, Wassermenge, Fehler)
- Verschleißteile mit Restlebensdauer
- Reinigungsverlauf mit Statistiken
- Ressourcen-Monitoring (Speicher, Event-Loop)
🤖 Unterstützte Modelle
Der Adapter unterstützt nahezu alle Dreame-Staubsaugerroboter mit Cloud-Anbindung:
Serie Modelle Besonderheiten Matrix / X-Serie Matrix 10 Ultra/Pro, X30 Ultra, X40 Ultra 5.0L Tank, Mop-Typen A/B/C L-Serie L20 Ultra, L30 Ultra, L10s Ultra/Pro 4.5L / 4.0L Tank Z-Serie Z10, Z20, Z30 Pro 5.0L Tank W-Serie W10, W20, W30 4.0L Tank F-Serie F9, F10 3.0L Tank D-Serie D9, D10, D20 2.0L - 2.5L Tank Bei nicht gelisteten Modellen wird automatisch die Tankkapazität erkannt oder ein Standardwert verwendet.
📦 Installation
Voraussetzungen
- Node.js 18 oder höher (mit
--expose-gcempfohlen) - ioBroker js-controller 5.0 oder höher
- Canvas-Bibliothek für die Kartendarstellung
Installation über GitHub (Adapter ist nicht im offiziellen npm-Repository verfügbar)
Methode 1: Über die ioBroker-Admin-Oberfläche
- Öffne die ioBroker-Admin-Oberfläche
- Gehe zu "Adapter" → "Eigene Adapter"
- Füge folgende GitHub-URL hinzu: https://github.com/spayrosam/ioBroker.dreamehome
- Klicke auf "Installieren"
Wichtig: Canvas-Bibliothek
Die Canvas-Bibliothek wird für die Kartendarstellung benötigt. Überprüfe die Installation mit:
cd /opt/iobroker npm list canvasFalls nicht installiert:
cd /opt/iobroker npm install canvas
⚙️ Konfiguration
Grundeinstellungen
Feld Beschreibung Benutzername Dein Dreame-Account (E-Mail) Passwort Dein Dreame-Passwort Geräteindex Bei mehreren Robotern: 0 = erstes Gerät Auto-Fallback Automatisch auf erstes Gerät wechseln Erweiterte Einstellungen
Feld Beschreibung Standard Aktualisierungsintervall Wie oft Daten abgerufen werden 60 Sekunden Speicher-Limit Maximaler Heap-Speicher 150 MB Event-Loop-Limit Max. Event-Loop-Verzögerung 50 ms GC aktivieren Garbage Collection true Memory Cleaner Automatische Speicherbereinigung true Cleaner-Schwelle Ab wann bereinigt wird 300 MB Cleaner-Intervall Wie oft geprüft wird 30 Sekunden
🎤 Sprachsteuerung
Alexa-Integration
Der Adapter erkennt automatisch, ob der Alexa-Adapter installiert ist. Du kannst natürliche Sprachbefehle mit Alexa verwenden.
Wichtig: Befehle für Komponenten-Status, Reset, Auto-Empty und Mop-Washing MÜSSEN ein Robot-Keyword wie "roboter", "saugroboter" oder "dreame" enthalten. Raumreinigungsbefehle funktionieren mit oder ohne Robot-Keyword.
Robot-Keywords (müssen in bestimmten Befehlen enthalten sein)
Deutsche Keywords roboter,dreame,staubsauger,saugroboter,putzroboter,staubi,saug-bot,reinigungsroboterGrundlegende Befehle
Was du zu Alexa sagen musst "Alexa, starte den Roboter" "Alexa, starte die Reinigung" "Alexa, stoppe den Roboter" "Alexa, stoppe die Reinigung" "Alexa, pausiere den Roboter" "Alexa, pausiere" "Alexa, Roboter zur Ladestation" "Alexa, zur Ladestation" Raumreinigung
Was du zu Alexa sagen musst "Alexa, saug die Küche" "Alexa, wisch das Bad" "Alexa, saug das Wohnzimmer zweimal" "Alexa, saug die Küche leise" "Alexa, saug die Küche standard" "Alexa, saug die Küche stark" "Alexa, saug die Küche turbo" "Alexa, wisch das Bad niedrig" "Alexa, wisch das Bad mittel" "Alexa, wisch das Bad hoch" Kombinierte Raum-Befehle
Was du zu Alexa sagen musst "Alexa, saug die Küche zweimal und wisch das Bad" "Alexa, saug die Küche leise und wisch das Bad hoch" "Alexa, saug die Küche dreimal und wisch das Bad zweimal" Auto-Empty (MUSS Robot-Keyword enthalten)
Was du zu Alexa sagen musst "Alexa, Roboter leeren" "Alexa, Saugroboter entleeren" "Alexa, Dreame leeren" "Alexa, Staubsauger leeren" Mop-Washing (MUSS Robot-Keyword enthalten)
Was du zu Alexa sagen musst "Alexa, Roboter waschen" "Alexa, Saugroboter Mopp waschen" "Alexa, Dreame waschen" "Alexa, Roboter Mopp reinigen" Komponenten-Status (MUSS Robot-Keyword enthalten)
Was du zu Alexa sagen musst "Alexa, Roboter Status" "Alexa, Roboter prüfen" "Alexa, Roboter wie ist der Filter" "Alexa, Roboter prüfe Filter" "Alexa, Roboter wie ist die Hauptbürste" "Alexa, Roboter prüfe Seitenbürste" "Alexa, Roboter wie ist das Wischpad" "Alexa, Roboter prüfe Sensor" "Alexa, Roboter wie ist das Reinigungsmittel" "Alexa, Roboter prüfe Wassertank" Komponenten zurücksetzen (MUSS Robot-Keyword enthalten)
Was du zu Alexa sagen musst "Alexa, Roboter alles zurücksetzen" "Alexa, Roboter alle Komponenten zurücksetzen" "Alexa, Roboter Filter zurücksetzen" "Alexa, Roboter Hauptbürste zurücksetzen" "Alexa, Roboter Seitenbürste zurücksetzen" "Alexa, Roboter Wischpad zurücksetzen" Abbruch-Befehle
Was du zu Alexa sagen musst "Alexa, Reinigung abbrechen" "Alexa, stoppe Reinigung" Teppichreinigung
Was du zu Alexa sagen musst "Alexa, reinige den Teppich im Wohnzimmer" "Alexa, reinige den Teppich im Schlafzimmer" "Alexa, Teppich im Wohnzimmer leicht" "Alexa, Teppich im Wohnzimmer mittel" "Alexa, Teppich im Wohnzimmer stark" Esstisch-Reinigung
Was du zu Alexa sagen musst "Alexa, reinige den Esstisch" "Alexa, reinige den Esstisch im Wohnzimmer" "Alexa, saug unter dem Esstisch" "Alexa, wisch um den Esstisch" "Alexa, reinige Esstisch schnell" "Alexa, reinige Esstisch standard" "Alexa, reinige Esstisch gründlich" Hilfemenü
Was du zu Alexa sagen musst "Alexa, Hilfe für den Roboter" "Alexa, Roboter Hilfe" "Alexa, Hilfe für den Staubsauger" Das Hilfemenü führt dich dann durch:
- 1 Staubbehälter leeren
- 2 Mopp waschen
- 3 Komponentenstatus prüfen
- 4 Komponenten zurücksetzen
- 5 Raumreinigung
- 6 Teppichreinigung
- 7 Esstisch-Reinigung
- 8 Synonym-Beispiele und Sprachbefehle
Telegram-Integration
Der Adapter unterstützt auch die Steuerung über Telegram. Sende Nachrichten wie:
Befehl starte den RoboterRoboter StatusRoboter Filter zurücksetzenRoboter leerenRoboter waschen
🖼️ VIS-Widgets
Der Adapter generiert eine interaktive Karte für das VIS. Zugriff über:
dreamehome.0.[DEIN-DID].vis.vishtml0Features der Karte
🎮 Steuerungsmenü (rechts)
- Start/Pause/Stop/Charge
- Auto-Empty und Mop-Washing
- Reinigungsmodus-Auswahl (Saugen/Wischen/Beides)
- Individuelle Raumeinstellungen
🔧 Ansichtsmenü
- 3D-Rotation (X/Y/Z)
- Zoom und Perspektive
- Hintergrundfarbe
- Ein-/Ausblenden von Pfaden und Labels
📊 Status-Infos (oben links)
- Aktueller Raum mit Reinigungsfortschritt
- Batteriestand
- Komponenten-Status (Bürsten, Filter, etc.)
🖱️ Interaktion
- Klick auf Räume: Auswahl für gezielte Reinigung
- Klick auf Teppiche: Gezielte Teppichreinigung
- Klick auf Einstellungs-Icon: Individuelle Raum-Einstellungen
📜 Reinigungsverlauf-System
Der Adapter enthält ein umfassendes Reinigungsverlauf-System mit:
- Listenansicht aller vergangenen Reinigungen mit Datum, Fläche, Dauer und Status
- Detailansicht mit vollständigen Statistiken, Raumreihenfolge und individuellen Einstellungen
- Hinderniserkennung für über 30 Typen (Schuhe, Kabel, Haustiere, Möbelbeine, usw.)
- Blockierte Räume Visualisierung mit 45°-Schraffurmuster und farbcodierten Gründen
- Datumsauswahl mit Kalender zur einfachen Navigation (Heute, Gestern, 7T, 30T)
- Pfaddarstellung mit raumbasierten Farben und Segmenterkennung
- Metadaten & Statistiken inklusive Bewegungsaktionen, KI-Modell und Hinderniszähler
- Vollständige Deutsch/Englisch Sprachunterstützung
Klicke auf die Verlaufsschaltfläche (Uhrensymbol) auf der Karte, um zu beginnen.
🧠 Lernsystem
Der Adapter lernt aus deinen Reinigungen und wird mit der Zeit intelligenter.
Wie es funktioniert
- Datenerfassung: Jede Reinigung wird analysiert (Raum, Saugstufe, Wassermenge, Erfolg)
- Mustererkennung: Das System erkennt Vorlieben pro Raum
- Empfehlungen: Bei fehlenden Angaben in Sprachbefehlen werden gelernte Werte vorgeschlagen
Lernbefehle
Was du zu Alexa sagen musst "Alexa, was hast du gelernt?" "Alexa, zeige Lernstatistiken" "Alexa, Empfehlung für die Küche" "Alexa, lösche Lernhistorie" "Alexa, welche Räume gelernt?" Konfigurierbare Parameter
Parameter Beschreibung Standard MinCoverageForLearnMin. Abdeckung zum Lernen 80% MinCleaningsForConfidenceMin. Reinigungen für hohe Konfidenz 3 AutoCompleteMinConfidenceMin. Konfidenz für Auto-Vervollständigung 60% EnableTimeContextTageszeit berücksichtigen true
💧 Wasserverbrauchs-Tracking
Unterstützte Modelle
Das Tracking funktioniert automatisch für Modelle mit:
- Wassertank in der Basisstation
- Automatischer Mop-Waschfunktion
Wie es funktioniert
- Modellerkennung: Automatische Erkennung der Tankkapazität
- Verbrauchsmessung: Berechnet ml/m² während der Reinigung
- Lernende KI: Passt den Verbrauch an deine Gegebenheiten an
- Reinigungsmittel: Separates Tracking für Detergent
Verfügbare States
State Beschreibung water.CurrentAktueller Wasserstand (ml) water.PureWaterTankWasserstand in Prozent water.CurrentMlPerSqmAktueller Verbrauch (ml/m²) water.LearningStatsLernstatistiken water.RoomConsumptionVerbrauch pro Raum detergent.CurrentMlReinigungsmittel (ml) detergent.EstimatedRefillDateVoraussichtliches Nachfüll-Datum
🔍 Fehlerbehebung
Häufige Probleme
1. Verbindung zur Cloud schlägt fehl
Login error response: "invalid_grant"Lösung:
- Überprüfe Benutzername und Passwort
- Eventuell ist die Zwei-Faktor-Authentifizierung aktiviert
2. Karte wird nicht generiert
Error: Cannot find module 'canvas'Lösung: Canvas-Bibliothek manuell installieren:
cd /opt/iobroker npm install canvas3. Hoher Speicherverbrauch
Lösung:
- Aktiviere den Memory Cleaner in den Einstellungen
- Starte Node.js mit
--expose-gc - Reduziere das Aktualisierungsintervall
4. Alexa erkennt keine Befehle
Lösung:
- Stelle sicher, dass der Alexa-Adapter installiert ist
- Prüfe ob
alexa2.0.History.summaryexistiert - Bei Komponenten-Status/Reset: MUSS ein Robot-Keyword enthalten sein (z.B. "roboter", "saugroboter")
- Sage "Alexa, Hilfe für den Roboter" für Beispiele
Logging aktivieren
Setze den State
dreamehome.0.settings.showlogauftrue, um detaillierte Logs zu erhalten.
📝 Changelog
[2.0.0] - 2026-04-08
- Complete code rewrite | Komplett überarbeitete Codebasis
- New 3D map widget with interactive elements | Neues 3D-Karten-Widget mit interaktiven Elementen
- Learning system for personalized cleaning | Lernendes System für personalisierte Reinigung
- Water tracking with AI | Wasserverbrauchs-Tracking mit KI
- Support for Matrix models (mop types A/B/C) | Unterstützung für Matrix-Modelle (Mop-Typen A/B/C)
- Cleaning history system with obstacle detection, blocked rooms visualization, and date picker | Reinigungsverlauf-System mit Hinderniserkennung, blockierten Räumen und Datumsauswahl
- Improved voice control with synonym recognition | Verbesserte Sprachsteuerung mit Synonym-Erkennung
- Telegram integration | Telegram-Integration
- Resource monitoring with automatic restart | Ressourcen-Monitoring mit automatischem Restart
@wawyo
Wenn dein Adapter bei User funktiomiert - und so sieht es ja aus - lass ihn doch bitte in die Repositories aufnehmen.DANKE für deine Arbeit!
Für alle potenziellen User die sich NICHT als Tester sehen und den Adapter z.B. nur auf einem Testsystem ausprobieten wollen noch der nachfolgende Hinweis:
Von direkten Installation von GitHub - insbesondere auf produktiven Systemen - wird explizit abgeraten.
Dieser Hinweis betrifft natürli h NICHT das Testen einer neuen Release.
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@wawyo
Wenn dein Adapter bei User funktiomiert - und so sieht es ja aus - lass ihn doch bitte in die Repositories aufnehmen.DANKE für deine Arbeit!
Für alle potenziellen User die sich NICHT als Tester sehen und den Adapter z.B. nur auf einem Testsystem ausprobieten wollen noch der nachfolgende Hinweis:
Von direkten Installation von GitHub - insbesondere auf produktiven Systemen - wird explizit abgeraten.
Dieser Hinweis betrifft natürli h NICHT das Testen einer neuen Release.
@mcm1957 danke für das Feedback und das Interesse an einer Aufnahme in die Repositories!
Ich möchte zunächst noch genügend Rückmeldungen zur Kompatibilität mit verschiedenen Roboter-Modellen sammeln, bevor ich ihn offiziell einreiche. Ziel ist, dass er wirklich stabil und vollständig funktioniert.
Ein Punkt zur Performance:
Wie bei allen Saugroboter-Adaptern verursacht die Kartenverarbeitung (Map) bei Aktivierung höheren Ressourcenverbrauch – das ist systembedingt.
Daher habe ich ein eigenes Modul integriert, das:- Ressourcenverbrauch überwacht,
- ggf. Speicher automatisch bereinigt,
- und dir zeigt, wo genau die Auslastung entsteht, um gezielt optimieren zu können.
Hinweis zu den VIS Map-Einstellungen:
Einige Funktionen dort sind derzeit bewusst noch deaktiviert. Ich werde sie erst freischalten, wenn ausreichend Rückmeldungen und Tests von euch vorliegen – damit alles zuverlässig läuft.Ich selbst nutze den Adapter bereits im Alltag – und er tut, was er soll. 😊
Danke für euer Feedback – je mehr Rückmeldungen, desto besser kann ich den Adapter weiterentwickeln! -
@mcm1957 danke für das Feedback und das Interesse an einer Aufnahme in die Repositories!
Ich möchte zunächst noch genügend Rückmeldungen zur Kompatibilität mit verschiedenen Roboter-Modellen sammeln, bevor ich ihn offiziell einreiche. Ziel ist, dass er wirklich stabil und vollständig funktioniert.
Ein Punkt zur Performance:
Wie bei allen Saugroboter-Adaptern verursacht die Kartenverarbeitung (Map) bei Aktivierung höheren Ressourcenverbrauch – das ist systembedingt.
Daher habe ich ein eigenes Modul integriert, das:- Ressourcenverbrauch überwacht,
- ggf. Speicher automatisch bereinigt,
- und dir zeigt, wo genau die Auslastung entsteht, um gezielt optimieren zu können.
Hinweis zu den VIS Map-Einstellungen:
Einige Funktionen dort sind derzeit bewusst noch deaktiviert. Ich werde sie erst freischalten, wenn ausreichend Rückmeldungen und Tests von euch vorliegen – damit alles zuverlässig läuft.Ich selbst nutze den Adapter bereits im Alltag – und er tut, was er soll. 😊
Danke für euer Feedback – je mehr Rückmeldungen, desto besser kann ich den Adapter weiterentwickeln!@all noch ein technischer Hinweis zur Wasserverbrauchsanzeige in meinem Adapter:
Da Geräte wie der Dreame L20 Ultra (4,5 L Tank) keine echten Wasserverbrauchsdaten liefern, basiert die Anzeige in meinem Adapter nicht auf festen Werten oder Schätzungen, sondern auf einem selbstlernenden System.
Ich habe eine einfache, integrierte KI entwickelt, die:
bei jeder Reinigung Daten wie Fläche, Modus und Dauer sammelt
daraus Muster erkennt
und nach ca. 5 Reinigungen beginnt, den Verbrauch anhand realer Nutzung zu berechnen
Ziel ist keine perfekte Wissenschaft, sondern eine praxisnahe Einschätzung, die sich an das reale Verhalten des Roboters anpasst – und besser wird, je öfter er läuft.
Das System ist fest im Adapter integriert, läuft vollständig lokal, benötigt keine Cloud, und verbessert sich mit jeder Nutzung automatisch.
-
@wawyo
super Idee dieser Adapter. Danke!Ich habe zwei Dream-Sauger. Einer wird aber nur erkannt.
Der LS10 Pro steht in der App als Erster und wird erkannt.
Der L40S Pro Ultra wird nicht erkannt.Kann ICH da etwas machen, dass beide Sauger erkannt werden?
Lg. Erich
-
@mcm1957 danke für das Feedback und das Interesse an einer Aufnahme in die Repositories!
Ich möchte zunächst noch genügend Rückmeldungen zur Kompatibilität mit verschiedenen Roboter-Modellen sammeln, bevor ich ihn offiziell einreiche. Ziel ist, dass er wirklich stabil und vollständig funktioniert.
Ein Punkt zur Performance:
Wie bei allen Saugroboter-Adaptern verursacht die Kartenverarbeitung (Map) bei Aktivierung höheren Ressourcenverbrauch – das ist systembedingt.
Daher habe ich ein eigenes Modul integriert, das:- Ressourcenverbrauch überwacht,
- ggf. Speicher automatisch bereinigt,
- und dir zeigt, wo genau die Auslastung entsteht, um gezielt optimieren zu können.
Hinweis zu den VIS Map-Einstellungen:
Einige Funktionen dort sind derzeit bewusst noch deaktiviert. Ich werde sie erst freischalten, wenn ausreichend Rückmeldungen und Tests von euch vorliegen – damit alles zuverlässig läuft.Ich selbst nutze den Adapter bereits im Alltag – und er tut, was er soll. 😊
Danke für euer Feedback – je mehr Rückmeldungen, desto besser kann ich den Adapter weiterentwickeln!@wawyo said in Test DreameHome: 3D-Visualisierung und Alexa-Steuerung:
@mcm1957 danke für das Feedback und das Interesse an einer Aufnahme in die Repositories!
Ich möchte zunächst noch genügend Rückmeldungen zur Kompatibilität mit verschiedenen Roboter-Modellen sammeln, bevor ich ihn offiziell einreiche. Ziel ist, dass er wirklich stabil und vollständig funktioniert.
Ich selbst nutze den Adapter bereits im Alltag – und er tut, was er soll. 😊
Ohne irgendwie drängen zu wollen - die Entscheidung wann ein Adapter in Repo soll trifft natürlich der Dev. -- nur zur Sicherheit:
Es gibt wie wahrscheinlich bekannt ist ein LATEST / BETA und ein STABLE Repository. Wenn der Adapter prinzipiell funktioniert (und das tut er wenn ich es hier so lese) dann spricht zunächst mal nichts dagegen ihn ins BETA (LATEST) Repository aufnehmen zu lassen. Dort kann er dann in Ruhe von Testern erprobt werden ohne GitHub Installationen zu benutzen von denen prinzipiell abgeraten wird. Und es ist auch kein Problem, wenn ein Adapter im Beta Repo mal Fehler aufweist - dazu gibts ja des Beta Test Repository um diese im Zuge eines breiteren Einsatzes zu finden :-)
mcm1957
P.S.: Das notwendige Review für eine Aufnahme ins Latest dauert wahrscheinlich mindestens 1 bis 2 Wochen da leider immer zu wenig Zeit vorhanden ist. Aber wie gsagt - im Kern DEINE Entscheidung und DANKE für deine Arbeit.
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@wawyo said in Test DreameHome: 3D-Visualisierung und Alexa-Steuerung:
@mcm1957 danke für das Feedback und das Interesse an einer Aufnahme in die Repositories!
Ich möchte zunächst noch genügend Rückmeldungen zur Kompatibilität mit verschiedenen Roboter-Modellen sammeln, bevor ich ihn offiziell einreiche. Ziel ist, dass er wirklich stabil und vollständig funktioniert.
Ich selbst nutze den Adapter bereits im Alltag – und er tut, was er soll. 😊
Ohne irgendwie drängen zu wollen - die Entscheidung wann ein Adapter in Repo soll trifft natürlich der Dev. -- nur zur Sicherheit:
Es gibt wie wahrscheinlich bekannt ist ein LATEST / BETA und ein STABLE Repository. Wenn der Adapter prinzipiell funktioniert (und das tut er wenn ich es hier so lese) dann spricht zunächst mal nichts dagegen ihn ins BETA (LATEST) Repository aufnehmen zu lassen. Dort kann er dann in Ruhe von Testern erprobt werden ohne GitHub Installationen zu benutzen von denen prinzipiell abgeraten wird. Und es ist auch kein Problem, wenn ein Adapter im Beta Repo mal Fehler aufweist - dazu gibts ja des Beta Test Repository um diese im Zuge eines breiteren Einsatzes zu finden :-)
mcm1957
P.S.: Das notwendige Review für eine Aufnahme ins Latest dauert wahrscheinlich mindestens 1 bis 2 Wochen da leider immer zu wenig Zeit vorhanden ist. Aber wie gsagt - im Kern DEINE Entscheidung und DANKE für deine Arbeit.
@wawyo
Habe den Adapter auch entdeckt, und er funktioniert auch fast perfekt.
Dreame X50 Ultra Complete
Die Mops werden nicht in der Karte angezeigt (in den Datenpunkten sind sie vorhanden),
Reinigungsmittel habe ich in den Datenpunkten nicht finden können, wird daher auch als "NAN%" in der Map angezeigt.
Git Issue bereits eröffnet.
Im Gegensatz zu der Anleitung habe ich den Link in der Vis auf{dreamehome.0.XXXXXX.vis.vishtml0}(eine 0 statt 1 am Ende)
Aber ein super Plugin, vorallem die Kartendarstellung. -
@wawyo
Habe den Adapter auch entdeckt, und er funktioniert auch fast perfekt.
Dreame X50 Ultra Complete
Die Mops werden nicht in der Karte angezeigt (in den Datenpunkten sind sie vorhanden),
Reinigungsmittel habe ich in den Datenpunkten nicht finden können, wird daher auch als "NAN%" in der Map angezeigt.
Git Issue bereits eröffnet.
Im Gegensatz zu der Anleitung habe ich den Link in der Vis auf{dreamehome.0.XXXXXX.vis.vishtml0}(eine 0 statt 1 am Ende)
Aber ein super Plugin, vorallem die Kartendarstellung.Hallo @muckel
danke für das Feedback!
Derzeit ist es leider nur möglich, einen Roboter zu binden, aber ich plane, in Zukunft mehrere Roboter zu integrieren, sodass du auch beide Geräte gleichzeitig verwenden kannst.Danke für deine Geduld und dein Verständnis!
Hallo @mcm1957,
danke für den Hinweis und deine Geduld! Du hast völlig recht, dass es in der Beta-Phase keine Probleme gibt, Fehler zu finden und zu beheben.
Tatsächlich ist der Adapter in der jetzigen Form schon stabil und tut, was er soll. Ich wollte nur sicherstellen, dass er wirklich mit allen Geräten und Szenarien reibungslos funktioniert, bevor er offiziell eingereicht wird.
Ich denke, die Aufnahme ins Beta-Repository wäre ein guter Schritt, um ihn weiter zu testen und zu verfeinern, ohne dass zu viele Nutzer direkt betroffen sind. Der Vorschlag, das Ganze dort zu erproben, klingt sinnvoll.
Ich werde das Ganze dann entsprechend einplanen und die nächsten Schritte in die Wege leiten.Danke auch für das Verständnis und deine Unterstützung!
Hallo @Peter V.,
danke für dein Feedback und die ausführliche Beschreibung!
Es freut mich zu hören, dass der Adapter bei dir fast perfekt funktioniert. 😊
Nach der Überprüfung unter Issue 21 konnte ich feststellen, dass die Datenpunkte für MopPad und Detergent beim Dreame X50 offenbar nicht verfügbar sind, was auch in der App angezeigt wird. Diese Werte werden für das X50-Modell aktuell leider nicht bereitgestellt.Hier ist der relevante Log:
info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"18.2"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"19.1"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"19.2"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"20.1"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"20.2"}],"msg":".."}Wie man sehen kann, gibt die API bei den meisten Anfragen nur den "key" zurück (z. B. 18.1, 19.1), aber ohne den zugehörigen "value"-Wert, der für die Anzeige der Daten notwendig ist.
Falls Dreame in Zukunft diese Daten für das X50-Modell nicht bereitstellt, werde ich das Feature nachträglich hinzufügen, ähnlich wie es beim Wasser-Tracking funktioniert.
Vielen Dank für dein Verständnis und deine Geduld! ;)
-
Hallo @muckel
danke für das Feedback!
Derzeit ist es leider nur möglich, einen Roboter zu binden, aber ich plane, in Zukunft mehrere Roboter zu integrieren, sodass du auch beide Geräte gleichzeitig verwenden kannst.Danke für deine Geduld und dein Verständnis!
Hallo @mcm1957,
danke für den Hinweis und deine Geduld! Du hast völlig recht, dass es in der Beta-Phase keine Probleme gibt, Fehler zu finden und zu beheben.
Tatsächlich ist der Adapter in der jetzigen Form schon stabil und tut, was er soll. Ich wollte nur sicherstellen, dass er wirklich mit allen Geräten und Szenarien reibungslos funktioniert, bevor er offiziell eingereicht wird.
Ich denke, die Aufnahme ins Beta-Repository wäre ein guter Schritt, um ihn weiter zu testen und zu verfeinern, ohne dass zu viele Nutzer direkt betroffen sind. Der Vorschlag, das Ganze dort zu erproben, klingt sinnvoll.
Ich werde das Ganze dann entsprechend einplanen und die nächsten Schritte in die Wege leiten.Danke auch für das Verständnis und deine Unterstützung!
Hallo @Peter V.,
danke für dein Feedback und die ausführliche Beschreibung!
Es freut mich zu hören, dass der Adapter bei dir fast perfekt funktioniert. 😊
Nach der Überprüfung unter Issue 21 konnte ich feststellen, dass die Datenpunkte für MopPad und Detergent beim Dreame X50 offenbar nicht verfügbar sind, was auch in der App angezeigt wird. Diese Werte werden für das X50-Modell aktuell leider nicht bereitgestellt.Hier ist der relevante Log:
info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"18.2"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"19.1"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"19.2"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"20.1"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"20.2"}],"msg":".."}Wie man sehen kann, gibt die API bei den meisten Anfragen nur den "key" zurück (z. B. 18.1, 19.1), aber ohne den zugehörigen "value"-Wert, der für die Anzeige der Daten notwendig ist.
Falls Dreame in Zukunft diese Daten für das X50-Modell nicht bereitstellt, werde ich das Feature nachträglich hinzufügen, ähnlich wie es beim Wasser-Tracking funktioniert.
Vielen Dank für dein Verständnis und deine Geduld! ;)
-
Hallo @muckel
danke für das Feedback!
Derzeit ist es leider nur möglich, einen Roboter zu binden, aber ich plane, in Zukunft mehrere Roboter zu integrieren, sodass du auch beide Geräte gleichzeitig verwenden kannst.Danke für deine Geduld und dein Verständnis!
Hallo @mcm1957,
danke für den Hinweis und deine Geduld! Du hast völlig recht, dass es in der Beta-Phase keine Probleme gibt, Fehler zu finden und zu beheben.
Tatsächlich ist der Adapter in der jetzigen Form schon stabil und tut, was er soll. Ich wollte nur sicherstellen, dass er wirklich mit allen Geräten und Szenarien reibungslos funktioniert, bevor er offiziell eingereicht wird.
Ich denke, die Aufnahme ins Beta-Repository wäre ein guter Schritt, um ihn weiter zu testen und zu verfeinern, ohne dass zu viele Nutzer direkt betroffen sind. Der Vorschlag, das Ganze dort zu erproben, klingt sinnvoll.
Ich werde das Ganze dann entsprechend einplanen und die nächsten Schritte in die Wege leiten.Danke auch für das Verständnis und deine Unterstützung!
Hallo @Peter V.,
danke für dein Feedback und die ausführliche Beschreibung!
Es freut mich zu hören, dass der Adapter bei dir fast perfekt funktioniert. 😊
Nach der Überprüfung unter Issue 21 konnte ich feststellen, dass die Datenpunkte für MopPad und Detergent beim Dreame X50 offenbar nicht verfügbar sind, was auch in der App angezeigt wird. Diese Werte werden für das X50-Modell aktuell leider nicht bereitgestellt.Hier ist der relevante Log:
info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"18.2"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"19.1"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"19.2"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"20.1"}],"msg":".."} info: dreamehome.0 (2225745) https://eu.iot.dreame.tech:13267/dreame-user-iot/iotstatus/props response:{"code":0,"success":true,"data":[{"key":"20.2"}],"msg":".."}Wie man sehen kann, gibt die API bei den meisten Anfragen nur den "key" zurück (z. B. 18.1, 19.1), aber ohne den zugehörigen "value"-Wert, der für die Anzeige der Daten notwendig ist.
Falls Dreame in Zukunft diese Daten für das X50-Modell nicht bereitstellt, werde ich das Feature nachträglich hinzufügen, ähnlich wie es beim Wasser-Tracking funktioniert.
Vielen Dank für dein Verständnis und deine Geduld! ;)
@wawyo
Super, danke für deine Mühe.
Habe mal bei Dreame das als Feature-Request gemeldet.
Frage noch dazu, in VIS-2 (Visualisierung Next Generation) kann ich die Map einbinden, aber so richtig funktioniert das nicht.
In VIS funktiniert es.
Da ich haupsächlich Jarvis als VIS einsetze, habe ich jetzt per Iframe das VIS HTML eingebunden.
Gibt es eine Möglichkeit, das direkt als HTML auszulesen, also unabhängig von VIS, VIS-2, Jarvis?
Oder habe ich da einen Denkfehler? -
Danke für deine schnelle Antwort.
Wäre es als Zwischenschritt möglich eine 2. Instanz zu installieren und in den Instanzen den jeweiligen Sauger anzubinden?Liebe Grüße Erich
@muckel bitte teste dazu die Version 0.1.8 – ab dieser Version sollte es möglich sein, zwei Instanzen parallel zu betreiben und jeweils einem Sauger zuzuordnen.
Damit kannst du also als Zwischenschritt deine beiden Roboter separat anbinden.Freue mich über dein Feedback, ob das bei dir klappt! 😊

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register LoginSupport us
601
Online32.8k
Users82.7k
Topics1.3m
Posts