

Geekworm X1202 USV Variable in IObroker übernehmen

-
@oliverio
ich stehe auf dem schlauch ... gemacht habe ich nun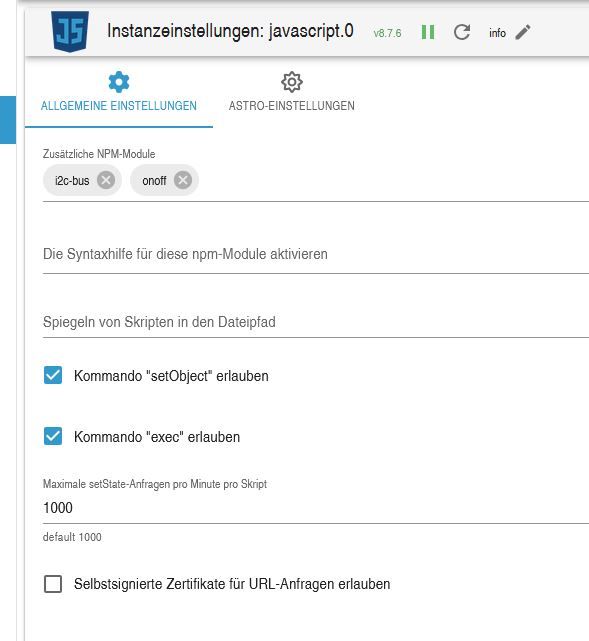
Variable erstellt

Minutliche ausführung
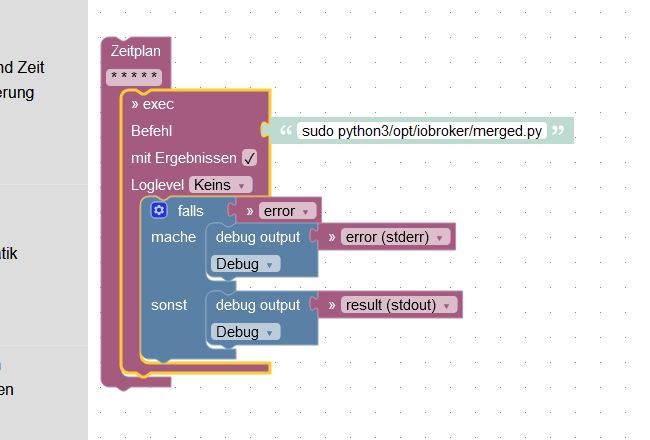
nu komme ich nicht weiter weil mein merged.py so aussieht.
wo soll ich deine Zeilen einfügen.#!/usr/bin/python3 import os import struct import smbus import time import logging import subprocess import gpiod from subprocess import call # User-configurable variables SHUTDOWN_THRESHOLD = 3 # Number of consecutive failures required for shutdown SLEEP_TIME = 60 # Time in seconds to wait between failure checks Loop = False def readVoltage(bus): read = bus.read_word_data(address, 2) swapped = struct.unpack("<H", struct.pack(">H", read))[0] voltage = swapped * 1.25 / 1000 / 16 return voltage def readCapacity(bus): read = bus.read_word_data(address, 4) swapped = struct.unpack("<H", struct.pack(">H", read))[0] capacity = swapped / 256 return capacity def get_battery_status(voltage): if 3.87 <= voltage <= 4.2: return "Full" elif 3.7 <= voltage < 3.87: return "High" elif 3.55 <= voltage < 3.7: return "Medium" elif 3.4 <= voltage < 3.55: return "Low" elif voltage < 3.4: return "Critical" else: return "Unknown" # Ensure only one instance of the script is running pid = str(os.getpid()) pidfile = "/run/X1200.pid" if os.path.isfile(pidfile): print("Script already running") exit(1) else: with open(pidfile, 'w') as f: f.write(pid) try: bus = smbus.SMBus(1) address = 0x36 PLD_PIN = 6 chip = gpiod.Chip('gpiochip4') pld_line = chip.get_line(PLD_PIN) pld_line.request(consumer="PLD", type=gpiod.LINE_REQ_DIR_IN) while True: failure_counter = 0 for _ in range(SHUTDOWN_THRESHOLD): ac_power_state = pld_line.get_value() voltage = readVoltage(bus) battery_status = get_battery_status(voltage) capacity = readCapacity(bus) print(f"Capacity: {capacity:.2f}% ({battery_status}), AC Power State: {'Plugged in' if ac_power_state == 1 else 'Unplugged'}, Voltage: {voltage:.2f}V") if capacity < 20: print("Battery level critical.") failure_counter += 1 elif voltage < 3.20: print("Battery voltage critical.") failure_counter += 1 elif ac_power_state == 0: print("UPS is unplugged or AC power loss detected.") failure_counter += 1 else: failure_counter = 0 break if failure_counter < SHUTDOWN_THRESHOLD: time.sleep(SLEEP_TIME) if failure_counter >= SHUTDOWN_THRESHOLD: shutdown_reason = "" if capacity < 20: shutdown_reason = "due to critical battery level." elif voltage < 3.20: shutdown_reason = "due to critical battery voltage." elif ac_power_state == 0: shutdown_reason = "due to AC power loss or UPS unplugged." shutdown_message = f"Critical condition met {shutdown_reason} Initiating shutdown." print(shutdown_message) call("sudo nohup shutdown -h now", shell=True) else: #print("System operating within normal parameters. No action required.") if Loop: time.sleep(SLEEP_TIME) else: exit(0) finally: if os.path.isfile(pidfile): os.unlink(pidfile) exit(0) -
@lieggie sagte: wo soll ich deine Zeilen einfügen.
Damit es ohne sudo laufen kann, kommentiere die Zeilen 44 bis 51 und 106, 107 aus und teste es erst einmal auf der Konsole (ohne sudo).
python3 /opt/iobroker/merged.py@paul53 said in Geekworm X1202 USV Variable in IObroker übernehmen:
python3 /opt/iobroker/merged.py
Ich bekomme nun den String angezeigt
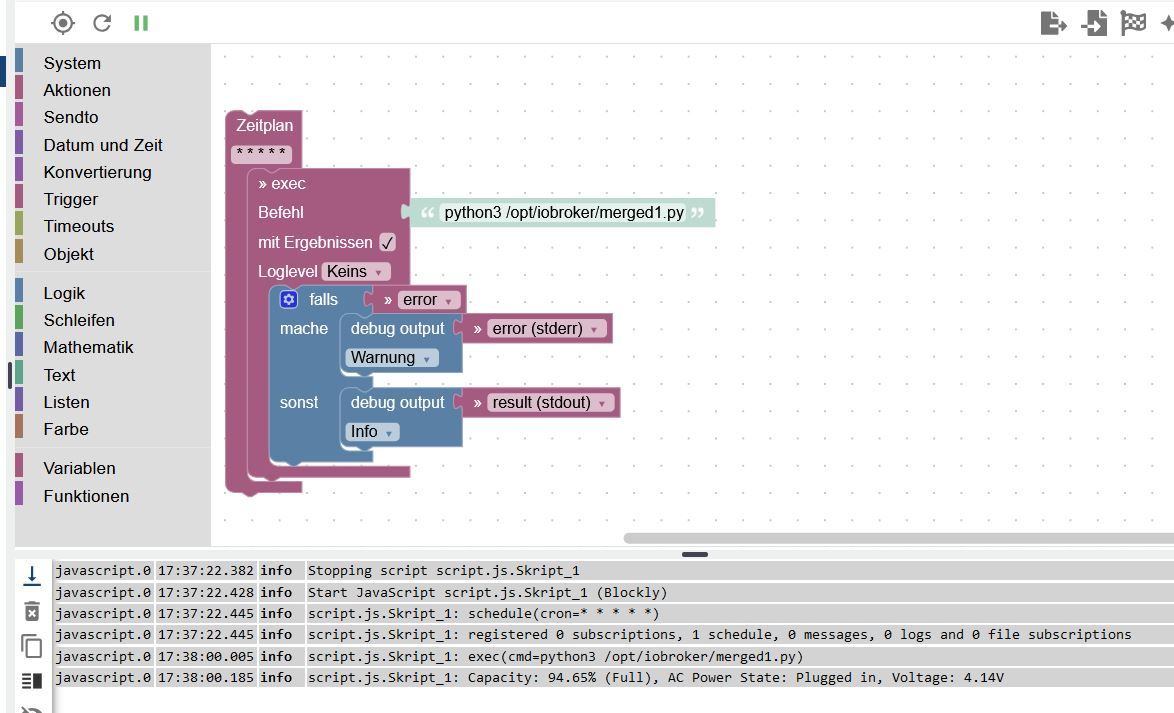
nun kann ich mich an das zerlegen machen . Vielen Dank.
Magst du mir erklären was wir dort nun genau rausgenommen haben ?
-
@paul53 said in Geekworm X1202 USV Variable in IObroker übernehmen:
python3 /opt/iobroker/merged.py
Ich bekomme nun den String angezeigt
nun kann ich mich an das zerlegen machen . Vielen Dank.
Magst du mir erklären was wir dort nun genau rausgenommen haben ?
@lieggie sagte: Magst du mir erklären was wir dort nun genau rausgenommen haben ?
Die Prüfung über eine pid-Datei, ob das Skript schon läuft, wurde raus genommen. Das Skript wird nur jede Minute gestartet und sollte sich vorher selbst beenden mit
Loop = False -
@lieggie sagte: Magst du mir erklären was wir dort nun genau rausgenommen haben ?
Die Prüfung über eine pid-Datei, ob das Skript schon läuft, wurde raus genommen. Das Skript wird nur jede Minute gestartet und sollte sich vorher selbst beenden mit
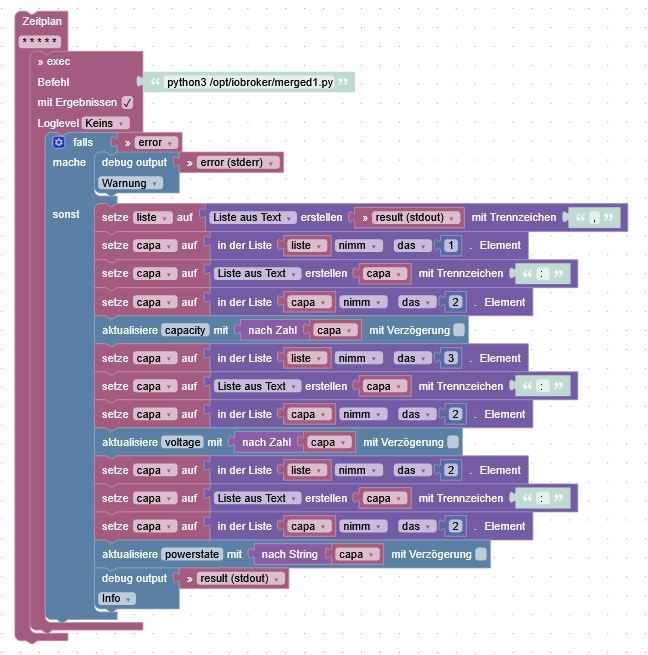
Loop = False@paul53 danke an alle die geholfen haben, nun läuft alles
anbei noch mal das Blockly
und das merged Skript ohne die Zeilen 44 bis 51 und 106, 107
co#!/usr/bin/python3 import os import struct import smbus import time import logging import subprocess import gpiod from subprocess import call # User-configurable variables SHUTDOWN_THRESHOLD = 3 # Number of consecutive failures required for shutdown SLEEP_TIME = 60 # Time in seconds to wait between failure checks Loop = False def readVoltage(bus): read = bus.read_word_data(address, 2) swapped = struct.unpack("<H", struct.pack(">H", read))[0] voltage = swapped * 1.25 / 1000 / 16 return voltage def readCapacity(bus): read = bus.read_word_data(address, 4) swapped = struct.unpack("<H", struct.pack(">H", read))[0] capacity = swapped / 256 return capacity def get_battery_status(voltage): if 3.87 <= voltage <= 4.2: return "Full" elif 3.7 <= voltage < 3.87: return "High" elif 3.55 <= voltage < 3.7: return "Medium" elif 3.4 <= voltage < 3.55: return "Low" elif voltage < 3.4: return "Critical" else: return "Unknown" # Ensure only one instance of the script is running try: bus = smbus.SMBus(1) address = 0x36 PLD_PIN = 6 chip = gpiod.Chip('gpiochip4') pld_line = chip.get_line(PLD_PIN) pld_line.request(consumer="PLD", type=gpiod.LINE_REQ_DIR_IN) while True: failure_counter = 0 for _ in range(SHUTDOWN_THRESHOLD): ac_power_state = pld_line.get_value() voltage = readVoltage(bus) battery_status = get_battery_status(voltage) capacity = readCapacity(bus) print(f"Capacity: {capacity:.2f}% ({battery_status}), AC Power State: {'Plugged in' if ac_power_state == 1 else 'Unplugged'}, Voltage: {voltage:.2f}V") if capacity < 20: print("Battery level critical.") failure_counter += 1 elif voltage < 3.20: print("Battery voltage critical.") failure_counter += 1 elif ac_power_state == 0: print("UPS is unplugged or AC power loss detected.") failure_counter += 1 else: failure_counter = 0 break if failure_counter < SHUTDOWN_THRESHOLD: time.sleep(SLEEP_TIME) if failure_counter >= SHUTDOWN_THRESHOLD: shutdown_reason = "" if capacity < 20: shutdown_reason = "due to critical battery level." elif voltage < 3.20: shutdown_reason = "due to critical battery voltage." elif ac_power_state == 0: shutdown_reason = "due to AC power loss or UPS unplugged." shutdown_message = f"Critical condition met {shutdown_reason} Initiating shutdown." print(shutdown_message) call("sudo nohup shutdown -h now", shell=True) else: #print("System operating within normal parameters. No action required.") if Loop: time.sleep(SLEEP_TIME) else: exit(0) finally: exit(0)de_text -
ich versuche grad 2 gleisig zu fahren....ich komme weder mit blockly noch mit deinem Script weiter.
Aus deine script bekomme ich diesen fehler
javascript.0 14:59:52.402 info Start JavaScript script.js.USV (Javascript/js) javascript.0 14:59:52.417 error script.js.USV: Error: EINVAL: invalid argument, write javascript.0 14:59:52.417 error at script.js.USV:26:18 javascript.0 14:59:52.417 error at script.js.USV:169:3komme damit auch nicht weiter
@lieggie sagte in Geekworm X1202 USV Variable in IObroker übernehmen:
ich versuche grad 2 gleisig zu fahren....ich komme weder mit blockly noch mit deinem Script weiter.
hier mal noch was ich dir per PM geantwortet habe für alle
wahrscheinlich das was thomas geschrieben hat, das seit der letzten betriebssystem version die bisherige methode zur kommunikation mit gpio nicht mehr funktioniert. man müsste dann opengpio nehmen, das berücksichtigt die neuesten änderungen. wahrscheinlich wäre es einfach, aber es kann auch ein wenig testen und rumprobieren bedeuten.
da du geschrieben hast, das das mit skript nix für dich ist, verfolge erst einmal mit den anderen den python weg.
wenn da wirklich gar nix geht, dann können wir mal schauen. für doppelt-entwicklung ist die zeit aktuell nicht daso wie es aussieht habt ihr ja den python weg auch hinbekommen
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
431
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge