NEWS


IRobot Roomba Adapter
-
Hi,
Ich habe den Roomba Adapter in Betrieb nehmen können.
Mit den dort angebotenen Datenpunkten kann ich meinen iRobot starten, stoppen und zum Dock zurück schicken.
Allerdings würde ich gerne auch die Preferencen steuern, um zum Beispiel die Kantenreinigung zu aktivieren.
Es funktioniert abernur in eine Richtung. Die Einstellungen werden im ioBroker angezeigt. Ich kann diese allerdings nicht vom iOBroker aus ändern.
Oder gibt es da ne Möglichkeit?Viele Grüße
Uwe -
So, neues Log, neues Glück:
Keine Fehler, schien alles normal durchzulaufen. Auch die Karte per Telegram zeigte gut die Abdeckung. Allerdings zwei Anmerkungen/Besonderheiten:
- Bei mir ist der Status docked nach wie vor invertiert.
- Mein Roomba macht täglich zwei Durchläufe (in der App ist da automatisch eingestellt). Er fährt seine Runde, irgendwann ist der Akku leer (so nach ziemlich genau 75min, also gegen 12:20 Uhr), er fährt dann zum Laden und da bekomme ich von iobroker dann die Karte und Fertigmeldung. Nach wiederrum 75 min fährt er ein zweites Mal seine Runde für ca eine Stunde und davon ist im Log nirgendwo was zu sehen.
In der App (die ich heute noch gar nicht bemüht habe, da Internet des Roomba eh aus), hat er das immer sauber angezeigt, also saugt gerade, ist zum Aufladen an der Station und fährt in ca. soundsoviel Minuten wieder los, bzw. ist unterwegs oder eben, ist für heute fertig.
Warum bekommt der Adapter vom zweiten Lauf nix mit, nichtmal, dass der Status docking (wenn auch falsch rum) sich eigentlich ändern müsste? Nach dem letzten Eintrag um 12:21 war nix mehr von roomba im Log, obwohl er nochmal unterwegs war.
Gruss, Jürgen
P.S.: Musste vom Log alle langen Blöcke bis auf einen löschen, da sonst Zeichenlimit pro Beitrag überschritten. Schienen aber alle ähnlich oder gleich.
-
Sorry, aber ich bin wieder weg vom Adapter und lasse es über die Irobot-App laufen. Via iobroker kamen leider nie Infos, wenn er sich mal festgefahren hatte. Auch kam ausser Behälter voll über iobroker asnsonsten nichts Brauchbares an. Zudem waren die Karten oft nur Bruchteile der tatsächlichen Strecke. Dass es nicht am roomba selbst liegt sehe ich daran, dass via App alles ankommt und auch die Karten immer den vollen gereinigten Bereich anzeigen. Und da ich über iobroker so keinen richtigen Nutzen außer "es geht" hatte, bin ich wieder zurück. :blush:
Als ich ihn bis vor ca. 2 Wochen noch laufen hatte war der Zustand allerdings meistens (zu 90%) invertiert, aber nicht immer. Eine Logik konnte ich da leider nicht feststellen.
Gruss, Jürgen -
-
@Zefau Ich habe seit Montag den iRobot 966. Das einrichten des Adapters ging ohne Probleme. Der Robi reagiert auf die Kommandos des Adapter und scheint die richtigen Daten zu liefern.
Einige Kleinigkeiten habe ich aber:
- Wie im Issue 28 beschrieben scheint der Status für docked "verdreht" zu sein.
EDIT: Scheinbar ist der Status IMMER auf true! - Bei der Anzeige der letzten Kommandos erscheint bei dateTime nur NaN (siebe Bild)

Soll ich dazu ein Issue erstellen? - Ist es irgendwie möglich das der Zeitplan der Reinigung anpassbar ist oder gibt das die API nicht her?
LG
Carsten - Wie im Issue 28 beschrieben scheint der Status für docked "verdreht" zu sein.
-
@Zefau Ich habe seit Montag den iRobot 966. Das einrichten des Adapters ging ohne Probleme. Der Robi reagiert auf die Kommandos des Adapter und scheint die richtigen Daten zu liefern.
Einige Kleinigkeiten habe ich aber:
- Wie im Issue 28 beschrieben scheint der Status für docked "verdreht" zu sein.
EDIT: Scheinbar ist der Status IMMER auf true! - Bei der Anzeige der letzten Kommandos erscheint bei dateTime nur NaN (siebe Bild)
Soll ich dazu ein Issue erstellen? - Ist es irgendwie möglich das der Zeitplan der Reinigung anpassbar ist oder gibt das die API nicht her?
LG
Carsten@CKMartens danke dir für das Feedback. Werde das bei Zeit im Adapter berücksichtigen.
- Wie im Issue 28 beschrieben scheint der Status für docked "verdreht" zu sein.
-
Hallo Zusammen
hat einer von euch eine Idee warum ich keinen Benutzernamen angezeigt bekomme?
dorita980@3.1.4 getpassword /root/dorita980
node ./bin/getpassword.js "192.168.xx.xx"Make sure your robot is on the Home Base and powered on (green lights on). Then press and >hold the HOME button on your robot until it plays a series of tones (about 2 seconds). >Release the button and your robot will flash WIFI light.
Then press any key here...
Robot Data:
undefined
(node:22125) [DEP0005] DeprecationWarning: Buffer() is deprecated due to security and >usability issues. Please use the Buffer.alloc(), Buffer.allocUnsafe(), or Buffer.from() methods >instead.
Password=> :1:1575147289:IcCUkxxxxxxxxxxxx <= Yes, all this string.
Use this credentials in dorita980 lib : )
root@iobroker:~/dorita980# dorita980.getRobotIP()
exit
-bash: syntax error near unexpected token `exit'
root@iobroker:~/dorita980#Das Benutzername und Passwort über den Adapter zu holen schlägt fehl. Ich bekomme die gleiche Meldung wie Mappy
Infos zum Roomba
Typ: i7+ (i7558)
SW: 3.0.11Gruß André
-
Hallo Zusammen
hat einer von euch eine Idee warum ich keinen Benutzernamen angezeigt bekomme?
dorita980@3.1.4 getpassword /root/dorita980
node ./bin/getpassword.js "192.168.xx.xx"Make sure your robot is on the Home Base and powered on (green lights on). Then press and >hold the HOME button on your robot until it plays a series of tones (about 2 seconds). >Release the button and your robot will flash WIFI light.
Then press any key here...
Robot Data:
undefined
(node:22125) [DEP0005] DeprecationWarning: Buffer() is deprecated due to security and >usability issues. Please use the Buffer.alloc(), Buffer.allocUnsafe(), or Buffer.from() methods >instead.
Password=> :1:1575147289:IcCUkxxxxxxxxxxxx <= Yes, all this string.
Use this credentials in dorita980 lib : )
root@iobroker:~/dorita980# dorita980.getRobotIP()
exit
-bash: syntax error near unexpected token `exit'
root@iobroker:~/dorita980#Das Benutzername und Passwort über den Adapter zu holen schlägt fehl. Ich bekomme die gleiche Meldung wie Mappy
Infos zum Roomba
Typ: i7+ (i7558)
SW: 3.0.11Gruß André
-
Guten Morgen,
@Zefau folgendes wird geloggt.
2019-12-03 08:33:33.431 - info: host.iobroker stopInstance system.adapter.roomba.0 (force=false, process=true)
2019-12-03 08:33:33.433 - info: host.iobroker stopInstance system.adapter.roomba.0 send kill signal
2019-12-03 08:33:33.434 - info: roomba.0 (18417) Got terminate signal TERMINATE_YOURSELF
2019-12-03 08:33:33.437 - info: roomba.0 (18417) Adapter stopped und unloaded.
2019-12-03 08:33:33.438 - info: roomba.0 (18417) terminating
2019-12-03 08:33:33.439 - info: roomba.0 (18417) Terminated (START_IMMEDIATELY_AFTER_STOP): Without reason
2019-12-03 08:33:33.962 - info: host.iobroker instance system.adapter.roomba.0 terminated with code 156 (156)
2019-12-03 08:33:35.952 - info: host.iobroker instance system.adapter.roomba.0 started with pid 18479
2019-12-03 08:33:37.916 - info: roomba.0 (18479) starting. Version 1.0.7 in /opt/iobroker/node_modules/iobroker.roomba, node: v10.17.0
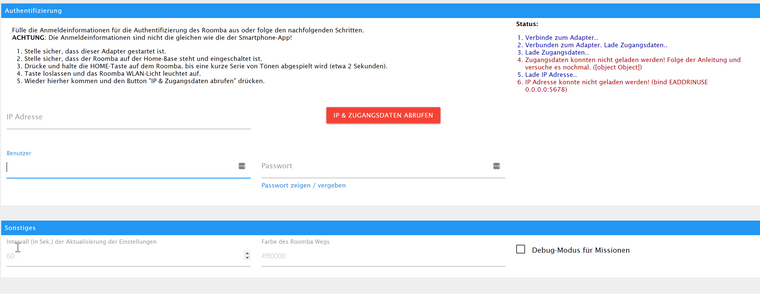
2019-12-03 08:33:37.965 - warn: roomba.0 (18479) Username, password and / or ip address missing!
2019-12-03 10:42:00.221 - debug: roomba.0 (30673) system.adapter.admin.0: logging false
2019-12-03 10:42:01.198 - debug: roomba.0 (30673) Message: {"command":"getRobotData","message":null,"from":"system.adapter.admin.0","callback":{"message":null,"id":10,"ack":false,"time":1575366121196},"_id":63979261}
2019-12-03 10:42:01.200 - debug: roomba.0 (30673) Retrieved robot data: {"result":false,"error":{"errno":"EADDRINUSE","code":"EADDRINUSE","syscall":"bind","address":"0.0.0.0","port":5678}}
2019-12-03 10:42:01.201 - debug: roomba.0 (30673) sendTo "getRobotData" to system.adapter.admin.0 from system.adapter.roomba.0
2019-12-03 10:42:01.213 - debug: roomba.0 (30673) Message: {"command":"getIp","message":null,"from":"system.adapter.admin.0","callback":{"message":null,"id":11,"ack":false,"time":1575366121212},"_id":63979262}
2019-12-03 10:42:01.214 - debug: roomba.0 (30673) Retrieved IP address: undefined
2019-12-03 10:42:01.215 - debug: roomba.0 (30673) sendTo "getIp" to system.adapter.admin.0 from system.adapter.roomba.0
2019-12-03 10:42:06.421 - debug: roomba.0 (30673) system.adapter.admin.0: logging true
Was mich wundert, wenn ich versuche die Zugangsdaten über "get-roomba-password xx.xx.x." zu bekommen erhält er keine Daten zum Roomba z.B. Username. Wie oben Dokumentiert erhalte ich wohl aber ein Passwort.
get-roomba-password 192.168.xxx.xx
Make sure your robot is on the Home Base and powered on (green lights on). Then press and hold the HOME button on your robot until it plays a series of tones (about 2 seconds). Release the button and your robot will flash WIFI light.
Then press any key here...
Robot Data:
undefined
Password=> :1:1575147289:IcCUxxxxxxxxxxxx <= Yes, all this string.
Use this credentials in dorita980 lib : ) -
also... ich musste eben wegen einem routerwechsel ebenfalls denn roomba neu einlesen, gab die gleichen probleme wie ihr... habe denn fehler selbst gefunden vllt hilft es euch...
ihr musst jasudo npm install canvas --unsafe-perm=true
installierenda ist ein error aufgetaucht
npm ERR! enoent ENOENT: no such file or directory, open '/home/pi/package.json'dort hieß die datei aber package_lock.json
iobroker legt eure daten aber im
/opt/iobroker
abdort habe ich die datei package.json kopiert und sie in
home/pi/
eingefügtich vermute das umbennen der datei würde auch gehen wollte es aber nicht riskieren...
danach hat der adapter alle daten sauber eingelesen -
@jonny-007 @derandre habt ihr die Möglichkeit eine Datei anzupassen?
Die Datei
getpassword.js(müsste zu finden sein in/opt/iobroker/node_modules/dorita980/bin/).
Dort nach Zeile 86 (als neue Zeile 87 und 88) folgendes zum Fehler-tracing einfügen:console.log(JSON.stringify(e)); console.log(e.message);also
discovery.getRobotPublicInfo(host, function (e, robotData) { console.log(JSON.stringify(e)); console.log(e.message); console.log('Robot Data:'); console.log(robotData); });Und dann bitte nochmal die Ausgabe auf der Konsole posten, wenn ihr
get-roomba-password 192.168.xxx.xxim Ordner/opt/iobroker/node_modules/dorita980/ausführt. -
-
@Zefau
Leider bringt das keine Anderung die Ausgabe bleibt die gleiche somit bekomme ich nach wie vor keine Userdaten.
Ich habe schon viel gesehen aber das ein Device seine User nicht raus gibt aber das Passwort hatte ich so noch nicht. -
@Zefau
Wenn ich über die GUI den Roomba versuche zu verbinden steht folgendes im Log.2019-12-05 21:27:39.231 - debug: roomba.0 (14393) Message: {"command":"getRobotData","message":null,"from":"system.adapter.admin.0","callback":{"message":null,"id":108,"ack":false,"time":1575577659229},"_id":63979359}
2019-12-05 21:27:39.232 - debug: roomba.0 (14393) Retrieved robot data: {"result":false,"error":{"errno":"EADDRINUSE","code":"EADDRINUSE","syscall":"bind","address":"0.0.0.0","port":5678}}
2019-12-05 21:27:39.233 - debug: roomba.0 (14393) sendTo "getRobotData" to system.adapter.admin.0 from system.adapter.roomba.0
2019-12-05 21:27:39.328 - debug: roomba.0 (14393) Message: {"command":"getIp","message":null,"from":"system.adapter.admin.0","callback":{"message":null,"id":109,"ack":false,"time":1575577659326},"_id":63979360}
2019-12-05 21:27:39.329 - debug: roomba.0 (14393) Retrieved IP address: undefined
2019-12-05 21:27:39.330 - debug: roomba.0 (14393) sendTo "getIp" to system.adapter.admin.0 from system.adapter.roomba.0
Wenn ich übers Terminal gehe , get-roomba-password 192.168.1xx.xx erhalte ich folgendes.
Make sure your robot is on the Home Base and powered on (green lights on). Then press and hold the HOME button on your robot until it plays a series of tones (about 2 seconds). Release the button and your robot will flash WIFI light.
Then press any key here...
Robot Data:
undefined
Password=> :1:1575147289:IcCUkExxxxxxxxx <= Yes, all this string.
Use this credentials in dorita980 lib : )
Gibt es eventuell noch ein Log was ich übersehen habe?
Wenn ich übers Terminal die Verbinung aufnehme quitiert der Roomba dies mit der Ansage, dass er jetzt fertig eingerichtet ist und Einsatzbereit ist.
-
Nachdem nun auch ein M6 bei uns wischt, habe ich mir den Adapter installiert und mit den Infos, welche das Passwort-Skript liefert, auch grün bekommen. Auch sehr viele Datenpunkte werden gefüllt - vielen Dank für die Arbeit!
Allerdings konnte ich danach nicht mehr mit der iRobot App auf den M6 zugreifen, sondern wurde aufgefordert ihn neu zu verbinden - was auch ging, aber nun kann der Adapter nicht mehr zugreifen. Werden da unterschiedliche User generiert und es kann immer nur einen geben? Wegen WAF ist zurzeit natürlich die App aktiv. Als unverbesserliches Spielkind hätte ich aber gerne beides. Mache ich einfach nur etwas falsch, oder haben diesen Effekt auch andere?
-
Hallo Zusammen
hat einer von euch eine Idee warum ich keinen Benutzernamen angezeigt bekomme?
dorita980@3.1.4 getpassword /root/dorita980
node ./bin/getpassword.js "192.168.xx.xx"Make sure your robot is on the Home Base and powered on (green lights on). Then press and >hold the HOME button on your robot until it plays a series of tones (about 2 seconds). >Release the button and your robot will flash WIFI light.
Then press any key here...
Robot Data:
undefined
(node:22125) [DEP0005] DeprecationWarning: Buffer() is deprecated due to security and >usability issues. Please use the Buffer.alloc(), Buffer.allocUnsafe(), or Buffer.from() methods >instead.
Password=> :1:1575147289:IcCUkxxxxxxxxxxxx <= Yes, all this string.
Use this credentials in dorita980 lib : )
root@iobroker:~/dorita980# dorita980.getRobotIP()
exit
-bash: syntax error near unexpected token `exit'
root@iobroker:~/dorita980#Das Benutzername und Passwort über den Adapter zu holen schlägt fehl. Ich bekomme die gleiche Meldung wie Mappy
Infos zum Roomba
Typ: i7+ (i7558)
SW: 3.0.11Gruß André
-
also... ich musste eben wegen einem routerwechsel ebenfalls denn roomba neu einlesen, gab die gleichen probleme wie ihr... habe denn fehler selbst gefunden vllt hilft es euch...
ihr musst jasudo npm install canvas --unsafe-perm=true
installierenda ist ein error aufgetaucht
npm ERR! enoent ENOENT: no such file or directory, open '/home/pi/package.json'dort hieß die datei aber package_lock.json
iobroker legt eure daten aber im
/opt/iobroker
abdort habe ich die datei package.json kopiert und sie in
home/pi/
eingefügtich vermute das umbennen der datei würde auch gehen wollte es aber nicht riskieren...
danach hat der adapter alle daten sauber eingelesen -
Nachdem ich es Anfang Januar ja nicht geschafft hatte, den Roomba Adapter parallel zur iRobot Handy App zu betreiben (wenn ich den Adapter verbunden hatte, hatte die App dafür die Verbindung verloren), habe ich mich heute noch mal rangemacht und es erneut versucht. Die Schaltfläche "Zugangsdaten abrufen" in der Instanz funktioniert zwar nach wie vor nicht, aber mithilfe des dorita980 Befehls "npm run getpassword" habe ich den User und das Passwort bekommen und in die Instanz eingetragen. Und was soll ich sagen, diesmal hat es funktioniert, ohne dass die Handy Apps ihre Verbindung verloren haben - keine Ahnung was diesmal anders war.
Was ich damit eigentlich sage will: also auch der iRobot Braava Jet M6 ist mit diesem Adapter kompatibel :+1:
835
Online32.4k
Users81.5k
Topics1.3m
Posts