

Zeigt her eure Views zum Thema Mähroboter
-
Vermutlich werde ich das mit nem BWM oder Fenster/Türkontakt lösen.
Ist zwar nen übles Gefrickel wieder , aber das muss zuverlässig laufen. Sonst brauche ich so nen Gerät nicht 😜Ja das stimmt. Vielleicht bekommt der Lucky das ja auch wieder so hin wie früher 🤗
-
OK schade. Warum wurde das denn überhaupt geändert? Und warum 8min.? Hast du das so eingestellt oder war WORX das selber und wenn ja was ist der Grund dafür?
@haselchen Ist dir mittlerweile eine Lösung für das Problem eingefallen, da wir ja beide scheinbar ne Garage mit Rollator haben die geschlossen werden soll, sobald der WORX in der Garage steht.
@sushibomba sagte in Zeigt her eure Views zum Thema Mähroboter:
OK schade. Warum wurde das denn überhaupt geändert? Und warum 8min.? Hast du das so eingestellt oder war WORX das selber und wenn ja was ist der Grund dafür? -> ????? Das sind die Datenpunkte .areas.area_x und startSequence mit dem ich ja mein Problem hab. Die 8 sind 8m die erste Zone.
@haselchen Ist dir mittlerweile eine Lösung für das Problem eingefallen, da wir ja beide scheinbar ne Garage mit Rollator haben die geschlossen werden soll, sobald der WORX in der Garage steht. -> Wieso habt ihr denn diese Probleme. Eigentlich werden die Daten bei Ankunft von Worx sofort gesendet. Wahrscheinlich verwendet ihr einen Trigger falsch.
Gruß//Lucky
-
@sushibomba sagte in Zeigt her eure Views zum Thema Mähroboter:
OK schade. Warum wurde das denn überhaupt geändert? Und warum 8min.? Hast du das so eingestellt oder war WORX das selber und wenn ja was ist der Grund dafür? -> ????? Das sind die Datenpunkte .areas.area_x und startSequence mit dem ich ja mein Problem hab. Die 8 sind 8m die erste Zone.
@haselchen Ist dir mittlerweile eine Lösung für das Problem eingefallen, da wir ja beide scheinbar ne Garage mit Rollator haben die geschlossen werden soll, sobald der WORX in der Garage steht. -> Wieso habt ihr denn diese Probleme. Eigentlich werden die Daten bei Ankunft von Worx sofort gesendet. Wahrscheinlich verwendet ihr einen Trigger falsch.
Gruß//Lucky
@lucky_esa sagte in Zeigt her eure Views zum Thema Mähroboter:
@sushibomba sagte in Zeigt her eure Views zum Thema Mähroboter:
OK schade. Warum wurde das denn überhaupt geändert? Und warum 8min.? Hast du das so eingestellt oder war WORX das selber und wenn ja was ist der Grund dafür? -> ????? Das sind die Datenpunkte .areas.area_x und startSequence mit dem ich ja mein Problem hab. Die 8 sind 8m die erste Zone.
Nein da hast du mich falsch verstanden. Genauso wie bei @haselchen ist es bei mir so, dass wenn der Landroid zurück fährt nachdem er seine Aufgabe erledigt hat, kommt er ja irgendwann in der Station an.
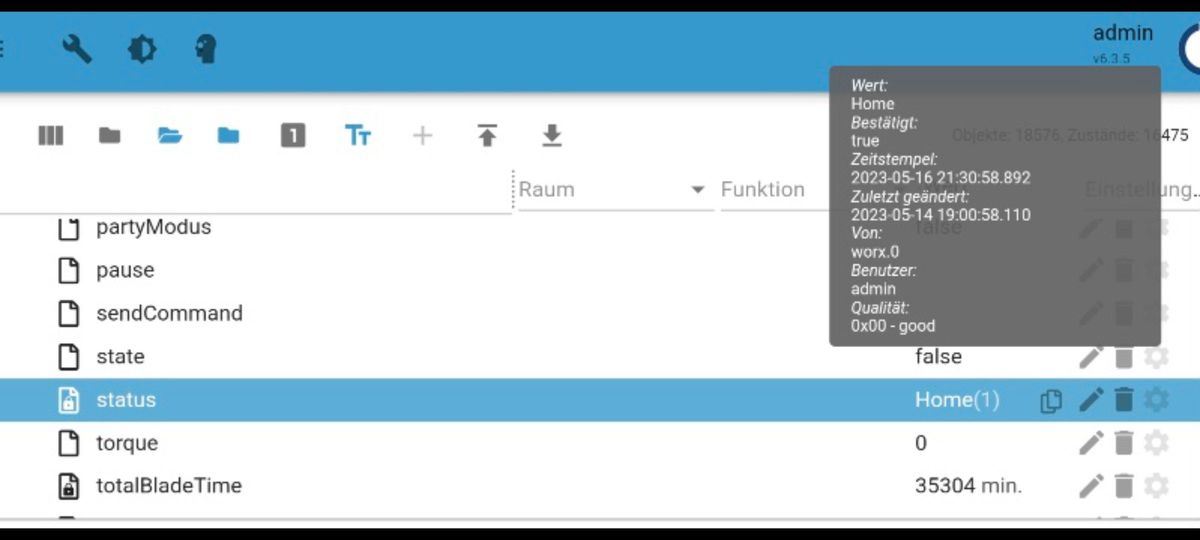
Jetzt seit den neusten Blockly's oder woran auch immer es liegt, wird nicht mehr der Datenpunkt "mower_status" direkt aktualisiert sobald er die Ladekontakte berührt. Dies geschieht leider erst 8min. später das er in den Status "Home (1)" wechselt.
Das ist in sofern suboptimal, da ich vorher den Status "Home(1)" vom "mower_status" als Trigger genommen habe in einem anderen Blockly und die Garagentore der WORX Garage runter zu fahren. Durch die Änderung passiert das dann also leider erst 8 Minuten später.Nochmal anders formuliert, wenn in der WORX App steht "Ausgangsposition 18:52h" als Beispiel, dann zeigt "mover_status" erst um 19:00h genau den Status "Home (1)" an.
@haselchen Ist dir mittlerweile eine Lösung für das Problem eingefallen, da wir ja beide scheinbar ne Garage mit Rollator haben die geschlossen werden soll, sobald der WORX in der Garage steht. -> Wieso habt ihr denn diese Probleme. Eigentlich werden die Daten bei Ankunft von Worx sofort gesendet. Wahrscheinlich verwendet ihr einen Trigger falsch.
Gruß//Lucky
Welchen Trigger sollen wir denn deiner Meinung für das stehen an den Ladekontakten verwenden außer "mover_status"?
-
@lucky_esa sagte in Zeigt her eure Views zum Thema Mähroboter:
@sushibomba sagte in Zeigt her eure Views zum Thema Mähroboter:
OK schade. Warum wurde das denn überhaupt geändert? Und warum 8min.? Hast du das so eingestellt oder war WORX das selber und wenn ja was ist der Grund dafür? -> ????? Das sind die Datenpunkte .areas.area_x und startSequence mit dem ich ja mein Problem hab. Die 8 sind 8m die erste Zone.
Nein da hast du mich falsch verstanden. Genauso wie bei @haselchen ist es bei mir so, dass wenn der Landroid zurück fährt nachdem er seine Aufgabe erledigt hat, kommt er ja irgendwann in der Station an.
Jetzt seit den neusten Blockly's oder woran auch immer es liegt, wird nicht mehr der Datenpunkt "mower_status" direkt aktualisiert sobald er die Ladekontakte berührt. Dies geschieht leider erst 8min. später das er in den Status "Home (1)" wechselt.
Das ist in sofern suboptimal, da ich vorher den Status "Home(1)" vom "mower_status" als Trigger genommen habe in einem anderen Blockly und die Garagentore der WORX Garage runter zu fahren. Durch die Änderung passiert das dann also leider erst 8 Minuten später.Nochmal anders formuliert, wenn in der WORX App steht "Ausgangsposition 18:52h" als Beispiel, dann zeigt "mover_status" erst um 19:00h genau den Status "Home (1)" an.
@haselchen Ist dir mittlerweile eine Lösung für das Problem eingefallen, da wir ja beide scheinbar ne Garage mit Rollator haben die geschlossen werden soll, sobald der WORX in der Garage steht. -> Wieso habt ihr denn diese Probleme. Eigentlich werden die Daten bei Ankunft von Worx sofort gesendet. Wahrscheinlich verwendet ihr einen Trigger falsch.
Gruß//Lucky
Welchen Trigger sollen wir denn deiner Meinung für das stehen an den Ladekontakten verwenden außer "mover_status"?
Besser hätte ich es auch nicht erklären können 😁
-
@lucky_esa sagte in Zeigt her eure Views zum Thema Mähroboter:
@sushibomba sagte in Zeigt her eure Views zum Thema Mähroboter:
OK schade. Warum wurde das denn überhaupt geändert? Und warum 8min.? Hast du das so eingestellt oder war WORX das selber und wenn ja was ist der Grund dafür? -> ????? Das sind die Datenpunkte .areas.area_x und startSequence mit dem ich ja mein Problem hab. Die 8 sind 8m die erste Zone.
Nein da hast du mich falsch verstanden. Genauso wie bei @haselchen ist es bei mir so, dass wenn der Landroid zurück fährt nachdem er seine Aufgabe erledigt hat, kommt er ja irgendwann in der Station an.
Jetzt seit den neusten Blockly's oder woran auch immer es liegt, wird nicht mehr der Datenpunkt "mower_status" direkt aktualisiert sobald er die Ladekontakte berührt. Dies geschieht leider erst 8min. später das er in den Status "Home (1)" wechselt.
Das ist in sofern suboptimal, da ich vorher den Status "Home(1)" vom "mower_status" als Trigger genommen habe in einem anderen Blockly und die Garagentore der WORX Garage runter zu fahren. Durch die Änderung passiert das dann also leider erst 8 Minuten später.Nochmal anders formuliert, wenn in der WORX App steht "Ausgangsposition 18:52h" als Beispiel, dann zeigt "mover_status" erst um 19:00h genau den Status "Home (1)" an.
@haselchen Ist dir mittlerweile eine Lösung für das Problem eingefallen, da wir ja beide scheinbar ne Garage mit Rollator haben die geschlossen werden soll, sobald der WORX in der Garage steht. -> Wieso habt ihr denn diese Probleme. Eigentlich werden die Daten bei Ankunft von Worx sofort gesendet. Wahrscheinlich verwendet ihr einen Trigger falsch.
Gruß//Lucky
Welchen Trigger sollen wir denn deiner Meinung für das stehen an den Ladekontakten verwenden außer "mover_status"?
Welchen Trigger sollen wir denn deiner Meinung für das stehen an den Ladekontakten verwenden außer "mover_status"?
Du meinst worx.0.xxx.mower.status ? Das wäre korrekt und funktioniert auch einwandfrei. Habe gerade meine Rüchfahrt beobachtet.
Gruß//Lucky
-
Welchen Trigger sollen wir denn deiner Meinung für das stehen an den Ladekontakten verwenden außer "mover_status"?
Du meinst worx.0.xxx.mower.status ? Das wäre korrekt und funktioniert auch einwandfrei. Habe gerade meine Rüchfahrt beobachtet.
Gruß//Lucky
Ja genau den meine ich. Aber wie kann das sein das @haselchen und ich exakt die gleiche Zeit haben. Ich habe es mit deinem Skript V1.8 getestet und da waren es genau die 8 Minuten bis sich der von dir erwähnte Datenpunkt aktualisiert hat auf "Home (1)".
Und ich weiß nicht warum. Habe sonst nichts anderes als Trigger gewählt. Wie gesagt. Vor ns Woche oder zwei war das noch nicht so und ich habe am Skript nichts geändert was die Rolladen schließt.
-
Ja genau den meine ich. Aber wie kann das sein das @haselchen und ich exakt die gleiche Zeit haben. Ich habe es mit deinem Skript V1.8 getestet und da waren es genau die 8 Minuten bis sich der von dir erwähnte Datenpunkt aktualisiert hat auf "Home (1)".
Und ich weiß nicht warum. Habe sonst nichts anderes als Trigger gewählt. Wie gesagt. Vor ns Woche oder zwei war das noch nicht so und ich habe am Skript nichts geändert was die Rolladen schließt.
@sushibomba sagte in Zeigt her eure Views zum Thema Mähroboter:
Ja genau den meine ich. Aber wie kann das sein das @haselchen und ich exakt die gleiche Zeit haben. Ich habe es mit deinem Skript V1.8 getestet und da waren es genau die 8 Minuten bis sich der von dir erwähnte Datenpunkt aktualisiert hat auf "Home (1)".
Und ich weiß nicht warum. Habe sonst nichts anderes als Trigger gewählt. Wie gesagt. Vor ns Woche oder zwei war das noch nicht so und ich habe am Skript nichts geändert was die Rolladen schließt.
Dann beobachte mal deine APP, ob es dort richtig aktualisiert wird. Das hat nichts mit dem Script oder mit dem Adapter zu tun.
Hast du denn einen Worx oder einen Anderen? Ihr könnt auch den Adapter mal auf debug stellen, vielleicht sieht man da mehr...Gruß//Lucky
-
@sushibomba sagte in Zeigt her eure Views zum Thema Mähroboter:
Ja genau den meine ich. Aber wie kann das sein das @haselchen und ich exakt die gleiche Zeit haben. Ich habe es mit deinem Skript V1.8 getestet und da waren es genau die 8 Minuten bis sich der von dir erwähnte Datenpunkt aktualisiert hat auf "Home (1)".
Und ich weiß nicht warum. Habe sonst nichts anderes als Trigger gewählt. Wie gesagt. Vor ns Woche oder zwei war das noch nicht so und ich habe am Skript nichts geändert was die Rolladen schließt.
Dann beobachte mal deine APP, ob es dort richtig aktualisiert wird. Das hat nichts mit dem Script oder mit dem Adapter zu tun.
Hast du denn einen Worx oder einen Anderen? Ihr könnt auch den Adapter mal auf debug stellen, vielleicht sieht man da mehr...Gruß//Lucky
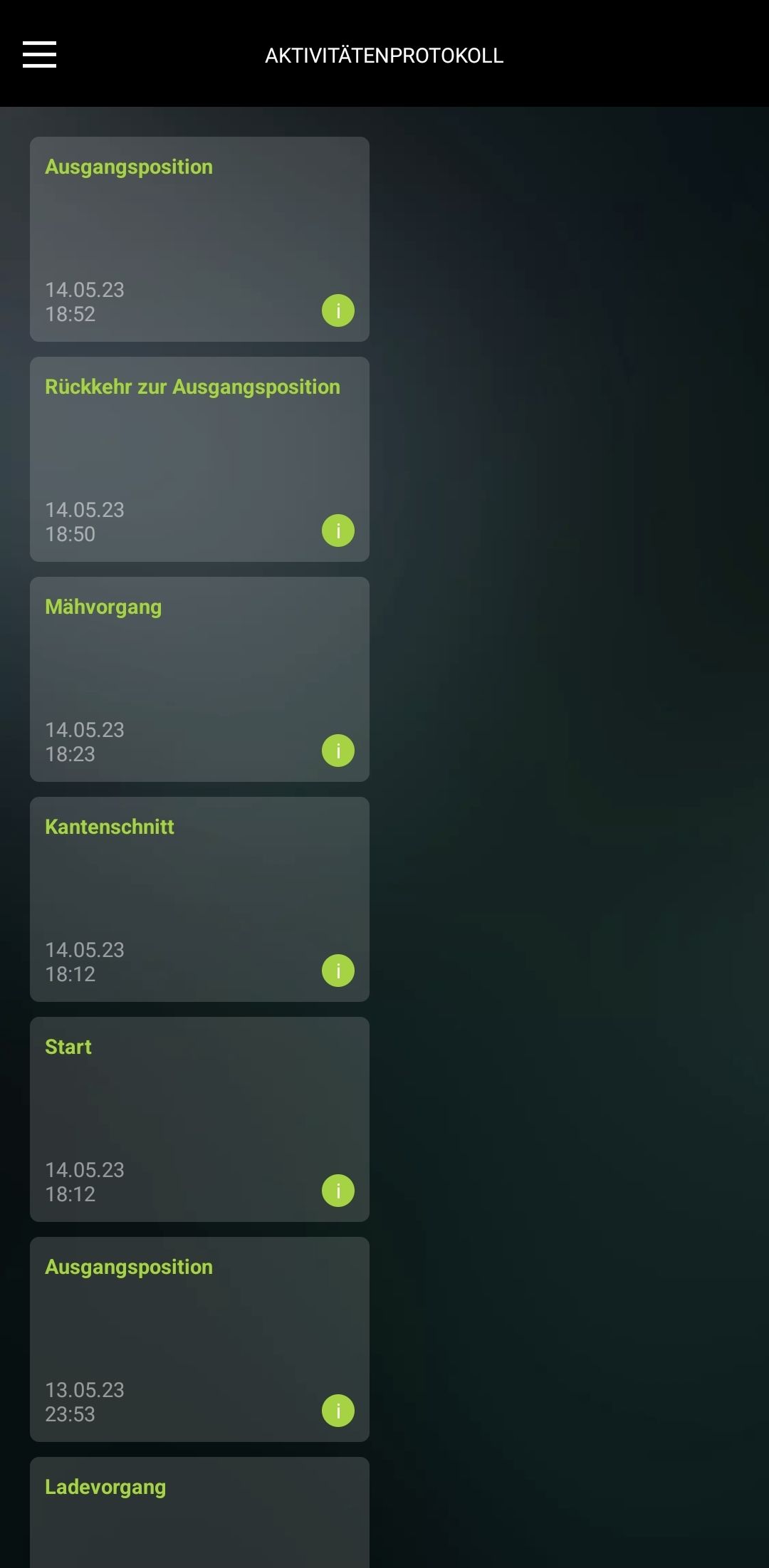
Also in der App wird alles richtig angezeigt. Hier das Bild von der letzten Fahrt. 18:52h war er zu Hause aber der Datenpunkt mower_status wurde um 19:00h erst aktualisiert.
Ja ich habe einen WORX M700.
-
Also in der App wird alles richtig angezeigt. Hier das Bild von der letzten Fahrt. 18:52h war er zu Hause aber der Datenpunkt mower_status wurde um 19:00h erst aktualisiert.
Ja ich habe einen WORX M700.
@sushibomba sagte in Zeigt her eure Views zum Thema Mähroboter:
Also in der App wird alles richtig angezeigt. Hier das Bild von der letzten Fahrt. 18:52h war er zu Hause aber der Datenpunkt mower_status wurde um 19:00h erst aktualisiert.
Dann bei der nächsten Fahrt den Adapter auf debug stellen.
Gruß//Lucky
-
@sushibomba sagte in Zeigt her eure Views zum Thema Mähroboter:
Also in der App wird alles richtig angezeigt. Hier das Bild von der letzten Fahrt. 18:52h war er zu Hause aber der Datenpunkt mower_status wurde um 19:00h erst aktualisiert.
Dann bei der nächsten Fahrt den Adapter auf debug stellen.
Gruß//Lucky
OK mache ich.
-
@Lucky_ESA
kurze Frage zu den 2 Mähzeiten. Bei mir in der App kann ich nur eine Zeit einstellen.
Der Versuch über´s Skript die zweite Mähzeit zu setzten scheiterte wahrscheinlich aus diesem Grund?Theretisch könne das Script doch auch so genutzt werden das die Mähzeit 1 einfach überschrieben wird?
-
@jippy sagte in Zeigt her eure Views zum Thema Mähroboter:
Moin, ich habe noch mal 2 Fragen...
- Teilweise wird die "Arbeitsdauer" bei mir falsch berechnet (nicht immer). Kann/muss man da noch irgendwo was einstellen oder wodurch kommt das zustande?

- Wenn ich z. B. eingestellt habe das er 5 Stunden mähen soll, dann muss er ja zwischendurch zum Aufladen. Gibt es eine Einstellung, dass er dann, wenn der Akku voll ist und die Endzeit noch nicht erreicht ist, wieder los fährt oder geht das nur mit einem zweiten Zeitfenster?
Gruß
JippyEinfach 5 Stunden einstellen. Wenn der AKKU zu Neige geht, lädt er wieder auf und fährt erneut los.
Gruß//Lucky
@lucky_esa said in Zeigt her eure Views zum Thema Mähroboter:
@jippy sagte in Zeigt her eure Views zum Thema Mähroboter:
Moin, ich habe noch mal 2 Fragen...
- Teilweise wird die "Arbeitsdauer" bei mir falsch berechnet (nicht immer). Kann/muss man da noch irgendwo was einstellen oder wodurch kommt das zustande?
- Wenn ich z. B. eingestellt habe das er 5 Stunden mähen soll, dann muss er ja zwischendurch zum Aufladen. Gibt es eine Einstellung, dass er dann, wenn der Akku voll ist und die Endzeit noch nicht erreicht ist, wieder los fährt oder geht das nur mit einem zweiten Zeitfenster?
Gruß
JippyEinfach 5 Stunden einstellen. Wenn der AKKU zu Neige geht, lädt er wieder auf und fährt erneut los.
Gruß//Lucky
Hallo Lucky,
erst mal Danke für deine superschnellen Rückmeldungen.
Das du Punkt 1 ein bisschen weiter oben schon beantwortet hast, habe ich übersehen gehabt, sorry.
Zu Punkt 2... ich habe bei "Manuelle_Fahrzeit" 300 Min. eigegeben. Da fährt er dann zwischendurch zum Laden an die Box, allerdings fährt er dann nicht selbstständig wieder los. Meintest du den Punkt "Manuelle_Fahrzeit" mit 5 Stunden einstellen? -
@lucky_esa said in Zeigt her eure Views zum Thema Mähroboter:
@jippy sagte in Zeigt her eure Views zum Thema Mähroboter:
Moin, ich habe noch mal 2 Fragen...
- Teilweise wird die "Arbeitsdauer" bei mir falsch berechnet (nicht immer). Kann/muss man da noch irgendwo was einstellen oder wodurch kommt das zustande?
- Wenn ich z. B. eingestellt habe das er 5 Stunden mähen soll, dann muss er ja zwischendurch zum Aufladen. Gibt es eine Einstellung, dass er dann, wenn der Akku voll ist und die Endzeit noch nicht erreicht ist, wieder los fährt oder geht das nur mit einem zweiten Zeitfenster?
Gruß
JippyEinfach 5 Stunden einstellen. Wenn der AKKU zu Neige geht, lädt er wieder auf und fährt erneut los.
Gruß//Lucky
Hallo Lucky,
erst mal Danke für deine superschnellen Rückmeldungen.
Das du Punkt 1 ein bisschen weiter oben schon beantwortet hast, habe ich übersehen gehabt, sorry.
Zu Punkt 2... ich habe bei "Manuelle_Fahrzeit" 300 Min. eigegeben. Da fährt er dann zwischendurch zum Laden an die Box, allerdings fährt er dann nicht selbstständig wieder los. Meintest du den Punkt "Manuelle_Fahrzeit" mit 5 Stunden einstellen?@jippy sagte in Zeigt her eure Views zum Thema Mähroboter:
@lucky_esa said in Zeigt her eure Views zum Thema Mähroboter:
@jippy sagte in Zeigt her eure Views zum Thema Mähroboter:
Moin, ich habe noch mal 2 Fragen...
- Teilweise wird die "Arbeitsdauer" bei mir falsch berechnet (nicht immer). Kann/muss man da noch irgendwo was einstellen oder wodurch kommt das zustande?
- Wenn ich z. B. eingestellt habe das er 5 Stunden mähen soll, dann muss er ja zwischendurch zum Aufladen. Gibt es eine Einstellung, dass er dann, wenn der Akku voll ist und die Endzeit noch nicht erreicht ist, wieder los fährt oder geht das nur mit einem zweiten Zeitfenster?
Gruß
JippyEinfach 5 Stunden einstellen. Wenn der AKKU zu Neige geht, lädt er wieder auf und fährt erneut los.
Gruß//Lucky
Hallo Lucky,
erst mal Danke für deine superschnellen Rückmeldungen.
Das du Punkt 1 ein bisschen weiter oben schon beantwortet hast, habe ich übersehen gehabt, sorry.
Zu Punkt 2... ich habe bei "Manuelle_Fahrzeit" 300 Min. eigegeben. Da fährt er dann zwischendurch zum Laden an die Box, allerdings fährt er dann nicht selbstständig wieder los. Meintest du den Punkt "Manuelle_Fahrzeit" mit 5 Stunden einstellen?Das geht mit diesem Datenpunkt nicht. Da musst du warten bis ich das Blockly 1.9 hochlade. Du kannst die Zeiten einstellen oder worx.0.xxx.mower.oneTimeStart und worx.0.xxx.mower.oneTimeWorkTime verwenden.
Gruß//Bodo
-
@Lucky_ESA
kurze Frage zu den 2 Mähzeiten. Bei mir in der App kann ich nur eine Zeit einstellen.
Der Versuch über´s Skript die zweite Mähzeit zu setzten scheiterte wahrscheinlich aus diesem Grund?Theretisch könne das Script doch auch so genutzt werden das die Mähzeit 1 einfach überschrieben wird?
@michisa86888 sagte in Zeigt her eure Views zum Thema Mähroboter:
@Lucky_ESA
kurze Frage zu den 2 Mähzeiten. Bei mir in der App kann ich nur eine Zeit einstellen.
Der Versuch über´s Skript die zweite Mähzeit zu setzten scheiterte wahrscheinlich aus diesem Grund?Theretisch könne das Script doch auch so genutzt werden das die Mähzeit 1 einfach überschrieben wird?
Für eine Mähzeit muss das Script angepasst werden. Dafür habe ich aber keine Zeit, sorry.
Vielleicht fällt mir noch was dazu ein.Gruß//Lucky
-
@jippy sagte in Zeigt her eure Views zum Thema Mähroboter:
@lucky_esa said in Zeigt her eure Views zum Thema Mähroboter:
@jippy sagte in Zeigt her eure Views zum Thema Mähroboter:
Moin, ich habe noch mal 2 Fragen...
- Teilweise wird die "Arbeitsdauer" bei mir falsch berechnet (nicht immer). Kann/muss man da noch irgendwo was einstellen oder wodurch kommt das zustande?
- Wenn ich z. B. eingestellt habe das er 5 Stunden mähen soll, dann muss er ja zwischendurch zum Aufladen. Gibt es eine Einstellung, dass er dann, wenn der Akku voll ist und die Endzeit noch nicht erreicht ist, wieder los fährt oder geht das nur mit einem zweiten Zeitfenster?
Gruß
JippyEinfach 5 Stunden einstellen. Wenn der AKKU zu Neige geht, lädt er wieder auf und fährt erneut los.
Gruß//Lucky
Hallo Lucky,
erst mal Danke für deine superschnellen Rückmeldungen.
Das du Punkt 1 ein bisschen weiter oben schon beantwortet hast, habe ich übersehen gehabt, sorry.
Zu Punkt 2... ich habe bei "Manuelle_Fahrzeit" 300 Min. eigegeben. Da fährt er dann zwischendurch zum Laden an die Box, allerdings fährt er dann nicht selbstständig wieder los. Meintest du den Punkt "Manuelle_Fahrzeit" mit 5 Stunden einstellen?Das geht mit diesem Datenpunkt nicht. Da musst du warten bis ich das Blockly 1.9 hochlade. Du kannst die Zeiten einstellen oder worx.0.xxx.mower.oneTimeStart und worx.0.xxx.mower.oneTimeWorkTime verwenden.
Gruß//Bodo
Das geht mit diesem Datenpunkt nicht. Da musst du warten bis ich das Blockly 1.9 hochlade. Du kannst die Zeiten einstellen oder worx.0.xxx.mower.oneTimeStart und worx.0.xxx.mower.oneTimeWorkTime verwenden.
Gruß//Bodo
OK, Danke dann warte ich auf die 1.9er Version.
Gruß
Jippy -
@haselchen hast du ihn schon mit debug fahren lassen? Ich habe es leider noch nicht geschafft. Bin erst am Wochenende wieder zu Hause.
@Lucky_ESA weißt du schon in etwa wann du die v1.9 hochladen wirst?
-
@haselchen hast du ihn schon mit debug fahren lassen? Ich habe es leider noch nicht geschafft. Bin erst am Wochenende wieder zu Hause.
@Lucky_ESA weißt du schon in etwa wann du die v1.9 hochladen wirst?
@Lucky_ESA weißt du schon in etwa wann du die v1.9 hochladen wirst?
Habe gerade meine Änderungen per Pull Request an tombox gesendet. Sobald diese Änderungen übernommen wurden, kann ich die Dateien hochladen. Bedenke bitte das alle Funktionen nur über IQontrol zu steuern sind. Möchtest du diese auch in VIS haben, musst du dir diese selber hinzufügen.
Gruß//Lucky
-
@Lucky_ESA weißt du schon in etwa wann du die v1.9 hochladen wirst?
Habe gerade meine Änderungen per Pull Request an tombox gesendet. Sobald diese Änderungen übernommen wurden, kann ich die Dateien hochladen. Bedenke bitte das alle Funktionen nur über IQontrol zu steuern sind. Möchtest du diese auch in VIS haben, musst du dir diese selber hinzufügen.
Gruß//Lucky
Verstehe. Kenne dieses Iqcontrol nicht. Schaue ich mir aber mal an. Wäre klasse, wenn du vielleicht immer nen kurzes Update Log dazu schreiben könntest hier, welche Änderungen es von v1.8 zu v1.9 geben wird.
Ich kann aber auch die v1.9 nutzen ohne Iqcontrol oder?
-
Verstehe. Kenne dieses Iqcontrol nicht. Schaue ich mir aber mal an. Wäre klasse, wenn du vielleicht immer nen kurzes Update Log dazu schreiben könntest hier, welche Änderungen es von v1.8 zu v1.9 geben wird.
Ich kann aber auch die v1.9 nutzen ohne Iqcontrol oder?
Ich kann aber auch die v1.9 nutzen ohne Iqcontrol oder?
Ja kannst du. Du kannst auch beide Blocklys verwenden und über VIS HTML diesen Datenpunkt auslesen:
{0_userdata.0.Mahroboter.Zeiten.html_string}Changelog ist oben.
Das ist noch wichtig und kann bei Bedarf ausgelesen werden:

Gruß//Lucky
-
Ich kann aber auch die v1.9 nutzen ohne Iqcontrol oder?
Ja kannst du. Du kannst auch beide Blocklys verwenden und über VIS HTML diesen Datenpunkt auslesen:
{0_userdata.0.Mahroboter.Zeiten.html_string}Changelog ist oben.
Das ist noch wichtig und kann bei Bedarf ausgelesen werden:
Gruß//Lucky
Top ich danke dir für die Arbeit 👍🏻👍🏻👍🏻
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
367
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge