

Test Adapter pid (pid-Regler) V1.0.x
-
@mcm57 eine ganz große Bitte für die Doku:
This adapter provides the functionality of a pid controller. Within one instance there could be more than one controller configured. The adpter supports configuring the paramaters (P, I, D components) and the cycle time used for calculation.
Was um Alles in der Welt ist ein PID Regler?
auch @Paul53 schreibt dauernd davon.Könnteyt du dazu einen Zweizeiler in die Doku nehmen?
@homoran
Danke fürs Feedback.
Hab zwar in der docu auf wikipedia verlinkt, werd aber ein paar Worte direkt ins Readme schreiben damit dem User klar ist um was es prinzipiell mal geht.Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@homoran sagte: Was um Alles in der Welt ist ein PID Regler?
@paul53 said in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@homoran sagte: Was um Alles in der Welt ist ein PID Regler?
Und bevor die Farge kommt - ja deutsche Doku mach ich auch. Aber erst wenn klar ist ob / was sich ändert und die englische dem IST STand entspricht. Wenn wer vorher Fragen hat - es muss ja nicht jeder english können - bitte melden !
-
@homoran
Danke fürs Feedback.
Hab zwar in der docu auf wikipedia verlinkt, werd aber ein paar Worte direkt ins Readme schreiben damit dem User klar ist um was es prinzipiell mal geht.@mcm57 Ich versuche gerade mal, was mit dem Adapter zu machen. Hab als 'Regler-ID' die Produktion meines Solarkraftwerks eingegeben. Dann dachte ich, dass hier im Adapter unter 'akt' der gerade aktuelle Wert stehen müsste und dann sollte ja irgendwo auch der berechnete Wert mit den Faktoren aus PID zu finden sein. Bei mir ist alles 0. Wo hab ich den Denkfehler?
Host: Fujitsu Intel(R) Pentium(R) CPU G4560T, 32 GB RAM, Proxmox 8.x + lxc Ubuntu 22.04
ioBroker (8 GB RAM) Node.js: 20.19.1, NPM: 10.8.2, js-Controller: 7.0.6, Admin: 7.6.3
Wetterstation: Froggit WH3000SE V1.6.6 -
@mcm57 eine ganz große Bitte für die Doku:
This adapter provides the functionality of a pid controller. Within one instance there could be more than one controller configured. The adpter supports configuring the paramaters (P, I, D components) and the cycle time used for calculation.
Was um Alles in der Welt ist ein PID Regler?
auch @Paul53 schreibt dauernd davon.Könnteyt du dazu einen Zweizeiler in die Doku nehmen?
@homoran
Hab mal eine Kurzbeschreibung ins Readme eingefügt. Wenn du Zeit / Lust hast schaus dir an.
Link zu Wikipedia ist inder docu (docs/en/pid.md)Eine Kopie von wikipedia im Readme ist sicher übertrieben. Aber ich glaube die Ergänzung informiert den User mal ausreichend damit er entscheiden kann ob er sich weiter hinein vertieft oder das Ding für ihne uninteressant ist.
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@mcm57 Ich versuche gerade mal, was mit dem Adapter zu machen. Hab als 'Regler-ID' die Produktion meines Solarkraftwerks eingegeben. Dann dachte ich, dass hier im Adapter unter 'akt' der gerade aktuelle Wert stehen müsste und dann sollte ja irgendwo auch der berechnete Wert mit den Faktoren aus PID zu finden sein. Bei mir ist alles 0. Wo hab ich den Denkfehler?
@rene55
Der Adapter ist stand alone. Regler ID dient nur dazu die Namen der States zu definieren. Hier kannst du z.B.1 oder auch einen (kurzen) Namen eintragenFür die Benutzung musst du (neben den Paramatern) den Sollwert in den State 'set' und den Ist-Wert in den state 'act' schreiben, z.B. per js, blockly, rules, ... Siehe Beschreibung der states in en/pid.md
Im Prinzip wär es natürlich denkbar, dass sich der Adapter an existierende States "anhängt". Könnt ev. als Feature eingequeued werden wenn es gewiunschen ist. Frage ist da nur wie das zu konfigurieren geht und ob es ausreicht act und y dann mit was zu verknüpfen ....
Erstell einen Feature Request wenn es dir wichtig ist mit möglich genauer Info was da geunschen ist. Aber bitte bedenk, dass der Adapter kein Steuerungsdesign_und_Stromlaufplan-Werkzeug werden kann (und soll).
Für V0.0.1 quetsch ich das aber nicht mehr rein.
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@homoran
Hab mal eine Kurzbeschreibung ins Readme eingefügt. Wenn du Zeit / Lust hast schaus dir an.
Link zu Wikipedia ist inder docu (docs/en/pid.md)Eine Kopie von wikipedia im Readme ist sicher übertrieben. Aber ich glaube die Ergänzung informiert den User mal ausreichend damit er entscheiden kann ob er sich weiter hinein vertieft oder das Ding für ihne uninteressant ist.
@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Eine Kopie von wikipedia im Readme ist sicher übertrieben.
denk ich auch.
Hab's gera mal auf Wikipedia überflogen. Das mit einem Zweizeiler zu schaffen war wohl zu optimistisch
kein Support per PN! - Fragen im Forum stellen -
Benutzt das Voting rechts unten im Beitrag wenn er euch geholfen hat.
Das Forum freut sich über eine Spende. Benutzt dazu den Spendenbutton oben rechts. Danke!
der Installationsfixer: curl -fsL https://iobroker.net/fix.sh | bash - -
@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Eine Kopie von wikipedia im Readme ist sicher übertrieben.
denk ich auch.
Hab's gera mal auf Wikipedia überflogen. Das mit einem Zweizeiler zu schaffen war wohl zu optimistisch -
@rene55
Der Adapter ist stand alone. Regler ID dient nur dazu die Namen der States zu definieren. Hier kannst du z.B.1 oder auch einen (kurzen) Namen eintragenFür die Benutzung musst du (neben den Paramatern) den Sollwert in den State 'set' und den Ist-Wert in den state 'act' schreiben, z.B. per js, blockly, rules, ... Siehe Beschreibung der states in en/pid.md
Im Prinzip wär es natürlich denkbar, dass sich der Adapter an existierende States "anhängt". Könnt ev. als Feature eingequeued werden wenn es gewiunschen ist. Frage ist da nur wie das zu konfigurieren geht und ob es ausreicht act und y dann mit was zu verknüpfen ....
Erstell einen Feature Request wenn es dir wichtig ist mit möglich genauer Info was da geunschen ist. Aber bitte bedenk, dass der Adapter kein Steuerungsdesign_und_Stromlaufplan-Werkzeug werden kann (und soll).
Für V0.0.1 quetsch ich das aber nicht mehr rein.
@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Steuerungsdesign_und_Stromlaufplan-Werkzeug
Soetwas hatte ich eigentlich erwartet.
@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Adapter an existierende States "anhängt"
Sah aber schon sehr gut aus, da er den Quelldatenpunkt schön aufgedröselt hatte.
Ok, dann werde ich mal die Werte über die States eingeben und mal weiter schauen.
Host: Fujitsu Intel(R) Pentium(R) CPU G4560T, 32 GB RAM, Proxmox 8.x + lxc Ubuntu 22.04
ioBroker (8 GB RAM) Node.js: 20.19.1, NPM: 10.8.2, js-Controller: 7.0.6, Admin: 7.6.3
Wetterstation: Froggit WH3000SE V1.6.6 -
@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Steuerungsdesign_und_Stromlaufplan-Werkzeug
Soetwas hatte ich eigentlich erwartet.
@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Adapter an existierende States "anhängt"
Sah aber schon sehr gut aus, da er den Quelldatenpunkt schön aufgedröselt hatte.
Ok, dann werde ich mal die Werte über die States eingeben und mal weiter schauen.
@rene55 said in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Steuerungsdesign_und_Stromlaufplan-Werkzeug
Soetwas hatte ich eigentlich erwartet.
OK, als V1.x.x mach ich das auch noch.
Und im Ernst - schreib wirklich in einen Feture Request rein was du brauchst. iob ist zwar kein Wunschkonzert und ich kann und will nicht versprechen was ich einbau, aber je besser kalr ist was gewunschen wird, desto eher kannman überlegen ob und wie das geht.Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@rene55 said in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Steuerungsdesign_und_Stromlaufplan-Werkzeug
Soetwas hatte ich eigentlich erwartet.
OK, als V1.x.x mach ich das auch noch.
Und im Ernst - schreib wirklich in einen Feture Request rein was du brauchst. iob ist zwar kein Wunschkonzert und ich kann und will nicht versprechen was ich einbau, aber je besser kalr ist was gewunschen wird, desto eher kannman überlegen ob und wie das geht. -
Aktuelle Test Version 1.0.0 Veröffentlichungsdatum 11.3.2024 Github Link https://github.com/iobroker-community-adapters/ioBroker.pid Adapter Beschreibung, Changelog
[INFO]
Die aus der ersten Diskussionrunde resultierenden Änderungen wurden umgesetzt.
Zur aktuellen Diskussion gehts hier: https://forum.iobroker.net/topic/64250/test-neuer-adapter-pid-pid-regler-v0-0-x/206
Dieser Adapter stellt einen konfigurierbaren pid Regler zur Verfügung.
Je Instanz können beliebig viele Regler konfiguriert werden. Im Einstellungsmenu stehen die wichtigsten Reglerparamater (P, I, D Anteil, Zykluszeit sowie Minimum und Maximumwerte zur Verfügung. Aktuelle Werte werden via Zuständen übergeben.
Zusätzlich kann der Regler angehalten (Zustand 'run ') und resetted (Zustand 'rst') werden.
Weiters kann der Regler via manuellem Eingabewert (Zustände 'man' und 'man_inp') übersteuert werden, falls dies in einer Anwendung benötigt wird.
Eine Beschreibung findet sich hier:
https://github.com/iobroker-community-adapters/ioBroker.pid/blob/master/docs/de/pid_de.md
https://github.com/iobroker-community-adapters/ioBroker.pid/blob/master/docs/en/pid.md
Changelog
1.0.0
- BREAKING: Adapter benötigt nun node.js 18 oder neuer
- BREAKING: Adapter erfordert jetzt js-controller 5.x.x und admin 6.x.x oder neuer
- Offset war nicht funktionsfähig. Das Problem wurde behoben. (#105)
- Die falsche Fehlermeldung, wenn keine Controller fehlerhaft sind, wurde entfernt. (#68)
- State-Roles wurden überprüft und angepasst. (#88)
- Abhängigkeiten wurden aktualisiert.",
0.0.7
- geändert: Die Zykluszeit muss nun mindestens 100ms betragen
- geändert: Neuberechnungen werden nur mehr durch den Taktgeber gesteuert, es werden keine zusätzlichen Updates durchgeführt (#62)
- geändert: Abhängigkeiten wurden aktualisiert
0.0.6
- behoben: Die fehlerhafte Berechnung bei Erreichen der max/min Limits wurde korrigiert
0.0.5
- Adapter ist nun via npm verfügbar
0.0.4
- Zustand last_upd_str wurde entfernt
- Diverse Roles wurden angepasst
0.0.3.alpha.0
- neu: Eine optionale Ordnerstruktur für Zustände wurde implementiert.
- geändert: Timer wird bei Neustart nach Pausierung nun resetted.
- geändert: Werte für act und set werden nun gespeichert und beim Starten des Adapters verwendet
- geändert: Zustandsänderungen mit ack=true werden gelogged
- geändert: Falsche Updates beim Schreiben des act Zustands werden nun verhindert
- geändert: Funktionsfehler des Invert-Flags wurden behoben
- geändert: Die Fehleranzeige beim Erreichen der Limits wurde entfernt.
- geändert: q-Flag-Handling wurde korrigiert
- geändert: Unerwartetes Verhalten des sup-Parameters wurde behoben
- geändert: Der Eingabe-Zustand 'run' wurde auf 'hold' umbenannt."
0.0.2.alpha.2
- geändert: die Werte von kp, xp und sup werden nun auch überprüft falls diese mittels Zuständen verändert werden
- geändert: Werte von min und max werden nun auch überprüftfalls diese mittels Zuständen verändert werden
- geändert: Aktivierung von man atzualisiert nun y mit aktuellem Wert von man_inp
- geändert: min Wert wird nun beim Neustart der Instanz nicht neu initialisiert
- geändert: Umrechnung zwischen kp und xp wurde an mehreren Stellen korrigiert
- geändert: kp oder xp werden jetzt gemäß Modeauswahl schreibgeschützt"
0.0.2-alpha.1
- (McM19157) zweite Testversion nach Diskussionsrunde
zur aktuellen Diskussion gehts hier: https://forum.iobroker.net/topic/64250/test-neuer-adapter-pid-pid-regler-v0-0-1-alpha-x/63
0.0.1-alpha.x
(McM19157) erste TestversionBitte Probleme / Fragen hier im Forum deponieren oder auch als Issues direkt im Adapter repository anlegen:
https://github.com/iobroker-community-adapters/ioBroker.envertech-pv/issuesDanke für eure Zeit beim Testen und für jedes Feedback / Kritik / Anregung.
McM57
@mcm57
Du berechnest nach der theoretischen Methode (auf die Regelabweichung bezogen)this.y = this.data.off + this.k_p * this.err + this.k_i * this.sumErr + this.k_d * this.diffErr;Das wird in der Praxis selten angewendet. Man arbeitet mit Xp (Proportionalband), Tn (Nachstellzeit) und Tv (Vorhaltezeit).
y = diff * (max - min) / Xp * (1 + Summe(dt / Tn) + Tv/dt) + offsetHabe ich es nur nicht gefunden oder ist eine Umkehr der Regelrichtung (Stichwort: Heizen/Kühlen) nicht vorgesehen?
Den selten gebrauchten D-Anteil sollte man nur auf den Istwert anwenden, da der Sollwert meist große Sprünge macht.
Bitte verzichtet auf Chat-Nachrichten, denn die Handhabung ist grauenhaft !
Produktiv: Asus PN 42 / N100 / 8 GB / 500 GB; Proxmox mit 2 VM (iob / openCCU) -
@mcm57
Du berechnest nach der theoretischen Methode (auf die Regelabweichung bezogen)this.y = this.data.off + this.k_p * this.err + this.k_i * this.sumErr + this.k_d * this.diffErr;Das wird in der Praxis selten angewendet. Man arbeitet mit Xp (Proportionalband), Tn (Nachstellzeit) und Tv (Vorhaltezeit).
y = diff * (max - min) / Xp * (1 + Summe(dt / Tn) + Tv/dt) + offsetHabe ich es nur nicht gefunden oder ist eine Umkehr der Regelrichtung (Stichwort: Heizen/Kühlen) nicht vorgesehen?
Den selten gebrauchten D-Anteil sollte man nur auf den Istwert anwenden, da der Sollwert meist große Sprünge macht.
@paul53
Ja das hast du richtig erkennt. Ich habe die Funktion ident zum hier an anderer Stelle schon erwähnten node-pid-controller (https://github.com/Philmod/node-pid-controller) umgesetzt. Da wird die D Komponente auch auch den Error angewendet. Deine Anregung bezüglich Sprungverhalten versteh ich aber.Eine Invertierung des Ausgangs hab ich nicht vorgesehen. Diese wäre leicht außerhalb machbar, kann ich aber auch im Regler vorsehen wenn Bedarf besteht (wär ja trivial :-) ). Bitte ggF. Feature Request einstellen.
Im Prinzip ist es aber trivial auch eine andere Funktion umzusetzen, d.h. auf Nachstellzeit / Vorhaltezeit zu wechseln. Nur beide Optionen will ich nicht anbieten :-).
BITTE UM EURE MEINUNG: Soll ich auf tn/tv umstellen gemäß obiger Formel? Oder das Verhalten analog zu node-pid-controller beibehalten???
Wobei ich bei einer Umstellung noch Nachhilfe bei der Formel brauch. (Will meine Scripten aus den 80ern nicht im Keller suchen gehen). Summe(dt/Tn) ist irgendwie nicht stimmig im I Anteil muss doch die Summe der Fehler auftreten.
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@paul53
Ja das hast du richtig erkennt. Ich habe die Funktion ident zum hier an anderer Stelle schon erwähnten node-pid-controller (https://github.com/Philmod/node-pid-controller) umgesetzt. Da wird die D Komponente auch auch den Error angewendet. Deine Anregung bezüglich Sprungverhalten versteh ich aber.Eine Invertierung des Ausgangs hab ich nicht vorgesehen. Diese wäre leicht außerhalb machbar, kann ich aber auch im Regler vorsehen wenn Bedarf besteht (wär ja trivial :-) ). Bitte ggF. Feature Request einstellen.
Im Prinzip ist es aber trivial auch eine andere Funktion umzusetzen, d.h. auf Nachstellzeit / Vorhaltezeit zu wechseln. Nur beide Optionen will ich nicht anbieten :-).
BITTE UM EURE MEINUNG: Soll ich auf tn/tv umstellen gemäß obiger Formel? Oder das Verhalten analog zu node-pid-controller beibehalten???
Wobei ich bei einer Umstellung noch Nachhilfe bei der Formel brauch. (Will meine Scripten aus den 80ern nicht im Keller suchen gehen). Summe(dt/Tn) ist irgendwie nicht stimmig im I Anteil muss doch die Summe der Fehler auftreten.
@mcm57 sagte: Summe(dt/Tn) ist irgendwie nicht stimmig im I Anteil muss doch die Summe der Fehler auftreten.
Ja natürlich, ist eine vereinfachte Darstellung. Es ist bezüglich Deiner Berechnung nur zu beachten, dass kp als Multiplikator in alle 3 Komponenten (PID) eingeht: Tn und Tv sind auf den Ausgang bezogen. Tn ist die Zeit, um die sich der Ausgang nochmal um den gleichen Betrag ändert wie durch den P-Anteil.
Formel:
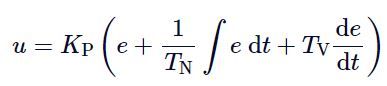
mit
Kp = (MaxOut - MinOut) / XpBitte verzichtet auf Chat-Nachrichten, denn die Handhabung ist grauenhaft !
Produktiv: Asus PN 42 / N100 / 8 GB / 500 GB; Proxmox mit 2 VM (iob / openCCU) -
@mcm57 sagte: Summe(dt/Tn) ist irgendwie nicht stimmig im I Anteil muss doch die Summe der Fehler auftreten.
Ja natürlich, ist eine vereinfachte Darstellung. Es ist bezüglich Deiner Berechnung nur zu beachten, dass kp als Multiplikator in alle 3 Komponenten (PID) eingeht: Tn und Tv sind auf den Ausgang bezogen. Tn ist die Zeit, um die sich der Ausgang nochmal um den gleichen Betrag ändert wie durch den P-Anteil.
Formel:
mit
Kp = (MaxOut - MinOut) / Xp@paul53
OK, dann wart ich mal ab ob / was zu dem Thema noch kommt. In github hat fu-zhou auch einigen Input / Anregungen gegeben. Möchte gerne warten was er schreibt (außer du bist eh fu-zhou - forum / github / telegram = multiple Persönlichkeiten :-) )Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@paul53
OK, dann wart ich mal ab ob / was zu dem Thema noch kommt. In github hat fu-zhou auch einigen Input / Anregungen gegeben. Möchte gerne warten was er schreibt (außer du bist eh fu-zhou - forum / github / telegram = multiple Persönlichkeiten :-) ) -
@mcm57 sagte: Summe(dt/Tn) ist irgendwie nicht stimmig im I Anteil muss doch die Summe der Fehler auftreten.
Ja natürlich, ist eine vereinfachte Darstellung. Es ist bezüglich Deiner Berechnung nur zu beachten, dass kp als Multiplikator in alle 3 Komponenten (PID) eingeht: Tn und Tv sind auf den Ausgang bezogen. Tn ist die Zeit, um die sich der Ausgang nochmal um den gleichen Betrag ändert wie durch den P-Anteil.
Formel:
mit
Kp = (MaxOut - MinOut) / Xp@paul53 said in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@mcm57 sagte: Summe(dt/Tn) ist irgendwie nicht stimmig im I Anteil muss doch die Summe der Fehler auftreten.
Ja natürlich, ist eine vereinfachte Darstellung. Es ist bezüglich Deiner Berechnung nur zu beachten, dass kp als Multiplikator in alle 3 Komponenten (PID) eingeht: Tn und Tv sind auf den Ausgang bezogen. Tn ist die Zeit, um die sich der Ausgang nochmal um den gleichen Betrag ändert wie durch den P-Anteil.
Formel:
mit
Kp = (MaxOut - MinOut) / XpDas bedeutet also:
MaxOut und MinOut Werte werden obligatorisch.Kp = (MaxOut-MinOut) / Xp e = act - set (Integral e) ... e + e[t-1] + e[t-2] .... Summe aller Differenzen, sumErr derzeit de = e - e[t-1] Input act ... aktueller IST Wert (Input) set ... aktueller SOLL Wert (Input) Parameter Xp ... Parameter für Verstärkung (und damit auch Proportionalanteil) Tn ... Nachlaufzeit (ms) - Parameter für Integralanteil Tv ... Vorhaltezeit (ms) - Parameter für Differentialanteil dt ... Zeitdifferenz zu letzter Berechnung (ms), ca Zykluszeit od Zeit zw 2 manuellen Triggern Output u ... output, derzeit yDen Sinn des Max-Min Terms versteh ich nur bedingt. Die Begrenzung des Ausgangswertes auf Max bzw. Min erspart das jedenfalls nicht. Die Differenz zwischen Act und Set kann ja "beliebig" sein. Ergo könnte man max und min ja auch in Xp berücksichtigen. Da brauch ich noch ne Erklärung.
Offset wird in jedem Fall noch dazu gerechnet.
Und Invertierung wäre ja einfache Invertieren des Ausgangswerte ( y = -y). Oder überseh ich da was?
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
-
@paul53 said in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@mcm57 sagte: Summe(dt/Tn) ist irgendwie nicht stimmig im I Anteil muss doch die Summe der Fehler auftreten.
Ja natürlich, ist eine vereinfachte Darstellung. Es ist bezüglich Deiner Berechnung nur zu beachten, dass kp als Multiplikator in alle 3 Komponenten (PID) eingeht: Tn und Tv sind auf den Ausgang bezogen. Tn ist die Zeit, um die sich der Ausgang nochmal um den gleichen Betrag ändert wie durch den P-Anteil.
Formel:
mit
Kp = (MaxOut - MinOut) / XpDas bedeutet also:
MaxOut und MinOut Werte werden obligatorisch.Kp = (MaxOut-MinOut) / Xp e = act - set (Integral e) ... e + e[t-1] + e[t-2] .... Summe aller Differenzen, sumErr derzeit de = e - e[t-1] Input act ... aktueller IST Wert (Input) set ... aktueller SOLL Wert (Input) Parameter Xp ... Parameter für Verstärkung (und damit auch Proportionalanteil) Tn ... Nachlaufzeit (ms) - Parameter für Integralanteil Tv ... Vorhaltezeit (ms) - Parameter für Differentialanteil dt ... Zeitdifferenz zu letzter Berechnung (ms), ca Zykluszeit od Zeit zw 2 manuellen Triggern Output u ... output, derzeit yDen Sinn des Max-Min Terms versteh ich nur bedingt. Die Begrenzung des Ausgangswertes auf Max bzw. Min erspart das jedenfalls nicht. Die Differenz zwischen Act und Set kann ja "beliebig" sein. Ergo könnte man max und min ja auch in Xp berücksichtigen. Da brauch ich noch ne Erklärung.
Offset wird in jedem Fall noch dazu gerechnet.
Und Invertierung wäre ja einfache Invertieren des Ausgangswerte ( y = -y). Oder überseh ich da was?
@mcm57 sagte: Die Begrenzung des Ausgangswertes auf Max bzw. Min erspart das jedenfalls nicht.
Das ist die Begrenzung des Ausgangswertes. Stellglieder haben einen begrenzten Stellbereich, meist 0 ... 100 %. Darauf bezieht sich das Proportionalband Xp.
Beispiel für P-Anteil: Xp = 4; Offset = 50 = (Max + Min) / 2; e = -1 --> y = 25 %@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Und Invertierung wäre ja einfache Invertieren des Ausgangswerte ( y = -y).
Invertierung von Kp oder e.
Bitte verzichtet auf Chat-Nachrichten, denn die Handhabung ist grauenhaft !
Produktiv: Asus PN 42 / N100 / 8 GB / 500 GB; Proxmox mit 2 VM (iob / openCCU) -
@mcm57 sagte: Die Begrenzung des Ausgangswertes auf Max bzw. Min erspart das jedenfalls nicht.
Das ist die Begrenzung des Ausgangswertes. Stellglieder haben einen begrenzten Stellbereich, meist 0 ... 100 %. Darauf bezieht sich das Proportionalband Xp.
Beispiel für P-Anteil: Xp = 4; Offset = 50 = (Max + Min) / 2; e = -1 --> y = 25 %@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Und Invertierung wäre ja einfache Invertieren des Ausgangswerte ( y = -y).
Invertierung von Kp oder e.
Boah, jetzt geht's ja ganz schön ab hier, sehr schön! Hier mal mein Input:
@paul53 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@mcm57
Du berechnest nach der theoretischen Methode (auf die Regelabweichung bezogen)this.y = this.data.off + this.k_p * this.err + this.k_i * this.sumErr + this.k_d * this.diffErr;Das wird in der Praxis selten angewendet. Man arbeitet mit Xp (Proportionalband), Tn (Nachstellzeit) und Tv (Vorhaltezeit).
y = diff * (max - min) / Xp * (1 + Summe(dt / Tn) + Tv/dt) + offsetHabe ich es nur nicht gefunden oder ist eine Umkehr der Regelrichtung (Stichwort: Heizen/Kühlen) nicht vorgesehen?
Den selten gebrauchten D-Anteil sollte man nur auf den Istwert anwenden, da der Sollwert meist große Sprünge macht.
Ich gebe paul53 da Recht, auch wenn ich nur Regler-Anwender, nicht Regler-Programmierer bin. Bei der Optimierung eines Regelkreises, z.B. nach Ziegler-Nichols, berechnet man über die Formel tatsächlich die Nachstellzeit Tn und (wo notwendig) die Vorhaltezeit Tv in Sekunden, was ich auch irgendwie greifbarer finde - weil ich das halt kenne.
Zum Heizen/Kühlen: Das ist eine Split-Range-Regelung, lässt sich über MIN MAX out (LL, LH) realisieren, z.B. MIN = -100%, MAX = 100%. Der Regler startet bei 0% (=kein Energieverbrauch), bei positiver Regelabweichung (w-x > 0) schiebt der Regler den Ausgang Richtung 100%, also wird mit 0-100% ein Heizventil angesteuert und bei negativer Regelabweichung schiebt der Regler Richtung -100% und damit wird dann ein Kühlventil angesteuert. Habe ich nur ein Stellglied, in meinem Fall wieder die Wallbox, die 1,4 - 11 kW kann, ist MIN 0 und MAX 11, wobei ich MAX mit Blockly bestimme: Nachts, wenn die Hausbatterie leer ist, darf die Wallbox mit 11 kW laden, tagsüber max. mit dem PV-Überschuss. Das hilft, den Regler entsprechend schnell zu begrenzen, wenn eine Wolke drüber zieht, der Regler muss dann nicht mit den eingestellten Parametern zurückregeln.
Synology DS920+ VM, S7-315 PN mit ET200S
-
Boah, jetzt geht's ja ganz schön ab hier, sehr schön! Hier mal mein Input:
@paul53 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@mcm57
Du berechnest nach der theoretischen Methode (auf die Regelabweichung bezogen)this.y = this.data.off + this.k_p * this.err + this.k_i * this.sumErr + this.k_d * this.diffErr;Das wird in der Praxis selten angewendet. Man arbeitet mit Xp (Proportionalband), Tn (Nachstellzeit) und Tv (Vorhaltezeit).
y = diff * (max - min) / Xp * (1 + Summe(dt / Tn) + Tv/dt) + offsetHabe ich es nur nicht gefunden oder ist eine Umkehr der Regelrichtung (Stichwort: Heizen/Kühlen) nicht vorgesehen?
Den selten gebrauchten D-Anteil sollte man nur auf den Istwert anwenden, da der Sollwert meist große Sprünge macht.
Ich gebe paul53 da Recht, auch wenn ich nur Regler-Anwender, nicht Regler-Programmierer bin. Bei der Optimierung eines Regelkreises, z.B. nach Ziegler-Nichols, berechnet man über die Formel tatsächlich die Nachstellzeit Tn und (wo notwendig) die Vorhaltezeit Tv in Sekunden, was ich auch irgendwie greifbarer finde - weil ich das halt kenne.
Zum Heizen/Kühlen: Das ist eine Split-Range-Regelung, lässt sich über MIN MAX out (LL, LH) realisieren, z.B. MIN = -100%, MAX = 100%. Der Regler startet bei 0% (=kein Energieverbrauch), bei positiver Regelabweichung (w-x > 0) schiebt der Regler den Ausgang Richtung 100%, also wird mit 0-100% ein Heizventil angesteuert und bei negativer Regelabweichung schiebt der Regler Richtung -100% und damit wird dann ein Kühlventil angesteuert. Habe ich nur ein Stellglied, in meinem Fall wieder die Wallbox, die 1,4 - 11 kW kann, ist MIN 0 und MAX 11, wobei ich MAX mit Blockly bestimme: Nachts, wenn die Hausbatterie leer ist, darf die Wallbox mit 11 kW laden, tagsüber max. mit dem PV-Überschuss. Das hilft, den Regler entsprechend schnell zu begrenzen, wenn eine Wolke drüber zieht, der Regler muss dann nicht mit den eingestellten Parametern zurückregeln.
-
@mcm57 sagte: Die Begrenzung des Ausgangswertes auf Max bzw. Min erspart das jedenfalls nicht.
Das ist die Begrenzung des Ausgangswertes. Stellglieder haben einen begrenzten Stellbereich, meist 0 ... 100 %. Darauf bezieht sich das Proportionalband Xp.
Beispiel für P-Anteil: Xp = 4; Offset = 50 = (Max + Min) / 2; e = -1 --> y = 25 %@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Und Invertierung wäre ja einfache Invertieren des Ausgangswerte ( y = -y).
Invertierung von Kp oder e.
@paul53 said in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
@mcm57 sagte: Die Begrenzung des Ausgangswertes auf Max bzw. Min erspart das jedenfalls nicht.
Das ist die Begrenzung des Ausgangswertes. Stellglieder haben einen begrenzten Stellbereich, meist 0 ... 100 %. Darauf bezieht sich das Proportionalband Xp.
Beispiel für P-Anteil: Xp = 4; Offset = 50 = (Max + Min) / 2; e = -1 --> y = 25 %@mcm57 sagte in Test neuer Adapter pid (pid-Regler) V0.0.1-alpha.x:
Und Invertierung wäre ja einfache Invertieren des Ausgangswerte ( y = -y).
Invertierung von Kp oder e.
OK nur die Formal an sich begrenzt da noch nicht.
act=0
soll=500
min=0
max=100
Xp=50Kp = (Max-Min)/Xp = (100-0)/50 = 2
e=act-soll = 500-0 = 500
u=Kp * e (bei I und D Anteil disabled) + offset = 500*2 + 50 = 1050.
Ergo muss da der Code noch auf 100 limitieren.Oder versteh ich das falsch?
Bei Xp 50 wäre eine maximale Differenz
von 25 im Regelbereich
u = Kp * e + offset = 25*2 +50 = 100Zusatzfrage(n):
Eine explizite Invertierungsmöglichkeit braucht man dann ja doch nicht. ein negativer Xp würde das ja dann auch tun wie du schreibst.Braucht dann noch wer den expliziten Parameter Offset? Ich meine ja, da ansonsten bei Abweichung 0 fix (Max-Min)/2 am Ausgang anstünde. Aber ev. will man da ja auch Min (z.B. 0) anliegen haben. Beispiel: Temperaturregler - bei passender Temperatur soll nicht geheizt werden.)
Entwicklung u Betreuung: envertech-pv, hoymiles-ms, ns-client, pid, snmp Adapter;
Support Repositoryverwaltung.Wer 'nen Kaffee spendieren will: https://paypal.me
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
470
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge