

CAN-BUS Interface ESP32 > MQTT und Stiebel Eltron WP steuern
-
@toller-tenya welche WP hast du??
@hugo1217 Ich habe eine Tecalor TTF 5 Eco Sole WP- Baugleich mit Stiebel Elton
Die Steuerung ist ein WPMiWIch habe nun CAN Speed von 5-100kbps ausprobiert aber es kommt nichts an außer dem Alive
Starte ich das Script im IOBroker mit Scan für 0x180 werden auch vermeintlich die CAN Telegramme versendet aber ohne Antwort.
Noch Ideen was ich überprüfen könnte?
Mein Sketch:
Mein Javascript
-
Guten morgen zusammen.
ich gehöre auch zu den Kollegen die nicht bereit sind so viel Geld für ein ISG zu bezahlen. Von daher verfolge ich seit längerem die Beiträge in Netz.
Ich möchte gerne meine LWZ 404Sol über den CAN-Bus auslesen. Später dann auch steuern...
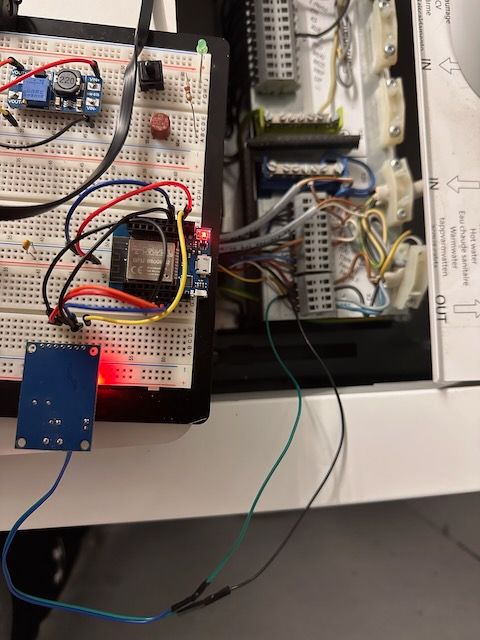
Als Hardware habe ich einen alten RPI3 genommen der vorhanden war und eine Waveshare 2-CH CAN HAT+ verbaut.
Die Hardware als solche funktioniert und ich kann über candump bzw. cansend Infos von Kanal0 zu 1 senden.
Danach habe ich jetzt ioBroker installiert und den Adapter CAN-Bus. dieser erkennt ebenfalls die CAN0 Schnittstelle und speichert brav die Infos von cansend in den objekten.
So weit so gut dachte ich und habe dann die LWZ mit dem Kanal0 verbunden. Leider kann ich hier keine Werte sehen oder empfangen. Habe mittlerweile neben H und L auch eine GND Leitung gelegt und mit verschiedenen Baudraten gespielt. Leider keine Infos auf dem Bus.Kann mir jemand einen Tipp geben was der nächste Schritt wäre um Infos auf dem Bus zu empfangen? Bisher habe ich noch kein Script oder ElsterTable oder ähnliches eingebunden.
Vielen lieben Dank für die Unterstützung,
Tom -
@randyandy sagte in CAN-BUS Interface ESP32 > MQTT und Stiebel Eltron WP steuern:
bei mir läuft der Sniffer nun seit ein paar Wochen. ICh denke ich habe ein ähnliches PRoblem wie Du und von Zeit zu Zeit hängt sich das System auf. Ich habe nun mal die Buffergröße verändert und (Daumen drücken) seit 2 Tagen alles ok. Hast Du das Problem gelöst ?
Die Buffergröße scheint es zu sein. Ich beobachte das nun noch ein wenig und dann poste ich mal meine Firmware.
Hier noch die letzte Firmware. Läuft nun seit Tagen ohne Probleme.
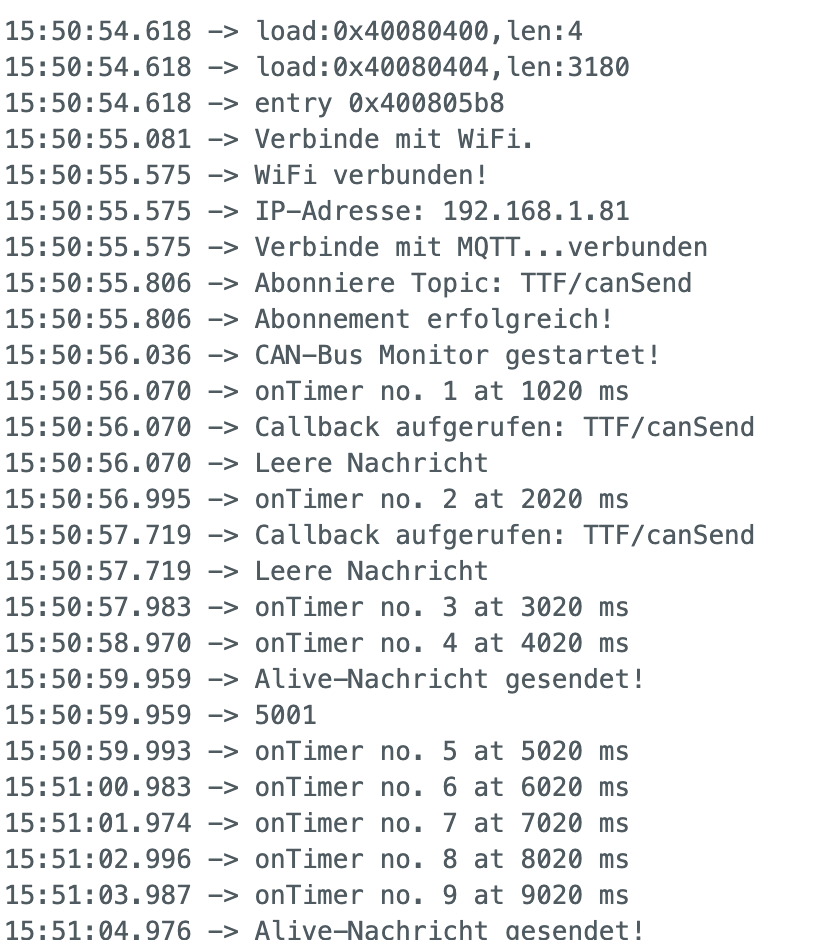
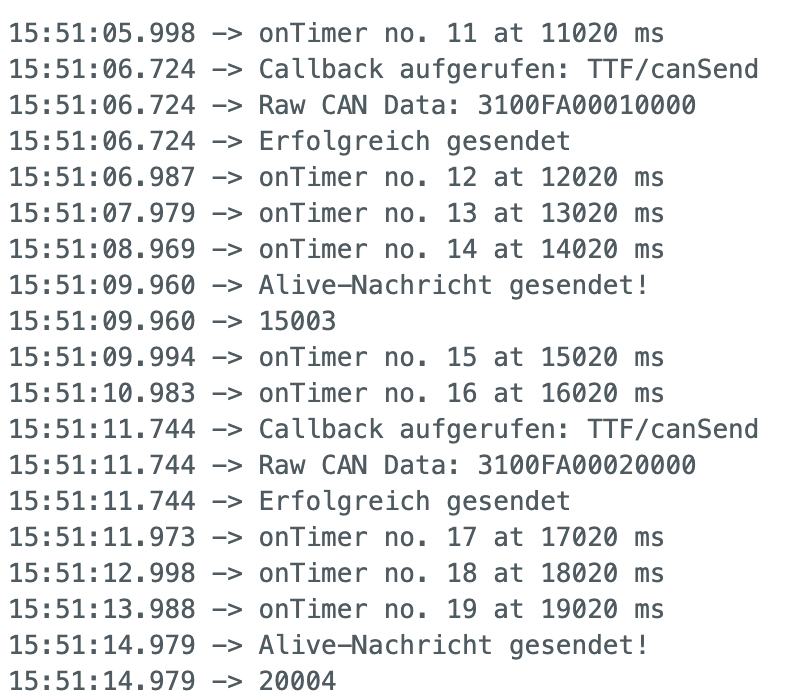
#include <Arduino.h> #include <mcp2515.h> #include <WiFi.h> #include <ArduinoOTA.h> #include <PubSubClient.h> #include <ArduinoJson.h> const char* ssid = "..."; // Ersetze mit deinem WiFi-Namen const char* password = "..."; // Ersetze mit deinem WiFi-Passwort const char* mqtt_server = "..."; // Dein MQTT Broker Server const int mqtt_port = ...; const char* mqtt_user = "..."; const char* mqtt_password = "..."; const char* mqtt_topic = "..."; void(* resetFunc) (void) = 0; // Timer declare hw_timer_t * timer = NULL; volatile SemaphoreHandle_t timerSemaphore; portMUX_TYPE timerMux = portMUX_INITIALIZER_UNLOCKED; volatile uint32_t isrCounter = 0; volatile uint32_t lastIsrAt = 0; void ARDUINO_ISR_ATTR onTimer(){ // Increment the counter and set the time of ISR portENTER_CRITICAL_ISR(&timerMux); isrCounter = isrCounter + 1; lastIsrAt = millis(); portEXIT_CRITICAL_ISR(&timerMux); // Give a semaphore that we can check in the loop xSemaphoreGiveFromISR(timerSemaphore, NULL); // It is safe to use digitalRead/Write here if you want to toggle an output } WiFiClient espClient; PubSubClient client(espClient); MCP2515 mcp2515(5); // Der CS-Pin muss entsprechend deiner Schaltung angepasst werden. // Diese Funktion wird aufgerufen, wenn eine Nachricht auf einem abonnierten Thema ankommt void callback(char* topic, byte* payload, unsigned int length) { Serial.println("Callback aufgerufen: " + String(topic)); char canSendTopic[128]; //War vorher 64 snprintf(canSendTopic, sizeof(canSendTopic), "%s/canRawGesendet", mqtt_topic); String topicString = String(topic); // Überprüfe, ob das Topic stimmt if (topicString.equals(String(mqtt_topic) + "/canSend")) { // Konvertiere payload in einen String zur Verarbeitung String payloadString; for (int i = 0; i < length; i++) { payloadString += (char)payload[i]; } if (length == 0 || payloadString == "0" || payloadString == "OK" || payloadString == "INIT" ) { Serial.println("Leere Nachricht "); return; } // Parse die JSON-Nachricht StaticJsonDocument<200> doc; DeserializationError error = deserializeJson(doc, payloadString); if (error || !doc.is<JsonObject>()) { Serial.println("Fehler beim Parsen von JSON"); client.publish(canSendTopic, ("JSON PARS ERROR: " + payloadString).c_str()); return; } String tempDataString = doc["Data"].as<String>(); // Konvertiert den Wert zu einem String tempDataString.replace(" ", ""); // Entfernt alle Leerzeichen doc["Data"] = tempDataString.c_str(); // Speichert den geänderten Wert zurück im JSON-Objekt // Extrahiere ID und Daten aus dem JSON const char* idString = doc["ID"]; const char* dataString = doc["Data"]; // Umwandeln der ID in einen Integer uint16_t id = strtol(idString, NULL, 16); // Umwandeln des Datenstrings in ein Byte-Array uint8_t data[10]; size_t dataLength = strlen(dataString) / 2; for (size_t i = 0; i < dataLength; i++) { char byteString[] = {dataString[i * 2], dataString[i * 2 + 1], 0}; data[i] = strtol(byteString, NULL, 16); } // Erstelle CAN-Nachricht und sende sie can_frame canMsg; canMsg.can_id = id; canMsg.can_dlc = dataLength; memcpy(canMsg.data, data, dataLength); // Erstelle einen String, um die Hex-Darstellung zu speichern char msgString[35]; // Länge = Anzahl der Bytes * 2 (für Hex) + 1 (für '\0') // Konvertiere jeden Byte der Daten in einen Hex-String for (int i = 0; i < canMsg.can_dlc; i++) { sprintf(&msgString[i * 2], "%02X", canMsg.data[i]); } // Sende CAN-Nachricht if (mcp2515.sendMessage(&canMsg) != MCP2515::ERROR_OK) { Serial.println("Fehler beim Senden der CAN-Nachricht"); client.loop(); delay(100); client.publish(canSendTopic, "SEND ERROR"); // Initialisiere den MCP2515 CAN Controller neu mcp2515.reset(); mcp2515.setBitrate(CAN_20KBPS, MCP_8MHZ); // Setze die Masken und Filter mcp2515.setFilterMask(MCP2515::MASK0, true, 0x000); // Maske 0 auf 0 setzen (alle Nachrichten akzeptieren) mcp2515.setFilterMask(MCP2515::MASK1, true, 0x000); // Maske 1 auf 0 setzen (alle Nachrichten akzeptieren) // Setze alle Filter auf 0, um alle Nachrichten zu akzeptieren //for (int filter = 0; filter < 6; filter++) { //mcp2515.setFilter((MCP2515::RXF)filter, true, 0x000); //} mcp2515.setNormalMode(); } else { // Gib den Hex-String aus Serial.print("Raw CAN Data: "); Serial.println(msgString); client.publish(canSendTopic, msgString); // Sende die Daten zum MQTT-Broker client.loop(); Serial.println("Erfolgreich gesendet"); client.publish(topicString.c_str(), "OK", false); } } else { Serial.println("Falsches Topic"); return; } } void setup() { // Timer Setup timerSemaphore = xSemaphoreCreateBinary(); // Create semaphore to inform us when the timer has fired timer = timerBegin(1000000); // Set timer frequency to 1Mhz = 1µs timerAttachInterrupt(timer, &onTimer); // Attach onTimer function to our timer. timerAlarm(timer, 1000000, true, 0); // Set alarm to call onTimer function every second (value in microseconds). Repeat the alarm (third parameter) with unlimited count = 0 (fourth parameter). // Initialisiere die serielle Kommunikation Serial.begin(115200); pinMode(2, OUTPUT); // Setze GPIO 26 als Ausgang für die LED // Warte auf die serielle Verbindung, falls nötig while (!Serial) { ; // warte auf die Verbindung der seriellen Schnittstelle } // Verbinde mit WiFi-Netzwerk WiFi.begin(ssid, password); Serial.print("Verbinde mit WiFi"); while (WiFi.status() != WL_CONNECTED) { delay(500); Serial.print("."); } Serial.println("\nWiFi verbunden!"); Serial.print("IP-Adresse: "); Serial.println(WiFi.localIP()); connectMQTT(); // Initialisiere den MCP2515 CAN Controller mcp2515.reset(); mcp2515.setBitrate(CAN_20KBPS, MCP_8MHZ); // Setze die Masken und Filter mcp2515.setFilterMask(MCP2515::MASK0, true, 0x000); // Maske 0 auf 0 setzen (alle Nachrichten akzeptieren) mcp2515.setFilterMask(MCP2515::MASK1, true, 0x000); // Maske 1 auf 0 setzen (alle Nachrichten akzeptieren) // Setze alle Filter auf 0, um alle Nachrichten zu akzeptieren //for (int filter = 0; filter < 6; filter++) { //mcp2515.setFilter((MCP2515::RXF)filter, true, 0x000); //} mcp2515.setNormalMode(); Serial.println("CAN-Bus Monitor gestartet!"); //Starte OTA ArduinoOTA.setHostname("esp32-ota"); ArduinoOTA.setPassword("..."); //Hier das Passowrd für OTA setzen ArduinoOTA.onStart([]() { String type; if (ArduinoOTA.getCommand() == U_FLASH) { type = "sketch"; } else { // U_SPIFFS type = "filesystem"; } // Hinweis: if updating SPIFFS this would be the place to unmount SPIFFS using SPIFFS.end() Serial.println("Start updating " + type); }); ArduinoOTA.onEnd([]() { Serial.println("\nEnd"); }); ArduinoOTA.onProgress([](unsigned int progress, unsigned int total) { Serial.printf("Progress: %u%%\r", (progress / (total / 100))); }); ArduinoOTA.onError([](ota_error_t error) { Serial.printf("Error[%u]: ", error); if (error == OTA_AUTH_ERROR) { Serial.println("Auth Failed"); } else if (error == OTA_BEGIN_ERROR) { Serial.println("Begin Failed"); } else if (error == OTA_CONNECT_ERROR) { Serial.println("Connect Failed"); } else if (error == OTA_RECEIVE_ERROR) { Serial.println("Receive Failed"); } else if (error == OTA_END_ERROR) { Serial.println("End Failed"); } }); ArduinoOTA.begin(); } void loop() { static unsigned long lastMillis = 0; char aliveTopic[64]; char timestampString[32]; // Genug Platz für die Darstellung des Zeitstempels connectMQTT(); if (xSemaphoreTake(timerSemaphore, 0) == pdTRUE){ uint32_t isrCount = 0, isrTime = 0; // Read the interrupt count and time portENTER_CRITICAL(&timerMux); isrCount = isrCounter; isrTime = lastIsrAt; portEXIT_CRITICAL(&timerMux); // Print it Serial.print("onTimer no. "); Serial.print(isrCount); Serial.print(" at "); Serial.print(isrTime); Serial.println(" ms"); if (isrTime > 1000 * 60 * 60 * 12) { resetFunc(); } } // Sende alle 5 Sekunden eine Nachricht an das Thema "alive" if (millis() - lastMillis > 5000) { lastMillis = millis(); snprintf(aliveTopic, sizeof(aliveTopic), "%s/alive", mqtt_topic); // Kombiniere das Hauptthema mit "/alive" snprintf(timestampString, sizeof(timestampString), "%lu", millis()); // Konvertiere den Zeitstempel in einen String client.publish(aliveTopic, timestampString); // Sende das Zeichen "!" an das Unterthema "alive" Serial.println("Alive-Nachricht gesendet!"); digitalWrite(2, HIGH); // LED einschalten //delay(10); // Kurz warten digitalWrite(2, LOW); // LED ausschalten Serial.println(timestampString); } can_frame canMsg; if (mcp2515.readMessage(&canMsg) == MCP2515::ERROR_OK) { digitalWrite(2, HIGH); // LED einschalten delay(100); // Kurz warten digitalWrite(2, LOW); // LED ausschalten char msgString[128]; // Ein Array, um die Daten zu speichern sprintf(msgString, "{\"ID\": \"0x%03X\", \"Len\": \"%1d\", \"Data\": \"", canMsg.can_id, canMsg.can_dlc); for (int i = 0; i < canMsg.can_dlc; i++) { sprintf(msgString + strlen(msgString), "%02X ", canMsg.data[i]); } sprintf(msgString + strlen(msgString) - 1, "\"}"); snprintf(aliveTopic, sizeof(aliveTopic), "%s/pload", mqtt_topic); // Kombiniere das Hauptthema mit "/alive" client.publish(aliveTopic, msgString); // Sende die Daten zum MQTT-Broker Serial.println(msgString); } // Kurze Verzögerung, um den CAN-Bus nicht zu überlasten //Serial.print("."); //delay(10); ArduinoOTA.handle(); client.loop(); } void connectMQTT() { // Verbinde mit MQTT Broker while (!client.connected()) { client.setServer(mqtt_server, mqtt_port); Serial.print("Verbinde mit MQTT..."); if (client.connect("CAN_MQTT_Client", mqtt_user, mqtt_password)) { Serial.println("verbunden"); // Setze MQTT-Callback-Funktion client.setCallback(callback); // Erstelle das Topic für das Senden von CAN-Nachrichten char canSendTopic[64]; snprintf(canSendTopic, sizeof(canSendTopic), "%s/canSend", mqtt_topic); client.publish(canSendTopic, "INIT"); // Sende die Daten zum MQTT-Broker delay(200); Serial.print("Abonniere Topic: "); Serial.println(canSendTopic); if (client.subscribe(canSendTopic)) { Serial.println("Abonnement erfolgreich!"); } else { Serial.println("Abonnement fehlgeschlagen!"); } delay(200); } else { Serial.print("Fehler, rc="); Serial.print(client.state()); Serial.println(" Versuche es erneut in 5 Sekunden"); delay(5000); } } };Ich habe im Übrigen noch einen timer eingebaut, der nach 12 Stunden den ESP32 resettet.
War die Übergangslösung die aber keine war. Ich gehe davon aus, dass man dies abschalten kann.
Auf der anderen Seite ein Softreset alle 12 Stunden kann nicht schaden.Was aber bleibt ist die Fehlermeldungen im Javascript (füllen halt das log, aber das Skript läuft prinzipiell). Ich bin mir sicher, dass es sich dabei um ein nicht definiertes Objekt handelt. Ich find aber leider nicht in welchem Bereich der Fehler ausgelöst wird. Da ich nun nicht wirklich der Javaskript Guru bin vielleicht kann sich das ein Experte mal ansehen.
@randyandy
Hi RandyAndy, dein Script läuft super bei unserer TTL 23 cool. Welche Fehler bekommst du denn? -
Guten morgen zusammen.
ich gehöre auch zu den Kollegen die nicht bereit sind so viel Geld für ein ISG zu bezahlen. Von daher verfolge ich seit längerem die Beiträge in Netz.
Ich möchte gerne meine LWZ 404Sol über den CAN-Bus auslesen. Später dann auch steuern...
Als Hardware habe ich einen alten RPI3 genommen der vorhanden war und eine Waveshare 2-CH CAN HAT+ verbaut.
Die Hardware als solche funktioniert und ich kann über candump bzw. cansend Infos von Kanal0 zu 1 senden.
Danach habe ich jetzt ioBroker installiert und den Adapter CAN-Bus. dieser erkennt ebenfalls die CAN0 Schnittstelle und speichert brav die Infos von cansend in den objekten.
So weit so gut dachte ich und habe dann die LWZ mit dem Kanal0 verbunden. Leider kann ich hier keine Werte sehen oder empfangen. Habe mittlerweile neben H und L auch eine GND Leitung gelegt und mit verschiedenen Baudraten gespielt. Leider keine Infos auf dem Bus.Kann mir jemand einen Tipp geben was der nächste Schritt wäre um Infos auf dem Bus zu empfangen? Bisher habe ich noch kein Script oder ElsterTable oder ähnliches eingebunden.
Vielen lieben Dank für die Unterstützung,
Tom -
Danke für all die Infos hier. Ich werde das demnächst probieren mit ESP und MCP2515 shield.
Ich frage mich, hat es jemand mit einem ESP8266 probiert? Die mag ich lieber, weil ich einige im Haus im Einsatz habe und die doch ein bisschen weniger Strom verbrauchen. Macht natürlich nicht die Welt aus, aber andererseits, die Arbeit übernimmt ja großteils der MCP2515, für MQTT ist ein ESP8266 leicht gut genug. Übersehe ich was?
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden256
Online33.0k
Benutzer83.3k
Themen1.3m
Beiträge