

ZWAVE Signale kommen nicht am Aktor an


-
Bei mir lief die Installation in etwa so ab und war ne Sache von 2 Minuten:
Fibaro einbinden, Fibaro konfigurieren, Fibaro kalibrieren, fertig.
Von daher wird bei deinen Problemen irgendwas im Argen sein.
Muss ich händisch über einen github-link updaten? `
Könntest du mal probieren. In der Adapterliste auf das Github-Icon und dort zwave auswählen. Sollte dich auf v0.8 bringen, die 0.4.4 ist schon etwas älter.Wenn das auch nicht hilft, würde ich deine Geräte mal zurücksetzen. Oder hast du mehr Geräte als den Fibaro? Dann ist das recht aufwändig.
=> Fibaro exkludieren (Adapter-Menü)
=> Hard-Reset des Controllers (Adapter-Menü)
=> Hard-Reset des Fibaro (siehe Anleitung)
=> Fibaro neu inkludieren
-
Warum wird denn bei mir als aktuellstee Version die 0.4.4. angezeigt, wenn es doch schon die 0.7 `
Welches Repository hast du ausgewählt?http://forum.iobroker.net/viewtopic.php?f=17&t=7071&p=73654&hilit=Repositories#p73654
Vermutlich ist das auch der Grund, warum die Versionsnummer gelb und nicht grün hinterlegt ist….. `
Nein, die Farbe gibt fen Entwicklungsstand an.http://www.iobroker.net/docu/?page_id=5379&lang=de#4_Version
Gruß
Rainer
-
Danke für die Tipps bezüglich Versionsstände.
Mein Update lief durch…jetzt bin ich bei 0.8.
Leider gleiches Verhalten. Ich fürchte, ich muss alles nochmal zurücksetzen. Momentan ist es ja noch ein sehr beschränktes Testszenario mit Host + Fibaro.
-
So, habe nun alles mal resettet und neu angelernt. Danach habe ich den Fibaro wieder eingebunden.
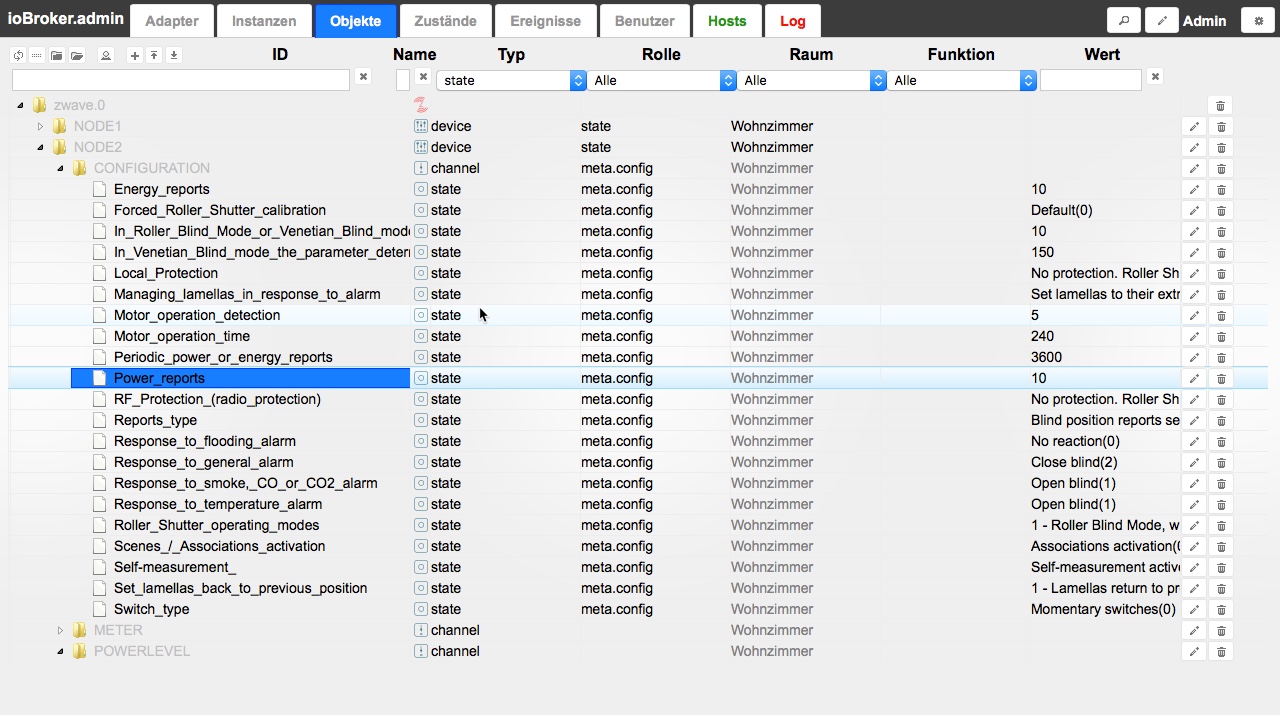
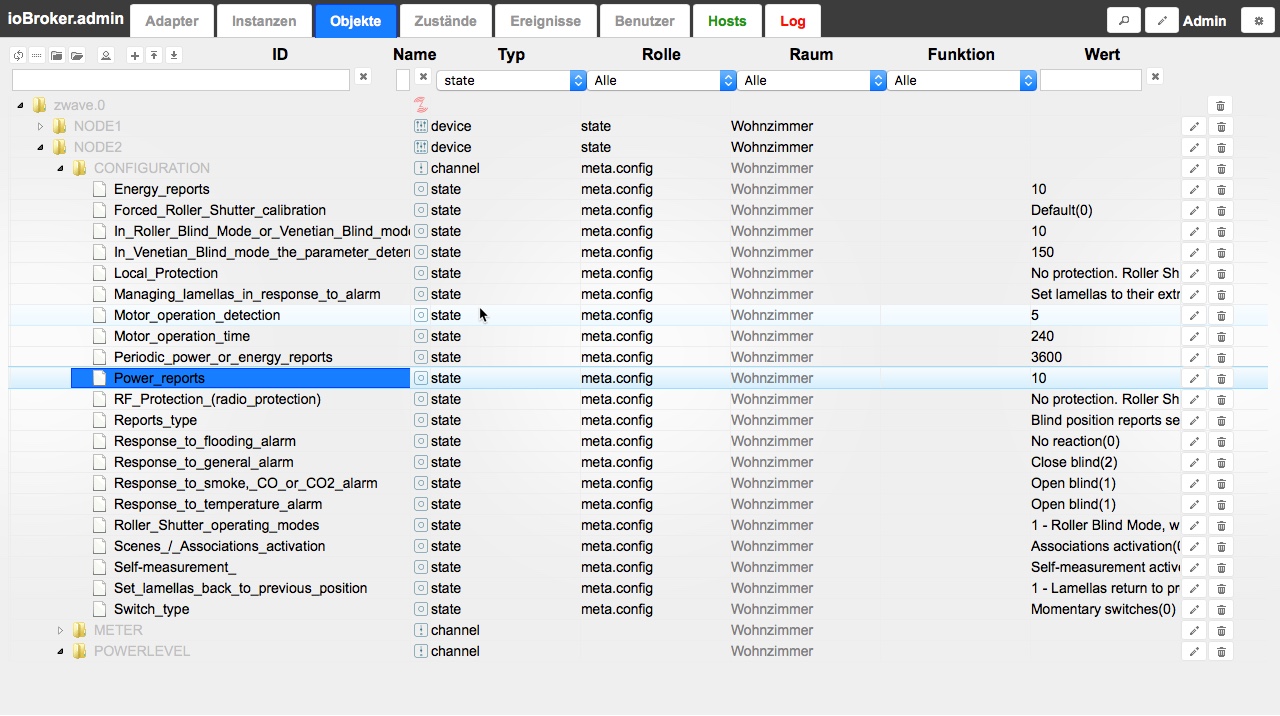
Die Kalibrierung lief erst los, nachdem ich Motor_Operation_Detection von 10 auf 5 reduziert habe. Der Rolladen fuhr dabei 3 komplette Wege. Nun ist er ganz unten und Level_1 steht auf 99.
Local_Protection = off, Shutter_Operating_Moder = Roller_Blind_mode_with_Positioning, Switch_Type = Momentary Switch.
Soweit so gut, amateurhaft würde ich sagen: "Sollte jetzt tun"….tut's aber nicht.
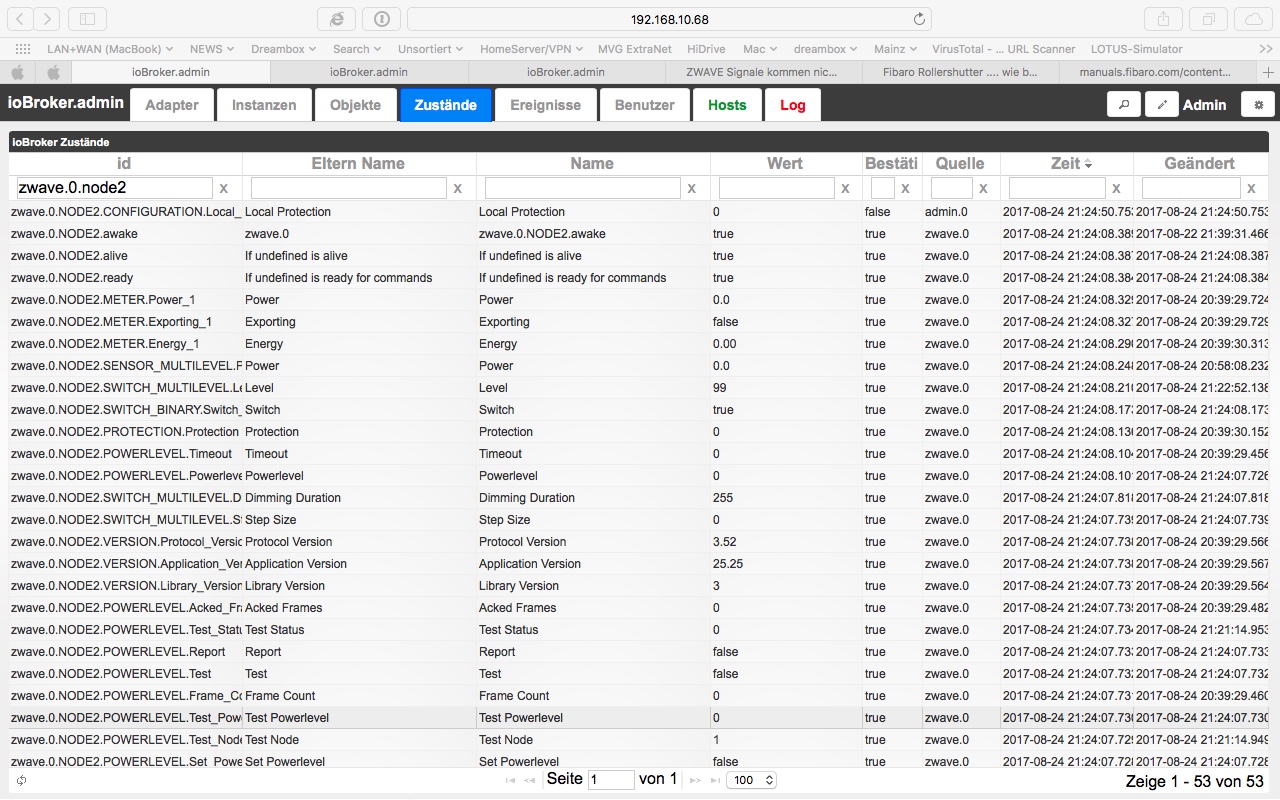
Die Verbindung zum Fibaro scheint nun auch soweit zu stehen, denn wenn ich den Level_1 ändere, dann klackert der Aktor. Gleiches passiert, wenn ich auf den Schalter die hoch oder runter - Taste drücke. Der Aktor klackert und es leuchtet kurz eine rote bzw. eine grüne Diode...nur bewegen tut sich der Rolladen nicht. Der Wert Level_1 ändert sich auch nicht dauerhaft, denn offenbar meldet der Aktor immer wieder die 99 an die Basis zurück. Ich hatte ja schon gedacht, dass vielleicht hoch/runter vertauscht ist, aber die Kalibrierung läuft ja und ich würde mutmaßen, dass dann einfach nicht 99 = Rolladen unten (wie bei mir) sondern 0 = unten wäre.
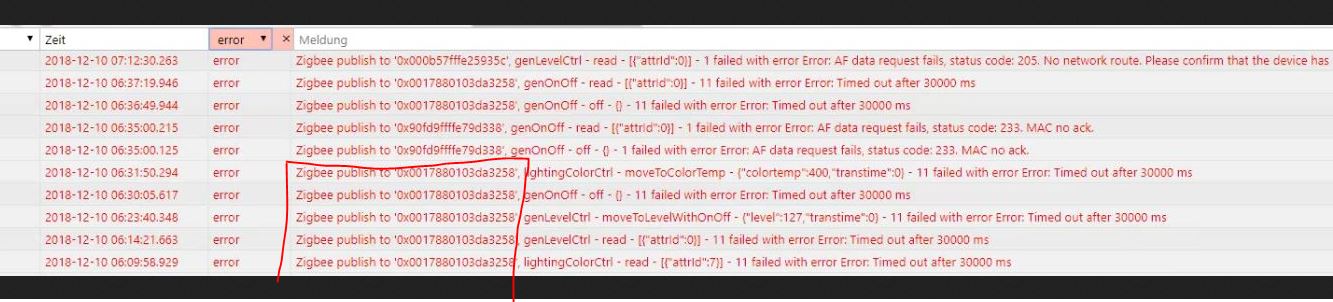
Was mich irritiert ist, dass keine Stromdaten an der Basis ankommen.
Mittlerweile bin ich dann doch etwas ratlos und rufe nochmal um Hilfe. Ich füge mal eine umfassende Doku an.
3359_io00.jpg
3359_io01.jpg
3359_io02.jpg
3359_io03.jpg
3359_io04.jpg
3359_io05.jpg
3359_io06.jpg
3359_io07.jpg -
-
Was genau meinst Du damit?
Ich habe den Fibaro resettet und wieder eingebunden. Dann habe ich den B-Button gedrückt bis er blau war und nochmal kurz gedrückt. Dann ist der Rolladen 3 volle Strecken gelaufen.
Meinst Du das?
Muss ich sonstwo noch kalibrieren? Ich lese gerade in Deiner Frage "vor" der Verknüpfung? Habe ich die falsche Reihenfolge gewählt?
-
Unabhängig von der Anbindung sollte bei Tastendruck das Rollo hoch oder runter fahren.
Hast du nen Trennrelais drin oder ist der Motor direkt am Fibaro angeklemmt?
-
Vielleicht habe ichs überlesen… Schalter oder Taster? Schellenberg hatte doch Schalter?!
-
-
Bin nicht sicher ob deine einstellung bei switch_type stimmt.
Die uhr kenne ich nicht. Man müsste mal die ausgänge messen.
-
Ok, werd ich nachher probieren.
Das ist übrigens der Motor:
http://www.schellenberg.de/rollladenant … 20710.html
Sie nennen die Endlageneinstellung elektronisch, tatsächlich findet sie aber am Motor statt und wird auch im Motor gespeichert - nur eben komfortabel per Knopf statt per Stellrad.
Wie gesagt: die Kalibrierung, die ich vom Fibaro aus gestartet, ist ja durchgelaufen. Also grundsätzlich kann der fibaro ja den Motor sauber steuern. Aber zur Sicherheit nochmal die Frage: Muss die Kalibrierung des fibaros VOR oder NACH dem Einbinden ins zwave geschehen oder ist es egal? Ich habe zuerst eingebunden und dann kalibriert.
-
Sie nennen die Endlageneinstellung elektronisch, tatsächlich findet sie aber am Motor statt und wird auch im Motor gespeichert - nur eben komfortabel per Knopf statt per Stellrad. `
Bei meinen SELVE-Motoren wurde das mit einem Einstellkabel gemacht, aber das sollte das gleiche sein.Muss die Kalibrierung des fibaros VOR oder NACH dem Einbinden ins zwave geschehen oder ist es egal? Ich habe zuerst eingebunden und dann kalibriert. `
So habe ich es auch gemacht und dann lief es. Kannst du die Kalibrierung aus ioBroker anstoßen oder geht das auch nicht? Bzw. wird überhaupt irgendeine Einstellung übernommen?Mach doch zur Sicherheit nochmal ein Foto von deiner Verkabelung, vielleicht stimmt ja doch was nicht.
-
Ich bin grad völlig irritiert:
Gestern hat sich nichts gemuckst. Heute drücke ich auf Close und der Rolladen geht hoch; Open und er geht hoch.
Das ging aber nur 2-3 mal danach wieder nicht. Also scheint es wirklich grundsätzlich zu gehen, aber die hoch-runter-Kabel sind schonmal vertausch….Kinderkram
Ich habe nun peu a peu die Motor_Operation_Detection gesenkt und beim Wert "1" angekommen, funktioniert das hoch-runter (wenn auch noch vertauscht) stabil. Auch über den Schalter kann ich den Rolladen nun triggern. Das geht zwar nicht so präzise, als wäre der Motor direkt am Schalter, aber was soll's. Ich wundere mich nur, denn ich war schon mal bei der Motor_Operation weit runter gegangen und da hat's nicht funktioniert.
Bevor ich's vergesse und weiter Fragen stelle: VIELEN DANK FÜR EURE HILFE UND EURE GEDULD !!!!! Dieses Forum ist ein echter Lichtblick.
So, um die Sache nun zu vervollständigen:
Die Positionierung ist noch sehr unzuverlässig:
Ich wähle 50....er fährt bis zu einem viertel runter. Ich wähle 25, er fährt nur 5cm hoch. Ich wähle 1....er fährt nur wieder ein kleines Stück hoch. Bei 0 fährt er dann erst den ganzen Rest hoch.
Ist das etwas, was ich justieren kann...ich habe schon an den Parametern rumgespielt, bin aber nicht so ganz an's Ziel gekommen damit - oder ist das einfach so, weil's ja eben kein Motor mit echter Positionierung ist.
-
Die Positionierung ist noch sehr unzuverlässig:
Ich wähle 50….er fährt bis zu einem viertel runter. Ich wähle 25, er fährt nur 5cm hoch. Ich wähle 1....er fährt nur wieder ein kleines Stück hoch. Bei 0 fährt er dann erst den ganzen Rest hoch. `
Die ganze Positionierung ist bei mir auch recht nichtlinear (50 = 1/3 offen, nach unten wirds noch enger in der Abstufung). Ich erkläre mir das so, dass der Fibaro nach dem Motorwinkel geht. Und da nach unten weniger Rollladen aufgewickelt ist, sorgt der gleiche Winkel für weniger Vorschub.Ist das etwas, was ich justieren kann `
Ich habe einen Mini-Adapter in Planung (bin noch nicht zum Programmieren gekommen), der nichts anderes machen soll, als die States von Zwave-Geräten leichter verdaulich zu machen. Ein Anbindungsfall ist Alexa, die mit dem unterbrochenen Wertebereich (0-99, 255) überfordert ist. In dem Zuge könnte man auch die nichtlineare Positionierung gerade biegen. -
ich würde behaupten der fibaro rechnet immer rum..
von edpunkt 0 strom zum endpunkt 0 strom und die zeit dazwichen..dehalb der Initialisierunglauf
ich habe Schellenberg Rohrmotoren mit manueller Endpositionierung (per Stellschraube)
50% ist halt 50% bei der Positionierung.. genau wie 5% oder 78% ..
-
Willst du damit sagen, dass die Positionsgenauigkeit mit jedem Lauf zunimmt? D.h., der viel fibaro lernt? `
nein ..ich meine bei der Kalibrierung/Initialisierungslauf wird wohl was gemessen (Zeit, Strom was weiss ich)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden347
Online32.8k
Benutzer82.7k
Themen1.3m
Beiträge