

IRobot Roomba Adapter
-
Hallo zusammen
Erstmals Danke für den Adapter. Funktioniert sehr gut.
Ich habe jedoch ein kleines Problem, mit dem iRobot i7 +.Den Roboter lasse ich per Zeitplan über iOBroker starten, damit ich den Zeitplan per VIS An- und Abschalten, so wie editieren kann.
Dies bringt jedoch das Problem mit sich, dass sich der Behälter nicht automatisch leert, wenn er voll ist (i7+ hat einen externen Abfallbehälter). Wenn der Roboter jedoch per "normalem" iRobot App-Zeitplan gestartet wird, dann geht das.Nun habe ich 2 Fragen dazu:
- Ist es möglich im Adapter den Befehl zu senden, dass sich der Behälter leeren soll? Somit könnte ich einfach die Funktion einbauen:
Wenn Behälter voll UND Roboter an Dockingstation = leere Behälter.
ODER
- Wie kann ich den Zeitplan über den Adapter auslesen und ändern, damit ich dies weiterhin über VIS einstellen kann, jedoch der Roboter mit dem "normalen" Zeitplan startet?
P.S. Es gibt ja das RunCommand Objekt. Beim Objekt steht, dass eine Liste unter https://bit.ly/2S57cgM zu finden ist. Dort wurde ja aber auch nur die Standardfunktionen wie Start, Stop, etc. abgebildet.
- Ist es möglich im Adapter den Befehl zu senden, dass sich der Behälter leeren soll? Somit könnte ich einfach die Funktion einbauen:
-
Hallo zusammen
Erstmals Danke für den Adapter. Funktioniert sehr gut.
Ich habe jedoch ein kleines Problem, mit dem iRobot i7 +.Den Roboter lasse ich per Zeitplan über iOBroker starten, damit ich den Zeitplan per VIS An- und Abschalten, so wie editieren kann.
Dies bringt jedoch das Problem mit sich, dass sich der Behälter nicht automatisch leert, wenn er voll ist (i7+ hat einen externen Abfallbehälter). Wenn der Roboter jedoch per "normalem" iRobot App-Zeitplan gestartet wird, dann geht das.Nun habe ich 2 Fragen dazu:
- Ist es möglich im Adapter den Befehl zu senden, dass sich der Behälter leeren soll? Somit könnte ich einfach die Funktion einbauen:
Wenn Behälter voll UND Roboter an Dockingstation = leere Behälter.
ODER
- Wie kann ich den Zeitplan über den Adapter auslesen und ändern, damit ich dies weiterhin über VIS einstellen kann, jedoch der Roboter mit dem "normalen" Zeitplan startet?
P.S. Es gibt ja das RunCommand Objekt. Beim Objekt steht, dass eine Liste unter https://bit.ly/2S57cgM zu finden ist. Dort wurde ja aber auch nur die Standardfunktionen wie Start, Stop, etc. abgebildet.
@wizzardking den Zeitplan findest du bereits in den States (unter
missions.schedule). Bzgl. des Befehls schau mal die Issues (auch die geschlossenen) von dorita durch (siehe https://github.com/koalazak/dorita980/issues), ob du dort etwas zu i7 findest. - Ist es möglich im Adapter den Befehl zu senden, dass sich der Behälter leeren soll? Somit könnte ich einfach die Funktion einbauen:
-
Hallo zusammen
Ist es möglich, dass via ioBroker auch nur ein bestimmter Raum gereinigt werden soll?
Gerne würde ich dann auch mehrere Räume zu einer Zone/Start zusammenschliessen.
Die Räume sind bereits in der Roomba-App vorhanden.Vielen Dank für eure Hilfe.
Gruss Kusi
-
Hallo zusammen
Ist es möglich, dass via ioBroker auch nur ein bestimmter Raum gereinigt werden soll?
Gerne würde ich dann auch mehrere Räume zu einer Zone/Start zusammenschliessen.
Die Räume sind bereits in der Roomba-App vorhanden.Vielen Dank für eure Hilfe.
Gruss Kusi
@Kusi Ist nicht direkt implementiert. Es müsste ein
commandstate geben, mit dem du das realisieren kannst.{ command: 'CleanRoom', time: 0, initiator: 'localApp' }Ich habe keinen Roomba mehr und kann es daher nicht probieren. Probier etwas mit den Werten zu spielen, wenn es nicht geht.
-
@Kusi Ist nicht direkt implementiert. Es müsste ein
commandstate geben, mit dem du das realisieren kannst.{ command: 'CleanRoom', time: 0, initiator: 'localApp' }Ich habe keinen Roomba mehr und kann es daher nicht probieren. Probier etwas mit den Werten zu spielen, wenn es nicht geht.
-
Mal eine Frage an alle - habt ihr z.Zt. auch Probleme, das sich Roomba nicht mehr mit der Werkscloud verbindet?
Ich hatte nie Probleme damit, doch seit Montag ist mir aufgefallen, das so gut wie keine Verbindung mehr zustande kommt.
Die nächste Frage geht an @Zefau : Wurde irgend etwas bei den History Daten geändert?
Der Datenpunkt
roomba.0.missions.historyspuckt ja eine json Tabelle aus. Im VIS eingebunden sieht diese dann so aus.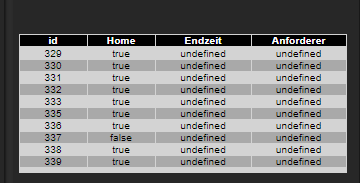
Interessanter Weise scheint die sich nicht mehr zu aktualisieren, denn die History Tabelle vom Roomba selber schaut so aus.
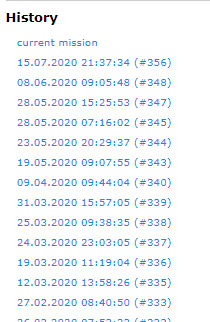
Während die json Tabelle bei 339 endet, geht die Roomba Tabelle bis 356 (die fehlenden Nummer bitte ignorieren, da habe ich was ausprobiert und canvas lief nicht)
-
@Zefau Danke, könntest du mir dies bitte ein bisschen genauer erklären, wie ich dies beim genannten Objekt eintragen muss? Ich habe es heute probiert, jedoch nicht hinbekommen.
Muss das gesamte Wort "CleanRoom" durch den Raumnamen ersetzt werden?
-
der adapter soll ja auf dorita980 basieren, und im git dazu steht "Compatible robots: all 600, 800, 900, e5 and i7/i7+ series with HOME app and Braava m6."
ich hab nun mal meinen m6 über den adapter verbunden und es funktioniert auch alles (was ich benötige und getestet habe)
das einzige was etwas störend ist das nun regelmässig fehler vom adapter im log auftauchen :(unifi.0 2020-07-19 07:47:38.776 info (2130) Update done roomba.0 2020-07-19 07:47:28.294 error (1876) "Cannot read property 'toString' of null" roomba.0 2020-07-19 07:47:28.292 error (1876) "Cannot read property 'toString' of null" unifi.0 2020-07-19 07:46:38.889 info (2130) Update done roomba.0 2020-07-19 07:46:20.500 error (1876) "Cannot read property 'toString' of null" roomba.0 2020-07-19 07:46:20.497 error (1876) "Cannot read property 'toString' of null" unifi.0 2020-07-19 07:45:38.881 info (2130) Update done roomba.0 2020-07-19 07:45:18.102 error (1876) "Cannot read property 'toString' of null" roomba.0 2020-07-19 07:45:18.100 error (1876) "Cannot read property 'toString' of null"wie kann ich helfen den fehler auf die spur zu kommen?
danke im voraus. -
@wizzardking den Zeitplan findest du bereits in den States (unter
missions.schedule). Bzgl. des Befehls schau mal die Issues (auch die geschlossenen) von dorita durch (siehe https://github.com/koalazak/dorita980/issues), ob du dort etwas zu i7 findest.@Zefau said in IRobot Roomba Adapter:
missions.schedule
Hallo Zefau
Vielen Dank für Deine Antwort.
Leider sehe ich nur beim älteren iRobot Modell den Zeitplan. Beim i7 sehe ich unter "Missions" leider nur den Ordner "current".Den Zeitplan müsste man aber ja auch durch das objekt _runCommand auslesen und setzen können.
Ich verstehe hier aber die Anleitung nicht ganz.
Wenn ich "myRobot.getWeek()" im Objekt _runCommand eingebe, würde ich erwarten, dass der aktuelle Zeitplan in den Logs ausgegeben wird, tatsächlich passiert aber nichts. -
@Zefau said in IRobot Roomba Adapter:
missions.schedule
Hallo Zefau
Vielen Dank für Deine Antwort.
Leider sehe ich nur beim älteren iRobot Modell den Zeitplan. Beim i7 sehe ich unter "Missions" leider nur den Ordner "current".Den Zeitplan müsste man aber ja auch durch das objekt _runCommand auslesen und setzen können.
Ich verstehe hier aber die Anleitung nicht ganz.
Wenn ich "myRobot.getWeek()" im Objekt _runCommand eingebe, würde ich erwarten, dass der aktuelle Zeitplan in den Logs ausgegeben wird, tatsächlich passiert aber nichts.@wizzardking bitte beachtet, dass ich keinen Roomba mehr habe und daher nur noch sehr begrenzt support leisten kann.
Ich habe
runCommandnie selbst ausprobiert. Das Format müsste aber wie folgt sein{ "command": "start", "time": 1579465092, "initiator": "localApp" } -
Disregard.
-
Hi zusammen,
ich habe einen s9 und habe mir den Roomba Adapter im IOBroker installiert.
Die Kommandos unter .commands wie Start, Stop ... funktionieren gut.
Jedoch wundert es mich das keine Bereichsreinigung möglich ist, also habe ich mich an '_runCommand' gemacht.
Egal was ich dort übergebe ich bekomme so gar kein Feedback, also keinen Fehler und nix.Ich hätte gedacht das dieses Kommando das richtige sei:
'{"command" : "cleanroom","ordered": 1,"pmap_id": "meine id","regions": [{ "region_id": "12"},{ "region_id": "13"}],"user_pmapv_id": "meine id"}'Ich habe auch leider kein Erfolg gehabt dorita980 in einem Skript zu verwenden:
var dorita980 = require('dorita980'); var robi= new dorita980.Local('???', ':1:1596011664:??', '172.xx.xx.xx'); robi.on('connect', init); function init () { if (robi) { log("init"); robi.getRobotState(['lastCommand']).then((actualState) => { log(actualState); }); } }Kann mir jemand damit bitte helfen, hat das schon mal jemand im IOBroker gemacht ?
-
Hi zusammen,
ich habe einen s9 und habe mir den Roomba Adapter im IOBroker installiert.
Die Kommandos unter .commands wie Start, Stop ... funktionieren gut.
Jedoch wundert es mich das keine Bereichsreinigung möglich ist, also habe ich mich an '_runCommand' gemacht.
Egal was ich dort übergebe ich bekomme so gar kein Feedback, also keinen Fehler und nix.Ich hätte gedacht das dieses Kommando das richtige sei:
'{"command" : "cleanroom","ordered": 1,"pmap_id": "meine id","regions": [{ "region_id": "12"},{ "region_id": "13"}],"user_pmapv_id": "meine id"}'Ich habe auch leider kein Erfolg gehabt dorita980 in einem Skript zu verwenden:
var dorita980 = require('dorita980'); var robi= new dorita980.Local('???', ':1:1596011664:??', '172.xx.xx.xx'); robi.on('connect', init); function init () { if (robi) { log("init"); robi.getRobotState(['lastCommand']).then((actualState) => { log(actualState); }); } }Kann mir jemand damit bitte helfen, hat das schon mal jemand im IOBroker gemacht ?
Hallo zusammen, hallo @Zefau ,
ich habe mal ein wenig Recherche betrieben. Ich finde Deinen Adapter super und würde gerne die Node _runCommand benutzen.
Jedoch tut sich beim Benutzen dieser so garnichts.
So wie ich Deinen Code verstehe (roomba.js) Zeile 151// run command else if (action == '_runCommand' && state.ack !== true) { let command = { command: state.val, time: Date.now() / 1000 | 0, initiator: 'localApp' }; robot.publish('cmd', JSON.stringify(command), () => { adapter.log.info('Ran command ' + state.val + '!'); }); }läßt Du dort nur ein Kommando wir 'start' o.ä., ohne Parameter zu, da der eigentliche Commandstring erst via stringify erzeugt wird.
Also möchte ich ein Command wie (btw: Dieses Command funktioniert wenn ich eine Verbindung zum s9 via MQTT Explorer aufbaue){ "command": "start", "ordered": 1, "params": { "carpetBoost": false, "noAutoPasses": false, "twoPass": false, "vacHigh": false }, "pmap_id": "???", "regions": [ { "region_id": "12", "type": "rid" } ], "user_pmapv_id": "???" }los schicken, wird folgendes in die Methode publish geschickt:
{ command: { "command": "start", "ordered": 1, "params": { "carpetBoost": false, "noAutoPasses": false, "twoPass": false, "vacHigh": false }, "pmap_id": "???", "regions": [ { "region_id": "12", "type": "rid" } ], "user_pmapv_id": "???" }, time: Date.now() / 1000 | 0, initiator: 'localApp' }... und das dürfte einen Fehler produzieren.
Ich möchte Dir nicht vorgreifen, jedoch sollte der case für _runCommand nicht so aussehen ?// run command else if (action == '_runCommand' && state.ack !== true) { robot.publish('cmd', state.val, () => { adapter.log.info('Ran command ' + state.val + '!'); }); }Edit: Ich habe gerade meine lokale roomba.js dahingehend geändert. Ich denke der Case wird nicht angesprungen..
// run command else if (action == '_runCommand' && state.ack !== true) { adapter.log.info('_runCommand modify'); robot.publish('cmd', state.val, () => { adapter.log.info('Ran command ' + state.val + '!'); }); }Ich kenne die Internas von IOBroker nicht und dachte es wäre die Stelle im Code die ausgeführt wird sobald ich den Inhalt der Node 'roomba.0.commands._runCommand' verändere. Ich sehe auch im Log nicht den erwarteten Output '_runCommand modify'
Liege ich damit falsch ?Viele Grüße
Kai
-
Hallo zusammen, hallo @Zefau ,
ich habe mal ein wenig Recherche betrieben. Ich finde Deinen Adapter super und würde gerne die Node _runCommand benutzen.
Jedoch tut sich beim Benutzen dieser so garnichts.
So wie ich Deinen Code verstehe (roomba.js) Zeile 151// run command else if (action == '_runCommand' && state.ack !== true) { let command = { command: state.val, time: Date.now() / 1000 | 0, initiator: 'localApp' }; robot.publish('cmd', JSON.stringify(command), () => { adapter.log.info('Ran command ' + state.val + '!'); }); }läßt Du dort nur ein Kommando wir 'start' o.ä., ohne Parameter zu, da der eigentliche Commandstring erst via stringify erzeugt wird.
Also möchte ich ein Command wie (btw: Dieses Command funktioniert wenn ich eine Verbindung zum s9 via MQTT Explorer aufbaue){ "command": "start", "ordered": 1, "params": { "carpetBoost": false, "noAutoPasses": false, "twoPass": false, "vacHigh": false }, "pmap_id": "???", "regions": [ { "region_id": "12", "type": "rid" } ], "user_pmapv_id": "???" }los schicken, wird folgendes in die Methode publish geschickt:
{ command: { "command": "start", "ordered": 1, "params": { "carpetBoost": false, "noAutoPasses": false, "twoPass": false, "vacHigh": false }, "pmap_id": "???", "regions": [ { "region_id": "12", "type": "rid" } ], "user_pmapv_id": "???" }, time: Date.now() / 1000 | 0, initiator: 'localApp' }... und das dürfte einen Fehler produzieren.
Ich möchte Dir nicht vorgreifen, jedoch sollte der case für _runCommand nicht so aussehen ?// run command else if (action == '_runCommand' && state.ack !== true) { robot.publish('cmd', state.val, () => { adapter.log.info('Ran command ' + state.val + '!'); }); }Edit: Ich habe gerade meine lokale roomba.js dahingehend geändert. Ich denke der Case wird nicht angesprungen..
// run command else if (action == '_runCommand' && state.ack !== true) { adapter.log.info('_runCommand modify'); robot.publish('cmd', state.val, () => { adapter.log.info('Ran command ' + state.val + '!'); }); }Ich kenne die Internas von IOBroker nicht und dachte es wäre die Stelle im Code die ausgeführt wird sobald ich den Inhalt der Node 'roomba.0.commands._runCommand' verändere. Ich sehe auch im Log nicht den erwarteten Output '_runCommand modify'
Liege ich damit falsch ?Viele Grüße
Kai
Hallo zusammen,
entschuldigt bitte, jedoch es hat mir keine Ruhe gelassen.
Ich habe die roomba.js dahin gehend angepasst sodass der _runCommand Befehl funktioniert.@Zefau : es wäre super wenn Du das prüfen könntest und ggf. einchecken.
Ich habe folgendes angepasst:
Zeile 151
else if (action == '_runCommand' && state.ack !== true) { robot.publish('cmd', state.val, () => { adapter.log.info('Ran command ' + state.val + '!'); }); }Zeile 616
if (node.node !== undefined) { let leafnode = node.node.substr(node.node.lastIndexOf('.')+1); //adapter.log.info('Leafnode: ' + leafnode + '.'); if ((leafnode) && (leafnode === '_runCommand' ) && listeners[node.node] === undefined) { adapter.log.info('Subscripe Leafnode: ' + leafnode + '.'); adapter.subscribeStates(node.node); // attach state listener listeners[node.node] = node; } adapter.getState(node.node, function(err, res) { if ((err !== null || !res) && (node.node !== undefined && node.description !== undefined)) library.set(node, ''); }); }Ich habe es bei mir getestet und das _runCommand funktioniert.
{ "command": "start", "ordered": 1, "params": { "carpetBoost": false, "noAutoPasses": false, "twoPass": false, "vacHigh": false }, "pmap_id": "yourmapid", "regions": [ { "region_id": "12", "type": "rid" } ], "user_pmapv_id": "yourid" }Ich bekomme immer wieder ein "Cannot read property 'toString' of null" aber da bin ich dran.
Ich denke das habe ich mir eingefangen als ich die Nodes etwas verändert habe.LG und have fun
Kai -
Hallo zusammen,
entschuldigt bitte, jedoch es hat mir keine Ruhe gelassen.
Ich habe die roomba.js dahin gehend angepasst sodass der _runCommand Befehl funktioniert.@Zefau : es wäre super wenn Du das prüfen könntest und ggf. einchecken.
Ich habe folgendes angepasst:
Zeile 151
else if (action == '_runCommand' && state.ack !== true) { robot.publish('cmd', state.val, () => { adapter.log.info('Ran command ' + state.val + '!'); }); }Zeile 616
if (node.node !== undefined) { let leafnode = node.node.substr(node.node.lastIndexOf('.')+1); //adapter.log.info('Leafnode: ' + leafnode + '.'); if ((leafnode) && (leafnode === '_runCommand' ) && listeners[node.node] === undefined) { adapter.log.info('Subscripe Leafnode: ' + leafnode + '.'); adapter.subscribeStates(node.node); // attach state listener listeners[node.node] = node; } adapter.getState(node.node, function(err, res) { if ((err !== null || !res) && (node.node !== undefined && node.description !== undefined)) library.set(node, ''); }); }Ich habe es bei mir getestet und das _runCommand funktioniert.
{ "command": "start", "ordered": 1, "params": { "carpetBoost": false, "noAutoPasses": false, "twoPass": false, "vacHigh": false }, "pmap_id": "yourmapid", "regions": [ { "region_id": "12", "type": "rid" } ], "user_pmapv_id": "yourid" }Ich bekomme immer wieder ein "Cannot read property 'toString' of null" aber da bin ich dran.
Ich denke das habe ich mir eingefangen als ich die Nodes etwas verändert habe.LG und have fun
Kai -
Ich habe meinen alten Roomba, den ich mit WLAN umgerüstet habe, über Node-Red eingebunden.
Das hat mir völlig gereicht - jetzt habe ich einen Neato Botvac und für den gibt es ja einen Adapter.
Gruß,
Eric
Von unterwegs getippert
-
@eric2905 wie hast du deinen den umgebaut? Ich habe einen Roomba 605
-
Ich hatte auch die Meldung
Cannot read property 'toString' of null
im Log.Ursache war anscheinend die fehlenden Einträge unter:
roomba.0.missions.currentNachdem ich die Einträge von Hand hinzugefügt habe werden diese vom Adapter verwendet und im Log gibt es keinen Fehler mehr.
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden460
Online33.0k
Benutzer83.3k
Themen1.3m
Beiträge