

Test Adapter mihome-vacuum v1.9.x
-
so, nach Werksreset habe ich auf Valetudo RE 0.8 geflasht. Karte wurde im Adapter korrekt aufgebaut. Leider hat der Robi dann nach ca. einer Minute die Verbindung verloren. Danach Update auf 0.8.1 Karte wird im Webinterface aufgebaut, in iobroker wieder nur verpixelt. Danach wieder Werksreset und direkt 0.8.1 mit rrcc geflasht ohne Änderungen. Habe auch weitere Probleme mit 0.8.1: Timer lässt sich nicht setzen und Saugstärke nicht ändern.
Gehe jetzt nochmal auf 0.8 zurück.... -
Ich habe den Adapter auch auf die 1.9.x angehoben.
Funktioniert alles tadellos. Also auch die Kartenfunktion in Verbindung mit ValetudoRE auf meinen Model 1.
Ich hatte vorher das Kartenscript am laufen.
Ist eine Integration von Telegram (wie im Script) geplant?
Grüße -
Die verpixelte Kartendarstellung liegt an der neuen 2008 Firmware. Anscheinend hat sich da etwas bei der Verschlüsselung geändert. Gibt es eine Möglichkeit die Karten der neuen Firmware darzustellen?
-
@base versuch mal die version 1.10.4 damit sollte die Karte wieder gehen. wenn ich die originale 2008 aufspiele kann ich über ein factory reset zurück? will nämlich auf original um die cloud anzubinden
@Meistertr werde es heute abend testen. Es gibt jetzt auch eine neue Beta von rand256 mit 2008er Firmware die ich heute abend antesten will. Werde dann Rückmeldung geben.
Habe mir zum Testen die Orginal-2008 FW von https://vacuumz.info/download/gen2/stock/ gezogen. Durch Factory Reset hatte ich die alte Firmware wieder drauf... -
@Meistertr werde es heute abend testen. Es gibt jetzt auch eine neue Beta von rand256 mit 2008er Firmware die ich heute abend antesten will. Werde dann Rückmeldung geben.
Habe mir zum Testen die Orginal-2008 FW von https://vacuumz.info/download/gen2/stock/ gezogen. Durch Factory Reset hatte ich die alte Firmware wieder drauf... -
@base danke, ich versuche dies we noch die cloud Verbindung im Adapter einzubauen.. Dann geht die Karte über alle Wege..
@Meistertr konnte den Adapter erfoglreich mit der neuen Valetudo RE 0.9.0-beta testen. Karte wird in iobroker angezeigt. Räume werden zumindest in Valetudo erkannt, in iobroker waren die jetzt noch nicht da. Muss ich morgen aber nochmal mit der gesammten Fläche testen.
Tausend Dank für deine Arbeit!!!
Edit: Jetzt fehlt nur noch das Laden von Karten im Adapter...

-
@Meistertr das ist mal fein, darauf warte ich schon lange

Wann ist es verfügbar?@Agria4800 schätze zum Wochenende
-
@Agria4800 schätze zum Wochenende
@Meistertr super, vielen Dank schonmal im Vorab für die echt tolle Arbeit.

-
@Agria4800 schätze zum Wochenende
@Meistertr Geht das dann auch mit stock firmware und dem mirobot 1S und Xiaomi mainland China Server?
Hatte das in einem Post von dir so verstanden dass die Karte nun vom Xiaomi Server geholt wird. Lese aber nun nur noch Firmware 2008. So eine bzw. Valetudo gibt es aber für den 1S nicht...:: So long! Tom ::..
NUC7i3 (Ubuntu Proxmox VM) | Echo Dots 2+3. Gen | Xiaomi Sensoren | Mi Robot 1S | Yeelight | Sonoff | Shelly | H801 RGB | Gosund SP1 | NodeMCU+ESP32 | Kostal Plenticore PV+BYD | openWB
-
@Meistertr Geht das dann auch mit stock firmware und dem mirobot 1S und Xiaomi mainland China Server?
Hatte das in einem Post von dir so verstanden dass die Karte nun vom Xiaomi Server geholt wird. Lese aber nun nur noch Firmware 2008. So eine bzw. Valetudo gibt es aber für den 1S nicht.@Diginix ja es geht mit der stock firmware. 2008 musste ich nur installieren um die Raumerkennung zu haben damit ich sie einbinden kann. Bis lang habe ich china und deutschland als server eingebunden, getestet aber bis lang nur mit de server. die karte sollte anschließend mit allen xiaomi/rockrobos gehen die eine Karte bereitstellen.
-
@Diginix ja es geht mit der stock firmware. 2008 musste ich nur installieren um die Raumerkennung zu haben damit ich sie einbinden kann. Bis lang habe ich china und deutschland als server eingebunden, getestet aber bis lang nur mit de server. die karte sollte anschließend mit allen xiaomi/rockrobos gehen die eine Karte bereitstellen.
@Meistertr Coole Sache. Wobei ich keine VIS habe, nur MaterialUI. Aber das wäre ein Grund dafür ein Frontend zu bauen.
Ist das immer eine Pixelgrafik und bei Zeichnen der Pfade und Saugerposition werden alle Pixel alle x Sekunden vom Xiaomi Server geholt oder wie läuft das?..:: So long! Tom ::..
NUC7i3 (Ubuntu Proxmox VM) | Echo Dots 2+3. Gen | Xiaomi Sensoren | Mi Robot 1S | Yeelight | Sonoff | Shelly | H801 RGB | Gosund SP1 | NodeMCU+ESP32 | Kostal Plenticore PV+BYD | openWB
-
@Meistertr Coole Sache. Wobei ich keine VIS habe, nur MaterialUI. Aber das wäre ein Grund dafür ein Frontend zu bauen.
Ist das immer eine Pixelgrafik und bei Zeichnen der Pfade und Saugerposition werden alle Pixel alle x Sekunden vom Xiaomi Server geholt oder wie läuft das?@Diginix ja genau. es ist eine Pixelgrafik die beim Saugen jedesmal erstellt wird. habe herade mal gemessen, von beginn serveranfrage bis zur generierten grafik vergehen 300ms. Die daten kommen in einer gepackten binärdatei nur 7kb groß.
Ausgegeben wird ein Canvas, das lässt sich im browser dynamisch ohne Ruckler darstellen, Als zweites für Telegramm oder auch material wird ein png bereitgestellt hier ist der Speicherintervall jedoch höher, min 5sekunden, da die Erstellung aufwendiger ist.Während des schreibens fällt mir auf, dass ich den boden auch alle x-mal generieren kann, dass macht es nochmal etwas schlanker
Aber alles in allem sollten auch kleinere rechner bsp rpi2 damit klar kommen..
-
@Diginix ja genau. es ist eine Pixelgrafik die beim Saugen jedesmal erstellt wird. habe herade mal gemessen, von beginn serveranfrage bis zur generierten grafik vergehen 300ms. Die daten kommen in einer gepackten binärdatei nur 7kb groß.
Ausgegeben wird ein Canvas, das lässt sich im browser dynamisch ohne Ruckler darstellen, Als zweites für Telegramm oder auch material wird ein png bereitgestellt hier ist der Speicherintervall jedoch höher, min 5sekunden, da die Erstellung aufwendiger ist.Während des schreibens fällt mir auf, dass ich den boden auch alle x-mal generieren kann, dass macht es nochmal etwas schlanker
Aber alles in allem sollten auch kleinere rechner bsp rpi2 damit klar kommen..
-
 H Homoran verschob dieses Thema von Tester am
H Homoran verschob dieses Thema von Tester am
-
H Homoran verschob dieses Thema von ...nicht in offiziellem Repo am
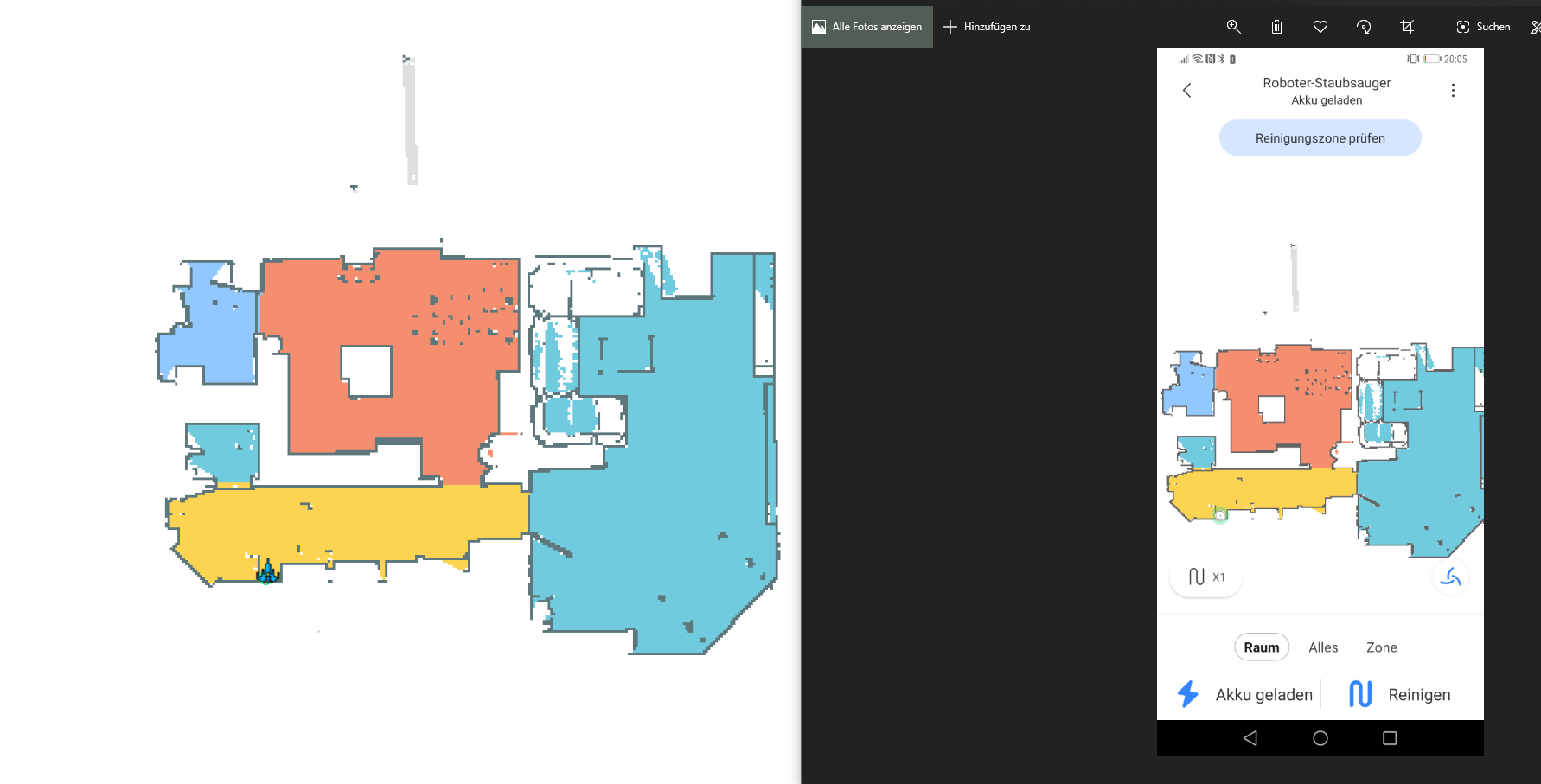 das sieht in iobroker doch schonmal aus wie in der app :)
das sieht in iobroker doch schonmal aus wie in der app :)Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
463
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge