

Roborock S5 "cleaning area" per Tastendruck?
-
@Brati sagte in Roborock S5 "cleaning area" per Tastendruck?:
@FrankDCE sagte in Roborock S5 "cleaning area" per Tastendruck?:
Hallo euch beiden,
Danke für die Hinweise, werde ich ausprobieren.
Anschlussfrage: über den Adapter kann ich doch sicher auslesen, wenn der Staubbehälter voll ist. Meine holde möchte den Roboter gern unter dem Sofa parken (ist hoch genug).
Gibt es eine Möglichkeit, dass er, wenn der Behälter voll ist, zu einer gewissen Koordinate fährt (konkret in die Küche vor den Mülleimer) und da "wartet", bis er geleert wird?
Und wieso wachsen die Ideen in der smart-home Welt stetig von Tag zu Tag? ;-))
Dank euch,
Frank
Hallo, er meldet nicht, wenn der Behälter voll ist. Meiner parkt auch unter dem Sofa und fährt jeden Samstag um 11 Uhr zum Mülleimer. Ich leere ihn aber trotzdem in der Woche auch mal von Hand, auch hier kommt er auf Tastendruck zum Mülleimer (hab eh einen 6 fach Homematic Taster in der Küche und nutze dafür langen Druck beim Lichtschalter...).
Vom Prinzip hinterlegst du hier einfach die Koordinaten zum Mülleimer in einem Script (für echte Taster) oder im vis hinter einem Button.
Grüße
Brati
Auf die Idee kam ich garnicht, obwohl ich mir 4 mal die Birne angestoßen habe, weil der Sauger unter schwebenden Möbel steht. Jetzt fährt er auch zur Mülltonne mit Alexa, oder 4 Tastern in der Küche :-)
Danke für den Tipp.Gruß
-
So, zu früh gefreut .... ;-)
Die Zonenreinigung funktioniert wie gewünscht.
Das zum Mülleimer schicken leider nicht.... im Log erscheint die Fehlermeldung
"GoTo need two koordinates with type number" - aber er hat doch die beiden Koordinaten, ausgelesen aus der flole vac app; hat mit dem Eßtisch ja auch funktioniert...
Die Szene sollte doch auch passen, oder?
Nochmals 1.000 Dank!

-
So, zu früh gefreut .... ;-)
Die Zonenreinigung funktioniert wie gewünscht.
Das zum Mülleimer schicken leider nicht.... im Log erscheint die Fehlermeldung
"GoTo need two koordinates with type number" - aber er hat doch die beiden Koordinaten, ausgelesen aus der flole vac app; hat mit dem Eßtisch ja auch funktioniert...
Die Szene sollte doch auch passen, oder?
Nochmals 1.000 Dank!
-
@FrankDCE sagte in Roborock S5 "cleaning area" per Tastendruck?:
GoTo need two koordinates with type number
Bin mir gerade nicht sicher... hast du es mal ohne die eckigen Klammern probiert?
Tatsache, das war es. Komisch, im area cleaning sind die auch drin und es klappt.
Wie dem auch sei: Danke für den Hinweis.
-
@FrankDCE
Ja gibt es. Nutze ich selber. Allerdings sage ich primär Alexa, sie soll das Esszimmer/Küche/Flur/Haus sauber machen. Das Ziel ist das Gleiche.Du musst Dir die FloleVac App runterladen. Da kannst du dann die Koordinaten für den Bereich, der gesaugt werden soll, bestimmen. Dann im iobroker entsprechende Szenen erstellen. Zu guter Letzt in vis mit einem Button diese Szene starten.
Eine Anleitung findest du im Netz, YouTube oder hier im Forum.
Gruß Stoni
@Stoni Genau das hätte ich auch gerne.
- Alles per Sprachbefehle.
Also z.B. Alexa, sauge das Esszimmer oder Alexa, sauge das Wohnzimmer
Falls alles gereinigt werden soll: Alexa, sauge die Wohnung.
Für die Reinigung / Wartung wäre es ideal wenn ich Alexa sagen könnte: Alexa, fahre Hugo (so heisst unser S50) zum Mülleimer.
Wie macht man das ?
Ok, die Zonen der Zimmer oder Bereiche, also Wohnzimmer, Esszimmer, Mülleimer,...) bekommt man ja in der Flolevac App.Muss man für die komplette Wohnung die Zone über alles ziehen?
Was macht man dann mit den ermittelten Zonen?
Wo müssen die eingebunden werden damit alles per Sprache läuft?Wenn er vor dem Mülleimer steht und gereinigt wurde müsste man ihn ja mit Alexa, fahre Hugo zur Ladestation zurückschicken können?
Weitere Befehle: Alexa, pausiere Saugvorgang oder Alexa, beende Saugvorgang.
Was gibt man da wo an ?
Man kann ja im Alexa2 Adapter in der Summary immer den letzten Befehl sehen, also kann man darauf triggern und eine Szene abspielen lassen?
Danke im Voraus.
LG Martin
- Alles per Sprachbefehle.
-
Hallo,
lies mal hier:
https://forum.iobroker.net/post/253807
Du musst ihn einmal alles reinigen lassen und einstellen, dass die Karte gespeichert wird. Auf Basis dieser Karte liest du die Koordinaten für deinen Bereich aus (per FloleVac App).
Wenn du einfach nur eine Zone reinigen willst, kannst du diese einfach per Button setzen. Solle es variabel sein, musst du es per Script zusammen basteln.
Grüße
Brati
@Brati sagte in Roborock S5 "cleaning area" per Tastendruck?:
Du musst ihn einmal alles reinigen lassen und einstellen, dass die Karte gespeichert wird.
Hi Brati,
wo genau kann ich sagen das die Karte gespeichert wird? Hast du evtl einen Screenshot dazu? Behält er dann auch die Karte wenn man den Sauger über den Button am Sauger startet?
-
@Stoni Genau das hätte ich auch gerne.
- Alles per Sprachbefehle.
Also z.B. Alexa, sauge das Esszimmer oder Alexa, sauge das Wohnzimmer
Falls alles gereinigt werden soll: Alexa, sauge die Wohnung.
Für die Reinigung / Wartung wäre es ideal wenn ich Alexa sagen könnte: Alexa, fahre Hugo (so heisst unser S50) zum Mülleimer.
Wie macht man das ?
Ok, die Zonen der Zimmer oder Bereiche, also Wohnzimmer, Esszimmer, Mülleimer,...) bekommt man ja in der Flolevac App.Muss man für die komplette Wohnung die Zone über alles ziehen?
Was macht man dann mit den ermittelten Zonen?
Wo müssen die eingebunden werden damit alles per Sprache läuft?Wenn er vor dem Mülleimer steht und gereinigt wurde müsste man ihn ja mit Alexa, fahre Hugo zur Ladestation zurückschicken können?
Weitere Befehle: Alexa, pausiere Saugvorgang oder Alexa, beende Saugvorgang.
Was gibt man da wo an ?
Man kann ja im Alexa2 Adapter in der Summary immer den letzten Befehl sehen, also kann man darauf triggern und eine Szene abspielen lassen?
Danke im Voraus.
LG Martin
@kaiserm sagte in Roborock S5 "cleaning area" per Tastendruck?:
Wie macht man das ?
Ich mache das über Alexa-Routinen, die jeweils einen Datenpunkt in ioBroker auf true setzen. Ein JavaScript beobachtet die und startet dann die jeweilige Zonenreinigung. Hierbei wird keine Karte neu generiert.
Alles saugen geht über den normalen "start"-Datenpunkt vom Sauger, also keine Zonenreinigung. Dabei wird (zumindest bei mir, 1. Generation) jedes Mal die Karte neu aufgebaut (und so Fehler bereinigt).
Alexa, fahre Hugo (so heisst unser S50) zum Mülleimer.
Mache noch eine Alexa-Routine, die einen GoTo-Befehl steuert.
Wenn er vor dem Mülleimer steht und gereinigt wurde müsste man ihn ja mit Alexa, fahre Hugo zur Ladestation zurückschicken können?
Alexa, pausiere Saugvorgang oder Alexa, beende Saugvorgang.Alles Alexa-Routinen, die den jeweiligen DP (Home, Pause, etc...) des Vacuum-Adapters setzen.
- Alles per Sprachbefehle.
-
Nur nochmal zu meinem Verständnis:
Ich möchte folgendes erreichen:
Alexa, saug die Wohnung - Der S50 soll alles saugen
Alexa, saug das ***zimmer - Der S50 soll das angegebene Zimmer saugen
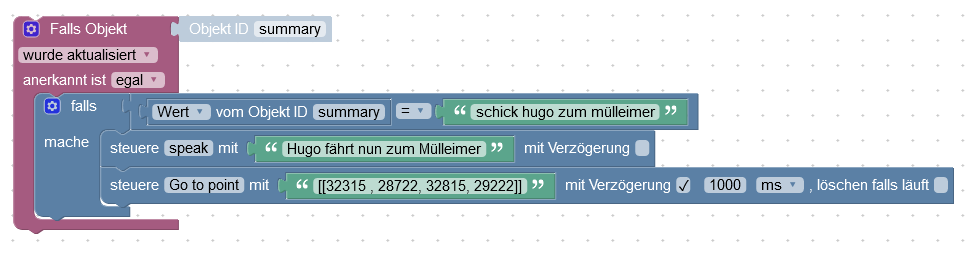
Alexa, schick Hugo zum Mülleimer - Der S50 (Hugo) fährt zum Mülleimer
Alexa, schick Hugo zum laden - Der S50 (Hugo) fährt zurück zur Ladestation
Alxea, Hugo Pause - Der S50 bleibt stehen
Alexa, Hugo Weiter - Der S50 saugt weiter
Alexa, Hugo Stop - Der S50 stoppt und fährt zurück in die LadestationIch benötige ausser dem Bestätigungston von Alexa eigentlich kein weiteres Gelaber.
Der S50 labert ja selbst auch wenn ihm was nicht passen sollte.Ich muss also Summary im ersten Fall auf saug UND die UND Wohnung abfragen.
Wenn das wahr ist soll der Sauger die Koordinate ansteuern und lossaugen.
Wie steuert man dann die Koordinaten aus dem Script an?
Habe gelesen das man die Koordinaten über eine Szene übergeben muss?!
In diesem Fall (Wohnung) müsste man nacheinander die Koordinaten aller Zimmer hintereinander in die Szene schreiben.Kann man per Script dann STEUERE SZENE Sauge_Wohnung mit WAHR ansprechen?
Was muss man für Pausieren, Weiter und Stop ansteuern damit der S50 dies auch macht ?
Danke im Voraus
LG Martin
-
Nur nochmal zu meinem Verständnis:
Ich möchte folgendes erreichen:
Alexa, saug die Wohnung - Der S50 soll alles saugen
Alexa, saug das ***zimmer - Der S50 soll das angegebene Zimmer saugen
Alexa, schick Hugo zum Mülleimer - Der S50 (Hugo) fährt zum Mülleimer
Alexa, schick Hugo zum laden - Der S50 (Hugo) fährt zurück zur Ladestation
Alxea, Hugo Pause - Der S50 bleibt stehen
Alexa, Hugo Weiter - Der S50 saugt weiter
Alexa, Hugo Stop - Der S50 stoppt und fährt zurück in die LadestationIch benötige ausser dem Bestätigungston von Alexa eigentlich kein weiteres Gelaber.
Der S50 labert ja selbst auch wenn ihm was nicht passen sollte.Ich muss also Summary im ersten Fall auf saug UND die UND Wohnung abfragen.
Wenn das wahr ist soll der Sauger die Koordinate ansteuern und lossaugen.
Wie steuert man dann die Koordinaten aus dem Script an?
Habe gelesen das man die Koordinaten über eine Szene übergeben muss?!
In diesem Fall (Wohnung) müsste man nacheinander die Koordinaten aller Zimmer hintereinander in die Szene schreiben.Kann man per Script dann STEUERE SZENE Sauge_Wohnung mit WAHR ansprechen?
Was muss man für Pausieren, Weiter und Stop ansteuern damit der S50 dies auch macht ?
Danke im Voraus
LG Martin
@kaiserm Hier sind die unterschiedlichen Kommandos beschrieben:
https://github.com/iobroker-community-adapters/ioBroker.mihome-vacuum#gotoIch kann später auch gerne mein Skript zur Verfügung stellen, allerdings kann das noch nicht alles was du dir wünschst. Nur einzelne Räume saugen und zurück zum Dock. Und es benötigt Valetudo auf dem Robbie, da meiner (1. Generation) gerne mal die Karte dreht.
-
@kaiserm Hier sind die unterschiedlichen Kommandos beschrieben:
https://github.com/iobroker-community-adapters/ioBroker.mihome-vacuum#gotoIch kann später auch gerne mein Skript zur Verfügung stellen, allerdings kann das noch nicht alles was du dir wünschst. Nur einzelne Räume saugen und zurück zum Dock. Und es benötigt Valetudo auf dem Robbie, da meiner (1. Generation) gerne mal die Karte dreht.
@AlCalzone Das wäre Klasse.
Einzelne Räume und zurück zum Dock wäre ja schon mal was.
Pause, Weiter und andere Koordinaten sind ja auch nur weitere Kommandos.
In welchen Datenpunkt muss man denn z.B. pause schreiben damit er pausiert?
Update: Habe gesehen das pause ja ein eigener Datenpunkt ist.
Also müsste ja steuere Datenpunkt mit true den S50 pausieren.
LG Martin
-
@AlCalzone Das wäre Klasse.
Einzelne Räume und zurück zum Dock wäre ja schon mal was.
Pause, Weiter und andere Koordinaten sind ja auch nur weitere Kommandos.
In welchen Datenpunkt muss man denn z.B. pause schreiben damit er pausiert?
Update: Habe gesehen das pause ja ein eigener Datenpunkt ist.
Also müsste ja steuere Datenpunkt mit true den S50 pausieren.
LG Martin
@kaiserm Also wie versprochen:
Hier die Variante, die bei mir im Einsatz ist (inklusive Test der Kartenorientierung via Valetudo). Muss als TypeScript angelegt werden und benötigt das zusätzliche Paket "axios":
import axios from "axios"; // Hier den Hostnamen und Zugangsdaten eintragen, unter dem Valetudo erreichbar ist const roboHostname = "rockrobo.fritz.box"; const valetudoAuth = { username: 'valetudo-username', password: 'valetudo-password' } // Hier den State eintragen, der den aktuellen Sauger-Status angibt const idVacuumState = "mihome-vacuum.0.info.state"; const center: Point = [25600, 25600]; // Koordiaten zählen von unten links (0,0) nach oben rechts (51200,51200) // Die folgenden Koordinaten gehen von nicht rotierter Karte (Winkel 0) aus const rooms: Record<string, Rectangle[]> = { "Küche": [[21600, 29100, 23500, 33100]], "Flur": [[18400, 24000, 22200, 27100], [19500, 27100, 21600, 30400]], "Wohnzimmer": [[17600, 20000, 21600, 24000], [21600, 19200, 24200, 23200]], "Schlafzimmer": [[24100, 23200, 26100, 27400], [22100, 23800, 24100, 27400]], "Bad": [[21500, 27500, 23200, 29000]], }; // =============================================================================== type Rectangle = [number, number, number, number]; type Point = [number, number]; /** rotates a rectangle by 90° around the absolute origin */ function rotate90([x1, y1, x2, y2]: Rectangle): Rectangle { return [-y2, x1, -y1, x2]; } /** rotates a rectangle by 180° around the absolute origin */ function rotate180([x1, y1, x2, y2]: Rectangle): Rectangle { return [-x2, -y2, -x1, -y1]; } /** Rotates a rectangle around the given center by the given angle */ function rotate(rect: Rectangle, center: Point, angle: number) { rect = [rect[0] - center[0], rect[1] - center[1], rect[2] - center[0], rect[3] - center[1]]; if (angle % 180 === 90) { rect = rotate90(rect); angle -= 90; } if (angle === 180) { rect = rotate180(rect); } rect = [rect[0] + center[0], rect[1] + center[1], rect[2] + center[0], rect[3] + center[1]]; return rect; } for (const room of Object.keys(rooms) as (keyof typeof rooms)[]) { createState(`Staubsauger.${room}`, { type: "boolean", read: true, write: true, role: "switch", name: `${room} saugen`, }); on({ id: `javascript.${instance}.Staubsauger.${room}`, val: true, ack: false }, async () => { if (getState(idVacuumState).val !== 8) await cancelCurrentAction(); if (getMapRotation() === -1 /* unbekannt */) { // We need to test the map rotation const rotation = await testMapRotation(); log(`Die Karte ist ${rotation !== 0 ? `um ${rotation}° ` : "nicht "}rotiert.`); await rememberMapRotation(rotation); } // Now that we know how the map is rotated, we can clean the room cleanRoom(room); }); } createState(`Staubsauger.stop`, { type: "boolean", read: true, write: true, role: "switch", name: `Staubsauger anhalten`, }); on({ id: `javascript.${instance}.Staubsauger.stop`, val: true, ack: false }, () => { stopCleanup(); }); const idMapRotated = "Staubsauger.info.mapRotated"; createState(idMapRotated, { type: "number", read: true, write: false, role: "indicator", states: { "-1": "unknown", "0": "Robo links vom Dock", "90": "Robo unten vom Dock", "180": "Robo rechts vom Dock", "270": "Robo oben vom Dock", }, name: `Wie die Karte rotiert ist`, }); /** * Bestimmt die Kartenrotation wenn der Staubsauger neben dem Dock steht * 0 Grad bedeutet, der Sauger steht links */ async function testMapRotation(): Promise<number> { log("Teste Kartenorientierung..."); const { data: { charger, robot } } = await axios({ url: `http://${roboHostname}/api/map/latest`, auth: valetudoAuth }); // Valetudo zählt von oben links nach unten rechts, d.h. die Y-Koordinaten // sind entgegengesetzt der mathematischen Definition let c2r = [robot[0] - charger[0], charger[1] - robot[1]]; const angle = Math.atan2(c2r[1], c2r[0]) * 180 / Math.PI; if (angle <= 45 && angle >= -45) { // Sauger steht rechts return 180; } else if (angle > 45 && angle < 135) { // Sauger steht oben return 270; } else if (angle < -45 && angle > -135) { // Sauger steht unten return 90; } else { return 0; } } function rememberMapRotation(rotation: number): Promise<void> { return setStateAsync(idMapRotated, rotation); } function getMapRotation(): number { return getState(idMapRotated).val; } // "Forget" map rotation when the vacuum starts charging on({ id: idVacuumState, val: 8 /* charging */ }, (obj) => { setState(idMapRotated, -1 /* unknown */); // And reset all control states for (const room of Object.keys(rooms) as (keyof typeof rooms)[]) { setState(`Staubsauger.${room}`, false, true); } setState(`Staubsauger.stop`, false, true); }); async function beginCleanup(): Promise<void> { } async function cancelCurrentAction(): Promise<void> { setState("mihome-vacuum.0.control.pause", true); // wait for the "paused" status before going home await waitForPauseOrSleep(); } async function stopCleanup(): Promise<void> { log(`Saugvorgang abgebrochen!`); setState(`Staubsauger.stop`, true, true); if (getState(idVacuumState).val !== 8) { await cancelCurrentAction(); await setStateAsync('mihome-vacuum.0.control.home', true); // wait for the "charging" status before resolving await waitFor(idVacuumState, 8); } log(`Staubsauger ist in der Basis`); setState(`Staubsauger.stop`, false, true); } async function cleanRoom(room: keyof typeof rooms): Promise<void> { log(`Saugvorgang für ${room} gestartet!`); setState(`Staubsauger.${room}`, true, true); const mapRotation = getMapRotation(); const originalCoords = rooms[room]; log(`original coordinates: ${JSON.stringify(originalCoords)}`); const roomCoords = rooms[room].map(rect => rotate(rect, center, mapRotation)); log(`rotated coordinates: ${JSON.stringify(roomCoords)}`); const coords = roomCoords[0]; const targetCoords = [ ((coords[0] + coords[2]) / 2).toFixed(0), ((coords[1] + coords[3]) / 2).toFixed(0), ] // go to center of first zone const gotoString = targetCoords.join(","); await setStateAsync("mihome-vacuum.0.control.goTo", gotoString); log(`Fahre zur Mitte von ${room}`); await wait(10000); await waitForPauseOrSleep(); if (getState("Staubsauger.stop").val) return; const zoneCleanString = roomCoords.map(zone => { return "[" + zone.concat(1).map(coord => coord.toString()).join(",") + "]"; }).join(","); log("Starte Zonenreinigung..."); await setStateAsync("mihome-vacuum.0.control.zoneClean", zoneCleanString); // wait for the cleanup to finish await waitFor(idVacuumState, 6); } async function waitForPauseOrSleep(): Promise<void> { log("Warte auf Zustand schlafen oder Pause..."); switch (getState(idVacuumState).val) { case 3: case 10: log(" => Zustand bereits aktiv!"); return; default: await Promise.race([ waitFor(idVacuumState, 10), waitFor(idVacuumState, 3), ]); log(" => Zustand erreicht!"); } } function wait(ms: number): Promise<void> { return new Promise(resolve => { setTimeout(resolve, ms); }); } function waitFor(stateID: string, value: any): Promise<void> { return new Promise(resolve => { const handler = (obj: iobJS.ChangedStateObject) => { if (obj.newState.val === value) { unsubscribe(handler); resolve(); } } subscribe(stateID, handler); }) } function setStateAsync(id: string, state: any): Promise<void> { return new Promise(res => { setState(id, state, () => res()); }); }Wenn du die automatische Rotation nicht benötigst oder kein Valetudo hast, wäre folgendes die vereinfachte Variante:
// Hier den State eintragen, der den aktuellen Sauger-Status angibt const idVacuumState = "mihome-vacuum.0.info.state"; // Koordiaten zählen von unten links (0,0) nach oben rechts (51200,51200) // Die folgenden Koordinaten gehen von nicht rotierter Karte (Winkel 0) aus const rooms: Record<string, Rectangle[]> = { "Küche": [[21600, 29100, 23500, 33100]], "Flur": [[18400, 24000, 22200, 27100], [19500, 27100, 21600, 30400]], "Wohnzimmer": [[17600, 20000, 21600, 24000], [21600, 19200, 24200, 23200]], "Schlafzimmer": [[24100, 23200, 26100, 27400], [22100, 23800, 24100, 27400]], "Bad": [[21500, 27500, 23200, 29000]], }; // =============================================================================== type Rectangle = [number, number, number, number]; for (const room of Object.keys(rooms) as (keyof typeof rooms)[]) { createState(`Staubsauger.${room}`, { type: "boolean", read: true, write: true, role: "switch", name: `${room} saugen`, }); on({ id: `javascript.${instance}.Staubsauger.${room}`, val: true, ack: false }, async () => { if (getState(idVacuumState).val !== 8) await cancelCurrentAction(); cleanRoom(room); }); } createState(`Staubsauger.stop`, { type: "boolean", read: true, write: true, role: "switch", name: `Staubsauger anhalten`, }); on({ id: `javascript.${instance}.Staubsauger.stop`, val: true, ack: false }, () => { stopCleanup(); }); // Reset all control states when the vacuum starts charging on({ id: idVacuumState, val: 8 /* charging */ }, (obj) => { for (const room of Object.keys(rooms) as (keyof typeof rooms)[]) { setState(`Staubsauger.${room}`, false, true); } setState(`Staubsauger.stop`, false, true); }); async function cancelCurrentAction(): Promise<void> { setState("mihome-vacuum.0.control.pause", true); // wait for the "paused" status before going home await waitForPauseOrSleep(); } async function stopCleanup(): Promise<void> { log(`Saugvorgang abgebrochen!`); setState(`Staubsauger.stop`, true, true); if (getState(idVacuumState).val !== 8) { await cancelCurrentAction(); await setStateAsync('mihome-vacuum.0.control.home', true); // wait for the "charging" status before resolving await waitFor(idVacuumState, 8); } log(`Staubsauger ist in der Basis`); setState(`Staubsauger.stop`, false, true); } async function cleanRoom(room: keyof typeof rooms): Promise<void> { log(`Saugvorgang für ${room} gestartet!`); setState(`Staubsauger.${room}`, true, true); const roomCoords = rooms[room]; const coords = roomCoords[0]; const targetCoords = [ ((coords[0] + coords[2]) / 2).toFixed(0), ((coords[1] + coords[3]) / 2).toFixed(0), ] // go to center of first zone const gotoString = targetCoords.join(","); await setStateAsync("mihome-vacuum.0.control.goTo", gotoString); log(`Fahre zur Mitte von ${room}`); await wait(10000); await waitForPauseOrSleep(); if (getState("Staubsauger.stop").val) return; const zoneCleanString = roomCoords.map(zone => { return "[" + zone.concat(1).map(coord => coord.toString()).join(",") + "]"; }).join(","); log("Starte Zonenreinigung..."); await setStateAsync("mihome-vacuum.0.control.zoneClean", zoneCleanString); // wait for the cleanup to finish await waitFor(idVacuumState, 6); } async function waitForPauseOrSleep(): Promise<void> { log("Warte auf Zustand schlafen oder Pause..."); switch (getState(idVacuumState).val) { case 3: case 10: log(" => Zustand bereits aktiv!"); return; default: await Promise.race([ waitFor(idVacuumState, 10), waitFor(idVacuumState, 3), ]); log(" => Zustand erreicht!"); } } function wait(ms: number): Promise<void> { return new Promise(resolve => { setTimeout(resolve, ms); }); } function waitFor(stateID: string, value: any): Promise<void> { return new Promise(resolve => { const handler = (obj: iobJS.ChangedStateObject) => { if (obj.newState.val === value) { unsubscribe(handler); resolve(); } } subscribe(stateID, handler); }) } function setStateAsync(id: string, state: any): Promise<void> { return new Promise(res => { setState(id, state, () => res()); }); }Beide Varianten legen für jeden Raum und für Stop einen State an, den du dann jeweils mit einer Alexa-Routine ansprechen kannst.
Warum `sudo` böse ist: https://forum.iobroker.net/post/17109
-
@kaiserm Also wie versprochen:
Hier die Variante, die bei mir im Einsatz ist (inklusive Test der Kartenorientierung via Valetudo). Muss als TypeScript angelegt werden und benötigt das zusätzliche Paket "axios":
import axios from "axios"; // Hier den Hostnamen und Zugangsdaten eintragen, unter dem Valetudo erreichbar ist const roboHostname = "rockrobo.fritz.box"; const valetudoAuth = { username: 'valetudo-username', password: 'valetudo-password' } // Hier den State eintragen, der den aktuellen Sauger-Status angibt const idVacuumState = "mihome-vacuum.0.info.state"; const center: Point = [25600, 25600]; // Koordiaten zählen von unten links (0,0) nach oben rechts (51200,51200) // Die folgenden Koordinaten gehen von nicht rotierter Karte (Winkel 0) aus const rooms: Record<string, Rectangle[]> = { "Küche": [[21600, 29100, 23500, 33100]], "Flur": [[18400, 24000, 22200, 27100], [19500, 27100, 21600, 30400]], "Wohnzimmer": [[17600, 20000, 21600, 24000], [21600, 19200, 24200, 23200]], "Schlafzimmer": [[24100, 23200, 26100, 27400], [22100, 23800, 24100, 27400]], "Bad": [[21500, 27500, 23200, 29000]], }; // =============================================================================== type Rectangle = [number, number, number, number]; type Point = [number, number]; /** rotates a rectangle by 90° around the absolute origin */ function rotate90([x1, y1, x2, y2]: Rectangle): Rectangle { return [-y2, x1, -y1, x2]; } /** rotates a rectangle by 180° around the absolute origin */ function rotate180([x1, y1, x2, y2]: Rectangle): Rectangle { return [-x2, -y2, -x1, -y1]; } /** Rotates a rectangle around the given center by the given angle */ function rotate(rect: Rectangle, center: Point, angle: number) { rect = [rect[0] - center[0], rect[1] - center[1], rect[2] - center[0], rect[3] - center[1]]; if (angle % 180 === 90) { rect = rotate90(rect); angle -= 90; } if (angle === 180) { rect = rotate180(rect); } rect = [rect[0] + center[0], rect[1] + center[1], rect[2] + center[0], rect[3] + center[1]]; return rect; } for (const room of Object.keys(rooms) as (keyof typeof rooms)[]) { createState(`Staubsauger.${room}`, { type: "boolean", read: true, write: true, role: "switch", name: `${room} saugen`, }); on({ id: `javascript.${instance}.Staubsauger.${room}`, val: true, ack: false }, async () => { if (getState(idVacuumState).val !== 8) await cancelCurrentAction(); if (getMapRotation() === -1 /* unbekannt */) { // We need to test the map rotation const rotation = await testMapRotation(); log(`Die Karte ist ${rotation !== 0 ? `um ${rotation}° ` : "nicht "}rotiert.`); await rememberMapRotation(rotation); } // Now that we know how the map is rotated, we can clean the room cleanRoom(room); }); } createState(`Staubsauger.stop`, { type: "boolean", read: true, write: true, role: "switch", name: `Staubsauger anhalten`, }); on({ id: `javascript.${instance}.Staubsauger.stop`, val: true, ack: false }, () => { stopCleanup(); }); const idMapRotated = "Staubsauger.info.mapRotated"; createState(idMapRotated, { type: "number", read: true, write: false, role: "indicator", states: { "-1": "unknown", "0": "Robo links vom Dock", "90": "Robo unten vom Dock", "180": "Robo rechts vom Dock", "270": "Robo oben vom Dock", }, name: `Wie die Karte rotiert ist`, }); /** * Bestimmt die Kartenrotation wenn der Staubsauger neben dem Dock steht * 0 Grad bedeutet, der Sauger steht links */ async function testMapRotation(): Promise<number> { log("Teste Kartenorientierung..."); const { data: { charger, robot } } = await axios({ url: `http://${roboHostname}/api/map/latest`, auth: valetudoAuth }); // Valetudo zählt von oben links nach unten rechts, d.h. die Y-Koordinaten // sind entgegengesetzt der mathematischen Definition let c2r = [robot[0] - charger[0], charger[1] - robot[1]]; const angle = Math.atan2(c2r[1], c2r[0]) * 180 / Math.PI; if (angle <= 45 && angle >= -45) { // Sauger steht rechts return 180; } else if (angle > 45 && angle < 135) { // Sauger steht oben return 270; } else if (angle < -45 && angle > -135) { // Sauger steht unten return 90; } else { return 0; } } function rememberMapRotation(rotation: number): Promise<void> { return setStateAsync(idMapRotated, rotation); } function getMapRotation(): number { return getState(idMapRotated).val; } // "Forget" map rotation when the vacuum starts charging on({ id: idVacuumState, val: 8 /* charging */ }, (obj) => { setState(idMapRotated, -1 /* unknown */); // And reset all control states for (const room of Object.keys(rooms) as (keyof typeof rooms)[]) { setState(`Staubsauger.${room}`, false, true); } setState(`Staubsauger.stop`, false, true); }); async function beginCleanup(): Promise<void> { } async function cancelCurrentAction(): Promise<void> { setState("mihome-vacuum.0.control.pause", true); // wait for the "paused" status before going home await waitForPauseOrSleep(); } async function stopCleanup(): Promise<void> { log(`Saugvorgang abgebrochen!`); setState(`Staubsauger.stop`, true, true); if (getState(idVacuumState).val !== 8) { await cancelCurrentAction(); await setStateAsync('mihome-vacuum.0.control.home', true); // wait for the "charging" status before resolving await waitFor(idVacuumState, 8); } log(`Staubsauger ist in der Basis`); setState(`Staubsauger.stop`, false, true); } async function cleanRoom(room: keyof typeof rooms): Promise<void> { log(`Saugvorgang für ${room} gestartet!`); setState(`Staubsauger.${room}`, true, true); const mapRotation = getMapRotation(); const originalCoords = rooms[room]; log(`original coordinates: ${JSON.stringify(originalCoords)}`); const roomCoords = rooms[room].map(rect => rotate(rect, center, mapRotation)); log(`rotated coordinates: ${JSON.stringify(roomCoords)}`); const coords = roomCoords[0]; const targetCoords = [ ((coords[0] + coords[2]) / 2).toFixed(0), ((coords[1] + coords[3]) / 2).toFixed(0), ] // go to center of first zone const gotoString = targetCoords.join(","); await setStateAsync("mihome-vacuum.0.control.goTo", gotoString); log(`Fahre zur Mitte von ${room}`); await wait(10000); await waitForPauseOrSleep(); if (getState("Staubsauger.stop").val) return; const zoneCleanString = roomCoords.map(zone => { return "[" + zone.concat(1).map(coord => coord.toString()).join(",") + "]"; }).join(","); log("Starte Zonenreinigung..."); await setStateAsync("mihome-vacuum.0.control.zoneClean", zoneCleanString); // wait for the cleanup to finish await waitFor(idVacuumState, 6); } async function waitForPauseOrSleep(): Promise<void> { log("Warte auf Zustand schlafen oder Pause..."); switch (getState(idVacuumState).val) { case 3: case 10: log(" => Zustand bereits aktiv!"); return; default: await Promise.race([ waitFor(idVacuumState, 10), waitFor(idVacuumState, 3), ]); log(" => Zustand erreicht!"); } } function wait(ms: number): Promise<void> { return new Promise(resolve => { setTimeout(resolve, ms); }); } function waitFor(stateID: string, value: any): Promise<void> { return new Promise(resolve => { const handler = (obj: iobJS.ChangedStateObject) => { if (obj.newState.val === value) { unsubscribe(handler); resolve(); } } subscribe(stateID, handler); }) } function setStateAsync(id: string, state: any): Promise<void> { return new Promise(res => { setState(id, state, () => res()); }); }Wenn du die automatische Rotation nicht benötigst oder kein Valetudo hast, wäre folgendes die vereinfachte Variante:
// Hier den State eintragen, der den aktuellen Sauger-Status angibt const idVacuumState = "mihome-vacuum.0.info.state"; // Koordiaten zählen von unten links (0,0) nach oben rechts (51200,51200) // Die folgenden Koordinaten gehen von nicht rotierter Karte (Winkel 0) aus const rooms: Record<string, Rectangle[]> = { "Küche": [[21600, 29100, 23500, 33100]], "Flur": [[18400, 24000, 22200, 27100], [19500, 27100, 21600, 30400]], "Wohnzimmer": [[17600, 20000, 21600, 24000], [21600, 19200, 24200, 23200]], "Schlafzimmer": [[24100, 23200, 26100, 27400], [22100, 23800, 24100, 27400]], "Bad": [[21500, 27500, 23200, 29000]], }; // =============================================================================== type Rectangle = [number, number, number, number]; for (const room of Object.keys(rooms) as (keyof typeof rooms)[]) { createState(`Staubsauger.${room}`, { type: "boolean", read: true, write: true, role: "switch", name: `${room} saugen`, }); on({ id: `javascript.${instance}.Staubsauger.${room}`, val: true, ack: false }, async () => { if (getState(idVacuumState).val !== 8) await cancelCurrentAction(); cleanRoom(room); }); } createState(`Staubsauger.stop`, { type: "boolean", read: true, write: true, role: "switch", name: `Staubsauger anhalten`, }); on({ id: `javascript.${instance}.Staubsauger.stop`, val: true, ack: false }, () => { stopCleanup(); }); // Reset all control states when the vacuum starts charging on({ id: idVacuumState, val: 8 /* charging */ }, (obj) => { for (const room of Object.keys(rooms) as (keyof typeof rooms)[]) { setState(`Staubsauger.${room}`, false, true); } setState(`Staubsauger.stop`, false, true); }); async function cancelCurrentAction(): Promise<void> { setState("mihome-vacuum.0.control.pause", true); // wait for the "paused" status before going home await waitForPauseOrSleep(); } async function stopCleanup(): Promise<void> { log(`Saugvorgang abgebrochen!`); setState(`Staubsauger.stop`, true, true); if (getState(idVacuumState).val !== 8) { await cancelCurrentAction(); await setStateAsync('mihome-vacuum.0.control.home', true); // wait for the "charging" status before resolving await waitFor(idVacuumState, 8); } log(`Staubsauger ist in der Basis`); setState(`Staubsauger.stop`, false, true); } async function cleanRoom(room: keyof typeof rooms): Promise<void> { log(`Saugvorgang für ${room} gestartet!`); setState(`Staubsauger.${room}`, true, true); const roomCoords = rooms[room]; const coords = roomCoords[0]; const targetCoords = [ ((coords[0] + coords[2]) / 2).toFixed(0), ((coords[1] + coords[3]) / 2).toFixed(0), ] // go to center of first zone const gotoString = targetCoords.join(","); await setStateAsync("mihome-vacuum.0.control.goTo", gotoString); log(`Fahre zur Mitte von ${room}`); await wait(10000); await waitForPauseOrSleep(); if (getState("Staubsauger.stop").val) return; const zoneCleanString = roomCoords.map(zone => { return "[" + zone.concat(1).map(coord => coord.toString()).join(",") + "]"; }).join(","); log("Starte Zonenreinigung..."); await setStateAsync("mihome-vacuum.0.control.zoneClean", zoneCleanString); // wait for the cleanup to finish await waitFor(idVacuumState, 6); } async function waitForPauseOrSleep(): Promise<void> { log("Warte auf Zustand schlafen oder Pause..."); switch (getState(idVacuumState).val) { case 3: case 10: log(" => Zustand bereits aktiv!"); return; default: await Promise.race([ waitFor(idVacuumState, 10), waitFor(idVacuumState, 3), ]); log(" => Zustand erreicht!"); } } function wait(ms: number): Promise<void> { return new Promise(resolve => { setTimeout(resolve, ms); }); } function waitFor(stateID: string, value: any): Promise<void> { return new Promise(resolve => { const handler = (obj: iobJS.ChangedStateObject) => { if (obj.newState.val === value) { unsubscribe(handler); resolve(); } } subscribe(stateID, handler); }) } function setStateAsync(id: string, state: any): Promise<void> { return new Promise(res => { setState(id, state, () => res()); }); }Beide Varianten legen für jeden Raum und für Stop einen State an, den du dann jeweils mit einer Alexa-Routine ansprechen kannst.
@AlCalzone Vielen Dank.
Ich probiere gerade noch was anderes:
Alexa reagiert und spricht den Text.
Egal wie ich die Koordinaten eingebe. Der S50 macht keinen Mucks.
GFebe ich nur die ersten beiden Punkte ohne Klammern aber mit Komma an fährt er aus der Ladestation, irrt etwas umher und sagt dann er kann nicht zum Ziel fahren.Man müsste doch in den GoToPoint Datenpunkt direkt die Koordinate reinschreiben können?!
Habe alles probiert. Mit Klammern, ohne ... mit Kommas
Gebe ich ihm nur die ersten beiden Zahlen fährt er aus der Docking Station irrt kurz umher und sagt dann er kann nicht an die Koordinate fahren.
Im Log finde ich immer nur: GoTo only work with two arguments seperated by
LG Martin
-
@AlCalzone Vielen Dank.
Ich probiere gerade noch was anderes:
Alexa reagiert und spricht den Text.
Egal wie ich die Koordinaten eingebe. Der S50 macht keinen Mucks.
GFebe ich nur die ersten beiden Punkte ohne Klammern aber mit Komma an fährt er aus der Ladestation, irrt etwas umher und sagt dann er kann nicht zum Ziel fahren.Man müsste doch in den GoToPoint Datenpunkt direkt die Koordinate reinschreiben können?!
Habe alles probiert. Mit Klammern, ohne ... mit Kommas
Gebe ich ihm nur die ersten beiden Zahlen fährt er aus der Docking Station irrt kurz umher und sagt dann er kann nicht an die Koordinate fahren.
Im Log finde ich immer nur: GoTo only work with two arguments seperated by
LG Martin
@kaiserm Ich darf natürlich nur X und Y angeben.
Mit flolevac habe ich die Zone beim Mülleimer bestimmt:
32315,28722,32815,29222
Ich dachte ich muss nun nur 32315,28722 für den Zielpunkt angeben.
Aber da spackt er nur dumm rum und sagt dann er kann nicht an die Koordinate fahren. -
@kaiserm Ich darf natürlich nur X und Y angeben.
Mit flolevac habe ich die Zone beim Mülleimer bestimmt:
32315,28722,32815,29222
Ich dachte ich muss nun nur 32315,28722 für den Zielpunkt angeben.
Aber da spackt er nur dumm rum und sagt dann er kann nicht an die Koordinate fahren. -
@kaiserm Das ist die obere linke Ecke des Rechtecks. Liegt die ggf. hinter dem Mülleimer oder in einer Wand? Dann kann er da nicht hinfahren. Du brauchst die Koordinaten, wo der Sauger stehen würde, wenn er vor dem Mülleimer anhält.
@AlCalzone Ich habe mir in der erstellten Karte das kleinstmögliche Rechteck in flolevac aufgezogen und diese Koordinaten übernommen. Der S50 fährt nicht mal ansatzweise in diese Richtung sondern irrt irgendwie nur um den Startpunkt herum.
-
@AlCalzone Ich habe mir in der erstellten Karte das kleinstmögliche Rechteck in flolevac aufgezogen und diese Koordinaten übernommen. Der S50 fährt nicht mal ansatzweise in diese Richtung sondern irrt irgendwie nur um den Startpunkt herum.
@kaiserm Kenn er denn die komplette Karte? Ist der gewünschte Punkt etwa 7 Meter rechts und 3 Meter oben vom Dock aus? Kannst du ggf. mit der App nachvollziehen, wo er hin will, ob das stimmt und warum er so dumm fährt? War ggf. eine Tür zu beim Erstellen der Karte?
-
@kaiserm Kenn er denn die komplette Karte? Ist der gewünschte Punkt etwa 7 Meter rechts und 3 Meter oben vom Dock aus? Kannst du ggf. mit der App nachvollziehen, wo er hin will, ob das stimmt und warum er so dumm fährt? War ggf. eine Tür zu beim Erstellen der Karte?
@AlCalzone Ganz komisch.
Soeben nochmal getestet. Nun fuhr er brav bis vor den Mülleimer.Keine Ahnung was da schiefgelaufen ist.
LG Martin
-
@Brati sagte in Roborock S5 "cleaning area" per Tastendruck?:
Du musst ihn einmal alles reinigen lassen und einstellen, dass die Karte gespeichert wird.
Hi Brati,
wo genau kann ich sagen das die Karte gespeichert wird? Hast du evtl einen Screenshot dazu? Behält er dann auch die Karte wenn man den Sauger über den Button am Sauger startet?
Einstellungen/ Staubsaugereinstellungen/ Kartenspeichermodus on/off
Ich habe aber die russische App, sollte in der Chinaversion jedoch genauso sein. Das geht erst, wenn einmal die Karte aufgebaut wurde. Danach bleibt sie immer so erhalten.
Grüße
Brati
-
Einstellungen/ Staubsaugereinstellungen/ Kartenspeichermodus on/off
Ich habe aber die russische App, sollte in der Chinaversion jedoch genauso sein. Das geht erst, wenn einmal die Karte aufgebaut wurde. Danach bleibt sie immer so erhalten.
Grüße
Brati
-
@Stoni Genau das hätte ich auch gerne.
- Alles per Sprachbefehle.
Also z.B. Alexa, sauge das Esszimmer oder Alexa, sauge das Wohnzimmer
Falls alles gereinigt werden soll: Alexa, sauge die Wohnung.
Für die Reinigung / Wartung wäre es ideal wenn ich Alexa sagen könnte: Alexa, fahre Hugo (so heisst unser S50) zum Mülleimer.
Wie macht man das ?
Ok, die Zonen der Zimmer oder Bereiche, also Wohnzimmer, Esszimmer, Mülleimer,...) bekommt man ja in der Flolevac App.Muss man für die komplette Wohnung die Zone über alles ziehen?
Was macht man dann mit den ermittelten Zonen?
Wo müssen die eingebunden werden damit alles per Sprache läuft?Wenn er vor dem Mülleimer steht und gereinigt wurde müsste man ihn ja mit Alexa, fahre Hugo zur Ladestation zurückschicken können?
Weitere Befehle: Alexa, pausiere Saugvorgang oder Alexa, beende Saugvorgang.
Was gibt man da wo an ?
Man kann ja im Alexa2 Adapter in der Summary immer den letzten Befehl sehen, also kann man darauf triggern und eine Szene abspielen lassen?
Danke im Voraus.
LG Martin
@kaiserm sagte in Roborock S5 "cleaning area" per Tastendruck?:
@Stoni Genau das hätte ich auch gerne.
- Alles per Sprachbefehle.
Also z.B. Alexa, sauge das Esszimmer oder Alexa, sauge das Wohnzimmer
Falls alles gereinigt werden soll: Alexa, sauge die Wohnung.
Für die Reinigung / Wartung wäre es ideal wenn ich Alexa sagen könnte: Alexa, fahre Hugo (so heisst unser S50) zum Mülleimer.
Wie macht man das ?
Ok, die Zonen der Zimmer oder Bereiche, also Wohnzimmer, Esszimmer, Mülleimer,...) bekommt man ja in der Flolevac App.Muss man für die komplette Wohnung die Zone über alles ziehen?
Was macht man dann mit den ermittelten Zonen?
Wo müssen die eingebunden werden damit alles per Sprache läuft?Wenn er vor dem Mülleimer steht und gereinigt wurde müsste man ihn ja mit Alexa, fahre Hugo zur Ladestation zurückschicken können?
Weitere Befehle: Alexa, pausiere Saugvorgang oder Alexa, beende Saugvorgang.
Was gibt man da wo an ?
Man kann ja im Alexa2 Adapter in der Summary immer den letzten Befehl sehen, also kann man darauf triggern und eine Szene abspielen lassen?
Danke im Voraus.
LG Martin
Einfach nach der Anleitung aus dem Roboter Forum vorgehen. Dort ist alles im Detail beschrieben.
Ich habe in der Alexa App Routinen erstellt wo ich selber sage "Alexa, mach das Haus sauber" und dann eine Szene, die ich per Cloud Adapter als "Gerät" angelegt habe, gestartet.
Funzt bis heute einwandfrei. Das geht natürlich auch mit Teilbereichen wie Esszimmer, Wohnzimmer oder Flur.
Wichtig ist, den Robo nur noch auf diese Weise los zu schicken und nicht mehr einfach reinigen zu lassen. Sonst baut er die Karte neu auf und die Koordinaten stimmen ggf. nicht mehr. - Alles per Sprachbefehle.
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
447
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge