

Test DreameHome: 3D-Visualisierung und Alexa-Steuerung
-
[2.0.1] - 2026-04-10
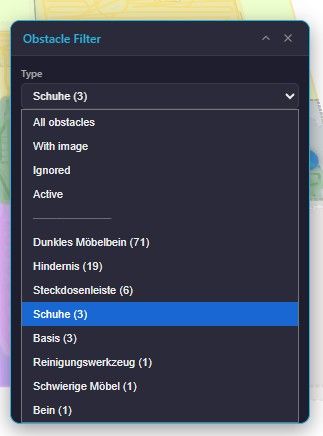
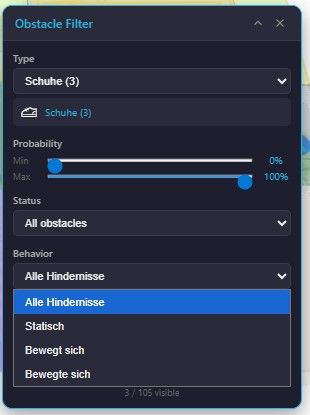
Added: Obstacle filter panel with draggable UI (EN/DE) | Verschiebbares Obstacle-Filter-Panel (EN/DE)
Changed: Initial history load: 50 → 25 entries | Initialer History-Load: 50 → 25 Einträge
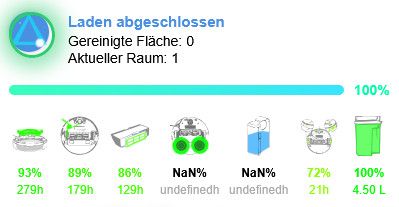
Fixed: Map generation now correctly handles empty or invalid walls_info structures | Kartenerstellung (Danke an @MrHenker27)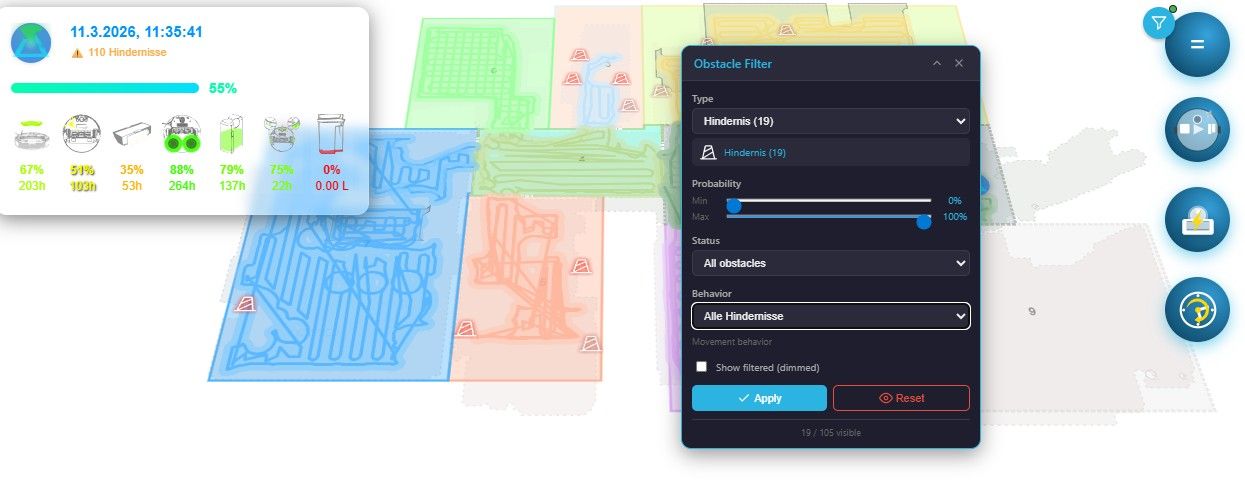
-
 H Homoran verschob dieses Thema von Tester am
H Homoran verschob dieses Thema von Tester am
-
So,
jetzt ;)
gefundene "Fehler" 2
-
Raumnamen sind nicht verfügbar
-
Robby steht nach beendigung an letzter Stelle und Raumnummern stehen durch das drehen auf dem Kopf.
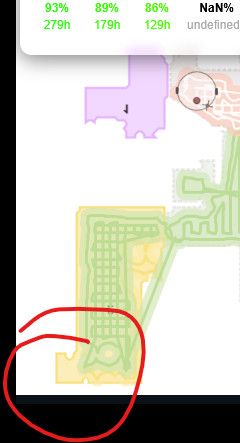
(er hätte hier her gemusst)
Verbesserungsvorschläge:
das Menü oben "frei stellen" das man die Karte extra hat. Ggf. als zweites HTML Widget
oder die Katen so ablegen, das man sie bei dreamehome.0.xxx.map.0.MapImage einbinden könnte. Ein Backend hatte ich ja schon mal gebastelt
im Backend könnte man ein Schalter setzten der dreamehome.0.xxx.map.NewMap auf true setzt, dann muss man nicht den DP selber anwählen um die Karte neu zu generieren.
-
-
H Homoran verschob dieses Thema von ...nicht in offiziellem Repo am
-
Roboter: Dreame D10s
Besonderheit (?): unterstützt mehrere verschiedene StockwerkeHi, erstmal danke für Deine Zeit, die du bereits in diesen Adapter rein gesteckt hast.
Nachdem mir - ich glaube, Anfang des Jahres - mit der damaligen Version keine Karte im vis angezeigt wurde, hatte ich den Adapter erstmal einige Zeit zur Seite gelegt, insbesondere weil ich in der Vergangenheit schon mit manchen Lösungen mit meinem D10s Probleme hatte, diesen korrekt einzubinden.Habe in den vergangenen Tagen den Adapter auf Version 2.0.1 upgegradet - und siehe da: Eine Karte wird nun angezeigt! Dafür schonmal ein riesiges Dankeschön!
Hierbei sind mir allerdings folgende Fehler aufgefallen:
- In vis wird mir die Karte gespiegelt angezeigt. Dein oben genannter Link zu einem Auswerten der cloud-Data zeigt diese hingegen korrekt an:
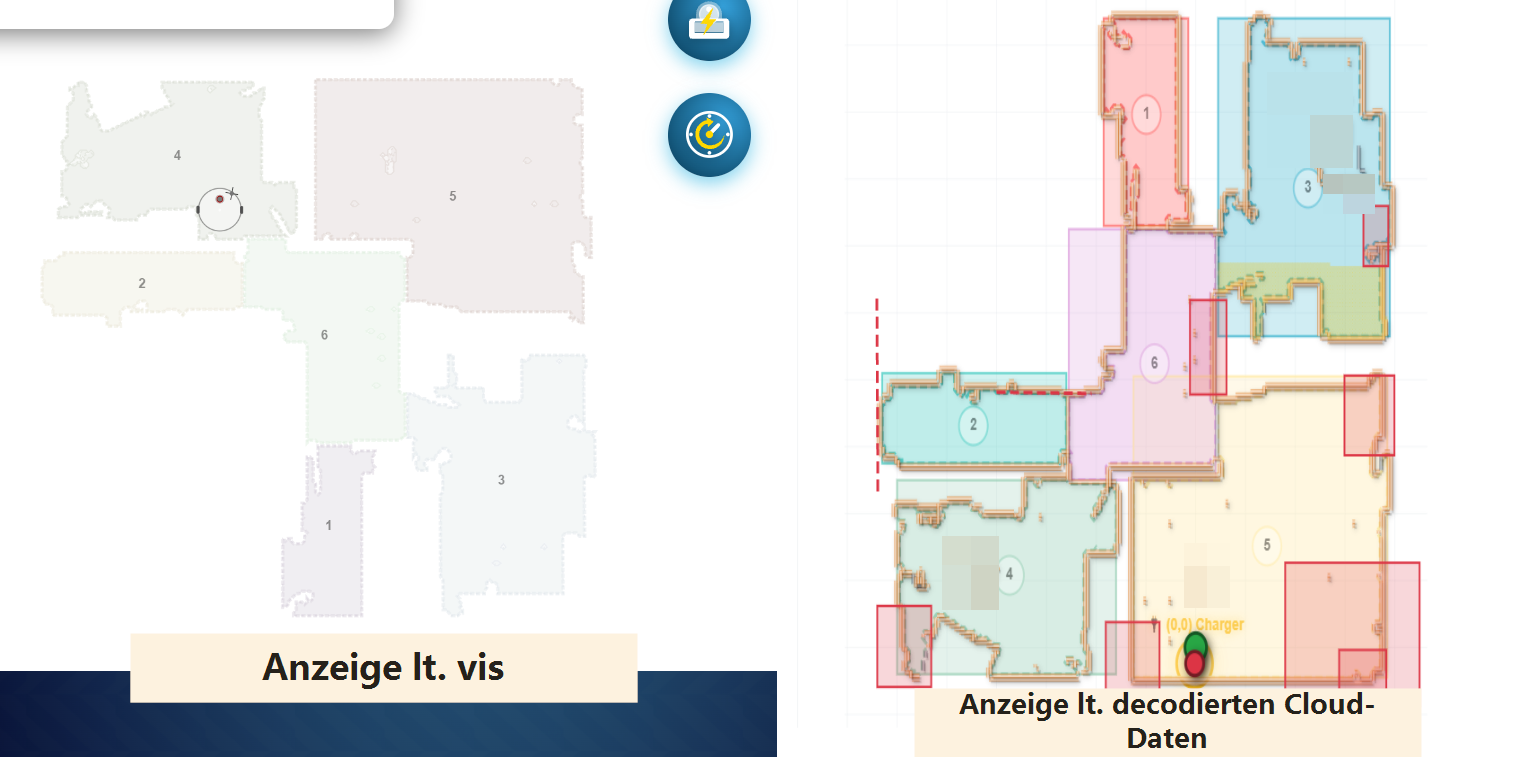
Als - wie ich hoffe/annehme - einfacher Workaround dürfte eine Option in iobroker, die Karte zu spiegeln sein, in Kombination mit css "scaleX(-1)" oder "scaleY(-1)" in deinem html-Widget möglich sein.
Ausgabe Deines Auswertungstools:
1773680347639-dreame-map-analysis-tool.html:3296 ========== DECODE MAP START ========== 1773680347639-dreame-map-analysis-tool.html:3297 Input received: eF7tmUuO47gBhj1xVyHbXKHWKqAsl1X2rLPJEYJGYRZJJ-hgph... 1773680347639-dreame-map-analysis-tool.html:3298 AES Key provided: no 1773680347639-dreame-map-analysis-tool.html:3299 AES IV provided: no 1773680347639-dreame-map-analysis-tool.html:3314 Step 1: Starting data processing 1773680347639-dreame-map-analysis-tool.html:3319 Base64 string prepared, length: 3112 1773680347639-dreame-map-analysis-tool.html:3330 Step 2: Decoding Base64... 1773680347639-dreame-map-analysis-tool.html:3332 Base64 decoded, buffer size: 2333 bytes 1773680347639-dreame-map-analysis-tool.html:3362 Step 3: No AES decryption needed 1773680347639-dreame-map-analysis-tool.html:3366 Step 4: Zlib decompression started 1773680347639-dreame-map-analysis-tool.html:3367 Compressed size: 2333 bytes 1773680347639-dreame-map-analysis-tool.html:3369 Decompression complete, decompressed size: 44695 bytes 1773680347639-dreame-map-analysis-tool.html:3378 Final buffer size: 44695 bytes 1773680347639-dreame-map-analysis-tool.html:3379 Buffer preview (first 20 bytes): 8 0 0 0 49 0 0 0 0 0 0 ea ff 11 ff 59 0 32 0 d6 1773680347639-dreame-map-analysis-tool.html:3385 Step 5: Parsing header (first 27 bytes) 1773680347639-dreame-map-analysis-tool.html:3388 Header parsed successfully: Object 1773680347639-dreame-map-analysis-tool.html:3394 Step 6: Processing pixel data 1773680347639-dreame-map-analysis-tool.html:3400 Pixel data region: 27 - 44325 1773680347639-dreame-map-analysis-tool.html:3401 Pixel dimensions: 214 x 207 = 44298 bytes 1773680347639-dreame-map-analysis-tool.html:3402 Expected pixels: 44298 1773680347639-dreame-map-analysis-tool.html:3403 Actual pixels: 44298 1773680347639-dreame-map-analysis-tool.html:3407 Extracting pixel types... 1773680347639-dreame-map-analysis-tool.html:3413 Pixel stats: Object 1773680347639-dreame-map-analysis-tool.html:3422 Extracting rooms from pixels... 1773680347639-dreame-map-analysis-tool.html:1319 🏠 Extracting rooms from pixels: 214x207, Grid: 50mm 1773680347639-dreame-map-analysis-tool.html:1338 Found room IDs: 1, 2, 3, 4, 5, 6 1773680347639-dreame-map-analysis-tool.html:1384 Found room pairs: 2-6, 4-6, 1-6, 5-6, 3-6 1773680347639-dreame-map-analysis-tool.html:1423 Found 78 boundary segments 1773680347639-dreame-map-analysis-tool.html:1536 Created 5 wall segments 1773680347639-dreame-map-analysis-tool.html:1687 ✅ Extracted 6 rooms with proper neighbor relationships 1773680347639-dreame-map-analysis-tool.html:3424 Found 6 rooms from pixel data 1773680347639-dreame-map-analysis-tool.html:3426 Extracting bound rooms from pixels... 1773680347639-dreame-map-analysis-tool.html:1709 📐 Extracting bound contours for 6 rooms... 1773680347639-dreame-map-analysis-tool.html:1750 Room 2: 205 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 4: 372 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 6: 266 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 1: 238 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 5: 404 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 3: 408 points 1773680347639-dreame-map-analysis-tool.html:3428 Found 6 bound rooms from pixel data 1773680347639-dreame-map-analysis-tool.html:3430 Extracting walls from pixels... 1773680347639-dreame-map-analysis-tool.html:1785 🧱 Extracting true walls (outer & inner) from 214x207 pixels... 1773680347639-dreame-map-analysis-tool.html:1880 → 6764 edge pixels found (outer + inner + walls) 1773680347639-dreame-map-analysis-tool.html:2010 → 504 final walls (504 raw lines) 1773680347639-dreame-map-analysis-tool.html:3432 Wall extraction: 504 walls found 1773680347639-dreame-map-analysis-tool.html:3446 Step 7: Processing JSON data 1773680347639-dreame-map-analysis-tool.html:3448 JSON data starts at byte: 44325 1773680347639-dreame-map-analysis-tool.html:3454 JSON data size: 370 bytes 1773680347639-dreame-map-analysis-tool.html:3455 JSON preview: {"vw":{"line":[[-6406,5215,-6386,2252],[-4003,3814,-2093,3795]],"rect":[[2988,2872,3992,4063],[2882,-641,3829,-36],[-6399,-590,-5314,621],[-116,3780,618,5191],[3369,5698,3869,6597],[-1807,-904,-727,37... 1773680347639-dreame-map-analysis-tool.html:3460 Parsing JSON... 1773680347639-dreame-map-analysis-tool.html:3462 JSON parsed successfully 1773680347639-dreame-map-analysis-tool.html:3463 JSON top-level keys: Array(2) 1773680347639-dreame-map-analysis-tool.html:3465 Enhancing JSON with pixel contours... 1773680347639-dreame-map-analysis-tool.html:2406 📋 No storeys structure found - generating from pixel data... 1773680347639-dreame-map-analysis-tool.html:2452 ✅ 6 rooms from pixel data added 1773680347639-dreame-map-analysis-tool.html:3468 JSON enhancement complete 1773680347639-dreame-map-analysis-tool.html:3470 Extracting JSON data... 1773680347639-dreame-map-analysis-tool.html:3472 JSON extraction complete. Stats: Object 1773680347639-dreame-map-analysis-tool.html:3500 Step 8: Final processing 1773680347639-dreame-map-analysis-tool.html:3505 Step 9: Rendering map 1773680347639-dreame-map-analysis-tool.html:3509 ========== DECODE MAP COMPLETE ==========- Die Karte und history-Funktion kann ich jedoch aus folgendem weiteren Problem nicht testen: Mein Roboter D10s unterstützt mehrere Stockwerke, die von deinem Adapter (bis auf die gespiegelte Darstellung) korrekt ausgelesen werden. Allerdings bekomme ich es nicht hin, dass mir für mein Haupt-Stockwerk die korrekte vis-Darstellung in vishtml0 dargestellt wird (dort findet sich die Karte für Stockwerk 0, das Hauptstockwerk ist Stockwerk 1 oder 2). vishtml1 bzw. vishtml2 wird jedoch vom Adapter zwar erzeugt, aber nicht befüllt:

Kannst Dur mir einen Tipp geben, wo ich diese beiden weiteren vishtml's erzeugen lassen kann?
Vielen Dank für Deine Arbeit an diesem Adapter - ich hatte bislang allein für die Einbindung einer Kartenfunktion einen zusätzlichen HomeAssistant-Instanz laufen, die ich dank Deinem Adapter perspektivisch abschalten kann.
- In vis wird mir die Karte gespiegelt angezeigt. Dein oben genannter Link zu einem Auswerten der cloud-Data zeigt diese hingegen korrekt an:
-
hallo, hab einen dreame Aqua 10 complete. ich nutze deine adapter vor wiegend für die daten, vis usw ist weniger interessant für mich vor auch da vis2 ja auch nicht funktioniert?
jedenfalls mit der Version 2.0.1 hab ich folgenden Fehler der absolut immer kommt wenn der Roboter sich bewegt
[TR POS] No points available, parsing directlyweiters kam in der admin diese Fehlermeldung
dreamehome has an invalid jsonConfig: [{"instancePath":"/items/deviceSelection/items/selectedDeviceIndex","schemaPath":"#/additionalProperties","keyword":"additionalProperties","params":{"additionalProperty":"hint"},"message":"must NOT have additional properties"},{"instancePath":"/items/deviceSelection/items/selectedDeviceIndex","schemaPath":"#/patternProperties/%5E.%2B/allOf/21/if","keyword":"if","params":{"failingKeyword":"then"},"message":"must match \"then\" schema"},{"instancePath":"/items/deviceSelection","schemaPath":"#/properties/items/patternProperties/%5E.%2B/allOf/11/if","keyword":"if","params":{"failingKeyword":"then"},"message":"must match \"then\" schema"},{"instancePath":"","schemaPath":"#/if","keyword":"if","params":{"failingKeyword":"then"},"message":"must match \"then\" schema"}]cool wäre ein Möglichkeit Kurzbefehle direkt über einen Datenpunkt auswählen/starten zu können.
danke für deine Arbeit
-
Sauge Raum XYZ funktioniert über Datenpunkt.
-
Ich habe das Problem, das ich in den Einstellungen über die View zwar Roboterkomponenten ausblenden kann (werden nicht unterstützt), aber beim reload ist wieder alles beim alten.
Auch ein Editieren der Datenpunkte in IOBroker brachte keine Besserung. Nach Neustart des Adapters sind sie wieder da.
Kein Problem, aber eine gute Option, oder doch ein Bug?
Ich kann den Hintergrund nicht ändern. Egal was ich einstelle, es wird das Hardcodierte übernommen.
Testweise die Codierung editiert, und schon ist mein Hintergrund Transparent (wie ich es gerne hätte).
Vielleicht könntest da mal schauen.
Ansonsten finde ich super, was du aus den Daten zauberst. -
So,
jetzt ;)
gefundene "Fehler" 2
-
Raumnamen sind nicht verfügbar
-
Robby steht nach beendigung an letzter Stelle und Raumnummern stehen durch das drehen auf dem Kopf.
(er hätte hier her gemusst)
Verbesserungsvorschläge:
das Menü oben "frei stellen" das man die Karte extra hat. Ggf. als zweites HTML Widget
oder die Katen so ablegen, das man sie bei dreamehome.0.xxx.map.0.MapImage einbinden könnte. Ein Backend hatte ich ja schon mal gebastelt
im Backend könnte man ein Schalter setzten der dreamehome.0.xxx.map.NewMap auf true setzt, dann muss man nicht den DP selber anwählen um die Karte neu zu generieren.
@MrHenker27 Danke dir für den Hinweis 👍
Raumnamen nicht verfügbar
Das ist tatsächlich ein Bug im Adapter. Die Raumnamen werden zwar korrekt aus den Wand-/Mapdaten (inkl. Pixeln) gezogen und für die Kartenerstellung verwendet, aber aktuell nicht in die Datenpunkte zurückgeschrieben bzw. aktualisiert.
→ Fixe ich, sodass die Namen auch sauber in den States landen.Robby Position / letzte Stelle
Schaue ich mir parallel an – könnte ebenfalls mit der Aktualisierung bzw. Mapping der Daten zusammenhängen.Raumnummern bei Rotation
Ist ein Transform-Thema, steht auf der Liste.
Zu deinen Vorschlägen:
- Map getrennt vom Menü / eigenes Widget → finde ich sinnvoll.
- NewMap Trigger per Button → baue ich ein, macht die Bedienung deutlich angenehmer
Danke dir fürs Feedback 👍
-
-
Roboter: Dreame D10s
Besonderheit (?): unterstützt mehrere verschiedene StockwerkeHi, erstmal danke für Deine Zeit, die du bereits in diesen Adapter rein gesteckt hast.
Nachdem mir - ich glaube, Anfang des Jahres - mit der damaligen Version keine Karte im vis angezeigt wurde, hatte ich den Adapter erstmal einige Zeit zur Seite gelegt, insbesondere weil ich in der Vergangenheit schon mit manchen Lösungen mit meinem D10s Probleme hatte, diesen korrekt einzubinden.Habe in den vergangenen Tagen den Adapter auf Version 2.0.1 upgegradet - und siehe da: Eine Karte wird nun angezeigt! Dafür schonmal ein riesiges Dankeschön!
Hierbei sind mir allerdings folgende Fehler aufgefallen:
- In vis wird mir die Karte gespiegelt angezeigt. Dein oben genannter Link zu einem Auswerten der cloud-Data zeigt diese hingegen korrekt an:
Als - wie ich hoffe/annehme - einfacher Workaround dürfte eine Option in iobroker, die Karte zu spiegeln sein, in Kombination mit css "scaleX(-1)" oder "scaleY(-1)" in deinem html-Widget möglich sein.
Ausgabe Deines Auswertungstools:
1773680347639-dreame-map-analysis-tool.html:3296 ========== DECODE MAP START ========== 1773680347639-dreame-map-analysis-tool.html:3297 Input received: eF7tmUuO47gBhj1xVyHbXKHWKqAsl1X2rLPJEYJGYRZJJ-hgph... 1773680347639-dreame-map-analysis-tool.html:3298 AES Key provided: no 1773680347639-dreame-map-analysis-tool.html:3299 AES IV provided: no 1773680347639-dreame-map-analysis-tool.html:3314 Step 1: Starting data processing 1773680347639-dreame-map-analysis-tool.html:3319 Base64 string prepared, length: 3112 1773680347639-dreame-map-analysis-tool.html:3330 Step 2: Decoding Base64... 1773680347639-dreame-map-analysis-tool.html:3332 Base64 decoded, buffer size: 2333 bytes 1773680347639-dreame-map-analysis-tool.html:3362 Step 3: No AES decryption needed 1773680347639-dreame-map-analysis-tool.html:3366 Step 4: Zlib decompression started 1773680347639-dreame-map-analysis-tool.html:3367 Compressed size: 2333 bytes 1773680347639-dreame-map-analysis-tool.html:3369 Decompression complete, decompressed size: 44695 bytes 1773680347639-dreame-map-analysis-tool.html:3378 Final buffer size: 44695 bytes 1773680347639-dreame-map-analysis-tool.html:3379 Buffer preview (first 20 bytes): 8 0 0 0 49 0 0 0 0 0 0 ea ff 11 ff 59 0 32 0 d6 1773680347639-dreame-map-analysis-tool.html:3385 Step 5: Parsing header (first 27 bytes) 1773680347639-dreame-map-analysis-tool.html:3388 Header parsed successfully: Object 1773680347639-dreame-map-analysis-tool.html:3394 Step 6: Processing pixel data 1773680347639-dreame-map-analysis-tool.html:3400 Pixel data region: 27 - 44325 1773680347639-dreame-map-analysis-tool.html:3401 Pixel dimensions: 214 x 207 = 44298 bytes 1773680347639-dreame-map-analysis-tool.html:3402 Expected pixels: 44298 1773680347639-dreame-map-analysis-tool.html:3403 Actual pixels: 44298 1773680347639-dreame-map-analysis-tool.html:3407 Extracting pixel types... 1773680347639-dreame-map-analysis-tool.html:3413 Pixel stats: Object 1773680347639-dreame-map-analysis-tool.html:3422 Extracting rooms from pixels... 1773680347639-dreame-map-analysis-tool.html:1319 🏠 Extracting rooms from pixels: 214x207, Grid: 50mm 1773680347639-dreame-map-analysis-tool.html:1338 Found room IDs: 1, 2, 3, 4, 5, 6 1773680347639-dreame-map-analysis-tool.html:1384 Found room pairs: 2-6, 4-6, 1-6, 5-6, 3-6 1773680347639-dreame-map-analysis-tool.html:1423 Found 78 boundary segments 1773680347639-dreame-map-analysis-tool.html:1536 Created 5 wall segments 1773680347639-dreame-map-analysis-tool.html:1687 ✅ Extracted 6 rooms with proper neighbor relationships 1773680347639-dreame-map-analysis-tool.html:3424 Found 6 rooms from pixel data 1773680347639-dreame-map-analysis-tool.html:3426 Extracting bound rooms from pixels... 1773680347639-dreame-map-analysis-tool.html:1709 📐 Extracting bound contours for 6 rooms... 1773680347639-dreame-map-analysis-tool.html:1750 Room 2: 205 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 4: 372 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 6: 266 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 1: 238 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 5: 404 points 1773680347639-dreame-map-analysis-tool.html:1750 Room 3: 408 points 1773680347639-dreame-map-analysis-tool.html:3428 Found 6 bound rooms from pixel data 1773680347639-dreame-map-analysis-tool.html:3430 Extracting walls from pixels... 1773680347639-dreame-map-analysis-tool.html:1785 🧱 Extracting true walls (outer & inner) from 214x207 pixels... 1773680347639-dreame-map-analysis-tool.html:1880 → 6764 edge pixels found (outer + inner + walls) 1773680347639-dreame-map-analysis-tool.html:2010 → 504 final walls (504 raw lines) 1773680347639-dreame-map-analysis-tool.html:3432 Wall extraction: 504 walls found 1773680347639-dreame-map-analysis-tool.html:3446 Step 7: Processing JSON data 1773680347639-dreame-map-analysis-tool.html:3448 JSON data starts at byte: 44325 1773680347639-dreame-map-analysis-tool.html:3454 JSON data size: 370 bytes 1773680347639-dreame-map-analysis-tool.html:3455 JSON preview: {"vw":{"line":[[-6406,5215,-6386,2252],[-4003,3814,-2093,3795]],"rect":[[2988,2872,3992,4063],[2882,-641,3829,-36],[-6399,-590,-5314,621],[-116,3780,618,5191],[3369,5698,3869,6597],[-1807,-904,-727,37... 1773680347639-dreame-map-analysis-tool.html:3460 Parsing JSON... 1773680347639-dreame-map-analysis-tool.html:3462 JSON parsed successfully 1773680347639-dreame-map-analysis-tool.html:3463 JSON top-level keys: Array(2) 1773680347639-dreame-map-analysis-tool.html:3465 Enhancing JSON with pixel contours... 1773680347639-dreame-map-analysis-tool.html:2406 📋 No storeys structure found - generating from pixel data... 1773680347639-dreame-map-analysis-tool.html:2452 ✅ 6 rooms from pixel data added 1773680347639-dreame-map-analysis-tool.html:3468 JSON enhancement complete 1773680347639-dreame-map-analysis-tool.html:3470 Extracting JSON data... 1773680347639-dreame-map-analysis-tool.html:3472 JSON extraction complete. Stats: Object 1773680347639-dreame-map-analysis-tool.html:3500 Step 8: Final processing 1773680347639-dreame-map-analysis-tool.html:3505 Step 9: Rendering map 1773680347639-dreame-map-analysis-tool.html:3509 ========== DECODE MAP COMPLETE ==========- Die Karte und history-Funktion kann ich jedoch aus folgendem weiteren Problem nicht testen: Mein Roboter D10s unterstützt mehrere Stockwerke, die von deinem Adapter (bis auf die gespiegelte Darstellung) korrekt ausgelesen werden. Allerdings bekomme ich es nicht hin, dass mir für mein Haupt-Stockwerk die korrekte vis-Darstellung in vishtml0 dargestellt wird (dort findet sich die Karte für Stockwerk 0, das Hauptstockwerk ist Stockwerk 1 oder 2). vishtml1 bzw. vishtml2 wird jedoch vom Adapter zwar erzeugt, aber nicht befüllt:
Kannst Dur mir einen Tipp geben, wo ich diese beiden weiteren vishtml's erzeugen lassen kann?
Vielen Dank für Deine Arbeit an diesem Adapter - ich hatte bislang allein für die Einbindung einer Kartenfunktion einen zusätzlichen HomeAssistant-Instanz laufen, die ich dank Deinem Adapter perspektivisch abschalten kann.
@homsy danke dir für das ausführliche Feedback und die Infos zum D10s.
Freut mich erstmal, dass die Karte mit 2.0.1 jetzt grundsätzlich angezeigt wird 😊
Zur gespiegelten Darstellung in VIS:
Das Problem sitzt tiefer in der Verarbeitung der Rohdaten:
Die Dreame-Cloud liefert ein Koordinatensystem, bei dem die Y-Achse invertiert ist (positiv nach oben), während die Darstellung (Canvas/VIS) von Y nach unten ausgeht.
Dadurch entsteht die Spiegelung – und die darf nicht erst im Frontend (CSS) korrigiert werden, weil dann: Roboterposition, Räume, Overlays nicht mehr sauber zusammenpassen.
Das habe ich bereits angepasst – ist in der nächsten Version behoben 👍
Zu den mehreren Stockwerken / vishtml:
Das Verhalten ist aktuell so, dass immer nur eine Map aktiv generiert wird (standardmäßig Map 0).
Die weiterenvishtml-Instanzen werden zwar erzeugt, aber nicht automatisch befüllt.Du kannst die anderen Stockwerke so laden:
-
dreamehome.0.xxxxx.map.MapNumberauf das gewünschte Stockwerk setzen- z. B.
2für die zweite Etage
- z. B.
-
danach
dreamehome.0.xxxxx.map.NewMapauftruesetzen
Dann wird diese Map generiert und das entsprechende
vishtmlbefüllt.Für weitere Stockwerke einfach wiederholen:
MapNumberändernNewMap = true
Danke dir fürs Testen und dein Feedback

- In vis wird mir die Karte gespiegelt angezeigt. Dein oben genannter Link zu einem Auswerten der cloud-Data zeigt diese hingegen korrekt an:
-
hallo, hab einen dreame Aqua 10 complete. ich nutze deine adapter vor wiegend für die daten, vis usw ist weniger interessant für mich vor auch da vis2 ja auch nicht funktioniert?
jedenfalls mit der Version 2.0.1 hab ich folgenden Fehler der absolut immer kommt wenn der Roboter sich bewegt
[TR POS] No points available, parsing directlyweiters kam in der admin diese Fehlermeldung
dreamehome has an invalid jsonConfig: [{"instancePath":"/items/deviceSelection/items/selectedDeviceIndex","schemaPath":"#/additionalProperties","keyword":"additionalProperties","params":{"additionalProperty":"hint"},"message":"must NOT have additional properties"},{"instancePath":"/items/deviceSelection/items/selectedDeviceIndex","schemaPath":"#/patternProperties/%5E.%2B/allOf/21/if","keyword":"if","params":{"failingKeyword":"then"},"message":"must match \"then\" schema"},{"instancePath":"/items/deviceSelection","schemaPath":"#/properties/items/patternProperties/%5E.%2B/allOf/11/if","keyword":"if","params":{"failingKeyword":"then"},"message":"must match \"then\" schema"},{"instancePath":"","schemaPath":"#/if","keyword":"if","params":{"failingKeyword":"then"},"message":"must match \"then\" schema"}]cool wäre ein Möglichkeit Kurzbefehle direkt über einen Datenpunkt auswählen/starten zu können.
danke für deine Arbeit
-
Sauge Raum XYZ funktioniert über Datenpunkt.
Einfach den Datenpunkt dreamehome.0.xxxxxx.control.NaturalLanguageCommand befüllen:
"saug die Küche"
"wisch das Bad"
"saug das Wohnzimmer zweimal"
"saug die Küche leise"
"saug die Küche standard"
"saug die Küche stark"
"saug die Küche turbo"
"wisch das Bad niedrig"
"wisch das Bad mittel"
"wisch das Bad hoch"Kombinierte Raum-Befehle
"saug die Küche zweimal und wisch das Bad"
"saug die Küche leise und wisch das Bad hoch"
"saug die Küche dreimal und wisch das Bad zweimal"Oder einfacher: über Alexa oder Telegram 🙂
-
hallo, hab einen dreame Aqua 10 complete. ich nutze deine adapter vor wiegend für die daten, vis usw ist weniger interessant für mich vor auch da vis2 ja auch nicht funktioniert?
jedenfalls mit der Version 2.0.1 hab ich folgenden Fehler der absolut immer kommt wenn der Roboter sich bewegt
[TR POS] No points available, parsing directlyweiters kam in der admin diese Fehlermeldung
dreamehome has an invalid jsonConfig: [{"instancePath":"/items/deviceSelection/items/selectedDeviceIndex","schemaPath":"#/additionalProperties","keyword":"additionalProperties","params":{"additionalProperty":"hint"},"message":"must NOT have additional properties"},{"instancePath":"/items/deviceSelection/items/selectedDeviceIndex","schemaPath":"#/patternProperties/%5E.%2B/allOf/21/if","keyword":"if","params":{"failingKeyword":"then"},"message":"must match \"then\" schema"},{"instancePath":"/items/deviceSelection","schemaPath":"#/properties/items/patternProperties/%5E.%2B/allOf/11/if","keyword":"if","params":{"failingKeyword":"then"},"message":"must match \"then\" schema"},{"instancePath":"","schemaPath":"#/if","keyword":"if","params":{"failingKeyword":"then"},"message":"must match \"then\" schema"}]cool wäre ein Möglichkeit Kurzbefehle direkt über einen Datenpunkt auswählen/starten zu können.
danke für deine Arbeit
@krobi
Der erste Punkt ist aktuell nur Debug-Output. Er tritt auf, wenn der Roboter aktiv reinigt, aber den definierten Reinigungsbereich noch nicht erreicht hat. In diesem Zustand sind die Positionsdaten nicht über MQTT verfügbar, sondern nur über die Cloud. Das werde ich in einer der nächsten Versionen deaktivieren bzw. bereinigen.Der zweite Punkt ist tatsächlich ein Bug, der nur in bestimmten ioBroker-Versionen auftritt. Ursache ist, dass ich im jsonConfig.json fälschlicherweise das Attribut hint anstelle von description verwendet habe. Das werde ich ebenfalls fixen.
Zu deinem eigentlichen Fehler:
[TR POS] No points available, parsing directlyDer kommt aktuell immer, wenn sich der Roboter bewegt, ist aber eher als Hinweis zu verstehen und nicht kritisch. Auch hier werde ich das Logging noch anpassen, damit das nicht dauerhaft erscheint.
Die Fehlermeldung im Admin:
dreamehome has an invalid jsonConfig: ...hängt direkt mit dem oben genannten hint-Problem zusammen und verschwindet mit dem Fix.
-
@MrHenker27 Danke dir für den Hinweis 👍
Raumnamen nicht verfügbar
Das ist tatsächlich ein Bug im Adapter. Die Raumnamen werden zwar korrekt aus den Wand-/Mapdaten (inkl. Pixeln) gezogen und für die Kartenerstellung verwendet, aber aktuell nicht in die Datenpunkte zurückgeschrieben bzw. aktualisiert.
→ Fixe ich, sodass die Namen auch sauber in den States landen.Robby Position / letzte Stelle
Schaue ich mir parallel an – könnte ebenfalls mit der Aktualisierung bzw. Mapping der Daten zusammenhängen.Raumnummern bei Rotation
Ist ein Transform-Thema, steht auf der Liste.
Zu deinen Vorschlägen:
- Map getrennt vom Menü / eigenes Widget → finde ich sinnvoll.
- NewMap Trigger per Button → baue ich ein, macht die Bedienung deutlich angenehmer
Danke dir fürs Feedback 👍
@wawyo gibt es den schon was neues vom Adapter?
greets
-
meine
dreamehome.0.xxxvis.vishtml0ist leer. Jemand eine Idee woran es liegen könnte. Habe einen Dream 10s pro -
Da haben vermutlich nur mehr das Problem
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
432
Online33.0k
Benutzer83.5k
Themen1.3m
Beiträge