

Verständnisfrage: Virtuelle Schalter und nutzen in Blockly
-
Puhhh,
hab versucht etwas zu debuggen, hab den Wert von "Position" mir anzeigen lassen, der war "True" !!Der DP war als "Status" abgelegt, habe ihn auf Level geändert (korrekt?).
Wenn das Script läuft, hört der Wert gar nicht mehr auf zu laufen, ist jetzt bei 1500%@topsurfer sagte: Wenn das Script läuft, hört der Wert gar nicht mehr auf zu laufen
Dann bleiben die DP "Up" bzw. "Down" auf true.
Folglich muss man das Intervall mit dem Kommando und mit den Endlagen stoppen.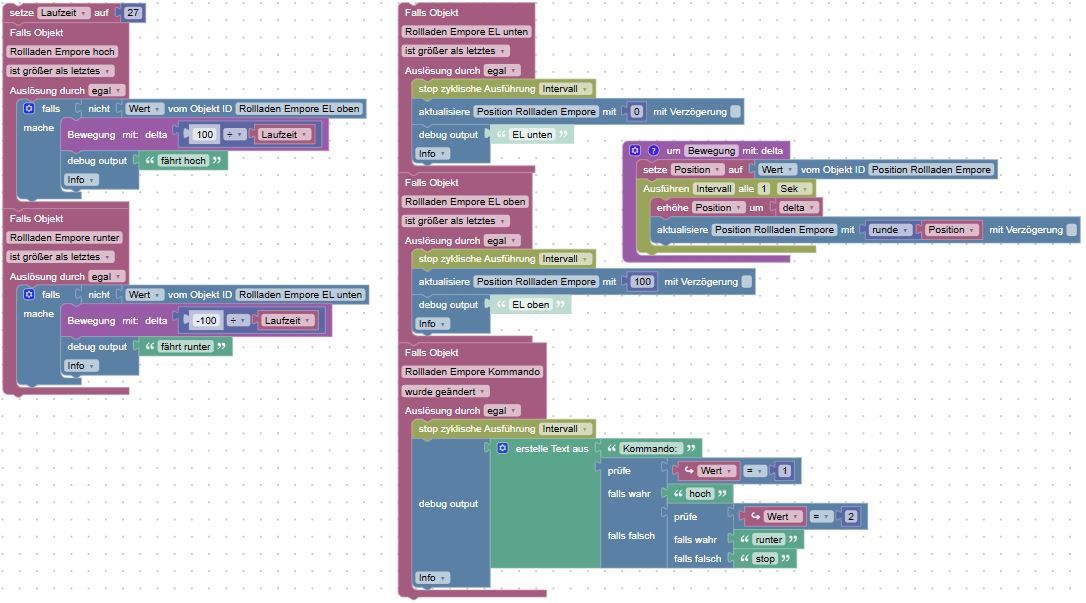
Beachte, dass die Trigger links auf "ist größer als letztes" geändert wurden.
-
Hallo,
die DP von dem Rollladen sind echt sch....
(nicht nur im Alias, sondern auch direkt bei Enocean => 0 => ...)Auch wenn die obere oder untere Endposition erreicht wurde, stehen die DP immer noch auf "false".
Den DP "TOP" habe ich schon auf "true" gesehen,dauert wohl paar Minuten (bzw. mind. 30s)."BOT" (Endpunkt unten) ist immer "false" :-(
Was man wohl auch beachten muss, dass auch die Fahrbefehle "UP" bzw. "Do(wn)" auch nach einem getätigten Stop noch auf true sind (als ob der Rollladen sich noch bewegt), das Kommando "CMD" aber korrekt "stop(0)" anzeigt. Dieses Verhalten wäre in einem Script wohl lösbar.
Anhand der Fahrzeit (die immer korrekt und schnell in TT (gefahrene Zeit) zu sehen ist und dem Check der Fahrtrichtung könnte man wohl die Höhe des Rollladen (per Script) berechnen.
Ich werde wohl jetzt aber (nach 2 Wochen) ma beginnen, die anderen Rollläden und Lichter in das System zu bekommen, und nicht noch mehr Zeit in die Positionsinfo oder dem gezielten anfahren von Rollladen (Bsp: "Fhre auf Höhe 70%") zu stecken (leider!)
Es warten halt noch Zigbee, MQTT, Netatmo usw. ..., und von einer nutzbaren Oberfläche (GUI) bin ich noch gaaaaz weit weg...
Thx an Paul! Wenn du noch Ideen hat, gerne!Evtl. macht es Sinn, Jee Cee (dem Entwickler vom Enocean-Adapter) mal zu kontaktieren, warum das erreichend er Endpunkte nicht angezeigt wird, ob es an meinen Rollläden liegt oder am Adapter.
-
Hallo,
die DP von dem Rollladen sind echt sch....
(nicht nur im Alias, sondern auch direkt bei Enocean => 0 => ...)Auch wenn die obere oder untere Endposition erreicht wurde, stehen die DP immer noch auf "false".
Den DP "TOP" habe ich schon auf "true" gesehen,dauert wohl paar Minuten (bzw. mind. 30s)."BOT" (Endpunkt unten) ist immer "false" :-(
Was man wohl auch beachten muss, dass auch die Fahrbefehle "UP" bzw. "Do(wn)" auch nach einem getätigten Stop noch auf true sind (als ob der Rollladen sich noch bewegt), das Kommando "CMD" aber korrekt "stop(0)" anzeigt. Dieses Verhalten wäre in einem Script wohl lösbar.
Anhand der Fahrzeit (die immer korrekt und schnell in TT (gefahrene Zeit) zu sehen ist und dem Check der Fahrtrichtung könnte man wohl die Höhe des Rollladen (per Script) berechnen.
Ich werde wohl jetzt aber (nach 2 Wochen) ma beginnen, die anderen Rollläden und Lichter in das System zu bekommen, und nicht noch mehr Zeit in die Positionsinfo oder dem gezielten anfahren von Rollladen (Bsp: "Fhre auf Höhe 70%") zu stecken (leider!)
Es warten halt noch Zigbee, MQTT, Netatmo usw. ..., und von einer nutzbaren Oberfläche (GUI) bin ich noch gaaaaz weit weg...
Thx an Paul! Wenn du noch Ideen hat, gerne!Evtl. macht es Sinn, Jee Cee (dem Entwickler vom Enocean-Adapter) mal zu kontaktieren, warum das erreichend er Endpunkte nicht angezeigt wird, ob es an meinen Rollläden liegt oder am Adapter.
@topsurfer sagte: Es warten halt noch Zigbee ...
Wenn du auch Zigbee verwendest, dann steuere Geräte, die mit Netzspannung betrieben werden (wie Rollladen), besser mit Zigbee-Aktoren. Enocean ist für Sensoren optimal.
-
@topsurfer sagte: Es warten halt noch Zigbee ...
Wenn du auch Zigbee verwendest, dann steuere Geräte, die mit Netzspannung betrieben werden (wie Rollladen), besser mit Zigbee-Aktoren. Enocean ist für Sensoren optimal.
@paul53 said in Verständnisfrage: Virtuelle Schalter und nutzen in Blockly:
Wenn du auch Zigbee verwendest, dann steuere Geräte, die mit Netzspannung betrieben werden (wie Rollladen), besser mit Zigbee-Aktoren. Enocean ist für Sensoren optimal.
Die Rollläden und Enocean-Ansteuerung sind vom Fertighausanbieter verbaut, da gibts bzw. gab es keine Wahl ...
-
Hmmm,
hab jetzt manuell einen neuen Alias angelegt,
und jetzt hab ich beim "Kommando" beim Typ keine Anzeige "Stop|down|up", sondern Zahlenwerte.
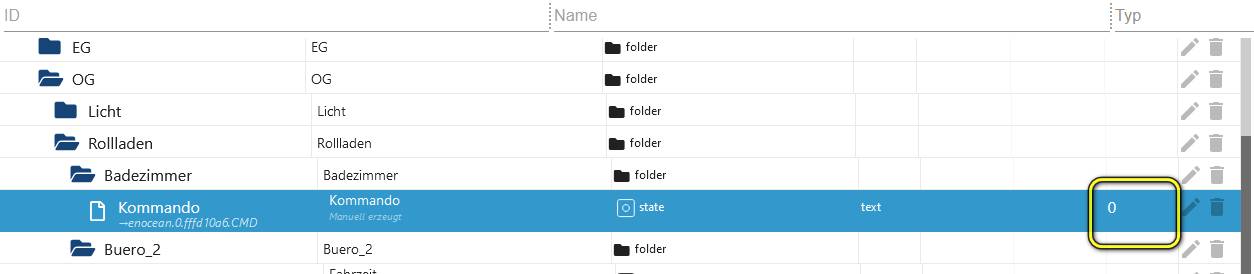
Hab auch schon bei "Zustandstyp" und "Rolle" probiert, ändert nichts.
Bei dem Enocean-Object direkt steht nach wie vor: "Stop|Up|down", nur bei den Aliasen nicht mehrZuvor hatte ich immer (?) hier Stop|up| down stehen bzw. zur Auswahl, habe ich was "umgestellt?
In den "Objektdaten steht auch nicht mehr so was drinnen, hab das aber auch zuvor nie manuell ergänzt oder eingetragen:
"states": { "0": "stop", "1": "hoch", "2": "runter" -
Hmmm,
hab jetzt manuell einen neuen Alias angelegt,
und jetzt hab ich beim "Kommando" beim Typ keine Anzeige "Stop|down|up", sondern Zahlenwerte.
Hab auch schon bei "Zustandstyp" und "Rolle" probiert, ändert nichts.
Bei dem Enocean-Object direkt steht nach wie vor: "Stop|Up|down", nur bei den Aliasen nicht mehrZuvor hatte ich immer (?) hier Stop|up| down stehen bzw. zur Auswahl, habe ich was "umgestellt?
In den "Objektdaten steht auch nicht mehr so was drinnen, hab das aber auch zuvor nie manuell ergänzt oder eingetragen:
"states": { "0": "stop", "1": "hoch", "2": "runter"@topsurfer sagte: hab das aber auch zuvor nie manuell ergänzt oder eingetragen:
Musst du aber, wenn du es so dargestellt haben möchtest.
-
@topsurfer sagte: hab das aber auch zuvor nie manuell ergänzt oder eingetragen:
Musst du aber, wenn du es so dargestellt haben möchtest.
-
Hallo,
die DP von dem Rollladen sind echt sch....
(nicht nur im Alias, sondern auch direkt bei Enocean => 0 => ...)Auch wenn die obere oder untere Endposition erreicht wurde, stehen die DP immer noch auf "false".
Den DP "TOP" habe ich schon auf "true" gesehen,dauert wohl paar Minuten (bzw. mind. 30s)."BOT" (Endpunkt unten) ist immer "false" :-(
Was man wohl auch beachten muss, dass auch die Fahrbefehle "UP" bzw. "Do(wn)" auch nach einem getätigten Stop noch auf true sind (als ob der Rollladen sich noch bewegt), das Kommando "CMD" aber korrekt "stop(0)" anzeigt. Dieses Verhalten wäre in einem Script wohl lösbar.
Anhand der Fahrzeit (die immer korrekt und schnell in TT (gefahrene Zeit) zu sehen ist und dem Check der Fahrtrichtung könnte man wohl die Höhe des Rollladen (per Script) berechnen.
Ich werde wohl jetzt aber (nach 2 Wochen) ma beginnen, die anderen Rollläden und Lichter in das System zu bekommen, und nicht noch mehr Zeit in die Positionsinfo oder dem gezielten anfahren von Rollladen (Bsp: "Fhre auf Höhe 70%") zu stecken (leider!)
Es warten halt noch Zigbee, MQTT, Netatmo usw. ..., und von einer nutzbaren Oberfläche (GUI) bin ich noch gaaaaz weit weg...
Thx an Paul! Wenn du noch Ideen hat, gerne!Evtl. macht es Sinn, Jee Cee (dem Entwickler vom Enocean-Adapter) mal zu kontaktieren, warum das erreichend er Endpunkte nicht angezeigt wird, ob es an meinen Rollläden liegt oder am Adapter.
@topsurfer sagte: Anhand der Fahrzeit (die immer korrekt und schnell in TT (gefahrene Zeit) zu sehen ist und dem Check der Fahrtrichtung könnte man wohl die Höhe des Rollladen (per Script) berechnen.
Enthält "gefahrene Zeit" immer ganze Sekunden und startet zu Fahrtbeginn mit 0?
Falls ja, versuche es mal so:
-
@topsurfer sagte: Anhand der Fahrzeit (die immer korrekt und schnell in TT (gefahrene Zeit) zu sehen ist und dem Check der Fahrtrichtung könnte man wohl die Höhe des Rollladen (per Script) berechnen.
Enthält "gefahrene Zeit" immer ganze Sekunden und startet zu Fahrtbeginn mit 0?
Falls ja, versuche es mal so:@paul53
Hi,
hab es mal versucht das Blockly korrekt nachzubauen, aber es funktioniert nicht so wie es soll, evtl. hab ich da auch noch Fehler drinnen ...
Hab jetzt alle Rollladen-Aliase angelegt, ich muss jetzt mal schauen, das ich im eigentlichen Smarthome weiterkomme (Lichter, Temperaturen, Dashboard, ...).
Die Ansteuerung der Rollläden auf Position X will ich wirklich gerne haben, dachte aber, das dies einfach(er) umzusetzen sei (liegt aber wohl am Eltako/Enocean -System, die halt keine Positionsangaben rückmelden). Es muss halt jetzt (leider) erst mal warten, andere Dinge muss ich endlich starten (MQTT-Adaper, Zigbee, ...).Thx to all!
-
@paul53
Hi,
hab es mal versucht das Blockly korrekt nachzubauen, aber es funktioniert nicht so wie es soll, evtl. hab ich da auch noch Fehler drinnen ...
Hab jetzt alle Rollladen-Aliase angelegt, ich muss jetzt mal schauen, das ich im eigentlichen Smarthome weiterkomme (Lichter, Temperaturen, Dashboard, ...).
Die Ansteuerung der Rollläden auf Position X will ich wirklich gerne haben, dachte aber, das dies einfach(er) umzusetzen sei (liegt aber wohl am Eltako/Enocean -System, die halt keine Positionsangaben rückmelden). Es muss halt jetzt (leider) erst mal warten, andere Dinge muss ich endlich starten (MQTT-Adaper, Zigbee, ...).Thx to all!
So,
auch wenn ich das anfahren bestimmter Positionen erstmal nach hinten stellen will,
habe ich nun ein kleines "Problem".Ich kann zwar die Rollläden hoch/runter steuern, aber in der vis-2 erhalte ich keine Rückmeldung, wenn die Rollladenfahrt beendet (autom. gestoppt, Endstellung) hat. Die Taste (Pfeil runter) ist immer aktiv (Bsp. Pfeil hoch).
Ebenso bekommt die vis-2 nicht mit, wenn der Rollladen lokal bedient wird, das Symbol steht immer auf "stop" (obwohl der Rolllladen geräde fährt).
Wie kann man das lösen, geht das über "Unterschiedliche IDs für Lesen und Schreiben", oder benötigt das ein Script ? (
 )
)

-
So,
auch wenn ich das anfahren bestimmter Positionen erstmal nach hinten stellen will,
habe ich nun ein kleines "Problem".Ich kann zwar die Rollläden hoch/runter steuern, aber in der vis-2 erhalte ich keine Rückmeldung, wenn die Rollladenfahrt beendet (autom. gestoppt, Endstellung) hat. Die Taste (Pfeil runter) ist immer aktiv (Bsp. Pfeil hoch).
Ebenso bekommt die vis-2 nicht mit, wenn der Rollladen lokal bedient wird, das Symbol steht immer auf "stop" (obwohl der Rolllladen geräde fährt).
Wie kann man das lösen, geht das über "Unterschiedliche IDs für Lesen und Schreiben", oder benötigt das ein Script ? (
)
@topsurfer sagte: benötigt das ein Script ?
Ja, "CMD" steuert nur und liefert keine Rückmeldung. Für die Rückmeldung sollte das Positionsskript dienen.
Übrigens hatte ich das hier beschriebene Verhalten erwartet:
Aktor: Eltako - FSB61NP-230v
Bei allen meiner FSB61 wird TT (Gefahrene-Zeit) nach der Rückgabe der Fahrzeit wieder mit 0 überschrieben (Fehler?)
Dafür werden die Relais DO und UP nach dem Stoppen wieder auf "false" gesetzt (kein Fehler).Wie @mcbeath schreibt, verhalten sich nicht alle Aktoren so.
-
@topsurfer sagte: benötigt das ein Script ?
Ja, "CMD" steuert nur und liefert keine Rückmeldung. Für die Rückmeldung sollte das Positionsskript dienen.
Übrigens hatte ich das hier beschriebene Verhalten erwartet:
Aktor: Eltako - FSB61NP-230v
Bei allen meiner FSB61 wird TT (Gefahrene-Zeit) nach der Rückgabe der Fahrzeit wieder mit 0 überschrieben (Fehler?)
Dafür werden die Relais DO und UP nach dem Stoppen wieder auf "false" gesetzt (kein Fehler).Wie @mcbeath schreibt, verhalten sich nicht alle Aktoren so.
@paul53
Die Zeit TT wird ja zurückgeben nur danach wieder mit 0 überschrieben, zumindest bei den FSB61.
Ich muss also den trigger auf TT verweisen und dann mit dem request Wert arbeiten. Ich kann nicht mehr den Wert vom Datenpunkt verwenden weil der ja mit 0 aktualisiert wird. -
So,
auch wenn ich das anfahren bestimmter Positionen erstmal nach hinten stellen will,
habe ich nun ein kleines "Problem".Ich kann zwar die Rollläden hoch/runter steuern, aber in der vis-2 erhalte ich keine Rückmeldung, wenn die Rollladenfahrt beendet (autom. gestoppt, Endstellung) hat. Die Taste (Pfeil runter) ist immer aktiv (Bsp. Pfeil hoch).
Ebenso bekommt die vis-2 nicht mit, wenn der Rollladen lokal bedient wird, das Symbol steht immer auf "stop" (obwohl der Rolllladen geräde fährt).
Wie kann man das lösen, geht das über "Unterschiedliche IDs für Lesen und Schreiben", oder benötigt das ein Script ? (
)
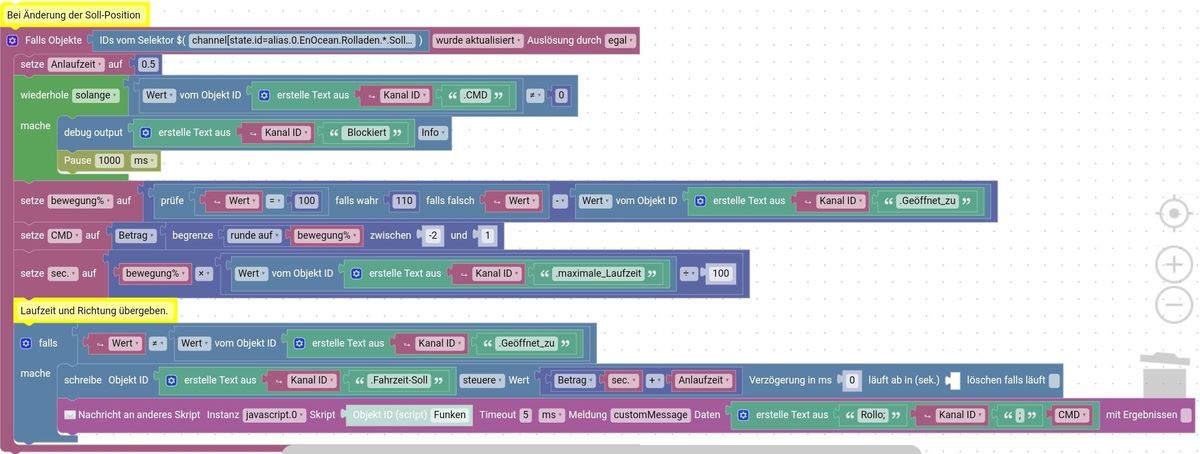
@topsurfer
Die Bestimmung der der Rolladen Position mache ich mit diesem Skript:

Endschalter erreicht:

Änderung des Soll-Werts:
-
@topsurfer sagte: benötigt das ein Script ?
Ja, "CMD" steuert nur und liefert keine Rückmeldung. Für die Rückmeldung sollte das Positionsskript dienen.
Übrigens hatte ich das hier beschriebene Verhalten erwartet:
Aktor: Eltako - FSB61NP-230v
Bei allen meiner FSB61 wird TT (Gefahrene-Zeit) nach der Rückgabe der Fahrzeit wieder mit 0 überschrieben (Fehler?)
Dafür werden die Relais DO und UP nach dem Stoppen wieder auf "false" gesetzt (kein Fehler).Wie @mcbeath schreibt, verhalten sich nicht alle Aktoren so.
@paul53 said in Verständnisfrage: Virtuelle Schalter und nutzen in Blockly:
Ja, "CMD" steuert nur und liefert keine Rückmeldung. Für die Rückmeldung sollte das Positionsskript dienen.
Welches Script meine jetzt genau (wie gesagt, es geht mir jetzt nur um die korrekte Status Info des Rolladens, der "Bewegung", keine Positionsinfo (das kommt später, muss erstmal die notwendigsten Grundfunktionen integrieren ...)
-
@paul53 said in Verständnisfrage: Virtuelle Schalter und nutzen in Blockly:
Ja, "CMD" steuert nur und liefert keine Rückmeldung. Für die Rückmeldung sollte das Positionsskript dienen.
Welches Script meine jetzt genau (wie gesagt, es geht mir jetzt nur um die korrekte Status Info des Rolladens, der "Bewegung", keine Positionsinfo (das kommt später, muss erstmal die notwendigsten Grundfunktionen integrieren ...)
@topsurfer
Dazu solltest du DO und UP auf "true" und "false" prüfen.
Wobei bei mir manche Aktoren beim stoppen nicht auf "false" gesetzt werden. Dann wäre es ganz einfach. -
@paul53
Die Zeit TT wird ja zurückgeben nur danach wieder mit 0 überschrieben, zumindest bei den FSB61.
Ich muss also den trigger auf TT verweisen und dann mit dem request Wert arbeiten. Ich kann nicht mehr den Wert vom Datenpunkt verwenden weil der ja mit 0 aktualisiert wird.@mcbeath sagte: Die Zeit TT wird ja zurückgeben nur danach wieder mit 0 überschrieben
Dann triggere auf "ist größer als letztes".
Die Aktoren von @topsurfer verhalten sich offenbar so, wie deine Eltako FJ62NP-230v: "TT"-Wert bleibt erhalten, aber "DO" und "UP" bleiben auf true, wenn die Bewegung beendet ist.
-
@mcbeath sagte: Die Zeit TT wird ja zurückgeben nur danach wieder mit 0 überschrieben
Dann triggere auf "ist größer als letztes".
Die Aktoren von @topsurfer verhalten sich offenbar so, wie deine Eltako FJ62NP-230v: "TT"-Wert bleibt erhalten, aber "DO" und "UP" bleiben auf true, wenn die Bewegung beendet ist.
-
@paul53
Das funktioniert nicht, da nicht alle Aktoren dieses verhalten haben.
Darum triggere ich auf Aktualisiert und werte nur aus wenn der Wert ungleich 0 ist. -
@mcbeath sagte: da nicht alle Aktoren dieses verhalten haben.
Ach ja, du triggerst mit Selektor. Trigger auf "ist größer als letztes" sollte aber auch mit den Aktoren funktionieren, die nicht auf 0 zurück gesetzt werden.
-
@paul53
Hab es jetzt nicht ausproboert, aber rein logisch betrachtet, kann das nicht funktionieren.
TT ist mal 4>7>15>3>7>2
folglisch ist TT ja nicht immer größer als letztens.
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
518
Online32.9k
Benutzer83.2k
Themen1.3m
Beiträge