

Neuer Robonect HX Adapter
-
Und noch ein Problem mit dem Push-Service. Das Log sagt es gibt ein Problem.

Konfiguration ist auf beiden Seiten die 192.168.178.113 eingetragen. Mit User und Passwort.
PS: Vorher war mal die 192.168.178.68 eingetragen.

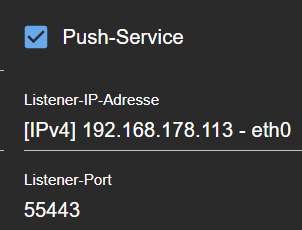
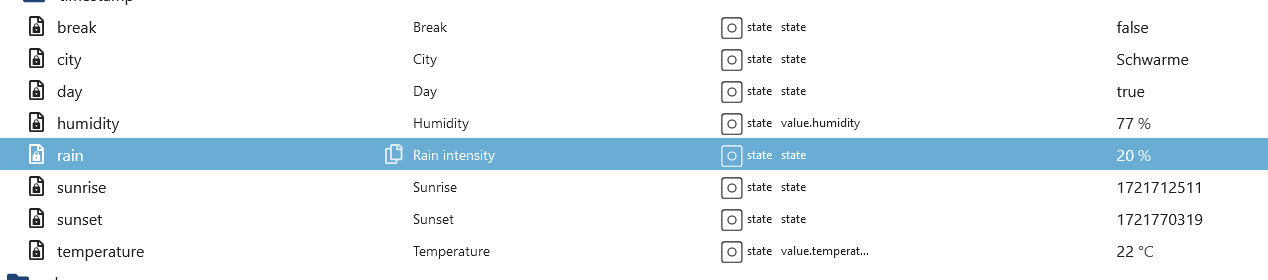
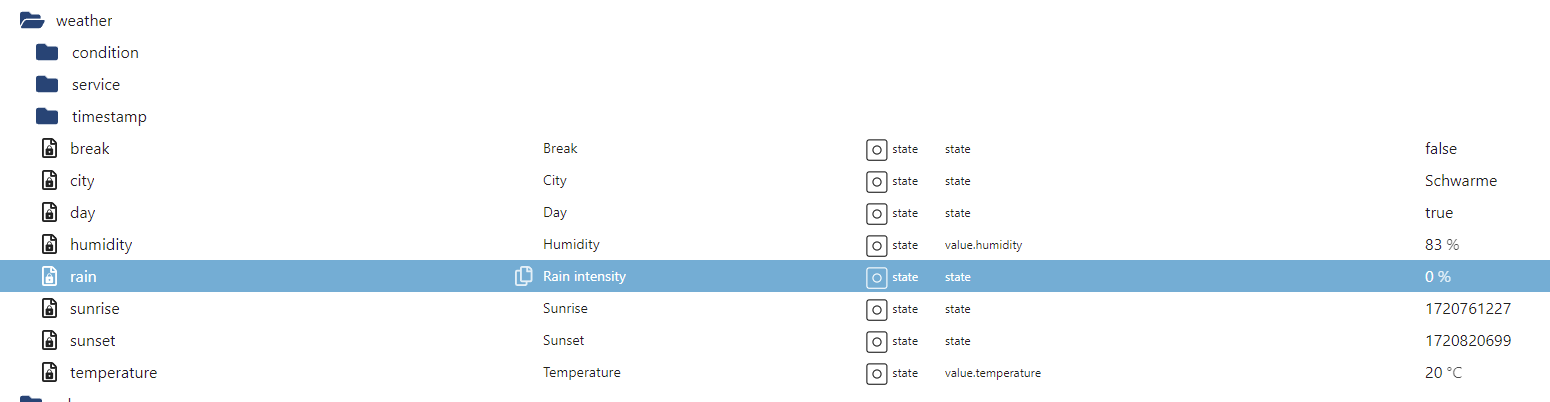
Robonect sagt alles erfolgreich:

Benutzt das Voting rechts unten im Beitrag wenn er euch geholfen hat.
-
Und noch ein Problem mit dem Push-Service. Das Log sagt es gibt ein Problem.
Konfiguration ist auf beiden Seiten die 192.168.178.113 eingetragen. Mit User und Passwort.
PS: Vorher war mal die 192.168.178.68 eingetragen.
Robonect sagt alles erfolgreich:
Da ich meinen Robi zwischenzeitlich wegen Schneefalls in den Winterurlaub geschickt habe und deswegen gerade nicht so richtig debuggen kann, habe ich mal Issues dazu aufgemacht, damit das nicht in Vergessenheit gerät:
https://github.com/Grizzelbee/ioBroker.robonect/issues/37
https://github.com/Grizzelbee/ioBroker.robonect/issues/38
https://github.com/Grizzelbee/ioBroker.robonect/issues/39Falls sich irgend etwas dazu ergibt (@Alle: auch Bestätigungen der/des Bugs) bitte dort vermerken.
-
@opossum sagte in Neuer Robonect HX Adapter:
würdest Du uns vielleicht den Export zur Verfüging stellen?
sicherlich (Design ist geklaut - nicht meine Kreation)!
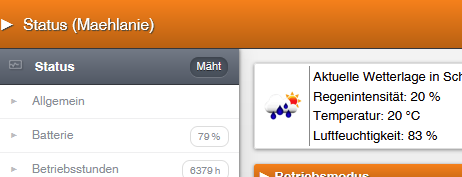
Um den Modus und Status als Klartext darstellen zu können, hab ich 2 Datenpunkte angelegt (werden mit folgenden Skripten befüllt), diese lauten bei mir:
-
javascript.0.Status.Flocki.Mode
-
javascript.0.Status.Flocki.Status
Skript für "Mode":
var Mode_akt; on({id: "robonect.0.status.mode", change: "ne"}, function (obj) { var value = obj.state.val; var oldValue = obj.oldState.val; Mode_akt = getState("robonect.0.status.mode").val; if (Mode_akt == 0) { setState("javascript.0.Status.Flocki.Mode", 'Auto', true); } else if (Mode_akt == 1) { setState("javascript.0.Status.Flocki.Mode", 'Manuell', true); } else if (Mode_akt == 2) { setState("javascript.0.Status.Flocki.Mode", 'Home', true); } else if (Mode_akt == 98) { setState("javascript.0.Status.Flocki.Mode", 'End of day', true); } else if (Mode_akt == 99) { setState("javascript.0.Status.Flocki.Mode", 'Job', true); } });Skript für "Status":
var Status_akt; on({id: "robonect.0.status.status", change: "ne"}, function (obj) { var value = obj.state.val; var oldValue = obj.oldState.val; Status_akt = getState("robonect.0.status.status").val; if (Status_akt == 0) { setState("javascript.0.Status.Flocki.Status", 'Unbekannt', true); } else if (Status_akt == 1) { setState("javascript.0.Status.Flocki.Status", 'Parken', true); } else if (Status_akt == 2) { setState("javascript.0.Status.Flocki.Status", 'Mähen', true); } else if (Status_akt == 3) { setState("javascript.0.Status.Flocki.Status", 'Suchen der Ladestation', true); } else if (Status_akt == 4) { setState("javascript.0.Status.Flocki.Status", 'Laden', true); } else if (Status_akt == 5) { setState("javascript.0.Status.Flocki.Status", 'Umsetzen', true); } else if (Status_akt == 7) { setState("javascript.0.Status.Flocki.Status", 'Fehler', true); } else if (Status_akt == 8) { setState("javascript.0.Status.Flocki.Status", 'Schleifensignal verloren', true); } else if (Status_akt == 16) { setState("javascript.0.Status.Flocki.Status", 'Abgeschaltet', true); } else if (Status_akt == 17) { setState("javascript.0.Status.Flocki.Status", 'Schlafen', true); } });Skript für die Mähtage:
var Timer_Tage; schedule('{"time":{"exactTime":true,"start":"18:24"},"period":{"days":1}}', function () { Timer_Tage = ''; if (getState("robonect.0.timer.0.weekdays.monday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Mo'; } else { Timer_Tage += ', Mo'; } } if (getState("robonect.0.timer.0.weekdays.tuesday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Di'; } else { Timer_Tage += ', Di'; } } if (getState("robonect.0.timer.0.weekdays.wednesday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Mi'; } else { Timer_Tage += ', Mi'; } } if (getState("robonect.0.timer.0.weekdays.thursday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Do'; } else { Timer_Tage += ', Do'; } } if (getState("robonect.0.timer.0.weekdays.friday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Fr'; } else { Timer_Tage += ', Fr'; } } if (getState("robonect.0.timer.0.weekdays.saturday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'Sa'; } else { Timer_Tage += ', Sa'; } } if (getState("robonect.0.timer.0.weekdays.sunday").val == true) { if (Timer_Tage == '') { Timer_Tage += 'So'; } else { Timer_Tage += ', So'; } } if (Timer_Tage != '') { Timer_Tage += ' von '; Timer_Tage += String(('' + getState("robonect.0.timer.0.start_time").val)); Timer_Tage += ' bis '; Timer_Tage += String(('' + getState("robonect.0.timer.0.end_time").val)); Timer_Tage += ' Uhr'; } setState("javascript.0.Status.Flocki.Tage_Timer"/*Tage_Timer*/, Timer_Tage, true); });Wetterpause & Fehler an telegram senden:
var Flocki_Status_alt, timeout; on({id: "robonect.0.status.status"/*Current status*/, change: "ne"}, function (obj) { var value = obj.state.val; var oldValue = obj.oldState.val; Flocki_Status_alt = getState("robonect.0.status.status").val; if (Flocki_Status_alt == 2 && (getState("javascript.0.Wetterstation.Regen_Tag").val >= 0.5 || getState("javascript.0.Wetterstation.Aussentemperatur").val <= 1)) { // Pause: bisherige Regenmenge > 0,5 l/m² oder Temp < 1°C -> Feierabend setState("robonect.0.status.mode"/*Current mode*/, 98); // -> Feierabend setState("javascript.0.Status.Flocki.Regenpause"/*Regenpause*/, ([formatDate(new Date(), "YYYY.MM.DD"),' ',formatDate(new Date(), "hh:mm:ss")].join('')), true); } else if (Flocki_Status_alt == 7) { // Fehler! Telegram-Nachricht senden timeout = setTimeout(function () { sendTo("telegram", "send", { text: (['Störung bei Flocki !!!','\n','Fehler: ',getState("robonect.0.error.0.message").val,'\n','am ',getState("robonect.0.error.0.date").val,' um ',getState("robonect.0.error.0.time").val,' Uhr!'].join('')) }); }, 120000); } });Und hier noch die View: Robonect_view.txt
WLAN-Empfang: Robonect_WLAN.txt
Fehlermeldungen: Robonect_error.txtmaterialdesign (in allen Varianten die es gibt) sind erforderlich!
Programmierung ist verbesserungswürdig (lerne gerade damit umzugehen) und vis ist eher als quick&dirty zu bezeichnen und noch nicht vollständig, z.B. Fehleranzeige, ... ;-)
@latzi
erstmal Danke für deine Scripte. Funktionieren nach Anpassungen super.
Jedoch bekomme ich keine Daten bei dem Script Mähtage. was genau muss ich da anpassen?
etwas bei Time?
Meine 2, Frage wär, wo du die letzte Mäh- und Ladezeit und die Strecken her bekommst? -
-
@latzi
erstmal Danke für deine Scripte. Funktionieren nach Anpassungen super.
Jedoch bekomme ich keine Daten bei dem Script Mähtage. was genau muss ich da anpassen?
etwas bei Time?
Meine 2, Frage wär, wo du die letzte Mäh- und Ladezeit und die Strecken her bekommst? -
@stimpy23 sagte in Neuer Robonect HX Adapter:
Jedoch bekomme ich keine Daten bei dem Script Mähtage. was genau muss ich da anpassen?
etwas bei Time?Hast du in den Einstellungen der Instanz den Timer aktiviert?
-
wie schauen die DP´s unter
robonect.0.timer.0.weekdaysaus (steht da bei irgendeinem Tagtrue?):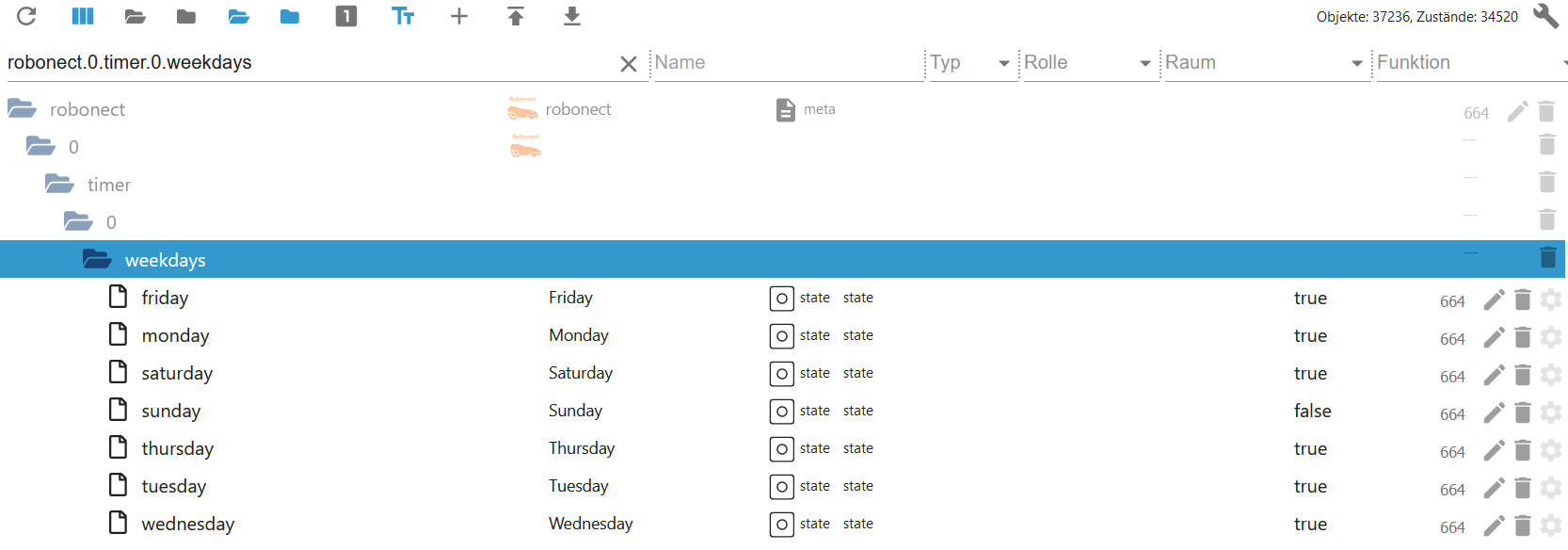
In Robonect sind auch Zeiten defniert?
-
@stimpy23
Wann hast du das Script erstellt? Heute? Es läuft nur 1 Mal am Tag ;-)
Zeig mal dein Script. -
{ "type": "state", "common": { "name": "Timer status", "type": "number", "role": "state", "read": true, "write": false, "desc": "", "states": { "0": "Deaktiviert", "1": "Aktiv", "2": "Standby" } }, "native": {}, "from": "system.adapter.robonect.0", "user": "system.user.admin", "ts": 1715968728146, "_id": "robonect.0.timer.status", "acl": { "object": 1636, "state": 1636, "owner": "system.user.admin", "ownerGroup": "system.group.administrator" } }0, 1, 2
-
@myssv
Benutzt du Proxmox? Da hatte ich auch mal Probleme mit unterschiedlichen Werten.
Da kam dann auch immer ein Ping Fehler im Log.@afuerhoff ja ich nutze alles unter Proxmox.
Die Ping Fehler habe ich, wenn sich der Rasenmäher zur Ruhe setzt. (Nacht oder Pausen wegen Wetter etc.)
Aber wenn er mäht sind alle Werte plausibel, bis auf eben dieser Wert, der immer auf "0" bleibt.
Daher ja meine Frage, ob bei irgendeinem anderen User jemals ein Wert anzeigt wird?
-
@afuerhoff ja ich nutze alles unter Proxmox.
Die Ping Fehler habe ich, wenn sich der Rasenmäher zur Ruhe setzt. (Nacht oder Pausen wegen Wetter etc.)
Aber wenn er mäht sind alle Werte plausibel, bis auf eben dieser Wert, der immer auf "0" bleibt.
Daher ja meine Frage, ob bei irgendeinem anderen User jemals ein Wert anzeigt wird?
-
@myssv
Hast Du das gesehen?
https://github.com/Grizzelbee/ioBroker.robonect?tab=readme-ov-file#known-issues
Das hat bei mir alle Probleme gelöst@afuerhoff Bisher nicht, Danke!
Das kann ich ja mal probieren.
-
@myssv
Hast Du das gesehen?
https://github.com/Grizzelbee/ioBroker.robonect?tab=readme-ov-file#known-issues
Das hat bei mir alle Probleme gelöst@afuerhoff sagte in Neuer Robonect HX Adapter:
Das hat bei mir alle Probleme gelöst
Du bist mein Held:
Vielen Dank!!
-
@afuerhoff sagte in Neuer Robonect HX Adapter:
Das hat bei mir alle Probleme gelöst
Du bist mein Held:
Vielen Dank!!
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren Anmelden426
Online33.0k
Benutzer83.4k
Themen1.3m
Beiträge