

Position von Mähroboter in einem Bild anzeigen lassen
-
Hallo,
wir haben eine Mähroboter (Navimow i205e), einen iobroker-Adapter dafür gibt es auch schon (danke dafür!).
Dieser liefert die Positionsdaten ausgehend von der Basistation relativ in X- und Y- Werten.
(Bsp: -1.03, 7.23)
(diese könnte man auch in GPS Koordinaten umrechnen, aber würde das helfen?)Würde nun gerne in einem "Bild" (Skizze vom Garten) diese Position anzeigen um zu sehen, wo sich der Roboter aktuell immer befindet.
Jemand eine Idee wie sich das umsetzen läßt in iobroker?
Gibt es einen Adapter der dafür geeignet ist? -
Hallo,
wir haben eine Mähroboter (Navimow i205e), einen iobroker-Adapter dafür gibt es auch schon (danke dafür!).
Dieser liefert die Positionsdaten ausgehend von der Basistation relativ in X- und Y- Werten.
(Bsp: -1.03, 7.23)
(diese könnte man auch in GPS Koordinaten umrechnen, aber würde das helfen?)Würde nun gerne in einem "Bild" (Skizze vom Garten) diese Position anzeigen um zu sehen, wo sich der Roboter aktuell immer befindet.
Jemand eine Idee wie sich das umsetzen läßt in iobroker?
Gibt es einen Adapter der dafür geeignet ist?Jemand eine Idee wie sich das umsetzen läßt in iobroker?
Also:
Du könntest in der VIS (vermutlich auch VIS2) in einer View deine Skizze hinterlegen.
Du weist wo auf der Skizze die Basiststation ist und hast die Position dazu.Eine Z Ebene über deiner Skizze blendets du ein Symbolbild für deinen Mäher ein.
Bei dessen X und Y Position setzt du ein Binding ein:
Per Skipt musst du nun bei einer Änderung der X und/oder Y Position die passende Koordinate in deiner View berechenen, Ist die 1280 Pixel breit und 800 hoch musst du per Dreisatz die passende Position ermitteln und in den Datenpunkt schreiben.
Statt Pixel kannst du da auch % reinschreiben (also Zahl gefolgt von % Zeichen), der ist dann im Verhältnis zur Größe der View.
-
Jemand eine Idee wie sich das umsetzen läßt in iobroker?
Also:
Du könntest in der VIS (vermutlich auch VIS2) in einer View deine Skizze hinterlegen.
Du weist wo auf der Skizze die Basiststation ist und hast die Position dazu.Eine Z Ebene über deiner Skizze blendets du ein Symbolbild für deinen Mäher ein.
Bei dessen X und Y Position setzt du ein Binding ein:
Per Skipt musst du nun bei einer Änderung der X und/oder Y Position die passende Koordinate in deiner View berechenen, Ist die 1280 Pixel breit und 800 hoch musst du per Dreisatz die passende Position ermitteln und in den Datenpunkt schreiben.
Statt Pixel kannst du da auch % reinschreiben (also Zahl gefolgt von % Zeichen), der ist dann im Verhältnis zur Größe der View.
Per Skipt musst du nun bei einer Änderung der X und/oder Y Position die passende Koordinate in deiner View berechenen, Ist die 1280 Pixel breit und 800 hoch musst du per Dreisatz die passende Position ermitteln und in den Datenpunkt schreiben.
Das umrechnen der orig. X/Y Werte muss in einem Script erfolgen?
Also "Wenn Wert von X oder Y sich geändert hat, dann ..." ...
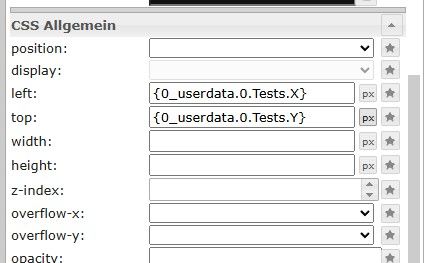
Weil dies ja ca. 3x pro Sekunde erfolgt ...Direkt in der vis(2) bei "CSS Allgemein" kann ich keine Rechenoperation hinzufügen?
a'la: ( 100 + {alias.0.Aussen.Mähroboter.postureX}) * 20Oder in einem erstellten Hilfsdatenpunkt, dass dieser Wert den Wert von (PostureX + 100) *20
hat? -
Per Skipt musst du nun bei einer Änderung der X und/oder Y Position die passende Koordinate in deiner View berechenen, Ist die 1280 Pixel breit und 800 hoch musst du per Dreisatz die passende Position ermitteln und in den Datenpunkt schreiben.
Das umrechnen der orig. X/Y Werte muss in einem Script erfolgen?
Also "Wenn Wert von X oder Y sich geändert hat, dann ..." ...
Weil dies ja ca. 3x pro Sekunde erfolgt ...Direkt in der vis(2) bei "CSS Allgemein" kann ich keine Rechenoperation hinzufügen?
a'la: ( 100 + {alias.0.Aussen.Mähroboter.postureX}) * 20Oder in einem erstellten Hilfsdatenpunkt, dass dieser Wert den Wert von (PostureX + 100) *20
hat?Das umrechnen der orig. X/Y Werte muss in einem Script erfolgen?
Also "Wenn Wert von X oder Y sich geändert hat, dann ..." ...
Weil dies ja ca. 3x pro Sekunde erfolgt ...Direkt in der vis(2) bei "CSS Allgemein" kann ich keine Rechenoperation hinzufügen?
a'la: ( 100 + {alias.0.Aussen.Mähroboter.postureX}) * 20Oder in einem erstellten Hilfsdatenpunkt, dass dieser Wert den Wert von (PostureX + 100) *20
hat?Naja, irgendwo musst du es rechnen, ob direkt in der VIS der ideale Ort dafür ist - vielleicht.
Natürlich könntest du einen Verzögerung einbauen wenn er 3x die Sekunde aktualisiert. Oder halt per Timer alle x Sekunden. Alle 10 würde vermutlich auch reichen, oder jede Minute -
Hab es in einem extra Blockly gelöst - ist doch mehr zu rechnen als ich zunächst dachte.
Frage, kann ich diese Zahlenwerte (grün umrandet) auch in Blockly irgendwie auslesen / ermitteln ?
Sind Werte wie sie im Widget drin stehen.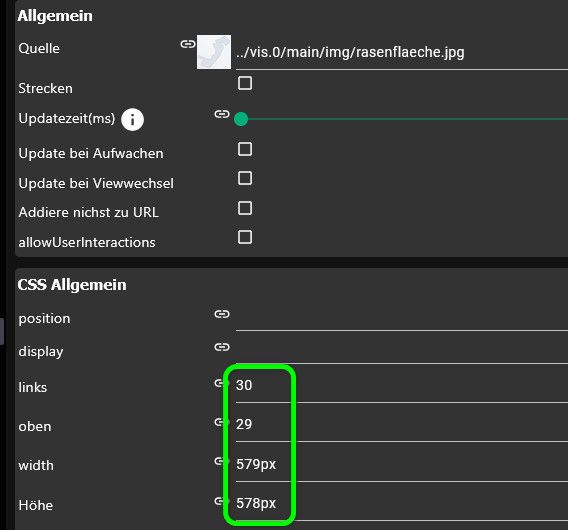
-
Hallo,
wir haben eine Mähroboter (Navimow i205e), einen iobroker-Adapter dafür gibt es auch schon (danke dafür!).
Dieser liefert die Positionsdaten ausgehend von der Basistation relativ in X- und Y- Werten.
(Bsp: -1.03, 7.23)
(diese könnte man auch in GPS Koordinaten umrechnen, aber würde das helfen?)Würde nun gerne in einem "Bild" (Skizze vom Garten) diese Position anzeigen um zu sehen, wo sich der Roboter aktuell immer befindet.
Jemand eine Idee wie sich das umsetzen läßt in iobroker?
Gibt es einen Adapter der dafür geeignet ist?Ich habe mal einen Adapter erstellt, der diese Möglichkeiten hat Marker oder auch einen Pfad in einer Karte anhand von gps Koordinaten anzuzeigen.
Was ich nicht weiß, sind deine gps Koordinaten fein genug, als das die Position sagen wir mal auf 10 cm genau angezeigt wird.
Die Anzeige erfolgt über eine json datenstruktur.
Der Adapter befindet sich allerdings nicht im Beta repository, da es bisher noch nicht genügend Tester gab, er kann aber über den Katzenkopf aus npm installiert werden.
Bei mir funktioniert er gut.https://github.com/oweitman/ioBroker.vis-mapwidgets
Nachtrag
Für 11cm genau benötigt man 6 nachkommastellen
Für 1,1cm dann 7
Das gps Signal selbst ist für nicht militärische Nutzung nur bei 3bis10 Meter.
Aber evtl interpoliert der Roboter aufgrund seiner bewegungsinformationen dann das entsprechend fein. -
Ich habe mal einen Adapter erstellt, der diese Möglichkeiten hat Marker oder auch einen Pfad in einer Karte anhand von gps Koordinaten anzuzeigen.
Was ich nicht weiß, sind deine gps Koordinaten fein genug, als das die Position sagen wir mal auf 10 cm genau angezeigt wird.
Die Anzeige erfolgt über eine json datenstruktur.
Der Adapter befindet sich allerdings nicht im Beta repository, da es bisher noch nicht genügend Tester gab, er kann aber über den Katzenkopf aus npm installiert werden.
Bei mir funktioniert er gut.https://github.com/oweitman/ioBroker.vis-mapwidgets
Nachtrag
Für 11cm genau benötigt man 6 nachkommastellen
Für 1,1cm dann 7
Das gps Signal selbst ist für nicht militärische Nutzung nur bei 3bis10 Meter.
Aber evtl interpoliert der Roboter aufgrund seiner bewegungsinformationen dann das entsprechend fein. -
Hab es in einem extra Blockly gelöst - ist doch mehr zu rechnen als ich zunächst dachte.
Frage, kann ich diese Zahlenwerte (grün umrandet) auch in Blockly irgendwie auslesen / ermitteln ?
Sind Werte wie sie im Widget drin stehen.Hab es in einem extra Blockly gelöst - ist doch mehr zu rechnen als ich zunächst dachte.
Frage, kann ich diese Zahlenwerte (grün umrandet) auch in Blockly irgendwie auslesen / ermitteln ?
Sind Werte wie sie im Widget drin stehen.Die sind doch statisch, oder?
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
558
Online32.9k
Benutzer83.2k
Themen1.3m
Beiträge