

Navimow Steuerung ioBroker
-
 Hallo
Hallo
We kann mir mal helfen.
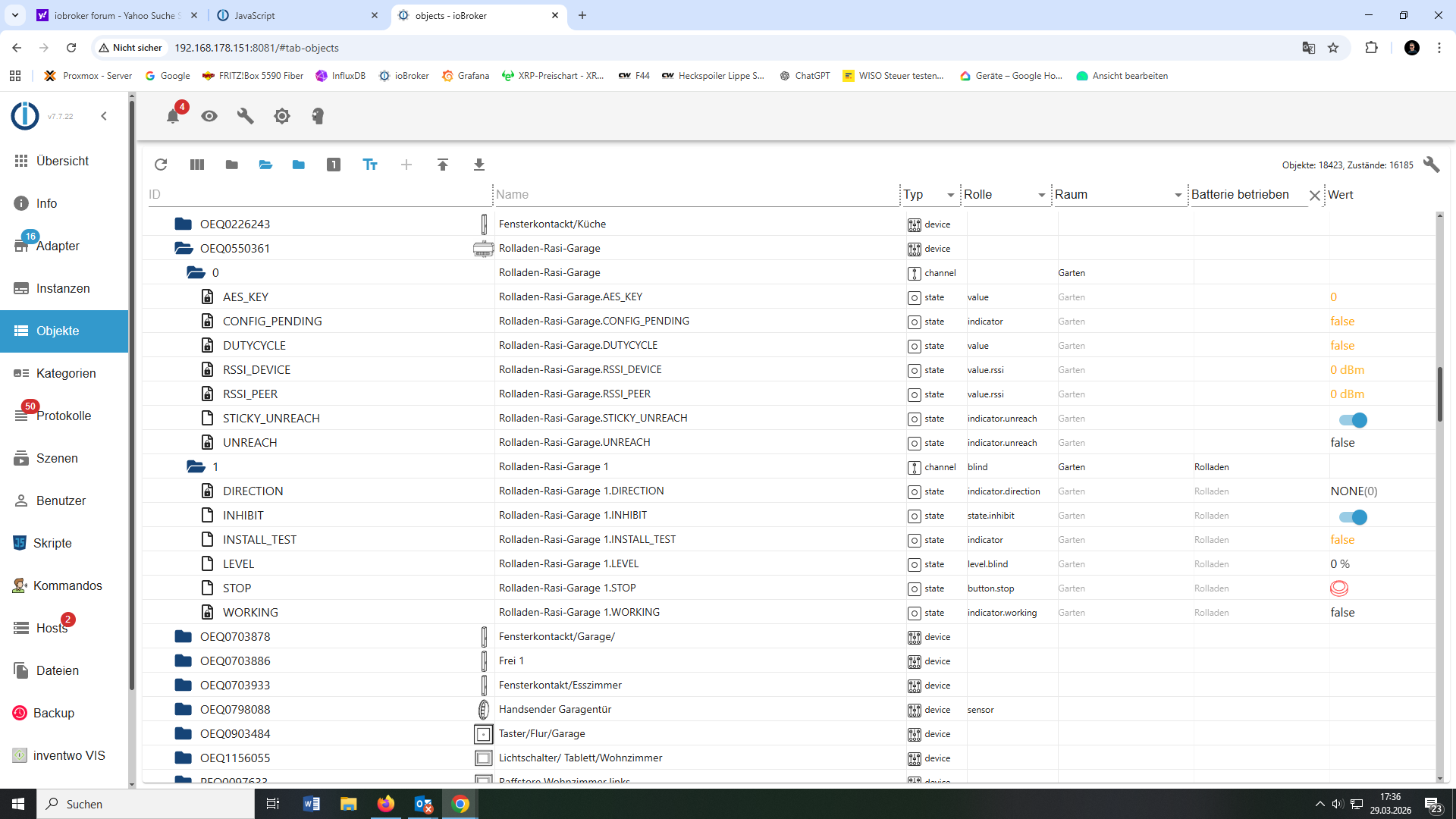
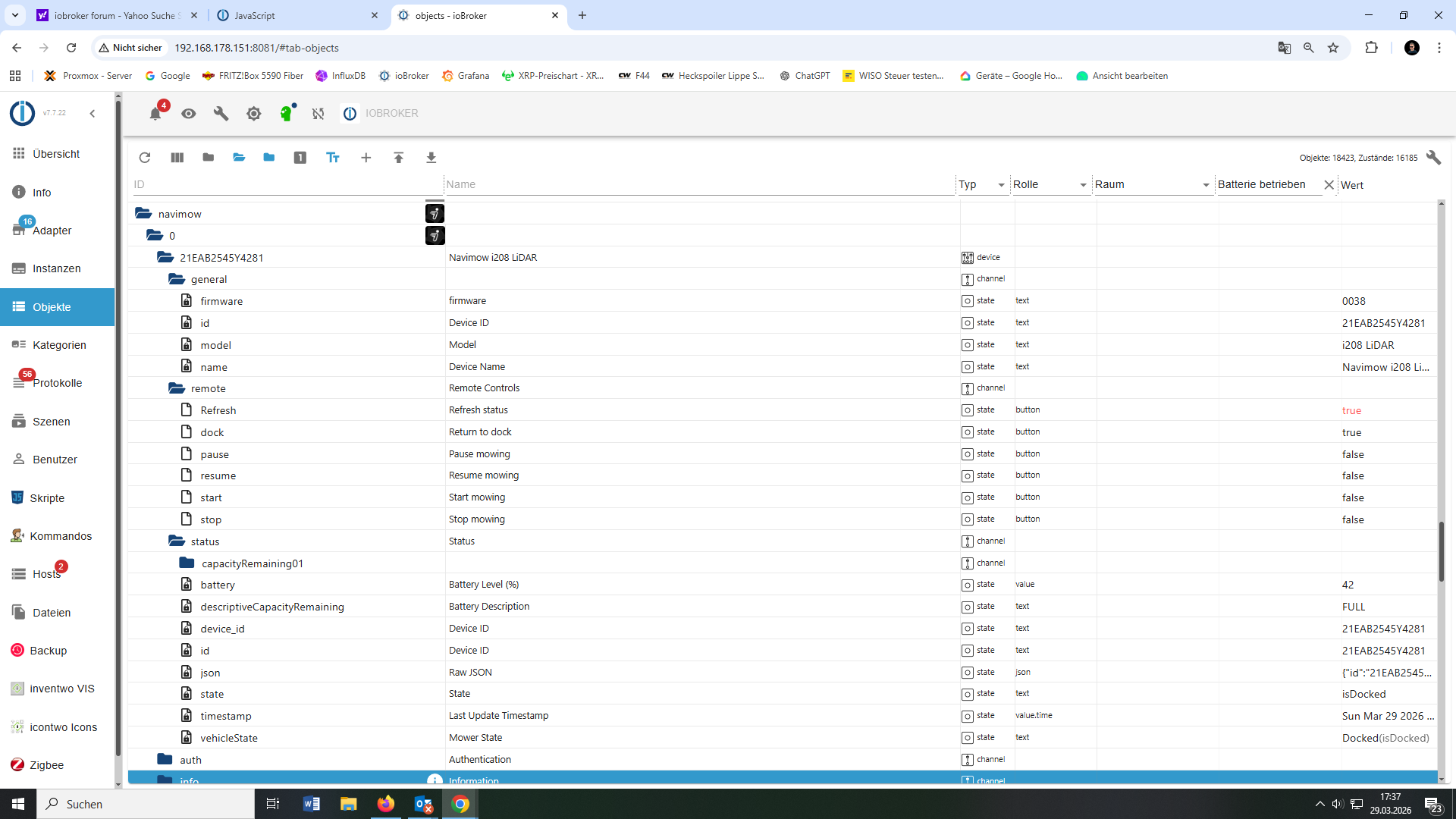
Ich habe einen Rasenrobotor der Firma Navimow i208 in ioBroker mit den Datenpunkten siehe Photo.
Dann habe ich eine Garage mit Rolltoor Elektrisch das auch in ioBroker ist mit den Datenpunkten siehe Photo.
Ich möchte gerne eine Steuerung haben, wo ich ein Taster auf mein Tablett drücke und das Rolltoor aufgeht und nach 2 Minuten soll der Mäher aus ger Garage fahren und seine arbeit verrichten , und wenn er wieder angedockt hat an der Kadestation dann soll das Rolltoor wieder schliessen.
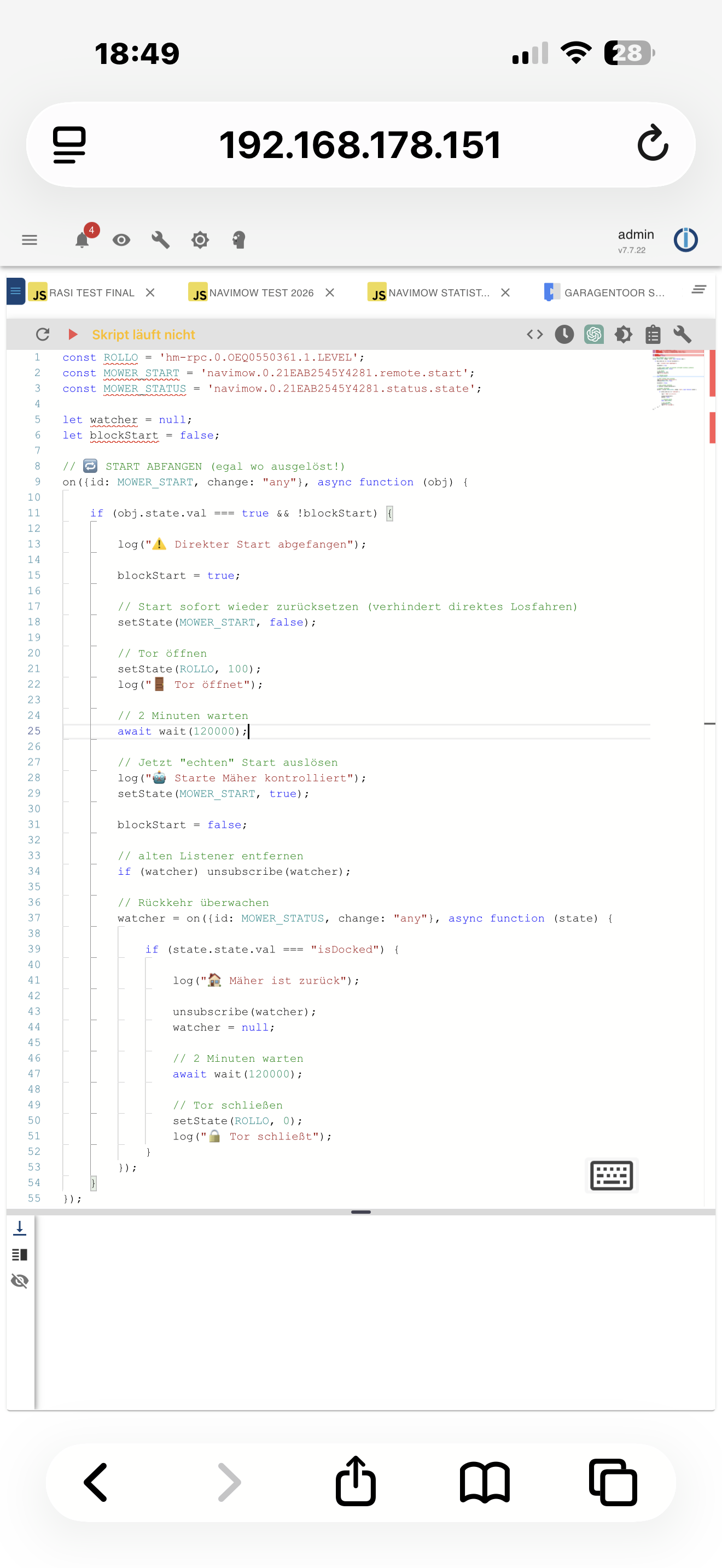
Ich habe esa mal versucht so wie im crypt, aber dann geht das rolltoor gleichzeiti mit dem start des mähers auf.Ich würde mich sehr über Eure Hilfe freuen, wenn mir da mal jemand was basteln könnte.
Bilder von den Datenpunkten und mein crypt
const ROLLO = 'hm-rpc.0.OEQ0550361.1.LEVEL';
const MOWER_START = 'navimow.0.21EAB2545Y4281.remote.start';
const MOWER_STATUS = 'navimow.0.21EAB2545Y4281.status.state'; -
KI Antwort:
Das Problem in deinem Skript ist klar: Du versuchst remote.start abzufangen und mit setState(MOWER_START, false) zurückzusetzen. Das funktioniert nicht, weil der Navimow-Adapter den Startbefehl sofort an die API sendet, bevor dein Skript ihn zurücksetzen kann. Deshalb fahren Tor und Mäher gleichzeitig los.Die Lösung: Einen eigenen Trigger-Button verwenden statt remote.start abzufangen.
Hier das korrigierte Skript:
// Garage + Mäher Steuerung const ROLLO = 'hm-rpc.0.OEQ0550361.1.LEVEL'; const MOWER_START = 'navimow.0.21EAB2545Y4281.remote.start'; const MOWER_STATUS = 'navimow.0.21EAB2545Y4281.status.state'; const TRIGGER = '0_userdata.0.Garage_Maeher_Start'; // Trigger-Datenpunkt erstellen (diesen Button auf dein Tablet legen) createState(TRIGGER, false, { name: 'Mäher mit Garagentor starten', type: 'boolean', role: 'button', read: true, write: true }); let running = false; let watcher = null; on({id: TRIGGER, change: "any", ack: false}, async function (obj) { if (obj.state.val !== true || running) return; running = true; // 1. Tor öffnen setState(ROLLO, 100); log("Tor öffnet"); // 2. Warten bis Tor komplett offen (2 Minuten) await wait(120000); // 3. Mäher starten log("Starte Mäher"); setState(MOWER_START, true); // 4. Rückkehr überwachen if (watcher) unsubscribe(watcher); watcher = on({id: MOWER_STATUS, change: "ne"}, async function (state) { if (state.state.val === "isDocked" && state.state.ack) { log("Mäher ist zurück"); unsubscribe(watcher); watcher = null; // 5. Warten bis Mäher in Garage (2 Minuten) await wait(120000); // 6. Tor schließen setState(ROLLO, 0); log("Tor schließt"); running = false; } }); });Was ist anders:
Eigener Trigger-Button (0_userdata.0.Garage_Maeher_Start) -- diesen Datenpunkt legst du auf dein Tablet statt remote.start. Der Mäher wird erst nach 2 Minuten Wartezeit gestartet, nicht sofort.
change: "ne" beim Status-Watcher -- reagiert nur auf tatsächliche Statusänderungen, nicht auf wiederholte Werte.
ack-Prüfung -- state.state.ack === true stellt sicher, dass nur bestätigte Statusänderungen vom Gerät verarbeitet werden.
running-Flag -- verhindert, dass der Ablauf doppelt gestartet wird.
So richtest du es ein:
Skript in ioBroker JavaScript-Adapter einfügen und starten
Der Datenpunkt 0_userdata.0.Garage_Maeher_Start wird automatisch erstellt
Diesen Button auf dein Tablet (z.B. in VIS oder Lovelace) legen
remote.start direkt nicht mehr als Auslöser verwenden -- wenn du den Mäher ohne Garage starten willst, kannst du remote.start weiterhin normal nutzen -
so sieht es jetzt aus und läuft auch erstmal.
// Garage + Mäher Steuerung
const ROLLO = 'hm-rpc.0.OEQ0550361.1.LEVEL';
const MOWER_START = 'navimow.0.21EAB2545Y4281.remote.start';
const MOWER_STATUS = 'navimow.0.21EAB2545Y4281.status.state';
const TRIGGER = '0_userdata.0.Garage_Maeher_Start';// ===== WLED =====
const wledOn = "wled.0.bcddc225fc96.on";
const wledPreset = "wled.0.bcddc225fc96.ps";
const wledBri = "wled.0.bcddc225fc96.bri";// ===== PRESETS =====
const PRESET_ROT = 1;
const PRESET_GRUEN = 2;
const PRESET_WEISS = 3;// Trigger-Datenpunkt erstellen
createState(TRIGGER, false, {
name: 'Mäher mit Garagentor starten',
type: 'boolean',
role: 'button',
read: true,
write: true
});let running = false;
let watcher = null;on({id: TRIGGER, change: "any", ack: false}, async function (obj) {
if (obj.state.val !== true || running) return;running = true; setState(TRIGGER, false, true); // 1. Tor öffnen setState(ROLLO, 100); log("➡️ Tor öffnet"); // 🔴 WLED ROT (Blinken Preset 1) setState(wledOn, true); setState(wledBri, 255); setState(wledPreset, PRESET_ROT); // 2. Warten bis Tor komplett offen (2 Minuten) await wait(120000); // 3. Mäher starten log("🤖 Starte Mäher"); setState(MOWER_START, true); // 🟢 WLED GRÜN (Preset 2) setState(wledPreset, PRESET_GRUEN); // 4. Rückkehr überwachen if (watcher) unsubscribe(watcher); watcher = on({id: MOWER_STATUS, change: "ne"}, async function (state) { if (state.state.val === "isDocked" && state.state.ack) { log("🏁 Mäher ist zurück"); unsubscribe(watcher); watcher = null; // 🔴 Wieder ROT (Blinken) setState(wledPreset, PRESET_ROT); // 5. Warten bis Mäher in Garage (2 Minuten) await wait(120000); // 6. Tor schließen setState(ROLLO, 0); log("🔒 Tor schließt"); // 7. Zeitfenster prüfen (20–23 Uhr) const hour = new Date().getHours(); if (hour >= 20 && hour < 23) { // ⚪ Weiß setState(wledPreset, PRESET_WEISS); log("💡 WLED Weiß (Abendmodus)"); } else { // 🔌 AUS setState(wledOn, false); log("🌙 WLED aus"); } running = false; } });});
Jetzt brauche ich nur noch ein Countdown für mein Button zum Starten der mir 120 Sekunden runterzählt bis der Mäher Los legt. Höttest du da eine Lösung noch für mich, wie ich das machen kann ?
-
// Garage + Mäher Steuerung const ROLLO = 'hm-rpc.0.OEQ0550361.1.LEVEL'; const MOWER_START = 'navimow.0.21EAB2545Y4281.remote.start'; const MOWER_STATUS = 'navimow.0.21EAB2545Y4281.status.state'; const TRIGGER = '0_userdata.0.Garage_Maeher_Start'; const COUNTDOWN = '0_userdata.0.Garage_Maeher_Countdown'; // ===== WLED ===== const wledOn = "wled.0.bcddc225fc96.on"; const wledPreset = "wled.0.bcddc225fc96.ps"; const wledBri = "wled.0.bcddc225fc96.bri"; // ===== PRESETS ===== const PRESET_ROT = 1; const PRESET_GRUEN = 2; const PRESET_WEISS = 3; // Trigger-Datenpunkt erstellen createState(TRIGGER, false, { name: 'Mäher mit Garagentor starten', type: 'boolean', role: 'button', read: true, write: true }); createState(COUNTDOWN, 0, { name: 'Countdown Mäher Start', type: 'number', unit: 's', read: true, write: false }); let running = false; let watcher = null; on({id: TRIGGER, change: "any", ack: false}, async function (obj) { if (obj.state.val !== true || running) return; running = true; setState(TRIGGER, false, true); // 1. Tor öffnen setState(ROLLO, 100); log("➡️ Tor öffnet"); // 🔴 WLED ROT (Blinken Preset 1) setState(wledOn, true); setState(wledBri, 255); setState(wledPreset, PRESET_ROT); // 2. Countdown 120 Sekunden for (let i = 120; i > 0; i--) { setState(COUNTDOWN, i); await wait(1000); } setState(COUNTDOWN, 0); // 3. Mäher starten log("🤖 Starte Mäher"); setState(MOWER_START, true); // 🟢 WLED GRÜN (Preset 2) setState(wledPreset, PRESET_GRUEN); // 4. Rückkehr überwachen if (watcher) unsubscribe(watcher); watcher = on({id: MOWER_STATUS, change: "ne"}, async function (state) { if (state.state.val === "isDocked" && state.state.ack) { log("🏁 Mäher ist zurück"); unsubscribe(watcher); watcher = null; // 🔴 Wieder ROT (Blinken) setState(wledPreset, PRESET_ROT); // 5. Countdown 120 Sekunden (Tor schließen) for (let i = 120; i > 0; i--) { setState(COUNTDOWN, i); await wait(1000); } setState(COUNTDOWN, 0); // 6. Tor schließen setState(ROLLO, 0); log("🔒 Tor schließt"); // 7. Zeitfenster prüfen (20–23 Uhr) const hour = new Date().getHours(); if (hour >= 20 && hour < 23) { // ⚪ Weiß setState(wledPreset, PRESET_WEISS); log("💡 WLED Weiß (Abendmodus)"); } else { // 🔌 AUS setState(wledOn, false); log("🌙 WLED aus"); } running = false; } }); });
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
552
Online33.0k
Benutzer83.3k
Themen1.3m
Beiträge