

Roborock: Nach Reinigung zur Koordinate fahren
-
Hallo zusammen,
ich versuche aktuell, meinen Roborock S8 Saugroboter via ioBroker zu automatisieren.
Ziel:
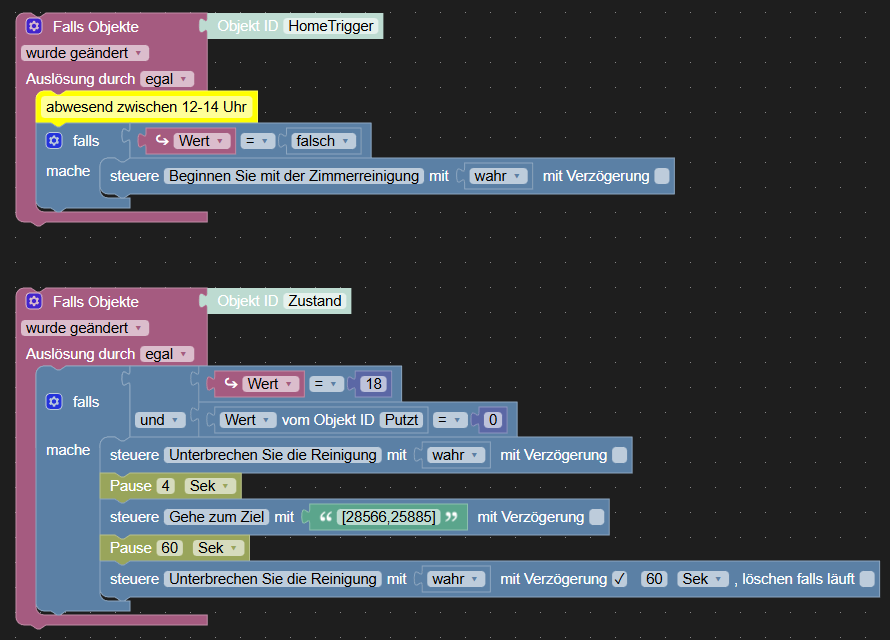
Wenn ich mittags das Haus verlasse (12-14 Uhr), dann soll der Roboter die Reinigung beginnen. Er soll aber nicht die gesamte Fläche saugen, sondern nur ausgewählte Zimmer. Wenn er mit der Reinigung fertig ist, soll er zu einer Koordinate in der Küche am Mülleimer fahren und dort pausieren. Nach der Entleerung schicke ich ihn dann manuell per Tastendruck am Roboter zurück zur Station zum Aufladen.Ich habe die Geodaten-Erkennung (Verlassen des Hauses) über den Yahka Adapter und einer entsprechenden Automatisierung an meinem iPhone eingerichtet. Der Roboter startet auch automatisch die Reinigung, wenn ich den Umkreis verlasse.
Er reinigt aber aktuell die gesamte Fläche, da ich es bisher nicht hinbekommen habe, dass er nur einzelne Räume reinigt.Daher folgende Fragen:
1. Wie kann ich einrichten, dass der Roboter nur einzelne Zimmer saugt? Ich habe keine Möglichkeit gefunden, die eingerichteten Programme mit dem Roborock-Adapter zu steuern. Ich sehe die verschiedenen Räume als Datenpunkte, weiß allerdings nicht, wie ich sie ansteuern kann.
2. Wie schaffe ich es, dass der Roboter nach der erfolgten Reinigung zu einer Koordinate fährt, statt zur Station? Ich sehe als größte Herausforderung, dass der Roborock-Adapter die Datenpunkte nur alle 60 Sekunden aktualisiert. Im schlechtesten Fall saugt der Roboter zuletzt das Zimmer, in der die Station steht und sendet wenige Sekunden vor Beendigung der Reinigung die aktuellen Daten und fährt danach zurück zur Station. In diesem Fall habe ich gar keine Möglichkeit einzugreifen, wenn der Roboter nur 20 Sekunden bis zur Station braucht. Habt ihr eine Lösung dafür oder einen Workaround? (Vielleicht kurze Zeit an der Station stehen und dann erst zur Koordinate fahren?)Anbei ein Screenshot, meines bisherigen Versuches mein Vorhaben einzurichten:
Das reine Ansteuern der Koordinate über den Datenpunkt funktioniert.
Kurze Infos zu meinem Setup:
ioBroker VM unter Proxmox
Betriebssystem: Debian 13 (trixie)
NodeJS: v22.21.0
Adapter: Roborock (dev_ts - Stand vom 11.12.25)
Saugroboter: Roborock S8 Standard
Handy: iPhone mit aktuellem iOSBesten Dank im Voraus!
Edit:
Nach einem Adapterneustart sehe ich auch die eingerichteten Programme aus der App. Dadurch ist Problem 1 behoben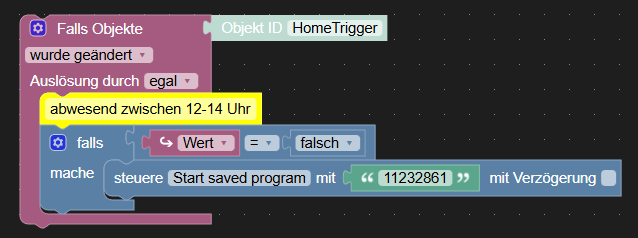
Hey! Du scheinst an dieser Unterhaltung interessiert zu sein, hast aber noch kein Konto.
Hast du es satt, bei jedem Besuch durch die gleichen Beiträge zu scrollen? Wenn du dich für ein Konto anmeldest, kommst du immer genau dorthin zurück, wo du zuvor warst, und kannst dich über neue Antworten benachrichtigen lassen (entweder per E-Mail oder Push-Benachrichtigung). Du kannst auch Lesezeichen speichern und Beiträge positiv bewerten, um anderen Community-Mitgliedern deine Wertschätzung zu zeigen.
Mit deinem Input könnte dieser Beitrag noch besser werden 💗
Registrieren AnmeldenSupport us
602
Online33.0k
Benutzer83.3k
Themen1.3m
Beiträge