


Roomba Instanz Link (gelöst )
-
Hallo zusammen
Ich habe bei mir den Roomba Adapter installiert und auch auf der Visu eingebunden mit den Befehlen. Jetzt ist mir aufgefallen, das ich über den Instanzlink, nicht auf die Seite des Saugroboter komme. Dort kann man ja den Plan einsehen, wo er gesaugt hat etc.
Woran kann das liegen?
-
Hallo,
in der Webkachel ist die falsche IP verlinkt. Das ist die des Saugers. Du musst da die IP des IOBroker einsetzen, dann sollte es gehen.
Grüße
ChrisMCF@chrismcf diese IP Adresse wird aber überall angezeigt wo der Roomba installiert ist:
Über den Instanzlink komme ich auf die gleiche Seite
-
@chrismcf diese IP Adresse wird aber überall angezeigt wo der Roomba installiert ist:
Über den Instanzlink komme ich auf die gleiche Seite
-
@stefu87_ch
Ja, das ist bei mir auch so. Gib einfach mal die IP vom IOBroker ein, dann kommst du auf die Webseite vom Sauger...@chrismcf Ahh jetzt geht es. Jetzt muss ich nur noch herausfinden, ob ich an die Map komme, wo ich sehe wie er gefahren ist.
-
@chrismcf Ahh jetzt geht es. Jetzt muss ich nur noch herausfinden, ob ich an die Map komme, wo ich sehe wie er gefahren ist.
-
@stefu87_ch
Die siehst du auf der Webseite. Muss aber CANVAS installiert sein. Die Anleitung von github funzt. Hab ich bei mir auch erst eingerichtet.@chrismcf
Du meinst das hier? Wenn ja, den 2.ten Teil verstehe ich nicht, wo ich das machen muss und wie genau: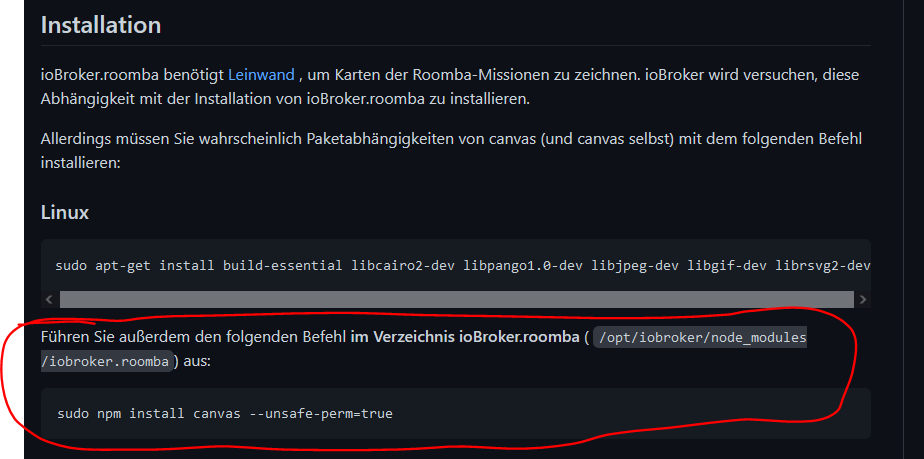
-
@chrismcf
Du meinst das hier? Wenn ja, den 2.ten Teil verstehe ich nicht, wo ich das machen muss und wie genau:@stefu87_ch
genau das meine ich. Du musst Putty oder ähnliches auf einem Rechner installieren und dann mit der Konsole (SSH) auf den Raspi. login ist Standard user: pi pw: raspberry (achtung kann auch raspberrz, wegen englicher Tastatur!!). dann musst du mit:cd /opt/iobroker/node_modules/iobroker.roombain das Verzeichnis und dann den Code ausm github kopieren. Falls du da noch Hilfe brauchst, gibt Bescheid.
-
@stefu87_ch
genau das meine ich. Du musst Putty oder ähnliches auf einem Rechner installieren und dann mit der Konsole (SSH) auf den Raspi. login ist Standard user: pi pw: raspberry (achtung kann auch raspberrz, wegen englicher Tastatur!!). dann musst du mit:cd /opt/iobroker/node_modules/iobroker.roombain das Verzeichnis und dann den Code ausm github kopieren. Falls du da noch Hilfe brauchst, gibt Bescheid.
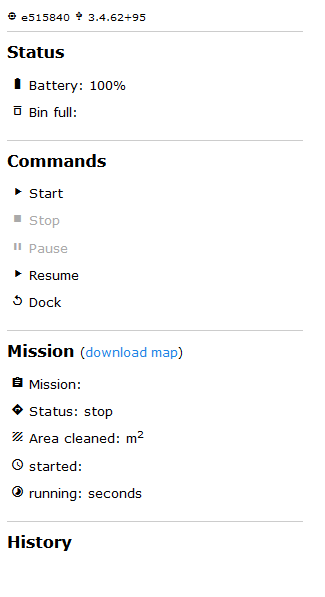
@chrismcf Hab das jetzt so gemacht, aber scheint wohl nicht so ganz zu funktionieren. Ansicht sieht so aus, obwohl er gefahren ist.
-
@chrismcf Hab das jetzt so gemacht, aber scheint wohl nicht so ganz zu funktionieren. Ansicht sieht so aus, obwohl er gefahren ist.
@stefu87_ch
Hmm... welchen Roomba hast du denn? Nicht, dass der keine Karte unterstützt. Selbst, wenn er nicht fährt, hast du ein Bild vom Sauger und so ein kleines Haus auf der Seite. Das was da drüber steht, über dem CANVAS hast du auch installiertsudo apt-get install build-essential libcairo2-dev libpango1.0-dev libjpeg-dev libgif-dev librsvg2-dev -
@stefu87_ch
Hmm... welchen Roomba hast du denn? Nicht, dass der keine Karte unterstützt. Selbst, wenn er nicht fährt, hast du ein Bild vom Sauger und so ein kleines Haus auf der Seite. Das was da drüber steht, über dem CANVAS hast du auch installiertsudo apt-get install build-essential libcairo2-dev libpango1.0-dev libjpeg-dev libgif-dev librsvg2-dev@chrismcf hab beide Sachen installiert.
Wir haben einen Roomba e5.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login564
Online32.7k
Users82.6k
Topics1.3m
Posts